










Ronai Lisboa
Curso de Introdução à Física Clássica: Mecânica, Termodinâmica, Fluidos, Ondas e Oscilações e Eletromagnetismo para Bacharelado em Ciências e Tecnologias.
Objetivos
Aplicar as Leis de Newton em problemas clássicos:
Plano inclinado.
Máquina de Atwood.
Movimento horizontal.
Movimento vertical.
Identificar os tipos de forças exercidas sobre um objeto.
Desenhar o diagrama de corpo livre.
Bibliografia.
Tipler - Cap. 4
Seções 4.6 a 4.8 (pags. 103 a 133)
- Faça os exercícios resolvidos.
O mínimo obrigatório é estudar a referência e a lista de exercícios (veja SIGAA)
Represente o objeto como uma partícula.
Força se deve a uma interação
Objeto
Agente
Localize a cauda do vetor força sobre a partícula.
Desenhe o vetor força como uma seta orientada e de comprimento proporcional à intensidade da força.
Nomeie o vetor força apropriadamente.
O vetor representa a força que a Terra exerce sobre o objeto.
Como representar forças?
(partícula)
(Terra)
Identifique e isole o objeto em análise.
Represente o objeto como uma partícula.
Objeto
Agente 2
Desenhe os vetores forças como uma seta orientada e de comprimentos proporcionais à intensidade de cada força
Denote os vetores apropriadamente.
Represente a soma vetorial dos vetores sobre o objeto.
Agente 1
O vetor resultante vai indicar a direção e sentido do movimento do objeto.
Podemos substituir as duas forças \(\vec F_{1o}\) e \(\vec F_{2o}\) por uma única força \(\vec F_{Ro}\).
Fonte: RandallO princípio de superposição
Força se deve a uma interação
Como representar forças?
A soma vetorial das forças exercidas em um objeto é igual à força resultante sobre o objeto.
A magnitude da aceleração da caixa é:
equivalente
O princípio de superposição
A variação da velocidade da caixa é:
Força se deve a uma interação
Como representar forças?
Observe que cada força ocorre aos pares.
O princípio de superposição permite somar esses pares.
Se suspendermos a mola em um teto e prendermos a massa na parte inferior, a massa alonga a mola que fica em uma posição abaixo do comprimento relaxado da mola.
O massa está sujeito a uma força de gravidade para baixo e uma força de contato para cima - um puxão - exercido pela mola. QUAIS SÃO AS FORÇAS SOBRE A MASSA?
Massa
mola
Terra
teto
A força elástica exercida pela mola (força elástica) é contrária a deformação da mola (\(\Delta x\)).
A força da gravidade exercida sobre a massa é a favor da deformação da mola.
Fonte: Tipler & Mosca
Força elástica (Força de contato)
EQUILÍBRIO
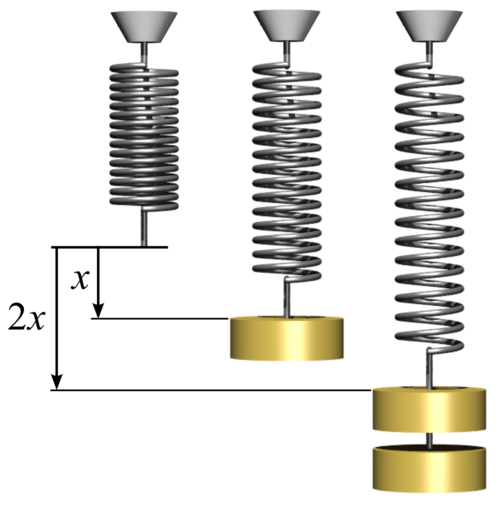
Se você posicionar uma mola na vertical e colocar uma massa em cima dela, a massa comprime a mola e fica em uma posição abaixo do comprimento relaxado da mola.
Massa
mola
Terra
A força elástica exercida pela mola (força elástica) é contrária ao deformação da mola (\(\Delta x\)).
A força da gravidade exercida sobre a massa é a favor da deformação da mola.
O massa está sujeito a uma força de gravidade para baixo e uma força de contato para cima - um empurrão - exercido pela mola. QUAIS SÃO AS FORÇAS SOBRE A MASSA?
Fonte: Tipler & Mosca
Força elástica (Força de contato)
EQUILÍBRIO
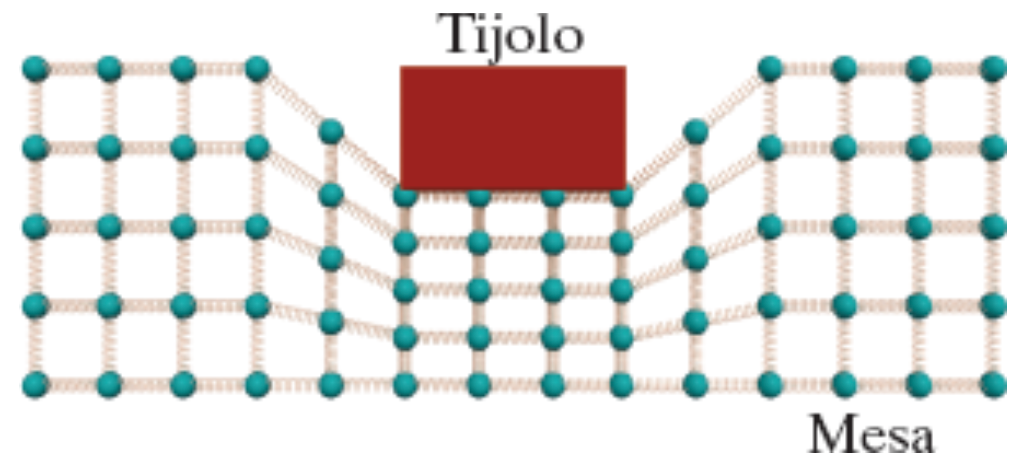
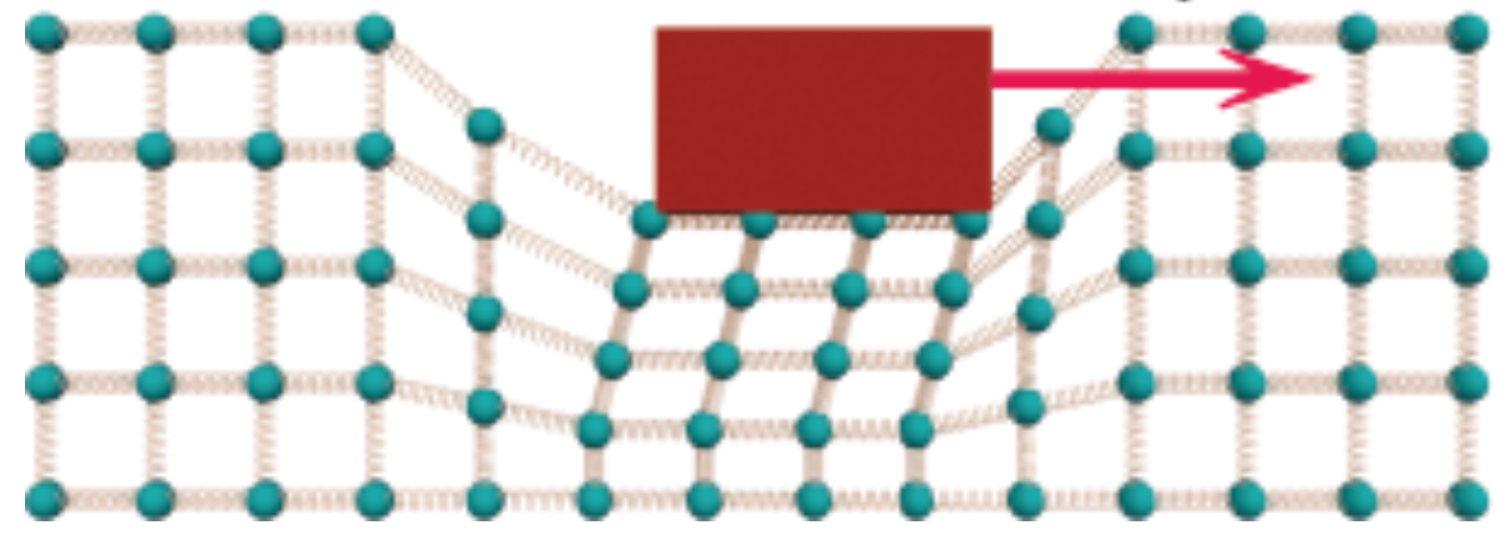
A superfície é comprimida pelo peso do bloco. As ligações interatômicas (entre elétrons) da superfície podem ser modeladas como uma rede de um sistema de molas e massas.
