



















Ronai Lisboa
Curso de Introdução à Física Clássica: Mecânica, Termodinâmica, Fluidos, Ondas e Oscilações e Eletromagnetismo para Bacharelado em Ciências e Tecnologias.
Objetivos
Reconhecer uma FORÇA como uma grandeza vetorial.
Reconhecer que a força altera o movimento ou altera a forma de um objeto.
Classificar as forças de curto alcance e de longo alcance.
Representar as forças.
Classificar as forças atrativas e repulsivas.
Bibliografia.
Tipler - Cap. 4
Seções 4.1 a 4.5 (pags. 93 a 103)
- Faça os exercícios resolvidos.
O mínimo obrigatório é estudar a referência e a lista de exercícios (veja SIGAA)
A construção histórica do conceito de força.
Dinâmica de uma partícula
Aristóteles (384 a.c. - 322 a.c.)
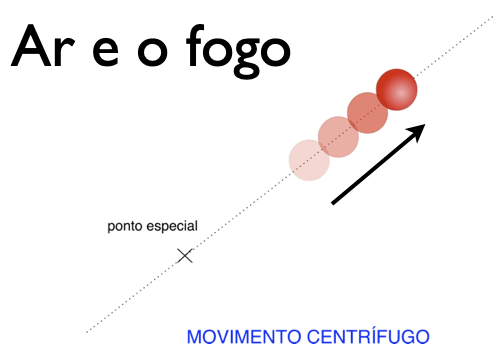
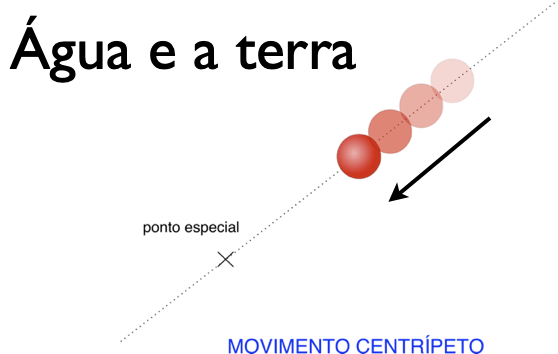
O espaço era todo feito de regiões idênticas, exceto por um único ponto especial e singular:
O centro da Terra seria o centro do universo.
Movimento retilíneo nas proximidades da Terra e entre a Terra e a Lua.
Fonte: Wikipedia
Cortesia: Prof. André Bessa
Dinâmica de uma partícula
Aristóteles (384 a.c. - 322 a.c.)
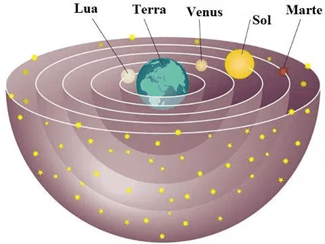
Os planetas e estrelas se moviam nas suas trajetórias circulares em torno da Terra.
O movimento natural seria o círculo.
As leis naturais que regem o movimento dos corpos celestes eram distintas daquelas que regem o movimento dos corpos terrestres.
Todos os outros movimentos seriam não naturais ou forçados.
Fonte: Wikipedia
Fonte: UFMG
Pensava-se que uma força sempre presente era necessária para manter um objeto em movimento com velocidade constante.
Dinâmica de uma partícula
Galileu (1564 - 1642)
O método empírico levou às leis dos movimentos dos corpos próximos à superfície da Terra:
No movimento acelerado a distância percorrida é proporcional ao tempo ao quadrado;
A análise do movimento depende do observador.
Na ausência de interações o movimento natural das partículas é o repouso ou o movimento retilíneo uniforme.
Galileu não estendeu tais conclusões aos corpos celestes, que para ele poderiam permanecer em movimento circular sem a necessidade de qualquer força.
Fonte: Wikipedia
Dinâmica de uma partícula
Aristóteles
Há movimento enquanto existirem forças.
Galileu
Há movimento mesmo quando não existirem forças.
Fonte: Wikipedia
Fonte: Wikipedia
Senso comum
Método científico
Dinâmica de uma partícula
As transformações de Galileu
O movimento é relativo. Depende do observador.
As transformações de Galileu, são aquelas onde V = constante.
A velocidade do objeto nunca se alteraria e sua aceleração seria nula nesses sistemas de referência.
A aceleração de um corpo é um invariante para todos os sistemas de referência que se encontram em movimento de translação relativo uniforme.
Dinâmica de uma partícula
Referencial inercial
A aceleração de um corpo é um invariante nos referênciais inerciais.
Quando os referenciais são inerciais o estudo dos fenômenos é facilitado.
Todos os observadores nesses referenciais medirão a mesma aceleração.
Se eles pretendem fazer medidas provavelmente escolherão a medida da aceleração. Ela é a mesma seja qual for o referencial inercial.
Dinâmica de uma partícula
Referencial inercial
Qualquer referencial fixo em relação às estrelas fixas
é um referencial inercial.
As estrelas fixas são referenciais inerciais
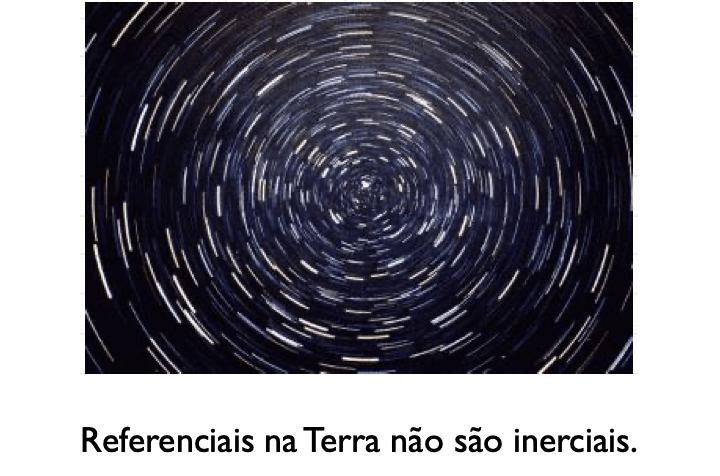
Após uma observação de 24 h
o referencial na Terra
pode não ser
considerado
inercial para determinados
experimentos.
Uma forma operacional para classificar
referenciais inerciais na Terra
Fonte: Prof. Farina. UFRJ/CEDERJFonte: Prof. Farina. UFRJ/CEDERJDinâmica de uma partícula
Referencial inercial
O movimento é de translação, pois nos movimentos curvos há acelerações.
Os observadores em diferentes referenciais inerciais relacionam suas observações por meio das transformações de Galileu.
