Contact Sampling for
Contact Rich Manipulation
28 April 2023
By Shao Yuan Chew Chia
Joint work with: Terry Suh, Pang Tao, Sizhe Li
Contact Sampling Problem
Given a goal state \(x_g\) and current state \(x\) of the object,
how should you position the robot \(q\) to best reach \(x_g\),
through subsequent commands \(u\)
\(x_g\)
\(x\)
\(q\)
\(u\)
Why this problem?
Address the discrete question of where/how to make contact
\(x_g\)
\(x\)
\(q_{1}\)
\(q_{2}\)
Why this problem?
Address the discrete question of where/how to make contact
\(x_g\)
\(x\)
\(q_{1}\)
\(q_{2}\)
General Problem Area
Motion planning for high dimensional contact-rich manipulation
| Classes of Methods | Trajectory Optimization | Sampling based motion planning | Learning based methods |
|---|---|---|---|
| Examples | Continuous trajectory optimization |
Rapidly exploring Random Tree (RRT) | Reinforcement Learning, Behavior cloning |
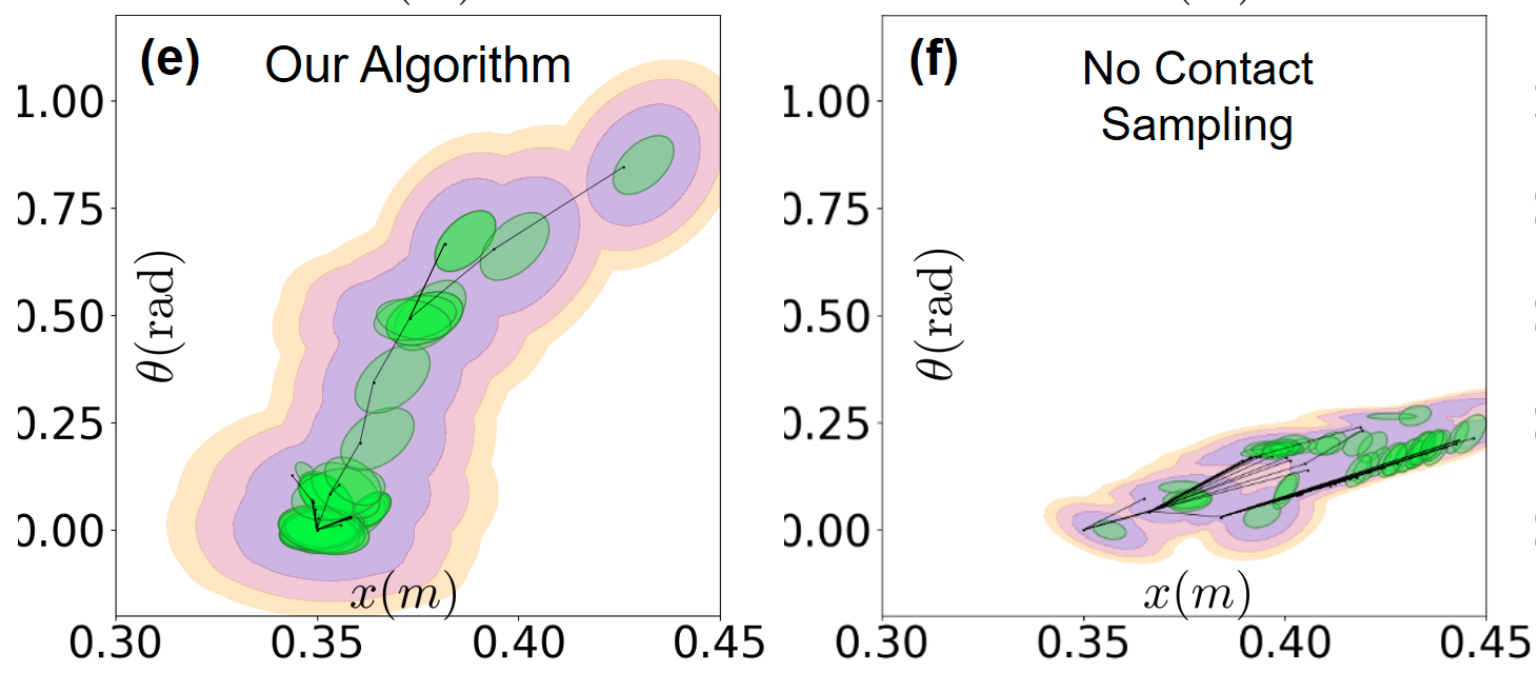
| How contact sampling can help | Provide good initial guesses | Increase state space coverage of "extend" step | Improve sample efficiency |
Improving Trajectory Optimization
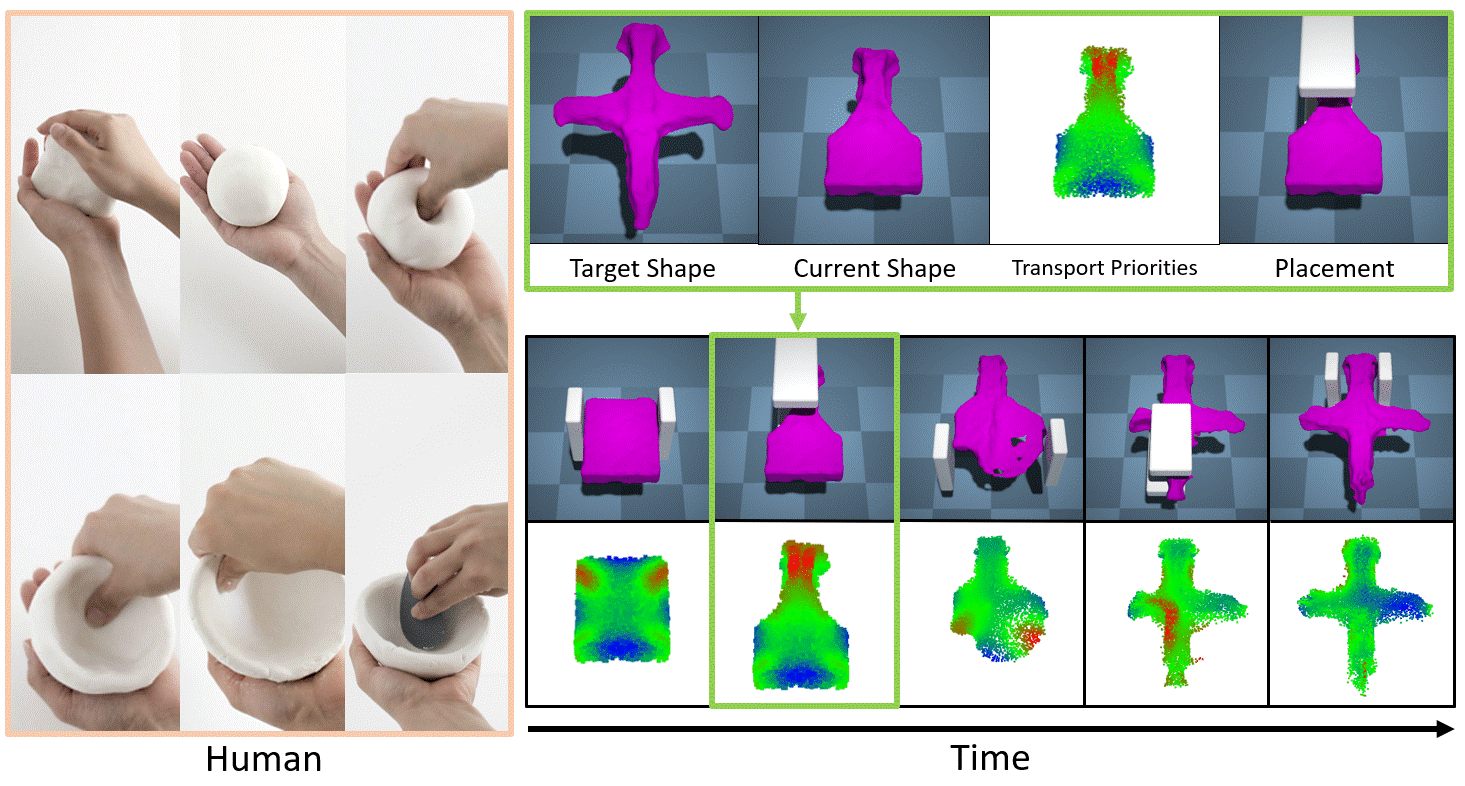
Uses optimal transport to define a heuristic for which particles need to move the most
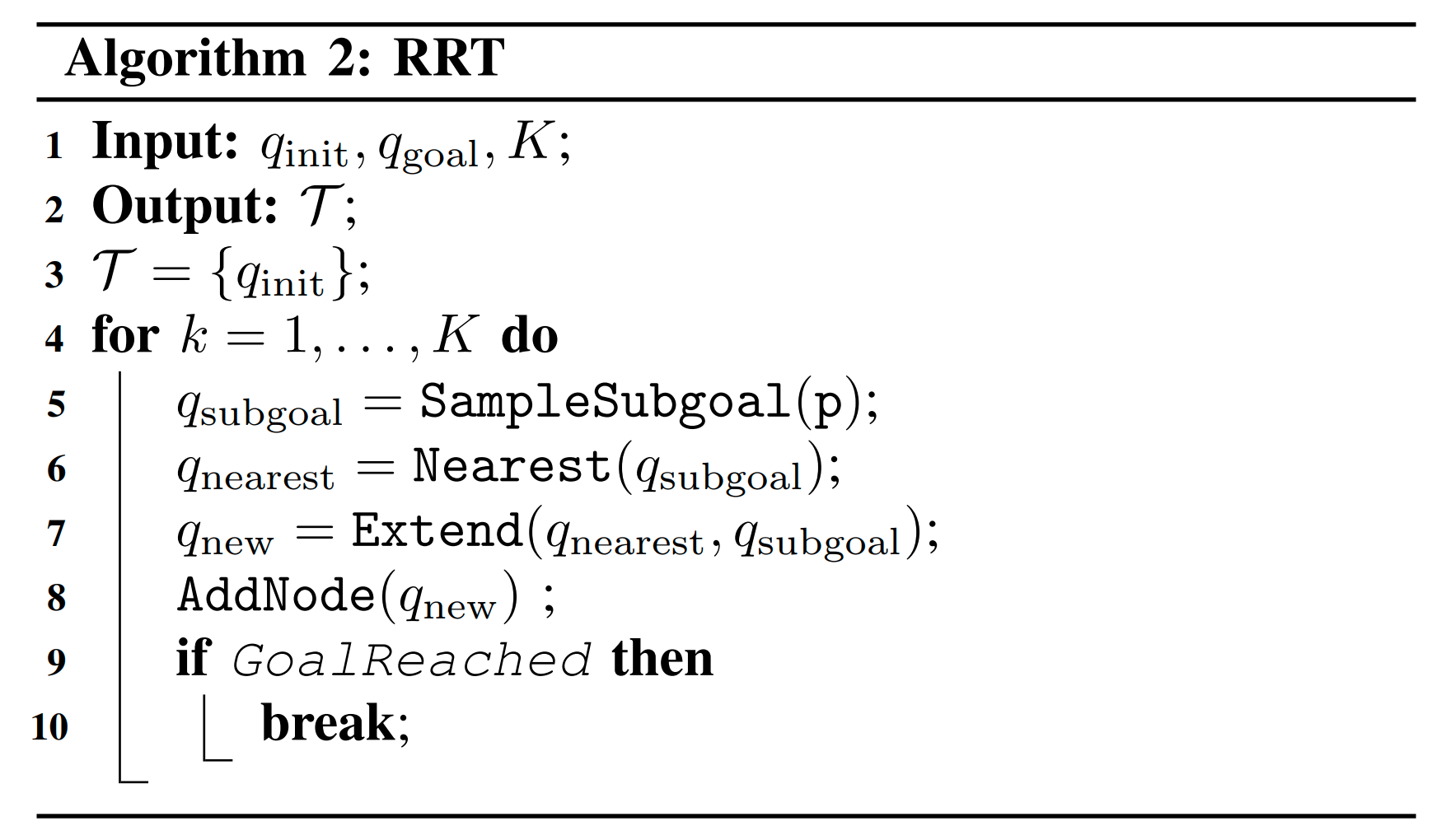
Improving RRT

Contact Sampling Problem
Given a goal state \(x_g\) and current state \(x\) of the object,
how should you position the robot \(q\) to best reach \(x_g\),
through subsequent commands \(u\)
\(x_g\)
\(x\)
\(q\)
\(u\)
Contact Sampling Problem
Given a goal state \(x_g\) and current state \(x\) of the object,
how should you position the robot \(q\) to best reach \(x_g\),
through subsequent commands \(u\)
\(x_g\)
\(x\)
\(q\)
\(u\)
Long horizon question
Modified Problem
Given a goal state \(x_g\) and current state \(x\) of the object,