A superfície sofre uma deformação — suas “molas” interatômicas são comprimidas.
Denomina-se a força para cima exercida pela superfície de “força de compressão”, mas a denominação usual para uma força desse tipo é “força normal”, pois ela é perpendicular à superfície e é exercida sobre o bloco.
Fonte: Chabay & Sherwood
Fonte: Chabay & Sherwood
bloco
Normal e Atrito (Forças de contato)
O atrito é um fenômeno que envolve a deformação de objetos e tem natureza interatômica.
Quando você aplica uma força sobre o tijolo \(\vec F_{aplicada}\), ele pressiona os átomos da mesa, comprimindo as ligações interatômicas à sua frente e esticando as que estão atrás (a escala está exagerada).
O efeito resultante dessa deformação nas ligações interatômicas da mesa surge como uma força paralela à superfície e oposta à força aplicada é chamada “força de atrito”.
A deformação das "molas" interatômicas se opõe à força aplicada.
Fonte: Chabay & Sherwood
Fonte: Chabay & Sherwood
Fonte: Chabay & Sherwood
Normal e Atrito (Forças de contato)
A força de contato da mesa sobre o tijolo é uma soma de duas componentes perpendiculares:
A força de compressão (normal) perpendicular à superfície da mesa e a força de deformação paralela à superfície de contato (atrito).
A força de atrito vai se ajustando à força aplicada até que a velocidade do bloco tenha velocidade constante (\(F_{aplicada} = F_{atrito}\)) ou fique acelerado (\(F_{aplicada} \neq F_{atrito}\)).
As forças normal e atrito são componentes de uma força de contato.
Fonte: Chabay & Sherwood
Fonte: Chabay & Sherwood
A força de contato tem sentido contrário 'a resultante das forças aplicadas e gravitacional!
A força de contato tem duas componentes: perpendicular à superfície (normal) e tangente à superfície (atrito)
Forças de contato (Normal e Atrito)
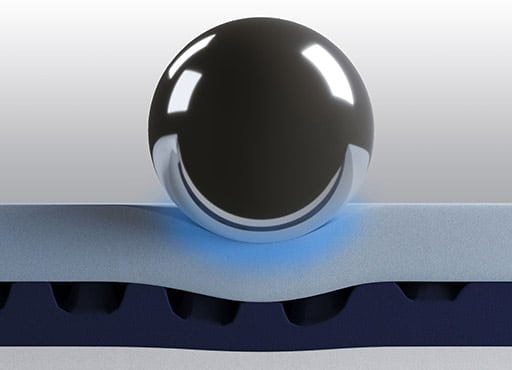
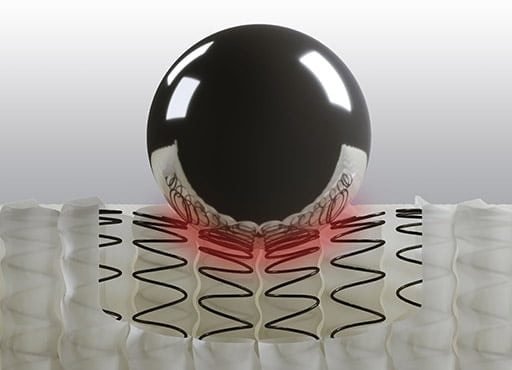
As forças normal e atrito têm natureza elétrica.
As superfícies exercem sobre objetos uma força de contato que equilibra a força aplicada.
A deformação da superfície será maior ou menor dependendo da sua dureza.
Fonte: https://sleepopolis.com
Objetos exercem força, sim! Porque são feitos de átomos!
E as interações entre esses átomos são forças.
Forças normal e peso
A força normal se ajusta para equilibrar a força peso.
A força normal se ajusta para equilibrar a força peso.
Se a força aplicada pela mão superar as interações interatômicas da superfície ela se quebra. Nesse momento:
Forças normal e peso
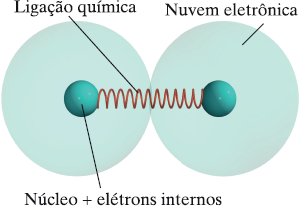
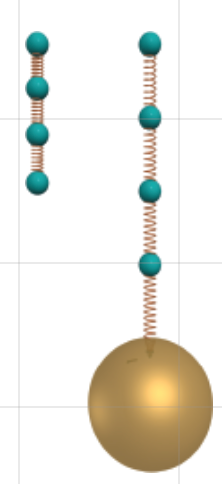
As interações entre os elétrons que compõem o material são responsáveis pelas forças de tensão e tração (funcionam como molas)
Quando um fio suporta um objeto massivo, as ligações entre os elétrons, similares a molas, se alongam bastante, porque cada ligação deve aguentar o peso de tudo que está acima dela.
Terra
bola
fio
Fonte: Charbay & Sherwood
Força tensão/tração
Uma corda é esticada pela massa do bloco. As ligações interatômicas também podem ser modeladas como uma rede de um sistema de molas e massas. Quais são as forças sobre a corda?
A corda sofre uma deformação — suas “molas” interatômicas são alongadas.
Denomina-se a força aplicada para baixo exercida pelo peso de “força de tensão” ou "força de tração".
A força tensão \(T\) tem natureza elétrica!
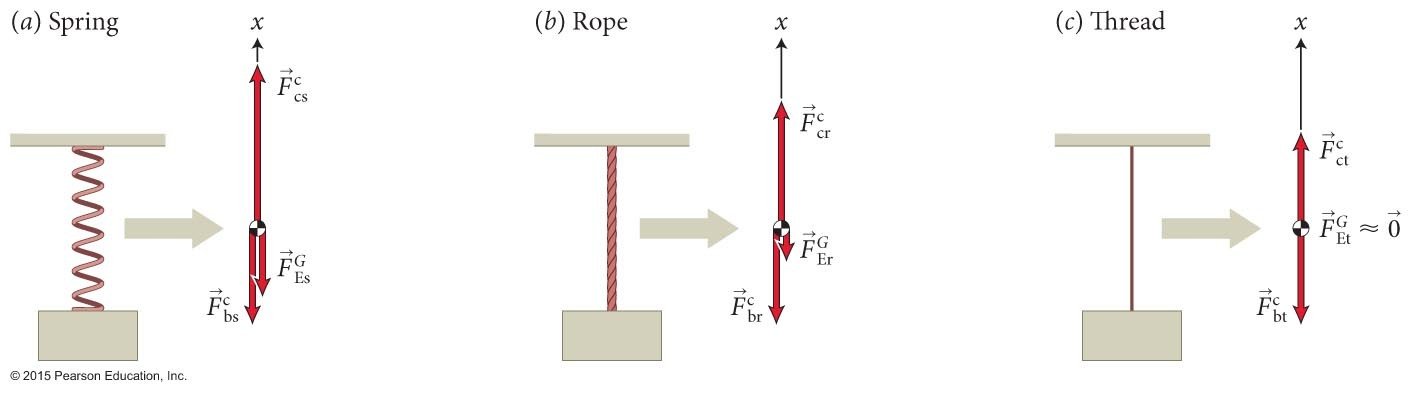
Se a corda é muito fina de modo que sua inércia é muito pequena, a força da gravidade é muito menor do que as forças de contato. Nesse caso idealizado, a corda simplesmente transmite a força de tensão entre suas pontas.
teto
bloco
corda
Fonte: Eric Mazur
Força tensão/tração
Diagrama de corpo livre
Para separar as forças exercidas sobre o objeto devemos usar o diagrama de corpo livre.
piso
livro
terra (planeta)
Quais as forças exercidas sobre o livro?
Essas forças não são um par de interação porque atuam no mesmo objeto e são de naturezas diferentes (campo e contato)!
A força da gravidade e a força de compressão.
Fonte: http://www.pixbay.com
Normal é igual ao peso porque há equilíbrio e a superfície é horizontal.
Diagrama de corpo livre
Para separar as forças exercidas sobre o objeto devemos usar o diagrama de corpo livre.