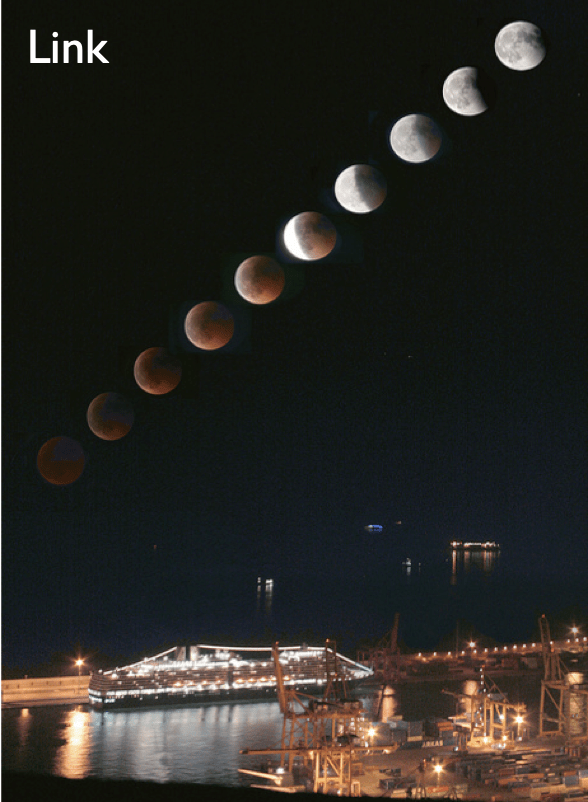
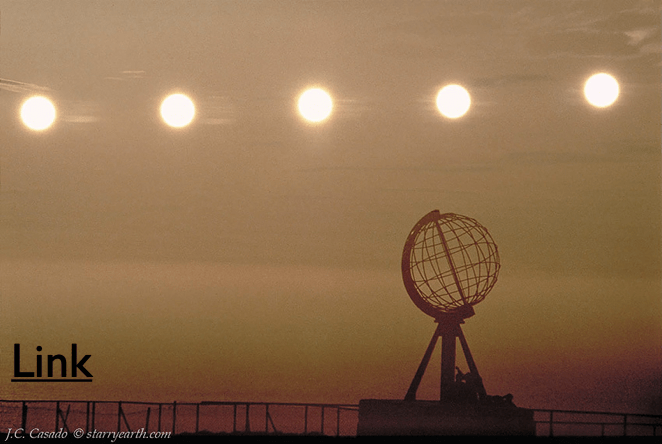
LINK: www.twanight.orgDinâmica de uma partícula
Tycho Brahe (1546-1601)
Dedicou parte da sua vida a medir diariamente a posição dos cinco planetas visíveis a olho nu em relação às estrelas fixas.
Johannes Kepler (1571-1630)
Dedicou grande esforço à análise dos dados de Brahe, formulou as leis cinemáticas que regem os movimentos dos planetas.
As três leis de Kepler
Fonte: WikipediaFonte: WikipediaÓrbitas elípticas, lei das áreas e a lei dos períodos
Dinâmica de uma partícula
René Descartes (1596-1650)
As leis dos céus teriam de ser as mesmas leis da terra.
Os princípios físicos deveriam explicar o comportamento de todo o Universo, não apenas no que se refere ao movimento, mas no âmbito de todos os fenômenos naturais.
Generalizou a descoberta de Galileu para concluir que para um referencial inercial com movimetno relativo constante qualquer corpo deveria permanecer em repouso ou em movimento retilíneo uniforme.
Alguma força teria de atuar para que os planetas e a Terra realizassem suas órbitas em torno do Sol.
Aí está a semente da lei da gravitação.
Fonte: Wikipedia
Dinâmica de uma partícula
Isaac Newton (1642-1727)
Enxergou longe porque se apoiou nos ombros de gigantes.
Enunciou os “axiomas ou leis do movimento”, sobre os quais repousa toda a mecânica newtoniana ou mecânica clássica.
Talvez o grande mérito de Newton não tenha sido o enunciado destes três axiomas, mas as suas aplicação a quaisquer corpos estejam eles nas proximidades da Terra ou no Universo.
Levou as observações empíricas de Galileu dos movimentos próximos a superfície da Terra para o Universo se utilizando dos dados de Kepler dos movimentos dos planetas e muito provavelmente as ideias de René Descartes sobre a universalidade das leis.
Fonte: Wikipedia
Dinâmica de uma partícula
As leis de Newton
Todo corpo continua em seu estado de repouso ou de movimento uniforme em uma linha reta, a menos que seja forçado a mudar aquele estado por forças imprimidas sobre ele.
A mudança de movimento é proporcional à força motora imprimida, e é produzida na direção da linha reta na qual aquela força é imprimida.
A toda ação há sempre oposta uma reação igual, ou, as ações mútuas de dois corpos, um sobre o outro, são sempre iguais e dirigidas a partes opostas.
Todo corpo continua em seu estado de repouso ou de movimento uniforme em uma linha reta, a menos que seja forçado a mudar aquele estado por forças imprimidas sobre ele.
Corpus omne perseverare in statu suo quiscendi vel movendi uniformiter in directum, nisi quatenus illud a viribus impressis cogitur statum suum mutare.
Fonte: https://cardinalnews.orgNewton, o que é força ?
Newton, o movimento em relação a ... ?
A primeira lei de Newton nos fornece um critério para determinar se um referencial é um referencial inercial.
Dinâmica de uma partícula
A primeira lei de Newton. A lei da inércia.
Para uma partícula livre (isolada) é nula a aceleração em relação ao referencial inercial.
Existe uma classe de referenciais inerciais, ou seja, referenciais nos quais vale a lei da inércia e também as outras leis de Newton.
Tais referenciais estariam em repouso ou em movimento retilíneo uniforme.
O referencial é inercial.
Todo corpo continua em seu estado de repouso ou de movimento uniforme em uma linha reta, a menos que seja forçado a mudar aquele estado por forças imprimidas sobre ele.
A estação espacial internacional está girando em órbita, mas o evento ocorre num intervalo tal que a estação é considerada um referencial inercial.
A primeira lei de Newton. Os quadros de referenciais inerciais.
A primeira lei de Newton. A lei da inércia.
A mudança de movimento é proporcional à força motora imprimida, e é produzida na direção da linha reta na qual aquela força é imprimida.
Mutationem motus proportionalem esse vi motrici impressa, fieri secundum lineam rectam qua vis illa imprimitur
A mudança de movimento é proporcional à força motora imprimida, e é produzida na direção da linha reta na qual aquela força é imprimida.
Se há aceleração, então, a partícula não é livre.
Observa-se experimentalmente:
A força tem a direção da linha reta entre as partículas.
A força é proporcional à aceleração.
Se há aceleração existe uma interação de uma partícula com outra.
O movimento que não é natural é forçado.
Dinâmica de uma partícula
A segunda lei de Newton. A relação entre força e aceleração.
As interações ocorrem entre um par de objetos.
As interações fazem os objetos acelerarem (variação da velocidade no tempo).
Dinâmica de uma partícula
A segunda lei de Newton. A relação entre força e aceleração.
As acelerações são iguais?
As forças são iguais?
No laboratório precisamos de um trilho de ar para isolar os carrinhos e avaliar as forças.
A colisão faz:
O carro 1 sai do repouso.
O carro 2 entra em repouso.
Antes a velocidade é nula. Depois é constante.
Antes a velocidade é constante. Após é nula.
Movimento natural
Movimento forçado
Fonte: http://www.iwant2study.org
Carro 1
Carro 2
Dinâmica de uma partícula
A segunda lei de Newton. A relação entre força e aceleração.
Dinâmica de uma partícula
A segunda lei de Newton. A relação entre força e aceleração.
Para avaliar as acelerações e as forças basta arremessar objetos uns contra os outros.
Mas é importante que o sistema esteja isolado.
Dinâmica de uma partícula
A segunda lei de Newton. A relação entre força e aceleração.