find the robot position \(q\), that would in one subsequent command \(u\), minimize the object's distance to the goal,
\(x_g\)
\(x\)
\(q\)
\(u\)
\min_{q\in\mathcal{A}(x)} d( x_g, f(x,q,u))
Assumptions
-
Discrete time
-
Quasistatic dynamics
-
Absolute position commands
s_{next} = f(x, q, u)
s = \begin{bmatrix}x\\ q\end{bmatrix}
Solution Sketch
Input: \(x\), \(x_g\)
Output: \(N\) best \(q\)'s
- Sample \(M\) initial admissible positions of the robot \(q_0\)
- Rejection sample via collision checker
- Uniform distribution over workspace
- Do gradient descent to evolve the initial positions
- At each step, project \(q\) back into admissible set
- Return \(N\) best \(q\)'s
Key Challenge
contact dynamics lead to the cost landscape being flat
\min_{q\in\mathcal{A}(x)} d( x_g, f(x,q,u))
Solution 1:
Randomized Smoothing of the cost
\min_{q\in\mathcal{A}(x)} d( x_g, f(x,q,u))
\min_{q\in\mathcal{A}(x)} \mathbb{E}_w \left[d(x_g, f(x, q, q+w))\right] \qquad w\sim\mathcal{N}(0,\sigma^2)
Cost landscape: Randomized Smoothing (Warm up 1)
- [x,y,theta]
- x_init
[0,0,0] (Blue) - x_goal
[2,0,0] (Green)
- x_init
[0,0,0]
(Blue) - x_goal
[-1.5,-1.5,1] (Green)
Cost landscape: Randomized Smoothing (Warm up 2)
Cost landscape: Randomized Smoothing (Distance from Goal)
\(x_g\) = [0.3, 0, 0]
\(x_g\) = [2, 0, 0]
Cost landscape: Randomized Smoothing (Action Standard Deviation, Goal Near)
std = 0.01
std = 0.1
Cost landscape: Randomized Smoothing (Action Standard Deviation, Goal Far)
std = 0.01
std = 0.1
Cost landscape: Randomized Smoothing (Action Standard Deviation Animations)
std = [0.01 , ... , 1]
Cost landscape: Randomized Smoothing
Sample Aggregation Function
Min
Mean
Max
Non-Physical Behavior of Anitescu Convex Relaxation
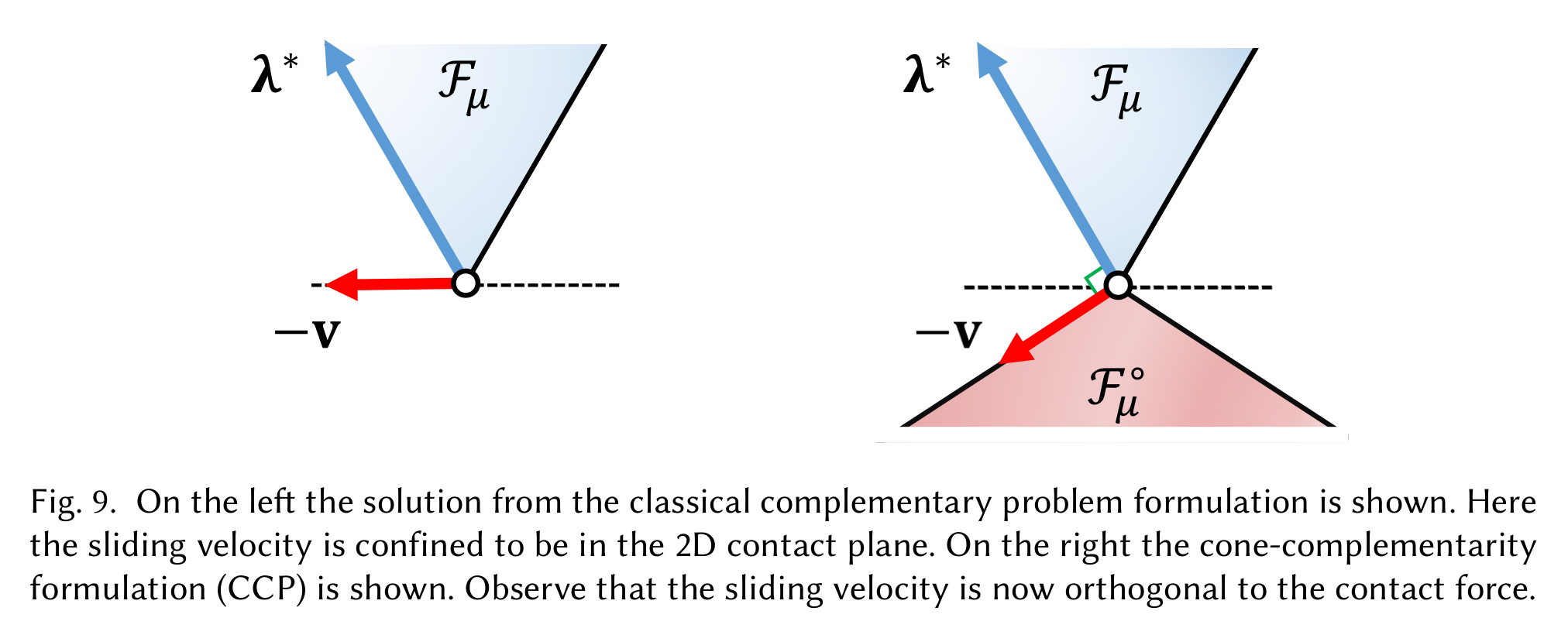
Andrews, S., Erleben, K., & Ferguson, Z. (2022). Contact and friction simulation for computer graphics. In ACM SIGGRAPH 2022 Courses (pp. 1-172).