Quais as forças exercidas sobre a argola?
Essas forças não são um par de interação porque atuam no mesmo objeto e são de naturezas diferentes (campo e contato)!
A força da gravidade e as tensões.
Diagrama de corpo livre
Para separar as forças exercidas sobre o objeto devemos usar o diagrama de corpo livre.
Quais as forças exercidas sobre a mulher?
Essas forças não são um par de interação porque atuam no mesmo objeto e são de naturezas diferentes (campo e contato)!
A força da gravidade e compressão.
Normal não é igual ao peso porque não há equilíbrio.
O livro não se move. A soma vetorial das forças exercidas sobre ele deve ser zero: \(\vec F_{Rl} = \vec 0\)
Quais forças são exercidas no livro?
TERRA
Par de interação
Gravitacional (campo)
Par de interação
Normal (contato)
TERRA
O livro está em repouso porque as duas forças exercidas nele cancelam uma a outra exatamente.
A força da gravidade e a força normal.
Atuam em objetos diferentes:
Atuam em objetos diferentes:
Atuam no mesmo objeto. Não são um par de interação.
Fonte: https://a-casa.colorir.com
Fonte: https://a-casa.colorir.com
Fonte: http://www.pixbay.com
Diagrama de corpo livre: Equilíbrio.
Exemplo 1
Um praticante de skibunda (massa de 72,9 kg, altura de 1,79 m) está descendo uma montanha de areia com um ângulo de 22° em relação à horizontal. (a) Se pudermos desprezar o atrito, qual é sua aceleração? (b) Supondo que tenha partido do repouso, qual a sua velocidade na base da inclinação se a altura da inclinação é de 10 m?
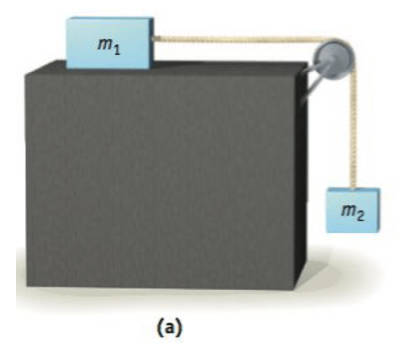
Exemplo 2
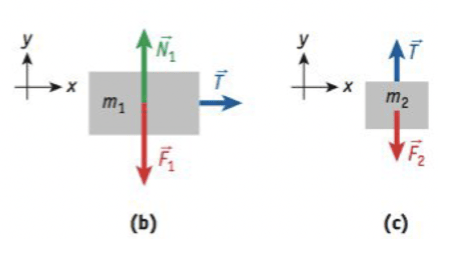
Neste problema clássico, uma massa pendurada gera uma aceleração para uma segunda massa sobre uma superfície horizontal (Figura). Um bloco, de massa \(m_1\), está sobre uma superfície horizontal sem atrito e é conectado por meio de uma corda sem massa (por questão de simplicidade, orientada no sentido horizontal) que passa sobre uma polia sem massa para outro bloco, com massa \(m_2\), pendurada na corda. (a) Qual a aceleração do sistema? (b) Quais as trações? (c) Quanto tempo leva para \(m_2\) tocar o chão se caiu de uma altura igual h e foi solto a partir do repouso?
Fonte: WolfgangExemplo 3
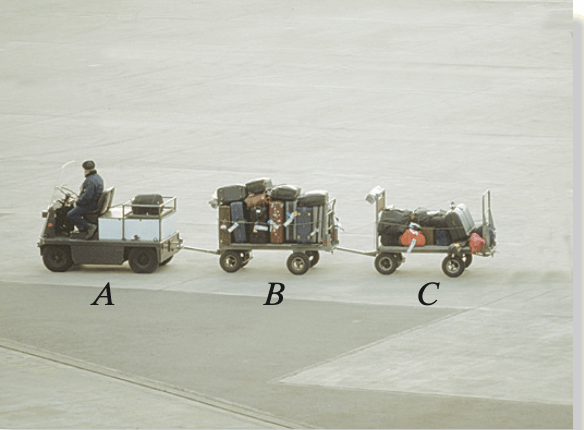
O trator de bagagem A mostrado na fotografia tem massa de 450 kg e reboca a carreta B de 275 kg e a carreta C de 160 kg. Por um curto período de tempo, a força de atrito motora desenvolvida nas rodas do trator é de \(F_A\) = (200t) N, onde t é dado em segundos. (a) Se o trator parte do repouso, determine sua velocidade escalar em 2 segundos. (b) Além disso, qual é a força horizontal atuando sobre o engate entre o trator e a carreta B nesse instante? Despreze a dimensão do trator e das carretas.
Fonte: Hibbeler
Exemplo 4
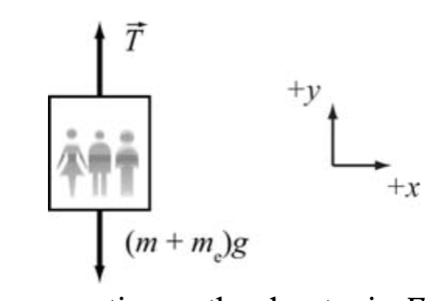
Um elevador tem massa de 358,1 kg, e a massa combinada das pessoas dentro dele é de 169,2 kg. O elevador é puxado para cima por um cabo, com aceleração constante de 4,11 m/s\(^2\). Qual é a tensão no cabo?
Fonte: WolfgangExemplo 5
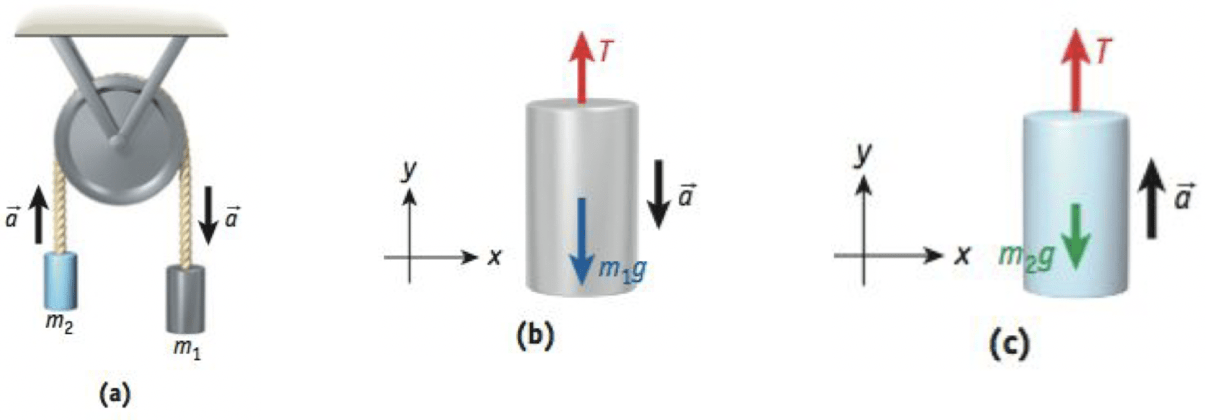
A máquina de Atwood consiste em dois pesos pendurados (com massas \(m_1\) e \(m_2\)) conectados por uma corda que passa por uma polia. Por enquanto, consideramos um caso sem atrito, em que a polia não se move e a corda desliza sobre ela. Também pre- sumimos que \(m_1 > m_2\). Neste caso, a aceleração é conforme mostrada na Figura. (a) Qual a aceleração do sistema? (b) Qual a tensão na corda?
Fonte: WolfgangExemplo 6
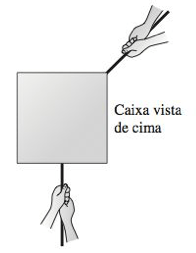
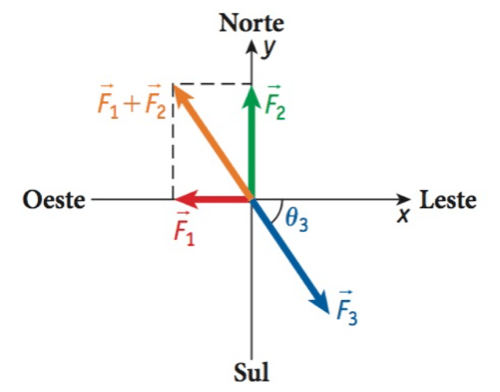
Considerar a situação em que três cordas são amarradas em um ponto comum, com uma equipe puxando cada corda. Suponha que a equipe 1 esteja puxando para o oeste com uma força de 2750 N, e que a equipe 2 esteja puxando para o norte com uma força de 3630 N. Uma terceira equipe pode puxar de tal forma que o cabo de guerra com três equipes termine empatado, ou seja, nenhuma equipe consiga mover a corda? Se sim, qual é o módulo e o sentido da força necessária para realizar isso?