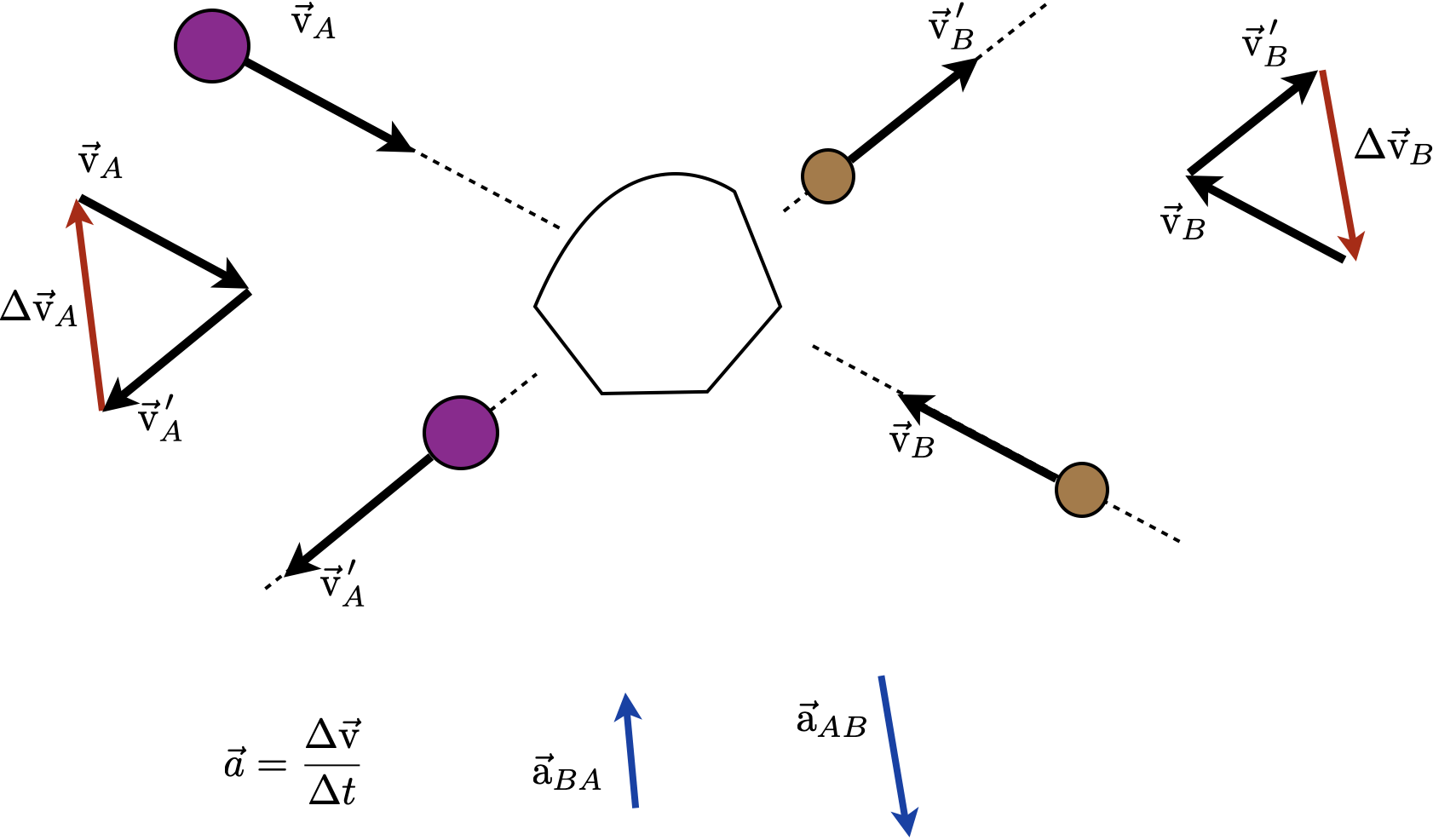
Em um referencial inercial, o movimento forçado é aquele ...
Em que a influência que uma partícula A sofre de um corpo B se manifesta pelo fato do corpo A sair do MRU.
Deve haver uma variação do vetor velocidade.
Os vetores acelerações são iguais?
Dinâmica de uma partícula
A segunda lei de Newton. A relação entre força e aceleração.
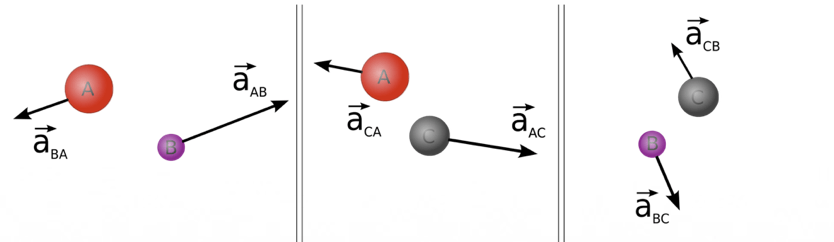
Verifica-se experimentalmente que para um sistema de duas partículas isoladas:
As acelerações são proporcionais entre si:
As acelerações têm mesma direção e sentidos opostos:
As constantes de proporcionalidades dependem apenas das partículas interagentes, independem do movimento das partículas e são positivas:
Dinâmica de uma partícula
A segunda lei de Newton. A relação entre força e aceleração.
Chama-se a constante de proporcionalidade de massa inercial.
Recuperando o sinal obtido a partir da observação experimental:
Adotando a partícula C como padrão (\(m_{C} = 1\)):
Dinâmica de uma partícula
A segunda lei de Newton. A relação entre força e aceleração.
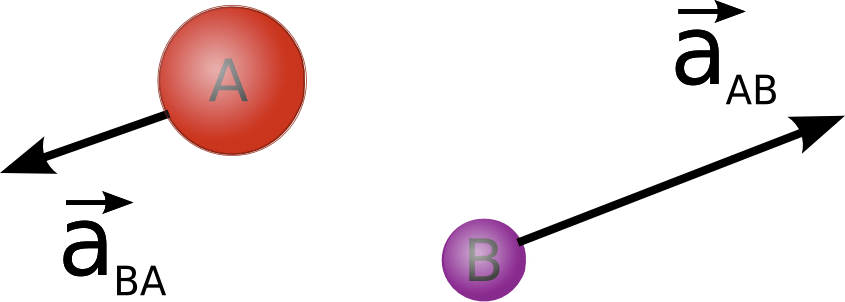
Num par isolado, a partícula com maior massa terá a menor aceleração.
a partícula com menor massa terá a maior aceleração.
Dinâmica de uma partícula
A segunda lei de Newton. A relação entre força e aceleração.
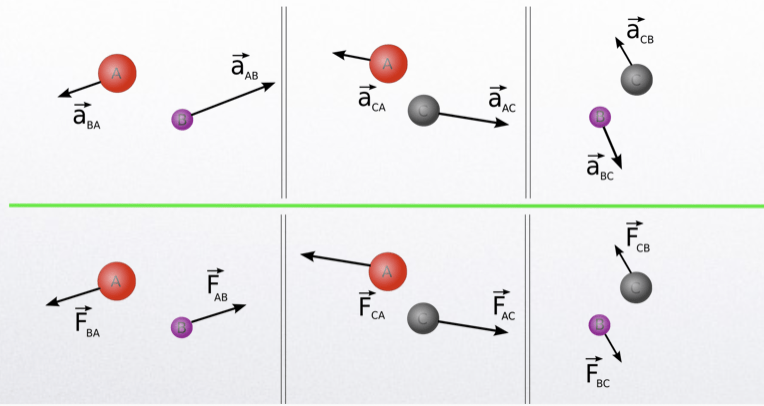
Dada a relação entre massas inerciais e acelerações de um par de partículas:
As acelerações têm módulos diferentes.
Chama-se a quantidade abaixo de força.
Mas forças têm módulos iguais.
É melhor utilizar as forças para estudar o movimento.
Fonte: https://svgsilh.com/
A mudança de movimento (aceleração) é proporcional à força motora imprimida, e é produzida na direção da linha reta (direção da força) na qual aquela força é imprimida.