Non-Physical Behavior of Anitescu Convex Relaxation
Effect on Cost Landcape (std = 0.5)
Incremental steps = 10
Incremental steps = 5
Incremental steps = 1
Non-Physical Behavior of Anitescu Convex Relaxation
Effect on Cost Landcape (std = 0.1)
Incremental steps = 10
Incremental steps = 5
Incremental steps = 1
Zeroth Order Batch Gradient
Randomized Smoothing of
cost
Gradient Computation
We want to solve
\min_{q} \mathbb{E}_w \left[d(x_g, f(x, q, q+w))\right] \qquad w\sim\mathcal{N}
(0,\sigma_{w}^2\mathbf{I})
To use zeroth-order methods, we can instead choose a surrogate objective
\min_{q} \mathbb{E}_{v,w} \left[d(x_g, f(x, q+v, q+v+w))\right]
w\sim\mathcal{N}(0,\sigma_{w}^2\mathbf{I}) \text{ and } v\sim\mathcal{N}(0,\sigma_v^2\mathbf{I})
Gradient Computation
\nabla_q \mathbb{E}_{v,w} \left[d(x_g, f(x, q+v, q+v+w))\right]
= \mathbb{E}_{v,w} \left[\frac{v}{\sigma^2_v}\left[d(f(x, q +v, q+v+w),x_g)- \mu^*\right] \right]