Fonte: WolfgangExemplo 7
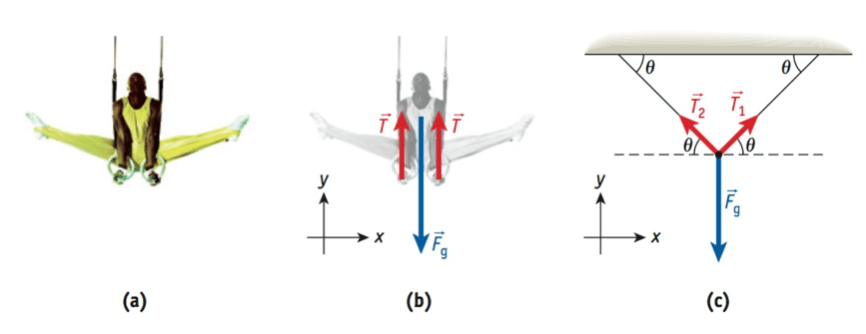
Um ginasta de massa 55 kg está pendurado verticalmente em um par de argolas paralelas. Se as cordas que sustentam as argolas são verticais e presas a teto diretamente acima, qual é a tensão em cada corda?
Fonte: WolfgangFonte: https://images.app.goo.gl/Desenhe um diagrama de corpo livre para a pessoa.
Exemplo 8
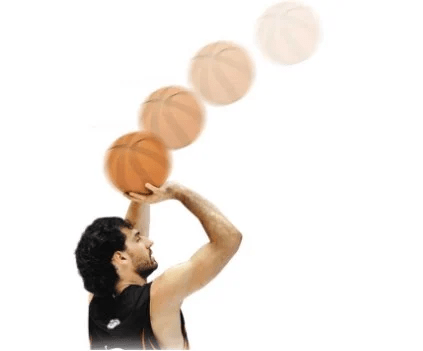
Você joga uma bola para cima. Desenhe um diagrama de corpo livre para a bola
(a) enquanto ela ainda toca sua mão e está acelerando para cima;
(b) no ponto mais alto; e
(c) no caminho de volta para baixo.
Exemplo 9
Fonte: https://images.app.goo.glFonte: https://images.app.goo.glExemplo 10
(a) Na figura a força de contato exercida pela mesa no livro e a força gravitacional exercida pela Terra no livro são um par de interação?
(b) O que impede que o livro caia em queda livre?
TERRA
TERRA
Fonte: https://a-casa.colorir.com
Fonte: http://www.pixbay.com
Exemplo 11
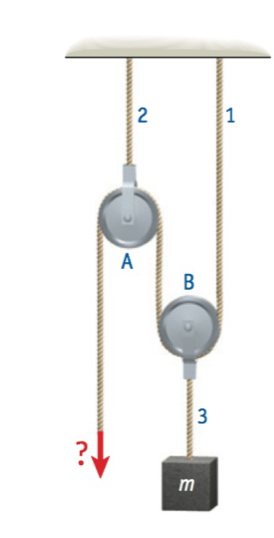
Que força precisamos aplicar à extremidade livre da corda 1 para manter o sistema em equilíbrio estático?
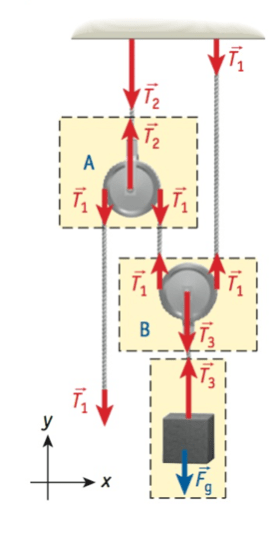
Fonte: WolfgangExemplo 12
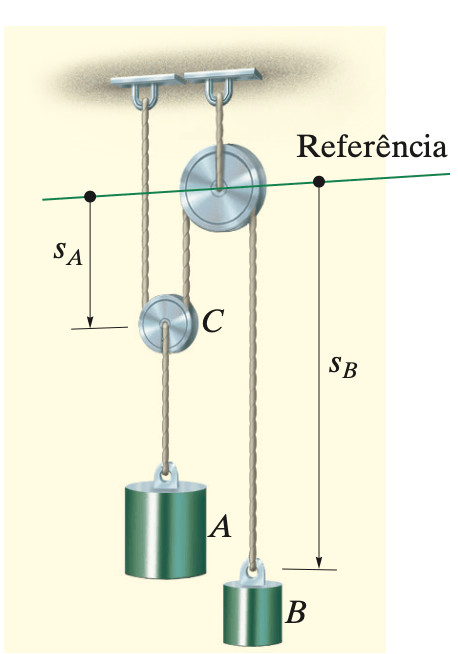
O bloco A de 100 kg mostrado na Figura é solto do repou- so. Se as massas das polias e da corda são desprezadas, determine a velocidade escalar do bloco B de 20 kg em 2 s.
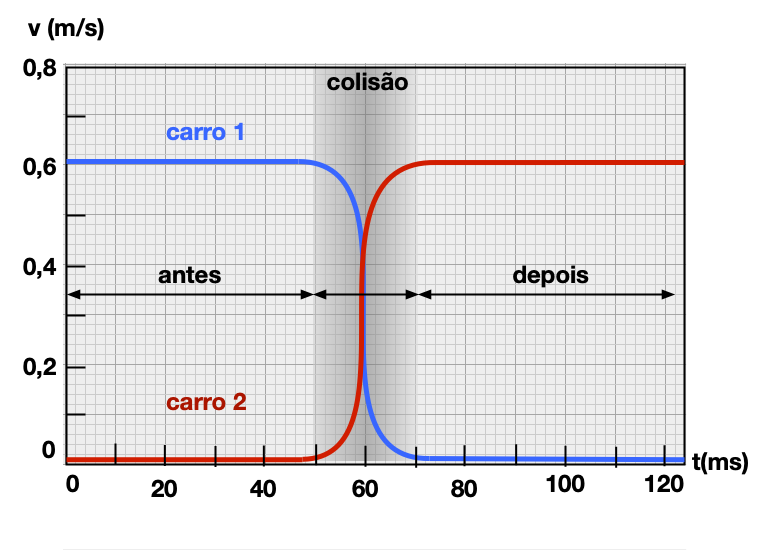
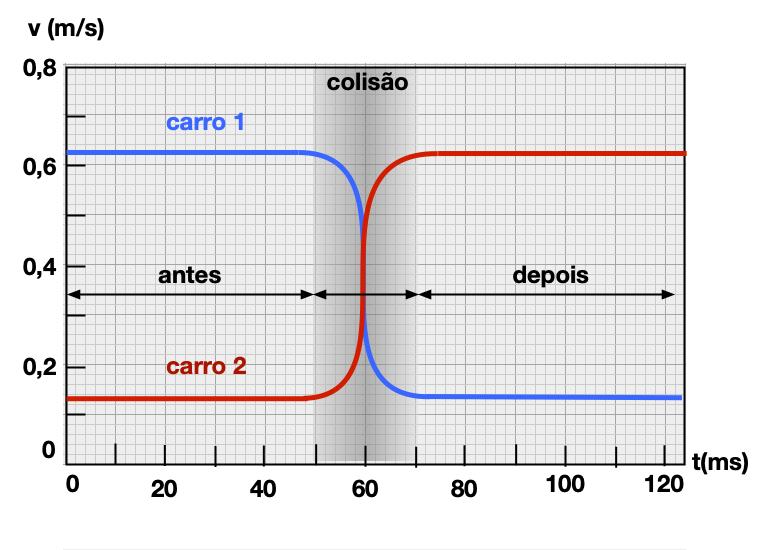
Fonte: HibbelerA partir da colisão entre dos carros padrões é possível construir o gráfico da posição versus o tempo.
Aqui temos uma simulação (idealizada) do que ocorre nos laboratórios de física.