Dinâmica de uma partícula
A segunda lei de Newton. A relação entre força e aceleração.
A constante de proporcionalidade é a massa inercial. Quanto maior a inércia menor a aceleração para uma mesma força aplicada.
A toda ação há sempre oposta uma reação igual, ou, as ações mútuas de dois corpos, um sobre o outro, são sempre iguais e dirigidas a partes opostas.
Actioni contrariam semper & aqualem esse reactionem: sive corporum duorum actiones in se mutuo semper esse aquales & in partes contraria dirigi.
Dinâmica de uma partícula
A terceira lei de Newton.
A cada reação corresponde uma reação de mesmo módulo, direção e sentido oposto.
Se \(\vec F_{AB}\) é a força sobre a partícula B exercida pela partícula A e \(\vec F_{BA}\) é a força sobre a partícula A exercida pela partícula B, então
Num par isolado:
as forças sobre cada partícula têm o mesmo módulo, direção e sentidos contrários;
a aceleração do sistema é nula;
a ação e a reação não atuam na mesma partícula.
Se você empurrar uma caixa pelo chão, a caixa empurra você com uma força de igual magnitude, na mesma direção e no sentido oposto.
Pode um objeto inanimado, como uma caixa, exercer uma força e, se sim, como sabemos que essa força existe? SIM. PODE, pois o objeto se deforma e deformações estão associadas à forças!
A Terceira Lei de Newton
ATENÇÃO. Note que você aplica a força na caixa. A caixa aplica um força em você.
ATENÇÃO. O par de interação atua em objetos diferentes!
Fonte: https://svgsilh.com/
Sempre que dois objetos interagem, exercem sobre si forças iguais em magnitude e direção, mas opostas em sentido.
A força que Konishiki Yasokichi (b.1963) exerce sobre o menino é a mesma força que o menino exerce sobre Konishiki Yasokichi.
Fonte: https://hipwallpaper.com
A terceira lei de Newton
Como o menino tem a menor inércia ele terá a maior aceleração.
O par de ação e reação são forças internas e se cancelam dentro do sistema. Assim, elas não são capazes de alterar o movimento do centro de massa sistema.
A Terceira Lei de Newton
Hoje, intuitivamente sabemos que...
Força se deve a uma interação
o movimento é alterado pela ação do que costumamos chamar de forças.
Exercendo forças somos capazes de colocar objetos em movimento ou mesmo deformá-los.
Quais são os efeitos das forças?
Quais os tipos de forças?
Por que é importante o estudo das forças?
O que é força? E seus efeitos?
Força se deve a uma interação
Por enquanto, uma força é um empurrão ou um puxão.
Uma força representa uma ação sobre um objeto
Força é uma interação.
Força é exercida sobre um objeto.
Uma força requer um agente.
que altera o movimento e/ou altera a forma.
Força se deve a uma interação
Você pode conseguir diferentes efeitos no movimento do objeto se uma força tem intensidade, direção e sentido distintos.
Força é uma grandeza vetorial.
O que é força? E seus efeitos?
É uma manifestação de interações entre um sistema de objetos.
É uma grandeza vetorial.
O efeito da força depende de como ela é aplicada. Isso é uma propriedade de grandezas vetoriais.
Força se deve a uma interação
O que é força? E seus efeitos?
Gerou uma translação
Gerou uma rotaçao
Como partícula não tem extensão, a força só vai fazê-la transladar.
As interações podem ser repulsivas.
Os corpos com interação atrativa aceleram um em direção ao outro.
Os corpos com interação repulsiva aceleram para longe um do outro.
Entre as massas
Entre os pólos iguais de um ímã
Atractive gravitational force
Fonte: www.gifer.com
Fonte: https://gfycat.com
Força se deve a uma interação
Quais são os tipos de forças?
As forças podem ser atrativas e repulsivas.
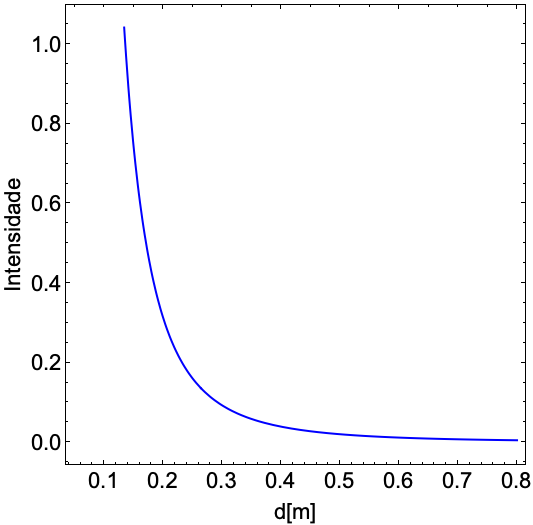
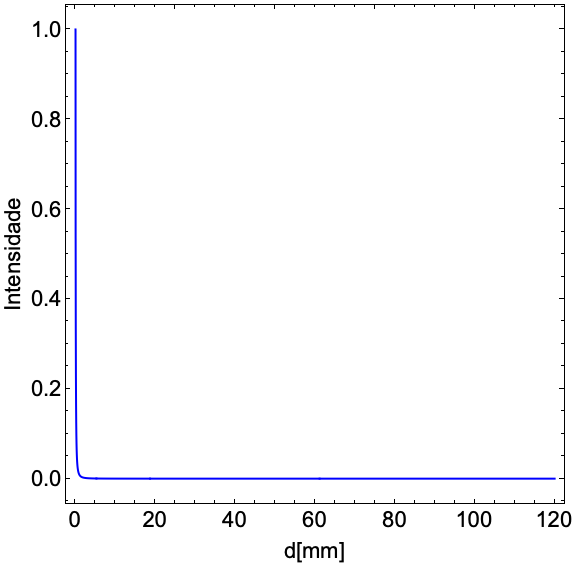
Em qualquer caso a interação é uma função da distância que separa os objetos.
Para ímãs a interação é de longo alcance.
Para bolas de bilhar a interação é de curto alcance.
Fonte: www.pixbay.com
Fonte: www.pixbay.com
Força se deve a uma interação
As forças podem ser de longo alcance ou de curto alcance.
Quais são os tipos de forças?
Forças de campo são forças associadas ao que é chamado de “ação à distância”. Nesse caso, os objetos que exercem forças um no outro não precisam estar fisicamente se tocando. Para qualquer objeto maior que átomos, as forças gravitacional (G) e eletromagnética (E) são forças de campo.
Gravitacional
Eletromagnética
Força se deve a uma interação
Forças de longo alcance ou ação à distância
CAMPO NÃO É FORÇA
A interação de longo alcance é modelada via o conceito de campo que contém informações sobre todo o histórico do objeto.
Os objetos são cercados por um campo, cujas propriedades são determinadas pelos atributos do objeto.
Um objeto eletricamente carregado gera um campo elétrico.
Um objeto magnético gera um campo magnético.
Um objeto com massa gera um campo gravitacional.
Fonte: www.gifer.com
Fonte: https://futurism.com/
Força se deve a uma interação
Forças de longo alcance ou ação à distância
CAMPO NÃO É FORÇA
Forças de contato (c) são forças que surgem quando os objetos se tocam fisicamente. Essa categoria de forças inclui forças devido a tensões, compressões, atrito.
As interações de contato são interações de natureza elétrica!!!
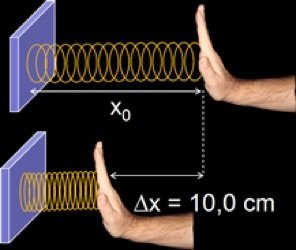
Tensões e Compressões
Empurrando ou puxando um objeto extenso esse pode deformar-se temporariamente, permanentemente ou mesmo romper-se: molas, cordas, fios, barras e superfícies.