\mu^* = {E}_{v,w} \left[d(x_g, f(x, q+v, q+v+w))\right]
where
which has the unbiased estimator of the sample mean, i.e.
\mu_{\rho}(q) = \frac{1}{N}\sum^N_{i=1} v_i\left[d(f(x, q + v_i, q + v_i + w_i), x_g)\right]
Gradient Computation
\nabla_q \mathbb{E}_{v,w} \left[d(x_g, f(x, q+v, q+v+w))\right]
= \mathbb{E}_{v,w} \left[\frac{v}{\sigma^2_v}\left[d(f(x, q +v, q+v+w),x_g)- \mu^*\right] \right]
Thus the natural estimator of the gradient is
\frac{1}{\sigma_v^2}\frac{1}{N}\sum^N_{i=1} v_i\left[d(f(x, q + v_i, q + v_i + w_i), x_g) - \mu_{\rho}(q)\right]
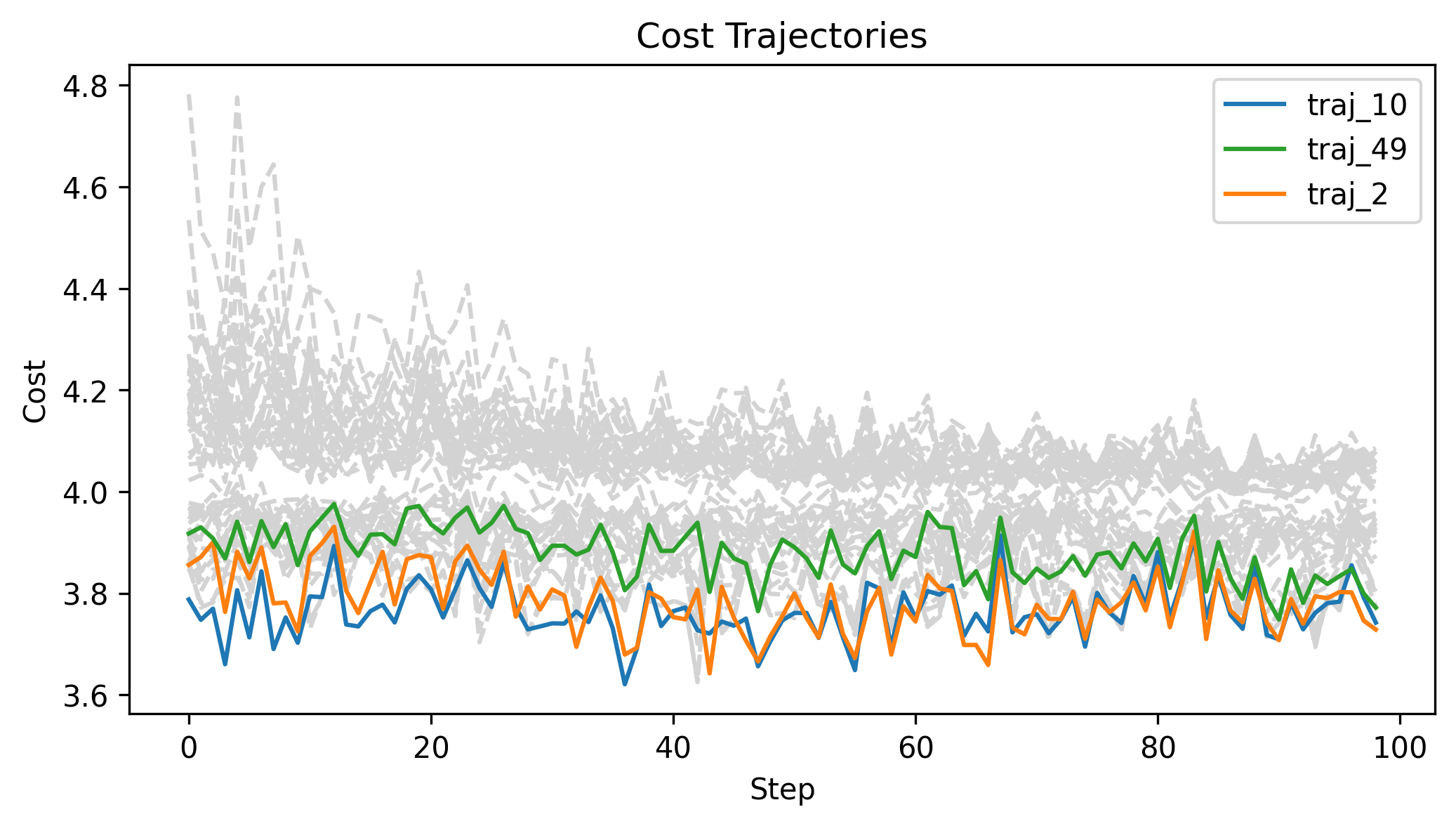
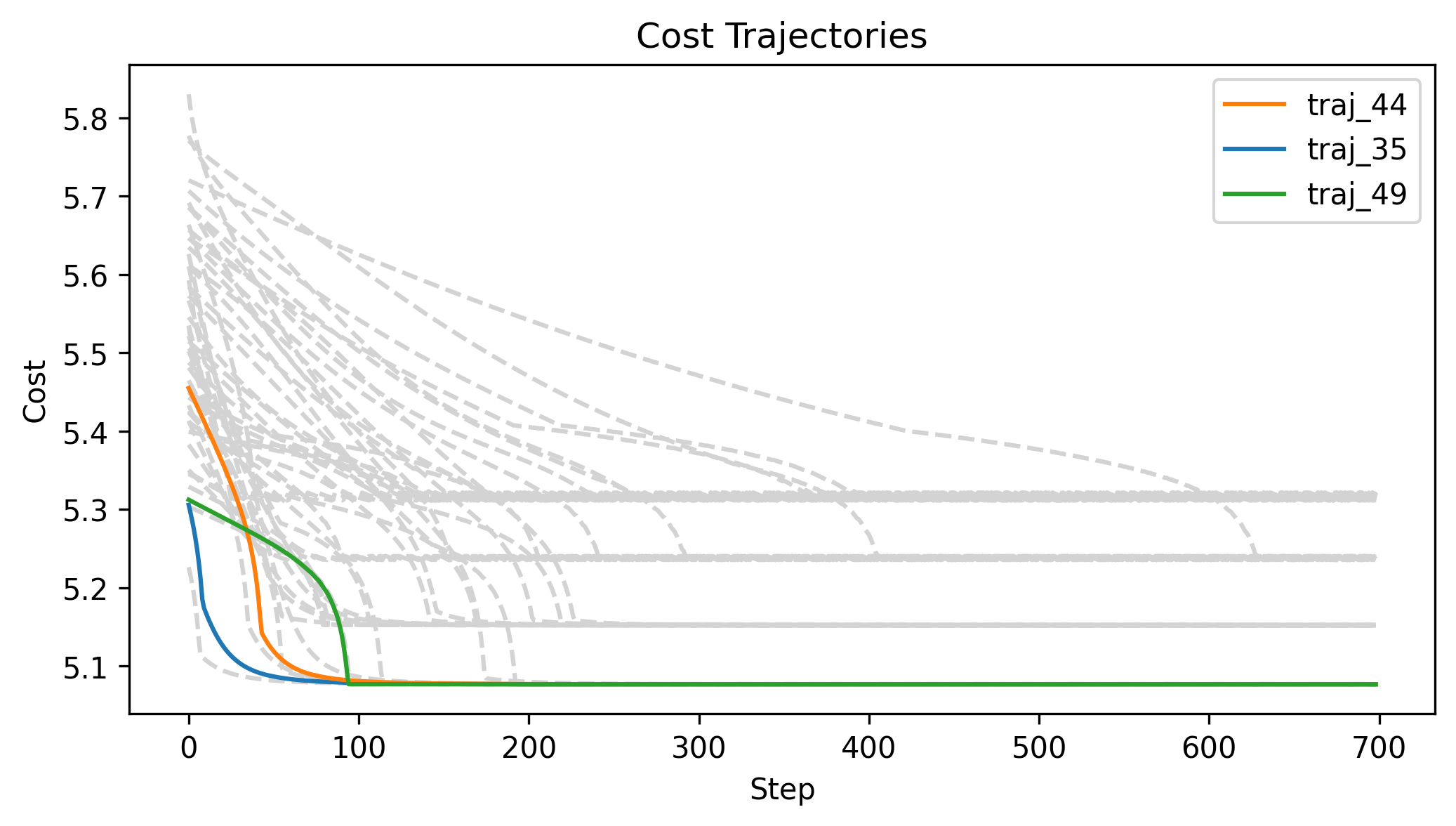
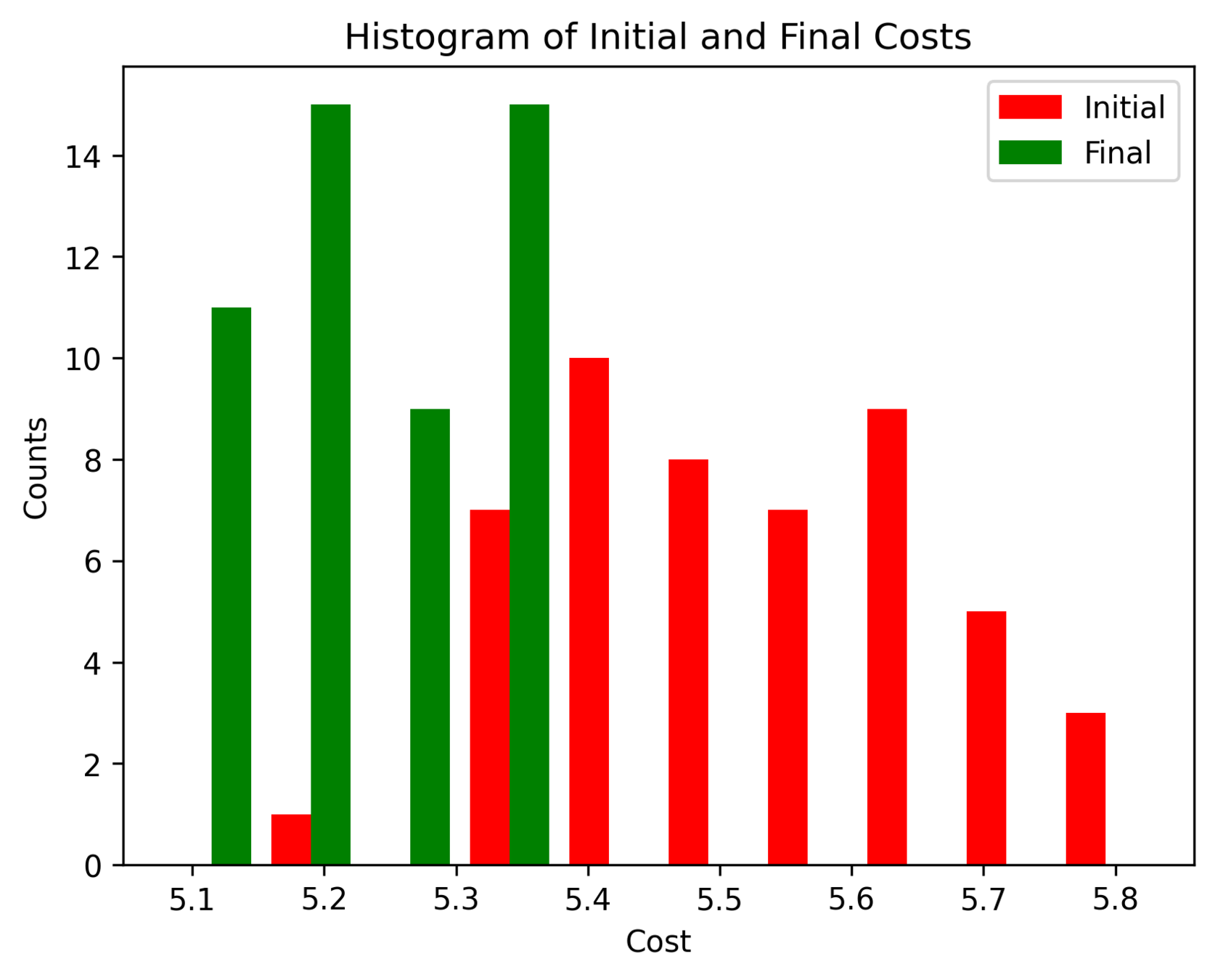
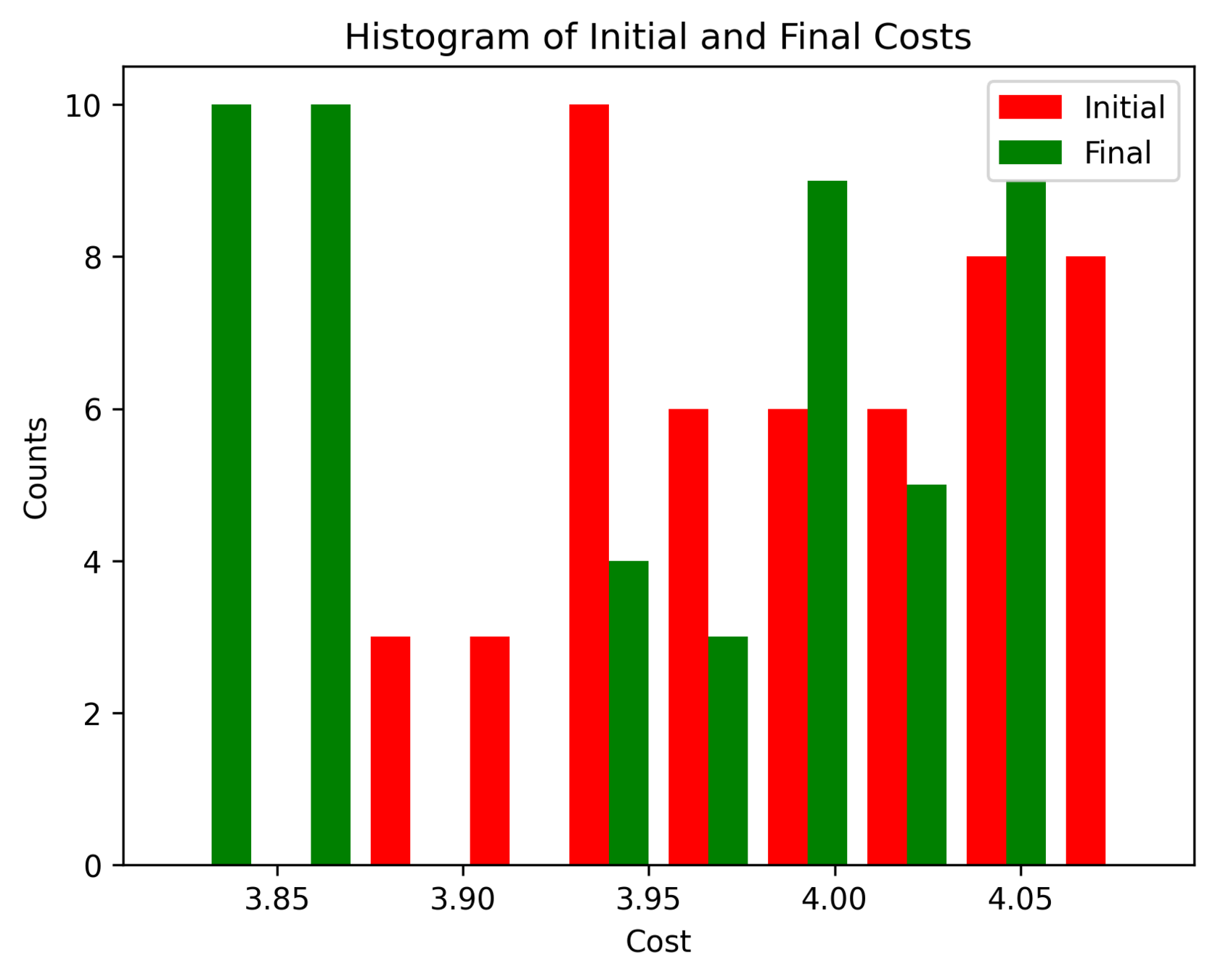
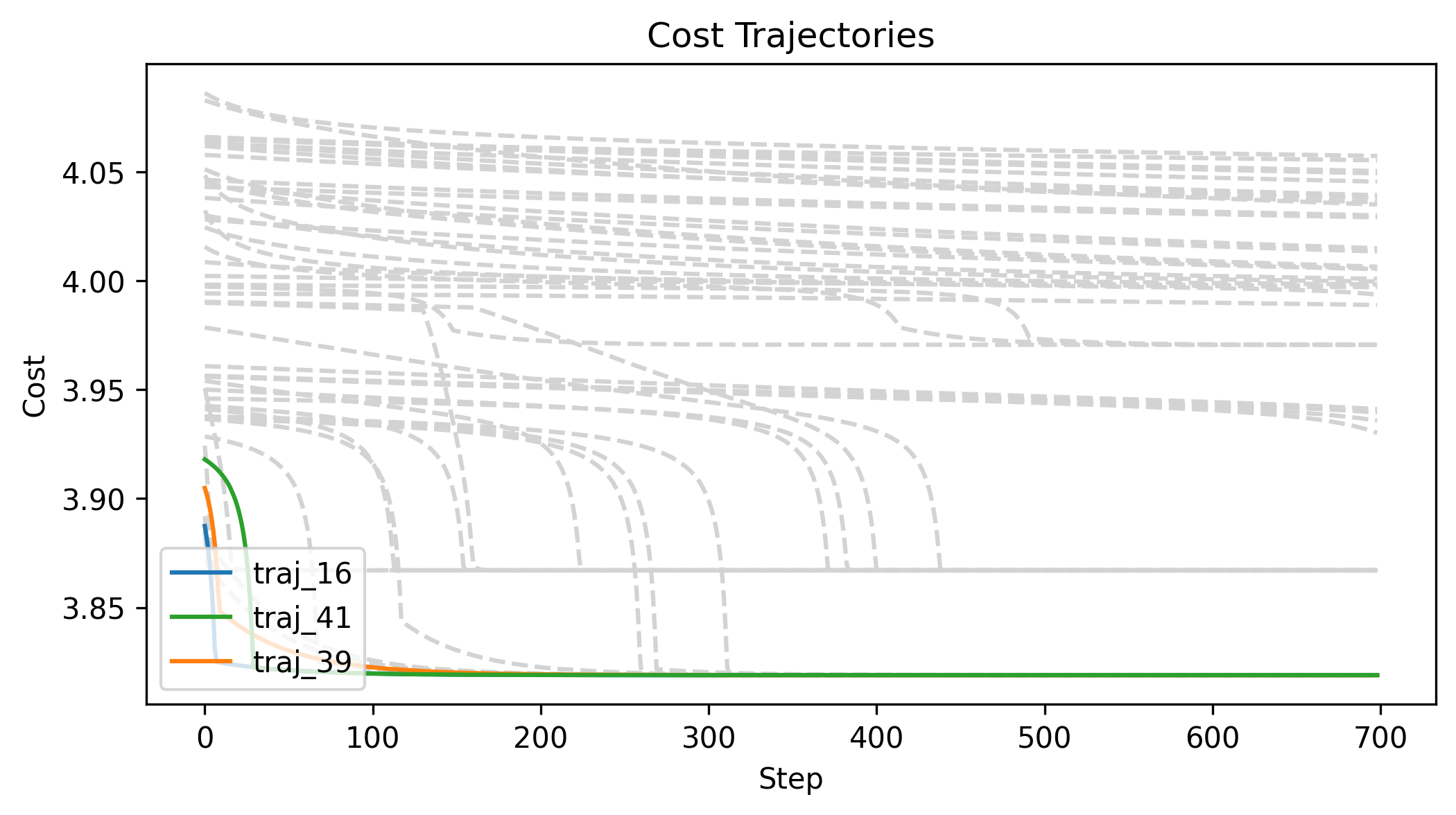
Zeroth Order Batch Gradient
\(x_g\) = [2,0,0], q_std = 0.1, u_std = 0.1, h=0.01
Zeroth Order Batch Gradient
\(x_g\) = [2,0,0], q_std = 0.1, u_std = 0.1, h=0.01