As Leis de Newton
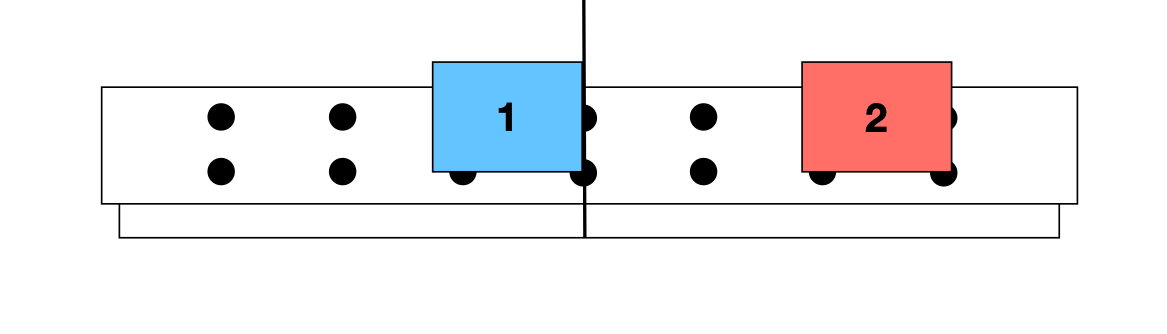
Para dois carros idênticos (padrões) há uma troca de velocidades devido a colisão.
ANTES
DEPOIS
As Leis de Newton
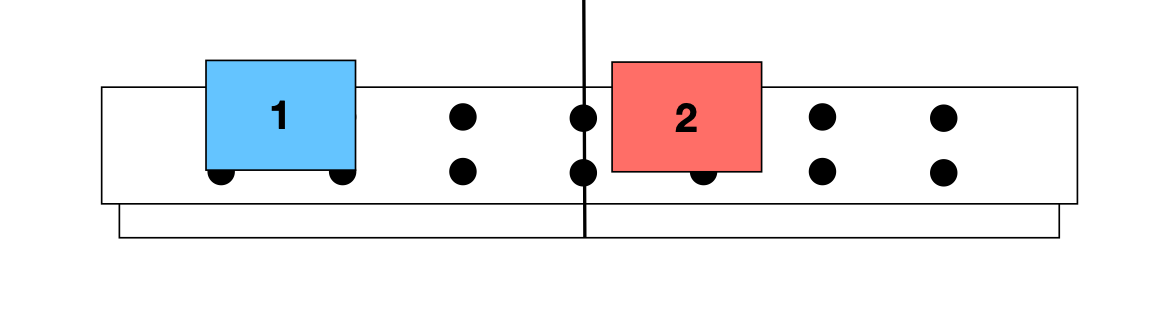
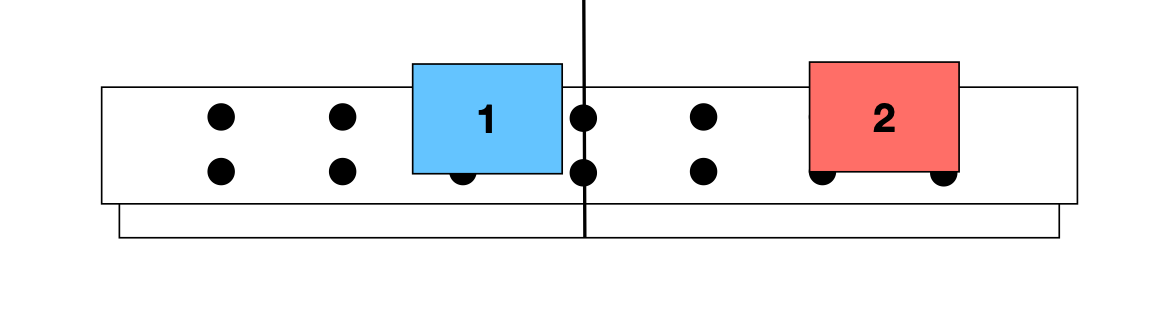
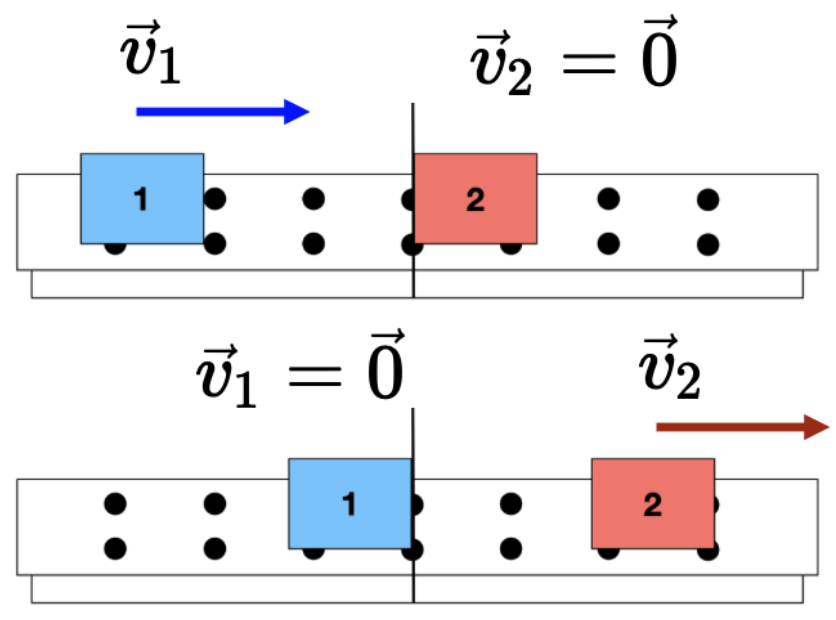
Não importa se um dos carros está em movimento ou em repouso. Há troca de velocidades devido à colisão entre eles.
ANTES
DEPOIS
As Leis de Newton
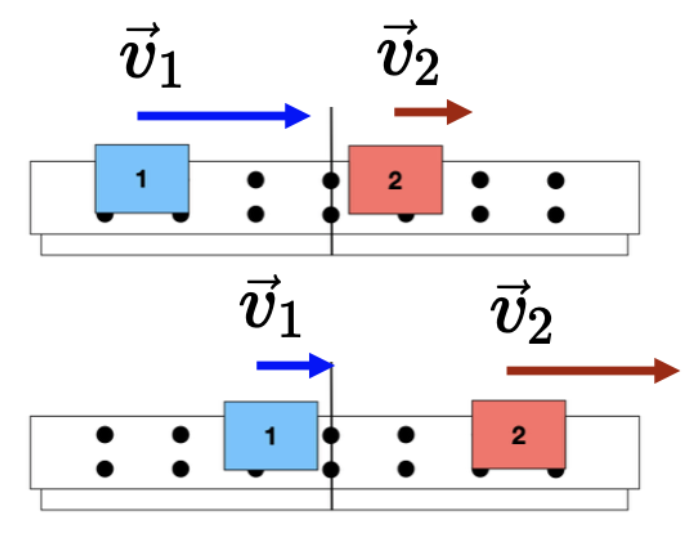
Para dois carros padrões idênticos observamos que:
Caso 1
Caso 2
As Leis de Newton
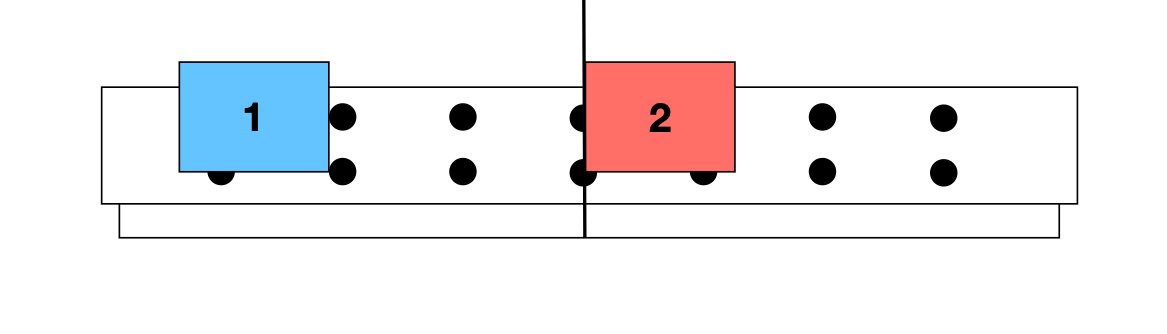
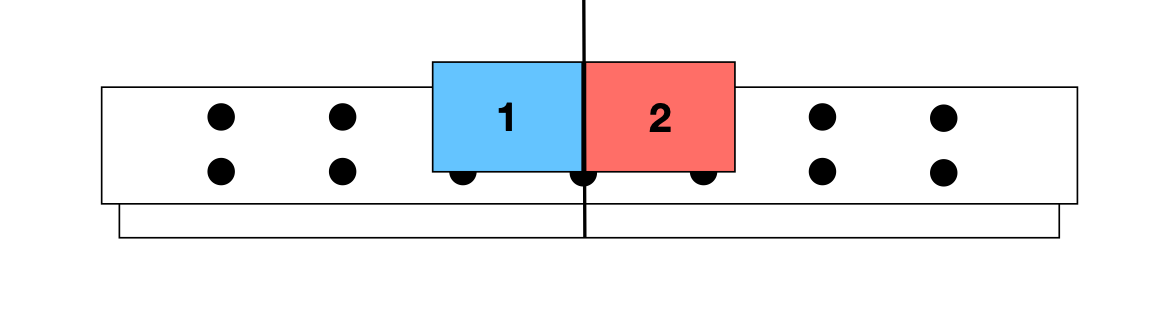
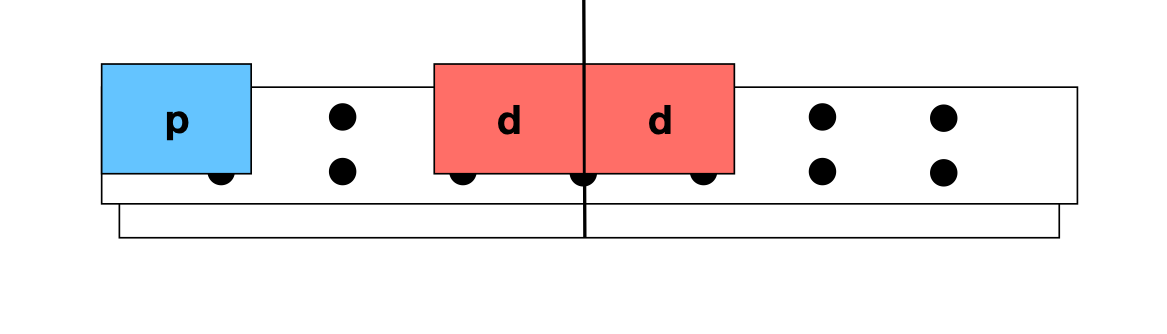
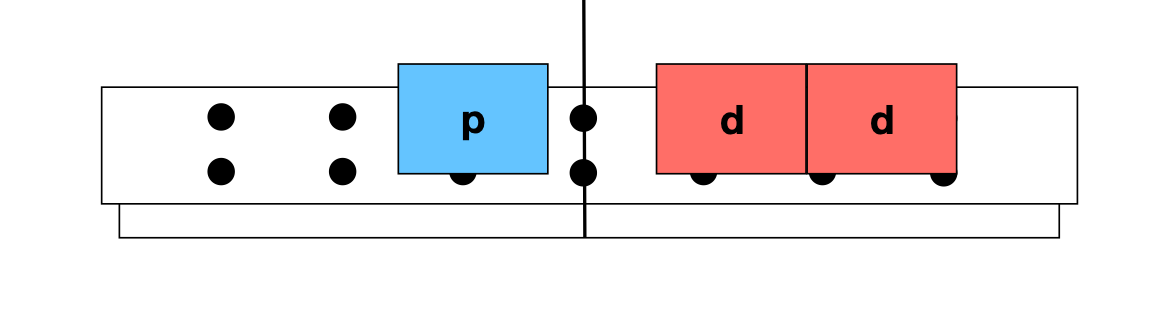