Atrito
Interação entre duas superfícies em contato: caixa e piso; blocos e planos inclinados.
Força se deve a uma interação
Forças de curta alcance ou contato
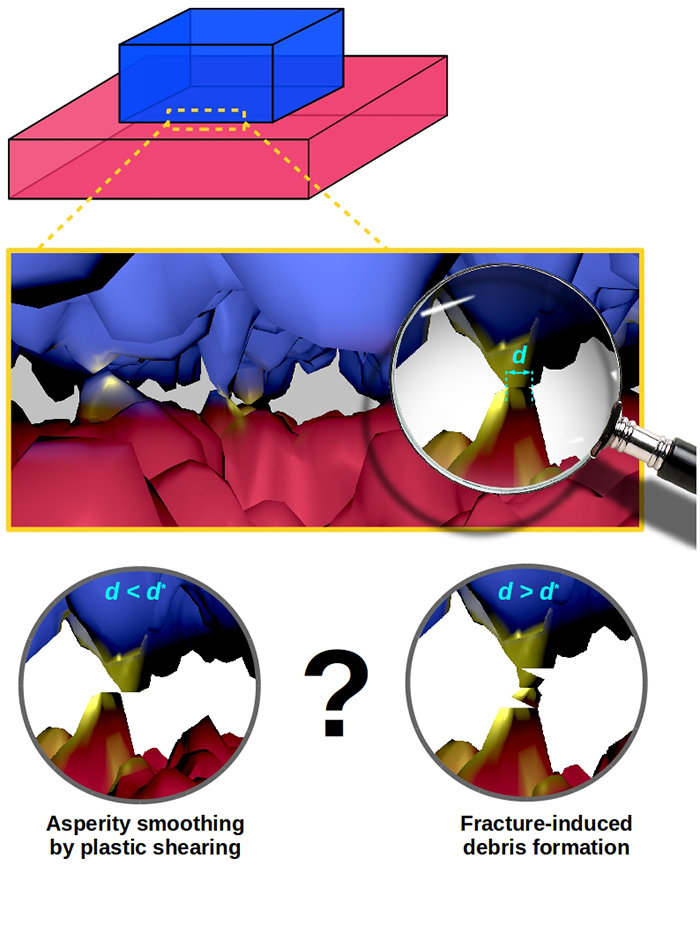
No nível macroscópico, o contato físico significa exatamente isso: duas superfícies se tocando.
No nível atômico, no entanto, dois átomos se atraem ou se repelem, mesmo quando separados por distâncias várias vezes o seu tamanho.
Não existe o "toque" no nível atômico e, portanto, não existe o contato físico.
Seus pés são sustentados por inúmeras interações entre os átomos dos pés e os que estão no chão.
No nível atômico, porque os átomos interagem sem contato físico, até os pés "tocando" o chão são realmente uma interação sem contato físico!
Forças de curta alcance ou contato
Força se deve a uma interação
As forças de contato se ajustam à medida que as forças são aplicadas aos objetos.
Um estudo recente determinou que os diamantes podem ser dobrados e esticados elasticamente quando transformados em agulhas ultrafinas. A equipe demonstrou que suas agulhas de diamante em nanoescala podiam flexionar e esticar até 9% sem quebrar e retornar à sua forma original.
O diamante é o material mais resistentes que ocorre naturalmente na Terra.
Se mesmo o diamante se dobra a uma força aplicada o que pensar de superfícies ordinárias: mesas, pisos, fios, cordas, etc.!
Força se deve a uma interação
Forças de curta alcance ou contato
Para um objeto em queda livre perto da superfície da Terra, a única força exercida sobre o objeto é a força gravitacional \(\vec F^g_{To}\) exercida pela Terra sobre o objeto.
A aceleração de queda livre (g) é o campo gravitacional da Terra.
O peso (P) do objeto próximo da superfície da Terra depende da massa gravitacional objeto (m) e do campo gravitacional da terra (g).
Fonte: https://www.pngwing.com
Fonte: http://www.pixbay.com
Força de ação à distância (Força peso)
Interação gravitacional
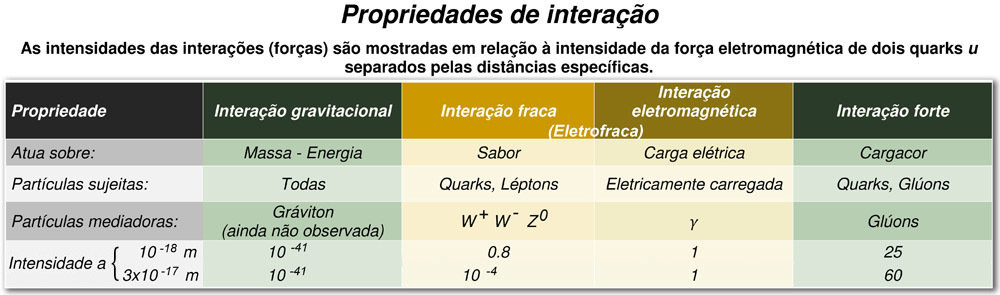
Essa interação de longo alcance se manifesta como uma atração entre todos os objetos que têm massa e é mediada por uma partícula de calibre ainda não detectada, chamada graviton.
É a interação fundamental mais fraca, manifestada pela observação de que você não pode senti-la agindo entre seu corpo e qualquer objeto próximo, embora ambos possuam massa.
A interação gravitacional entre a Terra e seu corpo, por exemplo, é perceptível.