Zeroth Order Batch Gradient
\(x_g\) = [-1.5,-1.5,1], q_std = 0.1, u_std = 0.1, h=0.01
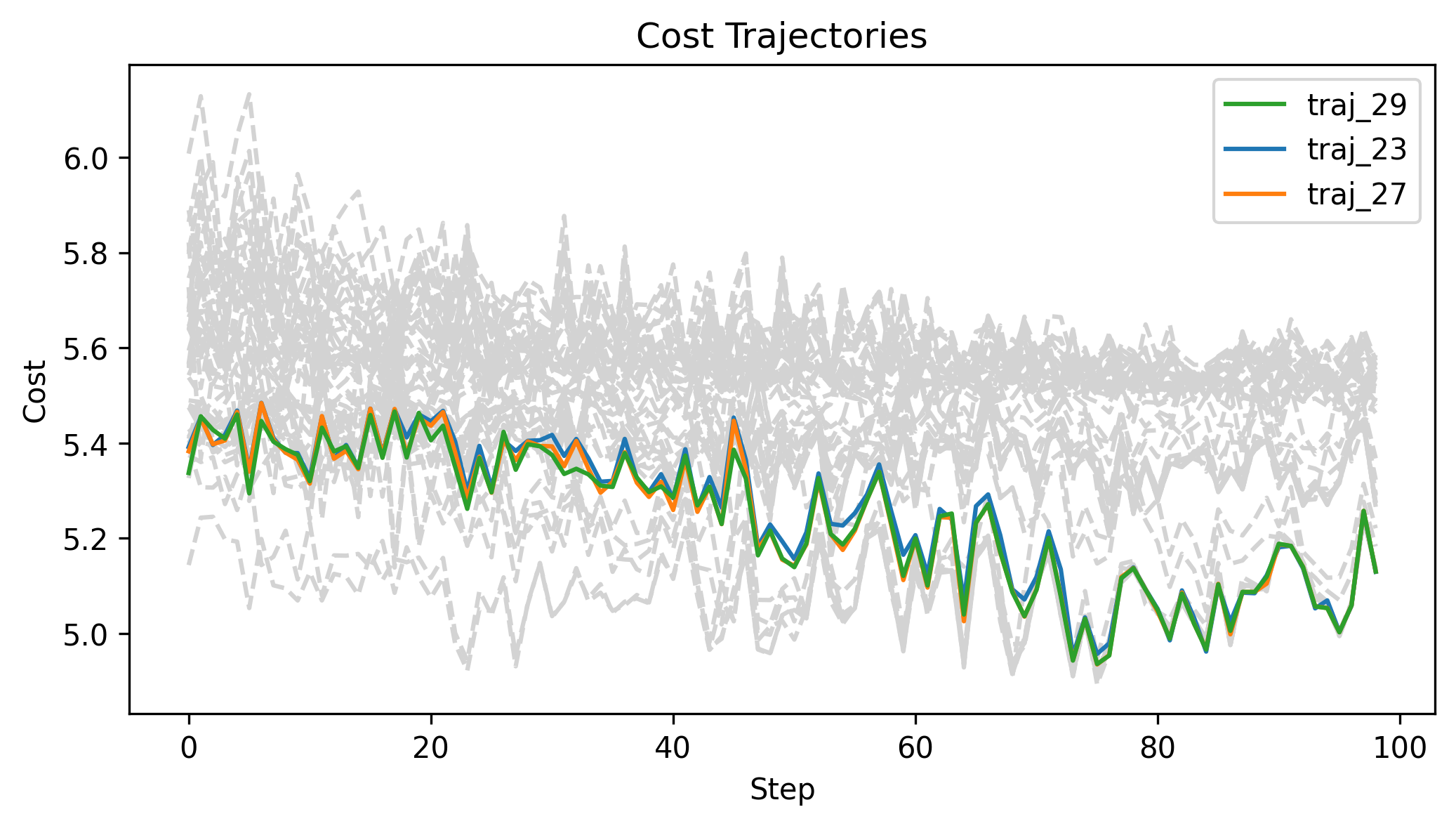
Zeroth Order Batch Gradient
\(x_g\) = [-1.5,-1.5,1], q_std = 0.1, u_std = 0.1, h=0.01

Zeroth Order Batch Gradient
\(x_g\) = [-1.5,-1.5,1], q_std = 0.1, u_std = 0.1, h=0.01
Zeroth Order Batch Gradient
\(x_g\) = [2,0,0], q_std = 0.1, h=0.01
u_std = 0.1
u_std = 0.3
u_std = 0.5
Zeroth Order Batch Gradient
\(x_g\) = [2,0,0], u_std = 0.3, h=0.01
q_std = 0.05
q_std = 0.1
q_std = 0.3
Zeroth Order Batch Gradient
\(x_g\) = [2,0,0], u_std = 0.3, h=0.05
q_std = 0.05
q_std = 0.1
q_std = 0.3
Solution 2:
Analytic Smoothing of
Contact Dynamics
Cost Landscape: Analytic Smoothing of Contact Dynamics
\(x_g\) = [2,0,0]
Log barrier weight = 1000
(0.001N at 1m)
Log barrier weight = 100
(0.01N at 1m)
Log barrier weight = 10
(0.1N at 1m)
Cost Landscape: Analytic Smoothing of Contact Dynamics