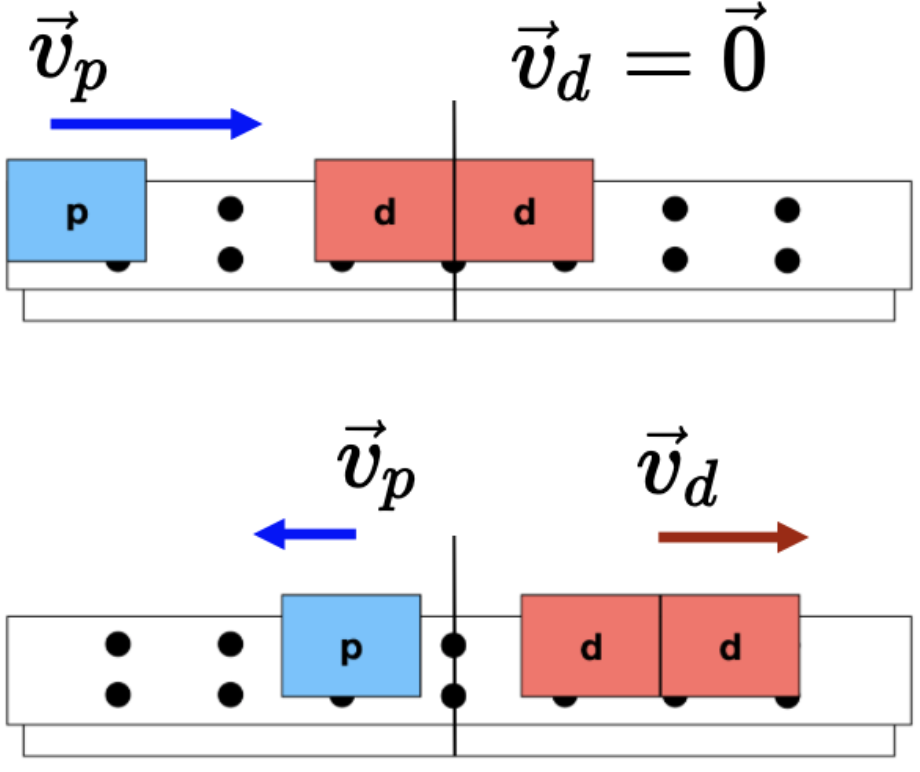
Prendemos dois carros padrões juntos para que o tamanho deste conjunto seja o dobro (d) do tamanho do outro carro padrão (p).
INICIAL
FINAL
FINAL
INICIAL
final - inicial
final - inicial
O que significa esse sinal negativo?
O que significa esse sinal negativo?
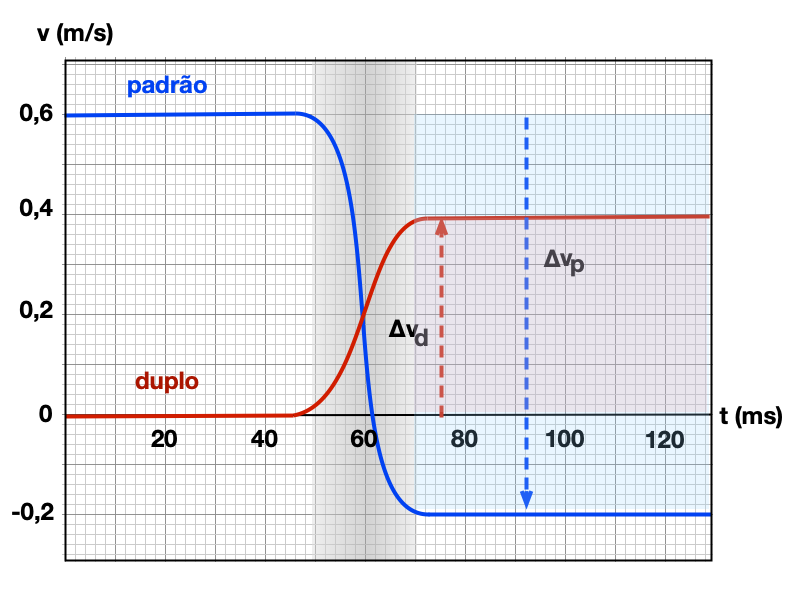
As Leis de Newton
Não importa como os carros se movam (ou não se movam) inicialmente, a variação de velocidade do carro duplo é diferente da variação da velocidade do carro padrão.
A variação de velocidade do carro padrão é negativa.
A variação da velocidade do carro duplo é positiva.
Para o carro duplo a magnitude da variação da velocidade é a metade da magnitude da variação da velocidade do carro padrão.