Fonte: http://www.nasa.gov
Interações fundamentais
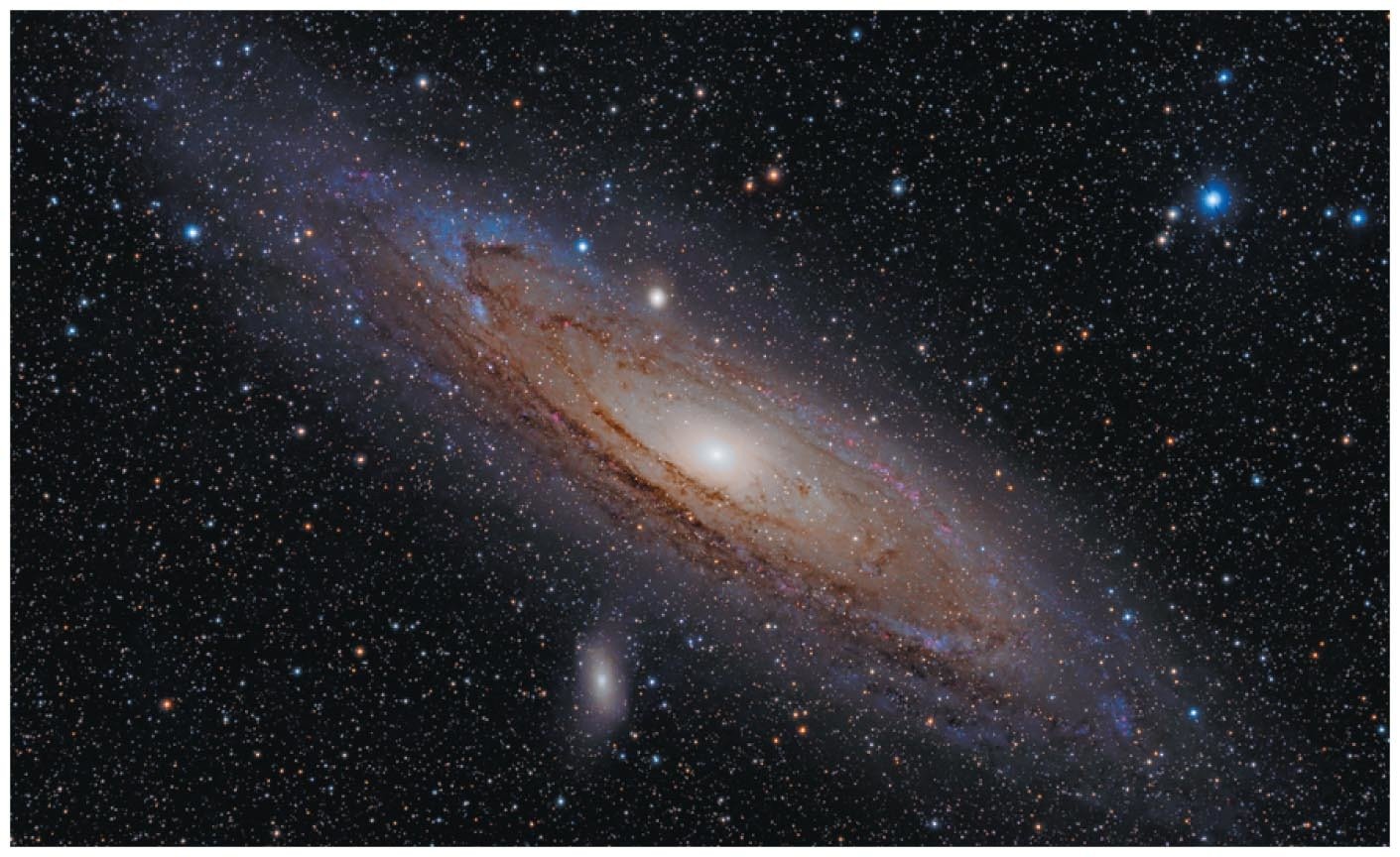
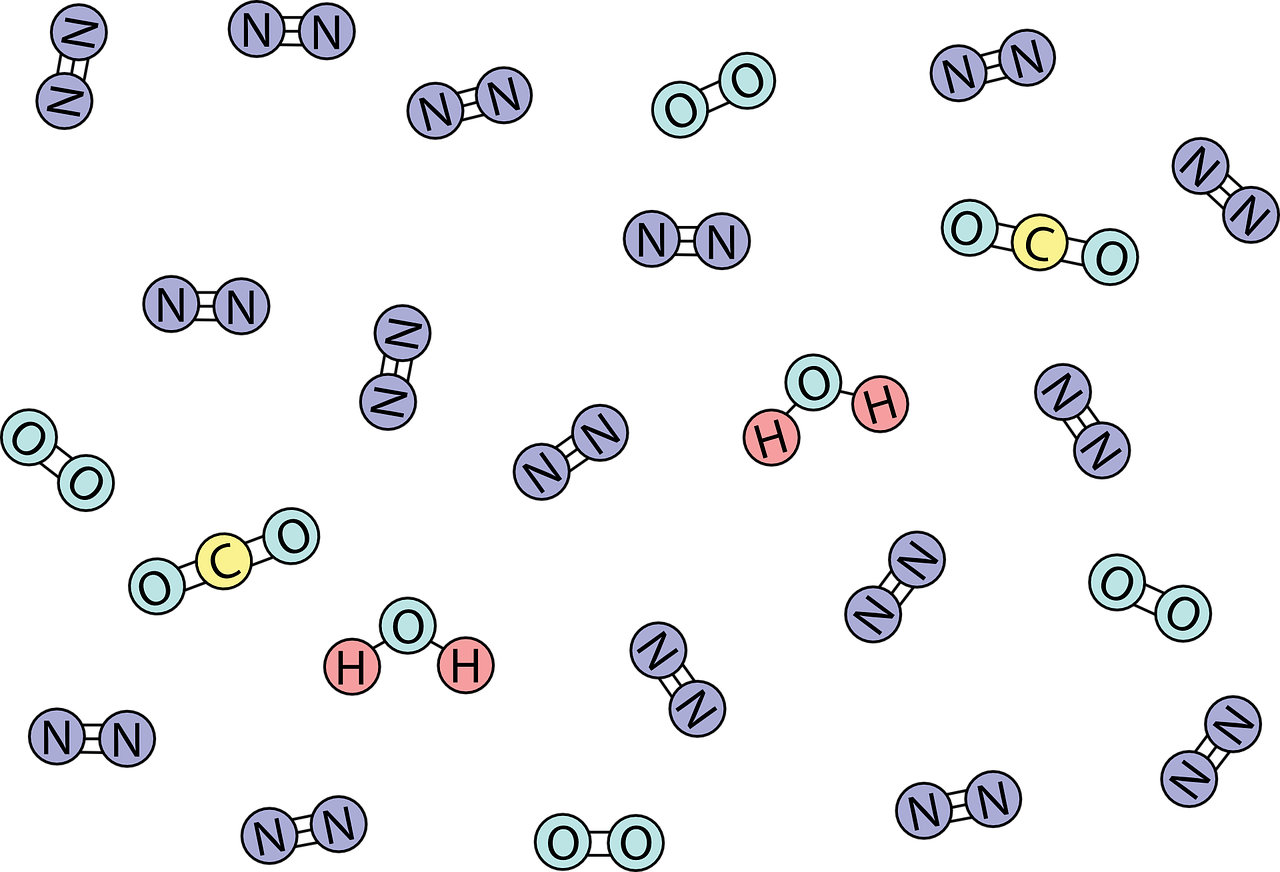
Interação eletromagnética
Essa interação de longo alcance é responsável pela maior parte do que acontece à nossa volta: estrutura de átomos e moléculas, por todos os processos químicos e biológicos, pela coesão da matéria em líquidos e sólidos, pela interação repulsiva entre objetos como um taco e bola, bem como pela luz e outras radiações eletromagnéticas.
O atributo da matéria responsável por essa interação é chamado de carga elétrica, que vem em duas variedades: positiva e negativa (em repouso), cada uma aparecendo em números iguais no universo. Quando em movimento origina magnetismo (pólos sul e norte). A partícula mediadora associada à interação eletromagnética é o fóton.