\(x_g\) = [0.3,0,0]
Log barrier weight = 1000
(0.001N at 1m)
Log barrier weight = 100
(0.01N at 1m)
Log barrier weight = 10
(0.1N at 1m)
Cost Landscape: Analytic Smoothing of Contact Dynamics
\(x_g\) = [-1.5,-1.5,1]
Log barrier weight = 1000
(0.001N at 1m)
Log barrier weight = 100
(0.01N at 1m)
Log barrier weight = 10
(0.1N at 1m)
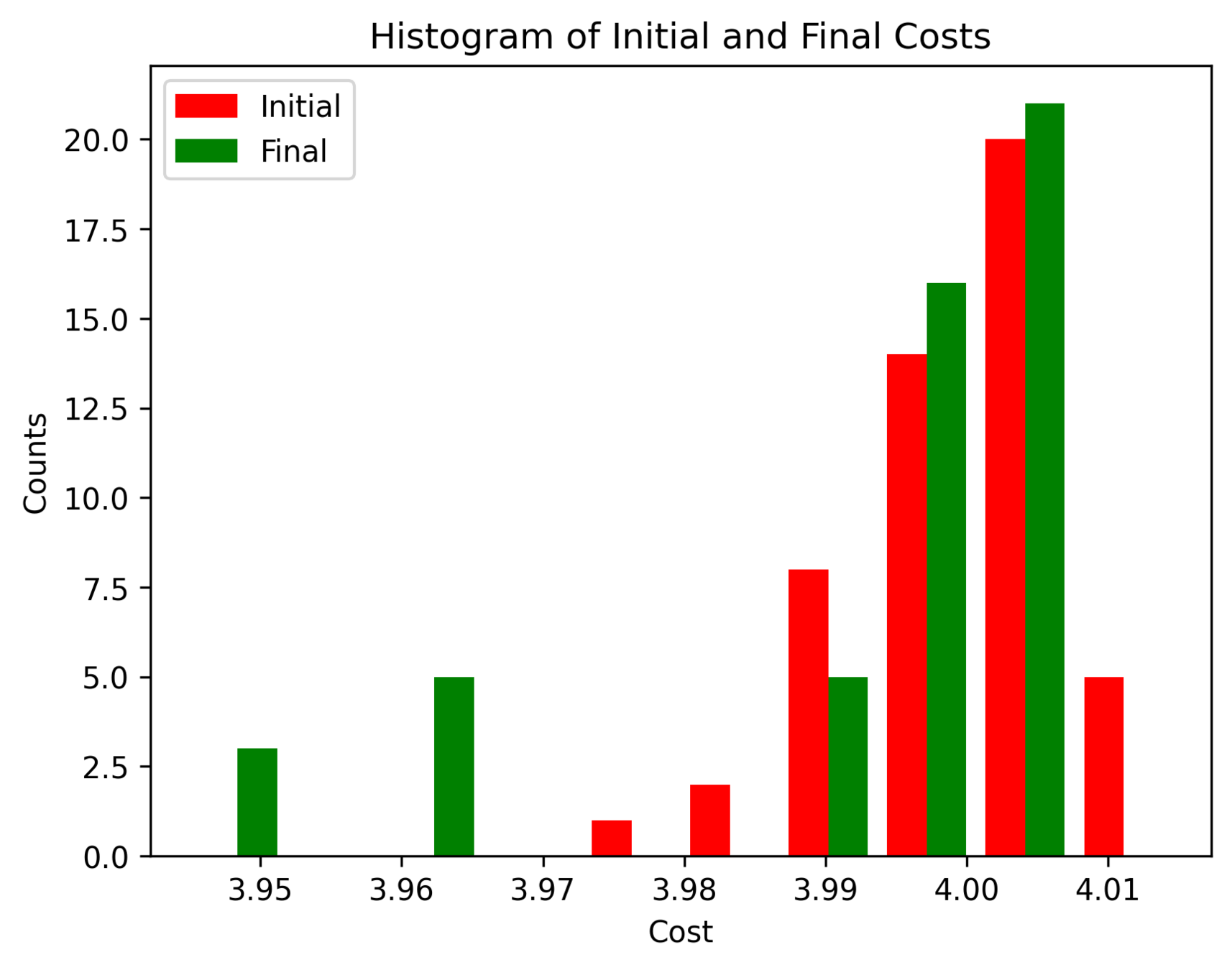
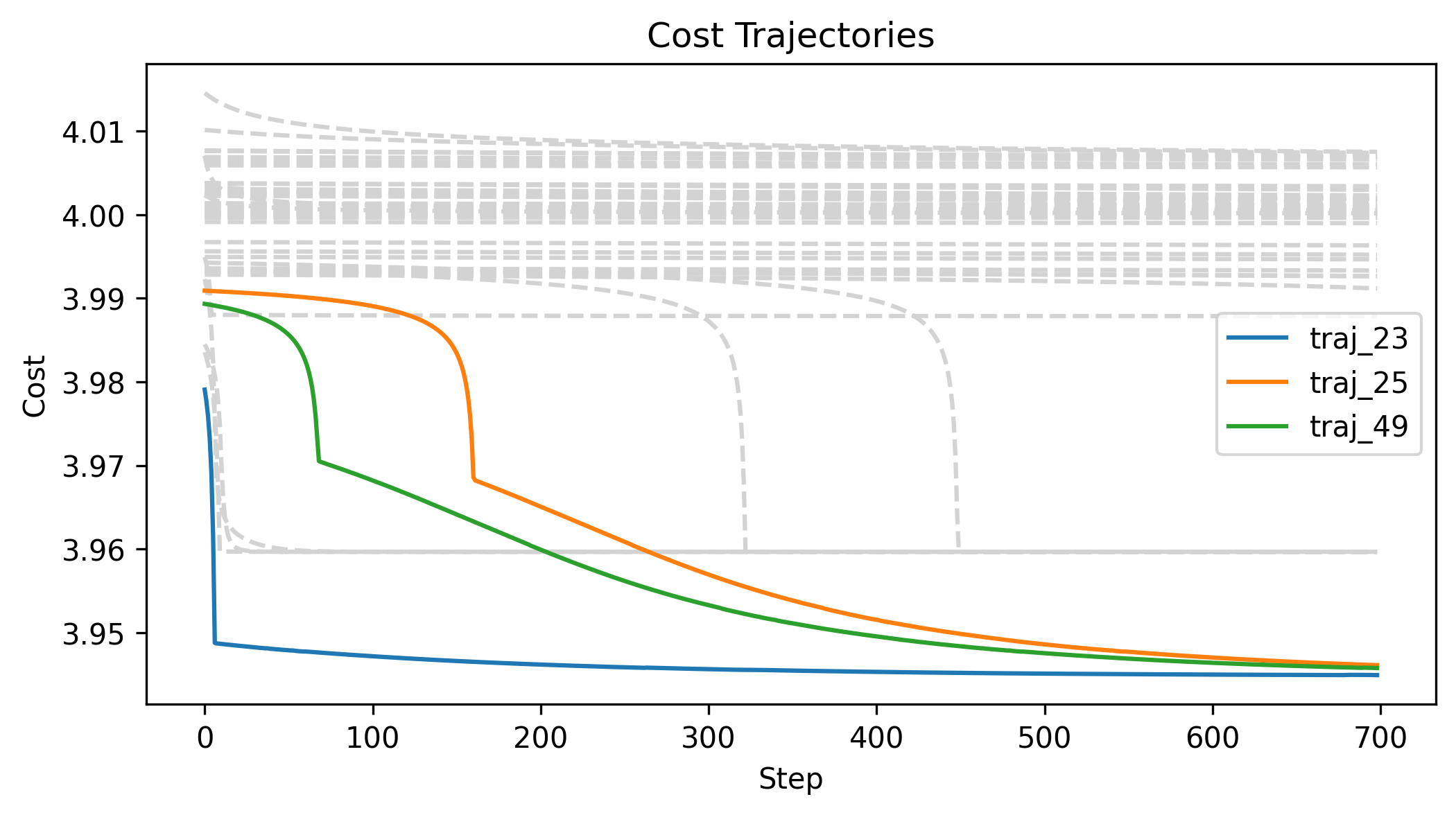
First Order Batch Gradient
Analytic Smoothing of
Contact Dynamics
Gradient Computation
x' = f_x(x, q, u)
s' = f(x, q, u)
x' = f^{\rho}_x(x, q, u)
Full state dynamics
Just next object state
Just next object state, but analytically smoothed dynamics
Gradient Computation
We want to calculate
Analytically smoothed dynamics that takes a relative position command \(u_r\) and only returns \(x\)
\nabla_q d(f^{\rho r}_x(x, q, u_r), x_g)
u(q, u_r) \coloneqq q + u_r
f^{\rho}_x(x, q, u(q,u_r)) = f^{\rho r}_x(x, q, u_r)