As Leis de Newton
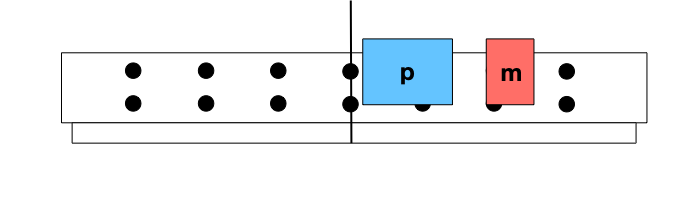
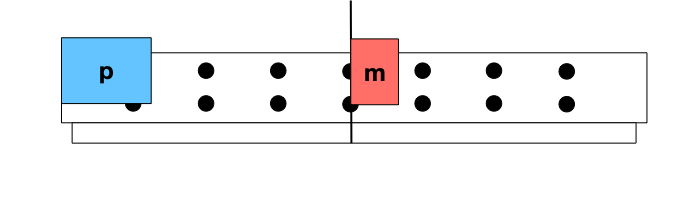
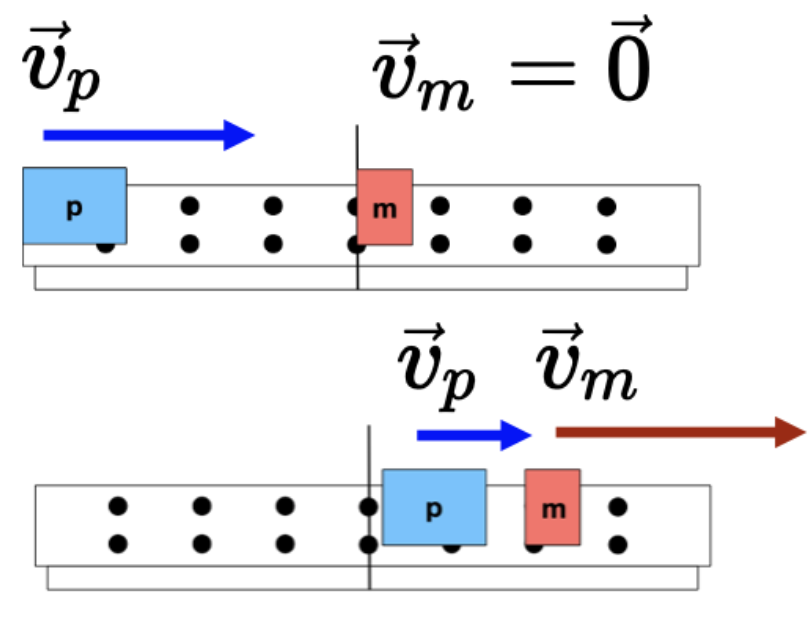
Cortamos um carro padrão ao meio para que o tamanho desta unidade seja a metade (m) do tamanho do outro carro padrão (p).
INICIAL
FINAL
FINAL
INICIAL
final - inicial
final - inicial
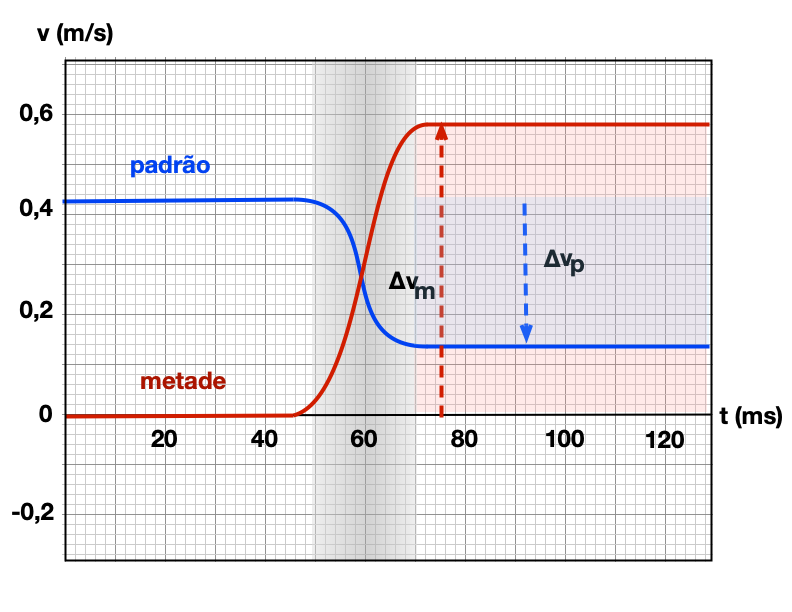
As Leis de Newton
Não importa como os carros se movam (ou não se movam) inicialmente, a variação da velocidade do meio-carro é diferente da variação da velocidade do carro padrão.
A variação da velocidade do carro padrão é negativa.
A variação de velocidade do meio-carro é positiva.
Para o meio-carro a magnitude da variação da velocidade é o dobro da magnitude da variação da velocidade do carro padrão.
As Leis de Newton
Para dois carros padrões que não são idênticos observamos que:
Caso 3
Caso 4
As Leis de Newton
A razão das inércias dos dois carros é igual ao inverso da razão de suas variações de velocidade.
Se
| Experimento | Carro 1 | Carro 2 | ||
|---|---|---|---|---|
| 1 e 2 | padrão | padrão | 1,0 | 1,0 |
| 3 | padrão | dobro | 2,0 | 0,5 |
| 4 | padrão | metade | 0,5 | 2,0 |
Inércia (\(m\))
Razão das inércias
Razão da variação das velocidades
Verificamos experimentalmente que existe uma relação entre a inércia e a variação das velocidades:
As Leis de Newton
A aceleração média de cada carrinho é:
E a razão entre as acelerações são proporcionais a uma constante positiva que depende apenas das partículas e não depende do movimento de cada partícula. A razão é proporcional às massas inerciais, mas em uma razão inversa:
Colisões de curto e longo alcance
As Leis de Newton
No movimento forçado a interação da partícula A com a partícula B se manifesta pelo fato do corpo sair do Movimento Retilíneo Uniforme.
As forças sempre vêm aos pares (reciprocidade da força):
Quando dois objetos interagem, cada um exerce uma força sobre o outro.