Fonte: https://gfycat.com
Fonte: www.gifher.com
Interações fundamentais
Interação nuclear fraca (eletrofraca)
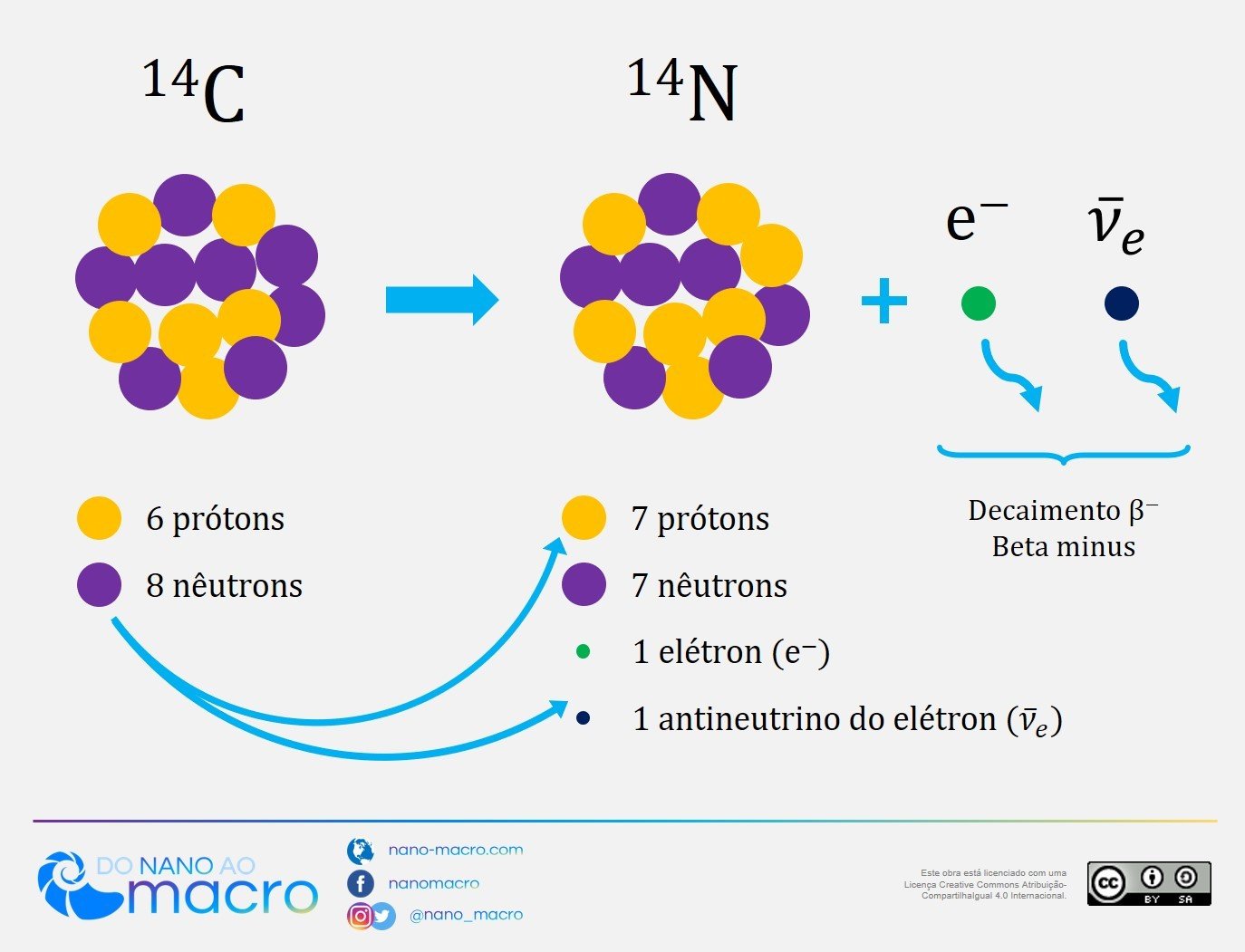
Essa interação repulsiva é responsável por alguns processos nucleares como o decaimento radioativo e pela conversão de hidrogênio em hélio nas estrelas.
Quando a interação fraca faz com que uma partícula subatômica decaia, a energia interna da partícula original é convertida em energia cinética dos produtos da decomposição. Tal como nos átomos a energia química é convertida em energia cinética dos produtos da reação. As interações elétrica/fraca foram unificadas na interação eletrofraca que são mediadas pelos bósons.
Fonte: www.nano-macro.com
Fonte: www.nist.gov
Interações fundamentais
Interação nuclear forte
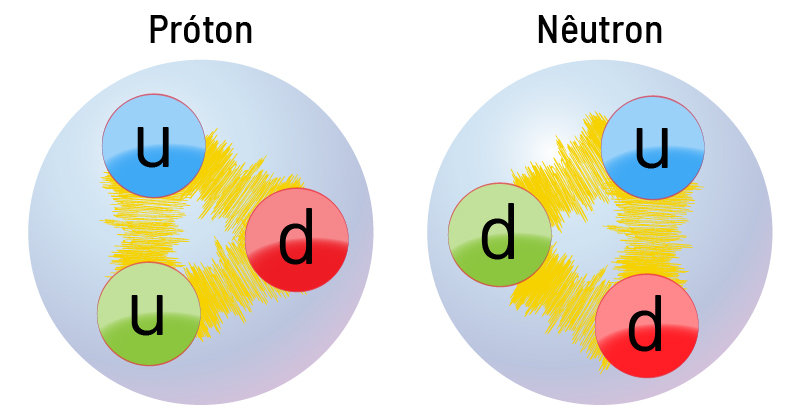
A interação forte atua entre os quarks, que são os blocos de construção de prótons, nêutrons e outras partículas. Essa interação, que pode ser atrativa ou repulsiva, é tão forte que supera completamente todas as outras interações entre partículas. O atributo necessário para essa interação é a carga de cor e as partículas do medidor são chamadas de glúons.
Os quarks sempre se organizam de tal maneira que os efeitos da interação forte sejam cancelados. Somente a uma distância muito curta é que parte da interação forte permanece. Essa interação forte residual é responsável por manter o núcleo de um átomo unido.
Fonte: https://www.sciencenews.org
Interações fundamentais
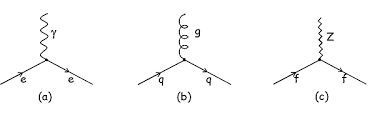
Um modelo alternativo explica interações em termos de uma troca de partículas fundamentais denominadas partículas de calibre (partículas de gauge).
Os físicos mostraram experimentalmente que toda interação é causada pela troca correspondente de partículas mediadoras.
Interações fundamentais
Uma interação é fundamental se não puder ser explicada em termos de outras interações.
Fonte: https://pixabay.com
Fonte: https://pixabay.com/
Fonte: www.cbs.com
carga elétrica
(fóton)
carga cor
(glúon)
carga fraca
(bósons)
Interações fundamentais
Uma interação é fundamental se não puder ser explicada em termos de outras interações.
Todas as interações conhecidas podem ser atribuídas a apenas quatro interações fundamentais, duas delas familiares da vida cotidiana e duas não.
Exemplo 1
Identifique todas as forças (contato e/ou ação à distância) exercidas no objeto em itálico em cada situação:
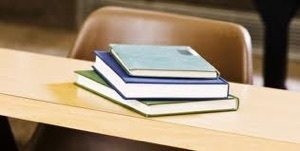
(a) Um livro está deitado em cima de uma revista sobre uma mesa.
(b) Uma bola se move ao longo de uma trajetória pelo ar.
(c) Uma pessoa está sentada em uma cadeira no chão de uma sala.
(d) Um ímã que flutua acima de outro ímã que está sobre uma mesa.
Fonte: https://images.app.goo.glFonte: https://images.app.goo.glFonte: Ronai LisboaSe o livro um estivesse em queda livre ao invés de apoiado no chão, quais as forças sobre ele?