Absolute position command as a function of robot position and relative position command
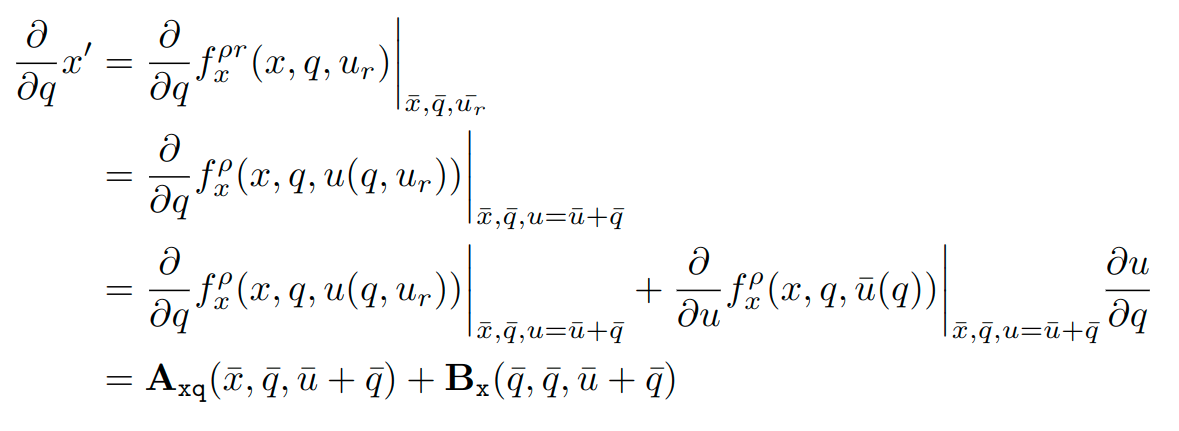
Gradient Computation
\nabla_q d(f^{\rho r}_x(x, q, u_r), x_g)
= \frac{\partial}{\partial q} x'^\top\bigg|_{x'=f^{\rho r}_x(\bar{x}, \bar{q}, \bar{u_r})}\frac{\partial }{\partial x'} d(x_g, x')\bigg|_{x'=f^{\rho r}_x(\bar{x}, \bar{q}, \bar{u_r})}
Gradient Computation
Gradient Computation
\frac{\partial }{\partial x'} d(x_g, x') = -2 \mathbf{Q} (x_g - x')
d(x_g,x')=(x_g - x')^\top \mathbf{Q} (x_g - x')
Weighted L2 Norm Cost
Gradient Computation
= -2 [\mathbf{A}_{\mathtt{xq}}(\bar{x},\bar{q},\bar{u}+\bar{q}) + \mathbf{B}_{\mathtt{x}}(\bar{q},\bar{q},\bar{u}+\bar{q})]\mathbf{Q} (x_g - x')
\nabla_q d(f^{\rho r}_x(x, q, u_r), x_g)
= \frac{\partial}{\partial q} x'^\top\bigg|_{x'=f^{\rho r}_x(\bar{x}, \bar{q}, \bar{u_r})}\frac{\partial }{\partial x'} d(x_g, x')\bigg|_{x'=f^{\rho r}_x(\bar{x}, \bar{q}, \bar{u_r})}