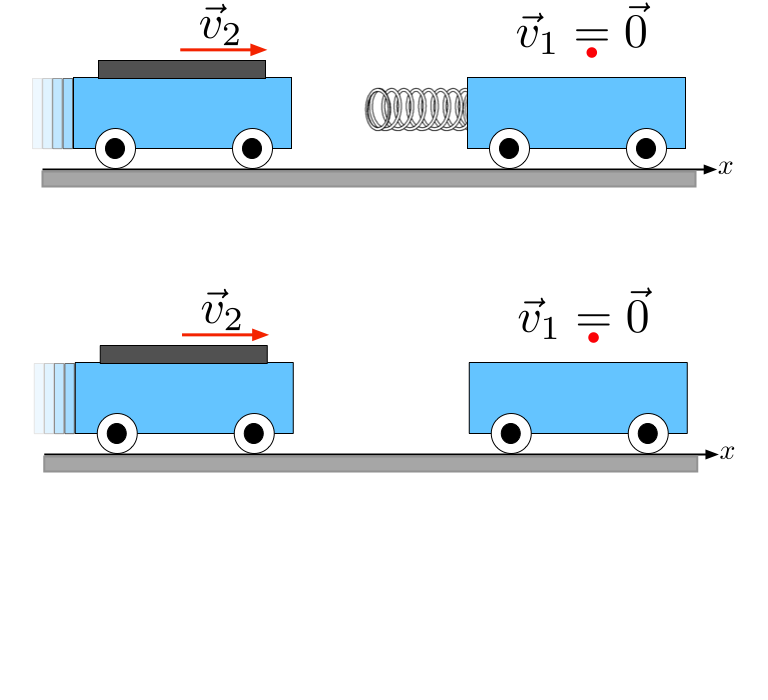
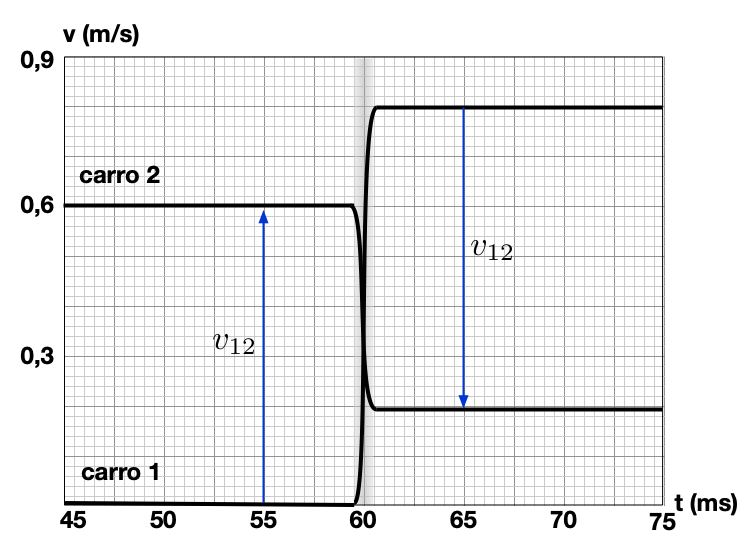
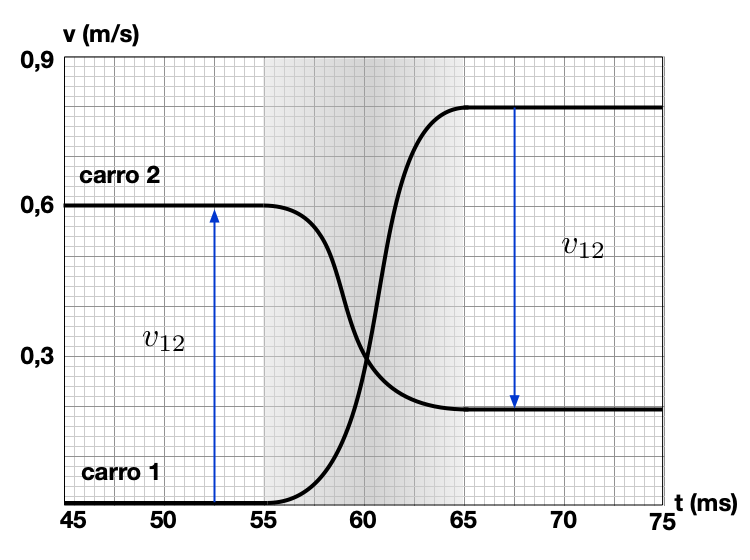
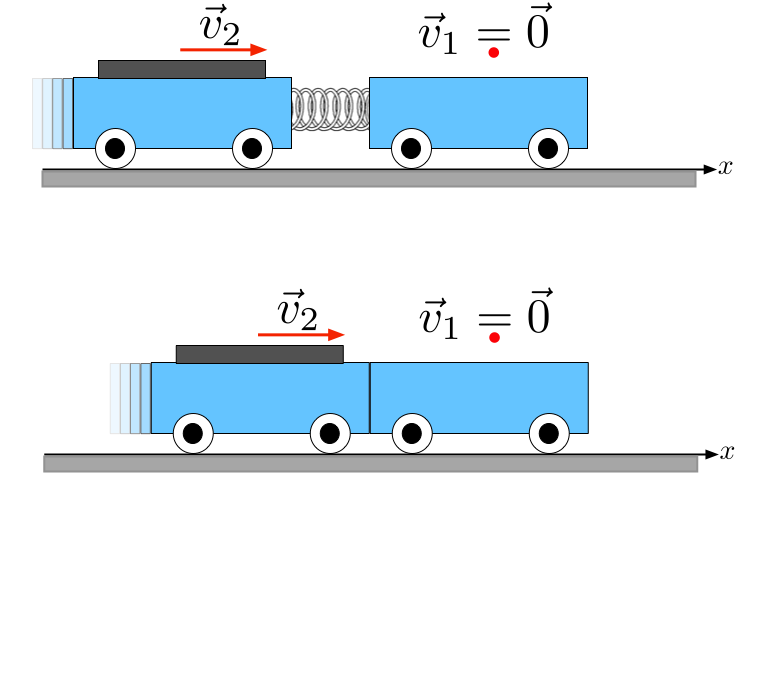
A única diferença entre as duas colisões é que a interação é suavizada por uma mola.
sem mola \(\Rightarrow\)
\(\Leftarrow\) com mola
As Leis de Newton
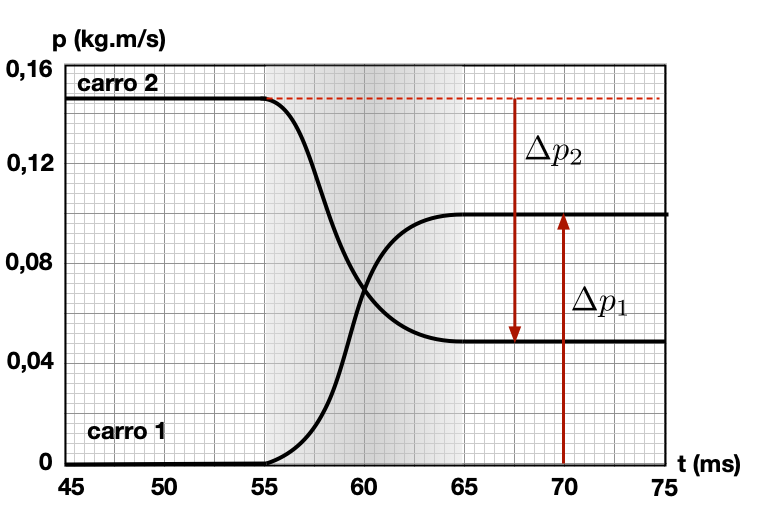
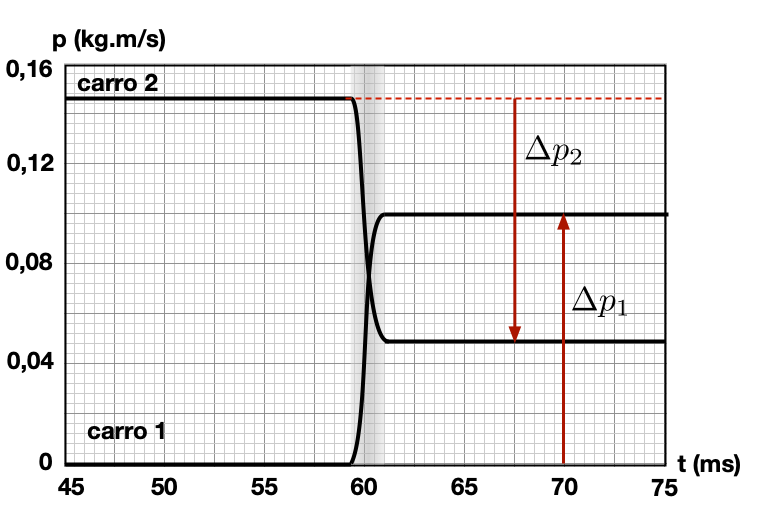
A variação de momento do carrinho 1 é compensada por uma variação no momento do carrinho 2. Vejamos a interação do sistema isolado dos carros com mola.
carro 1
carro 2
Sistema Isolado dos carros com mola
As Leis de Newton
Em ambas as colisões a variação de momento do carrinho 1 é compensada por uma variação no momento do carrinho 2. Vejamos a interação do sistema de carros sem mola.
carro 1
carro 2
Sistema Isolado dos carros sem mola
As Leis de Newton
Sempre que dois objetos interagem, exercem um sobre o outro forças que são iguais em magnitude e direção, mas opostas em sentido.
O par de forças que dois objetos em interação exercem um sobre o outro é chamado par de interação.
As Leis de Newton
A conclusão de que objetos em interação exercem forças iguais na mesma direção, mas em sentidos opostos um sobre o outro é um resultado direto da lei da conservação do momento e da nossa definição de força.
não há força externa resultante!
há força internas que são um par de interação!
A equação de movimento permite obter toda a história do movimento do objeto:
Vamos obter as funções velocidade e posição:
Integrando de uma velocidade inicial em \(t_i\) = 0 a uma velocidade final em \(t_f\) = t:
Reescrevendo:
Integrando de uma posição inicial em t = 0 a uma posição final em t = t:
A equação de movimento
By Ronai Lisboa
Dinâmica. As Leis de Newton. Diagrama de forças. Aplicações das leis de Newton: peso, planos inclinados, fios, polias.