Exemplo 2
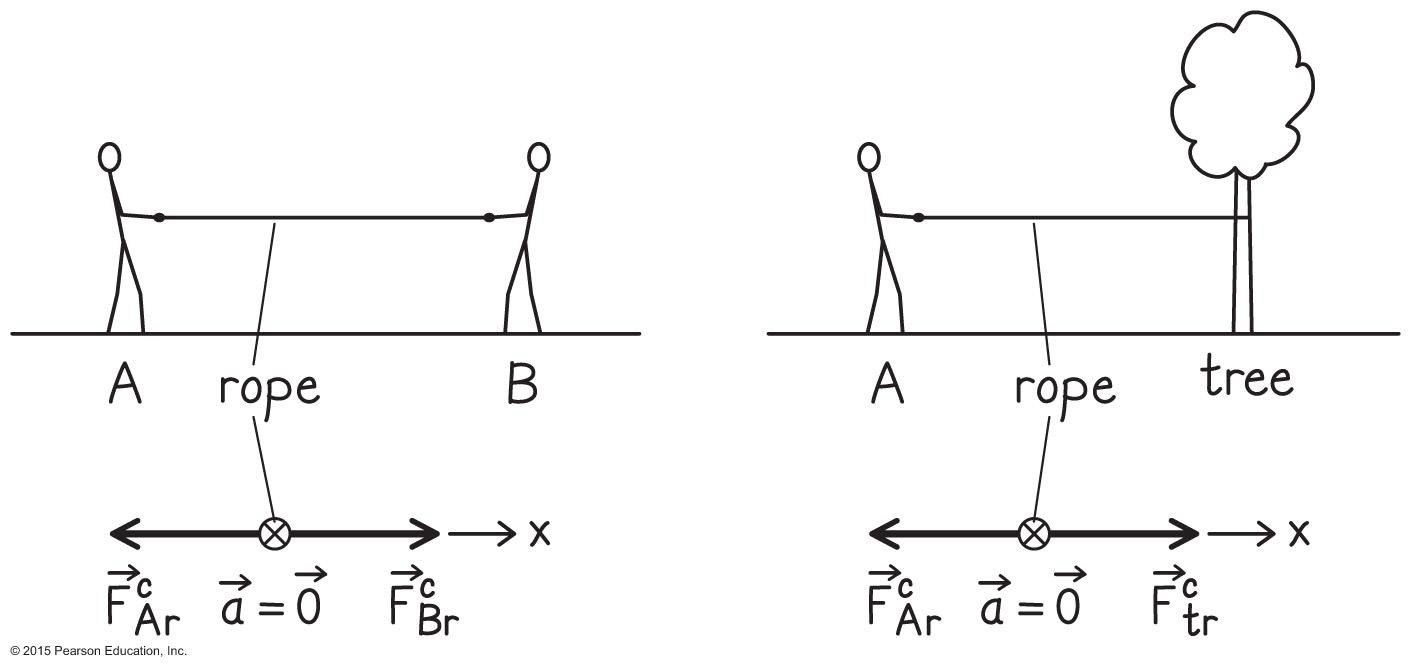
Fonte: https://images.app.goo.gl/Se duas pessoas, A e B, puxam as extremidades opostas de uma corda que está em repouso, cada uma exercendo uma força elástica horizontal de magnitude F, a tensão na corda é T = F. Suponha, em vez disso, que uma extremidade da corda esteja amarrada a uma árvore e A puxe a outra extremidade por ela mesmo com a mesma força de magnitude F. A tensão na corda é maior que, igual ou menor que a tensão quando A e B puxar extremidades opostas?
Como A puxa a corda com uma força de magnitude F, a árvore deve puxar com uma força de magnitude F na direção oposta e, portanto, a tensão na corda é T = F, que é a mesma de quando A e B puxam as extremidades opostas.
Exemplo 3
No Exemplo 3, suponha que as duas pessoas puxem a mesma extremidade da corda, cada uma exercendo uma força F, enquanto a outra extremidade ainda está presa à árvore. A tensão na corda é maior que, igual a ou menor que a tensão quando as duas pessoas puxam em extremidades opostas?
Exemplo 4
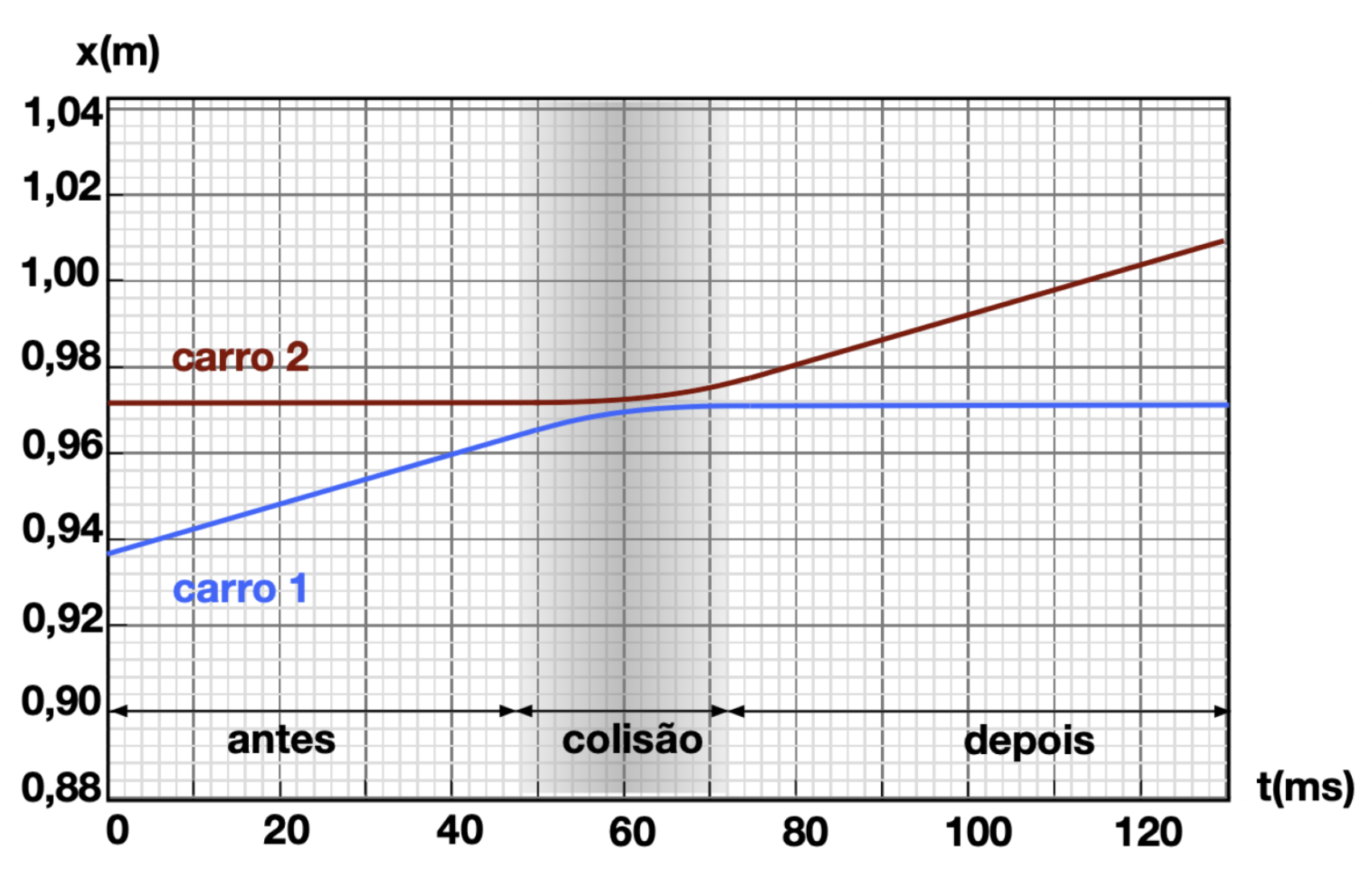
O gráfico abaixo mostra a interação entre dois carrinhos sobre um trilho de ar. Calcule:
(a) As velocidades antes dos carros colidirem.
(b) As velocidades depois dos carros colidirem.
(c) A variação das velocidades de cada carro.
(d) A aceleração de cada carro.
(e) O que você pode dizer a respeito das massas de cada carro?
Exemplo 5
By Ronai Lisboa
Dinâmica. As leis de Newton. O conceito de força. Os tipos de forças. A representação das forças.