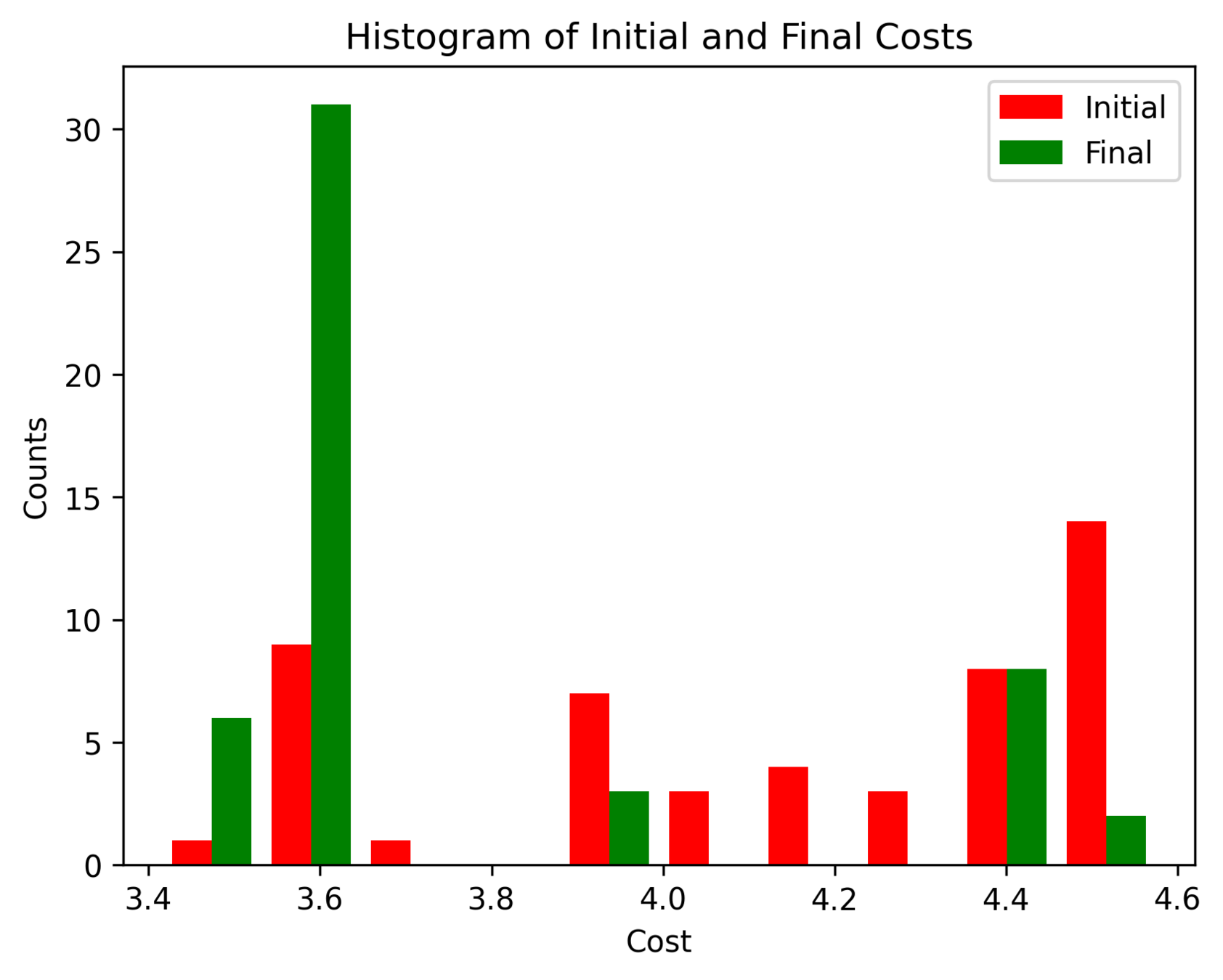
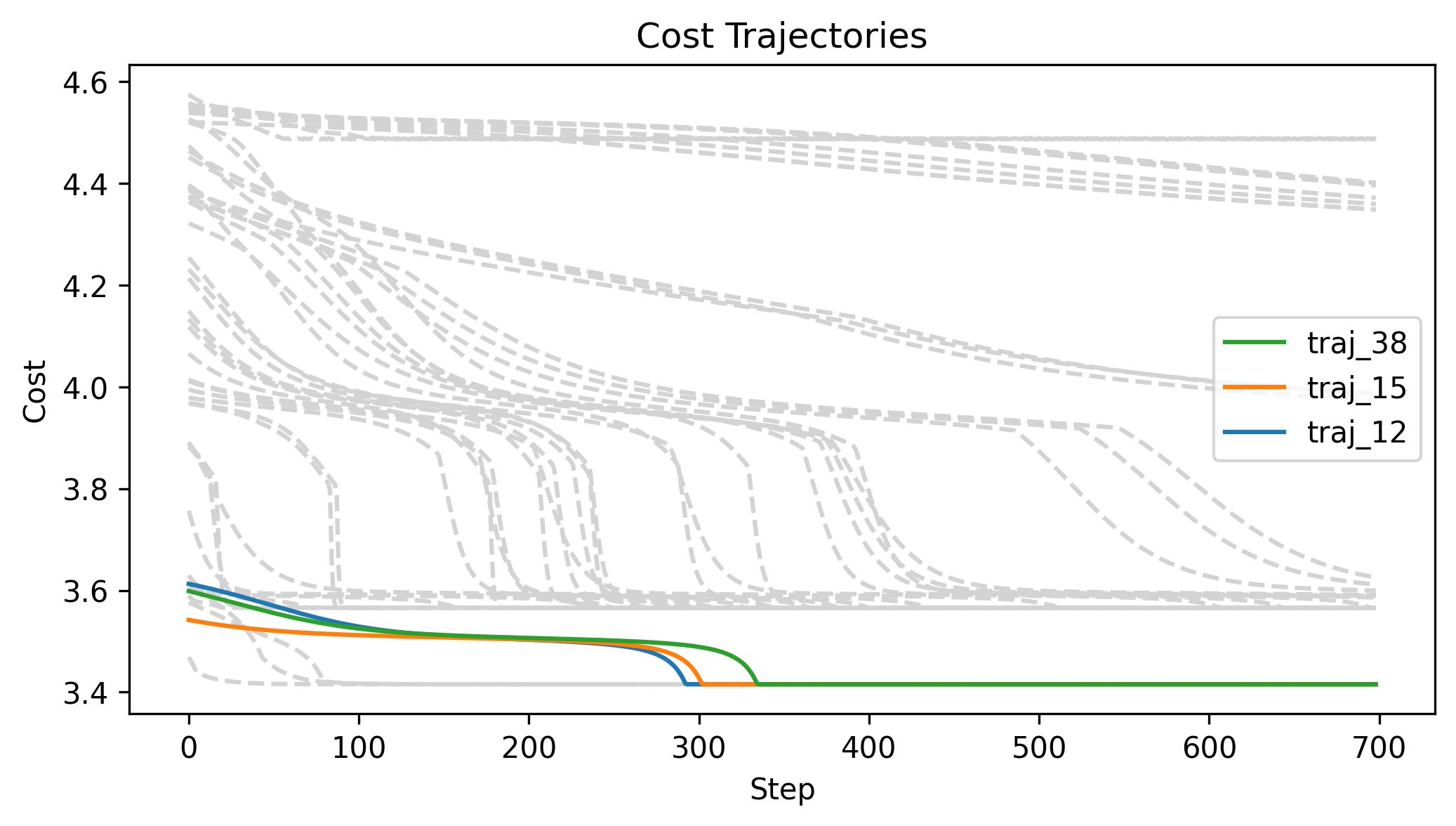
First Order Batch Gradient
\(x_g\) = [-1.5,-1.5,1], log barrier weight = 100, h = 0.01
First Order Batch Gradient
\(x_g\) = [-1.5,-1.5,1], log barrier weight = 100, h = 0.01
First Order Batch Gradient
\(x_g\) = [-1.5,-1.5,1], log barrier weight = 100, h = 0.01
First Order Batch Gradient
\(x_g\) = [-1.5,-1.5,1]
Log barrier weight = 1000
(0.001N at 1m)
Log barrier weight = 100
(0.01N at 1m)
Log barrier weight = 10
(0.1N at 1m)
First Order Batch Gradient
\(x_g\) = [2, 0, 0]
Log barrier weight = 1000
(0.001N at 1m)
Log barrier weight = 100
(0.01N at 1m)
Log barrier weight = 10
(0.1N at 1m)
First Order Batch Gradient \(x_g\) = [2, 0, 0]
Log barrier weight = 1000
(0.001N at 1m)
Log barrier weight = 100
(0.01N at 1m)
Log barrier weight = 10
(0.1N at 1m)
First Order Batch Gradient
\(x_g\) = [0.3, 0, 0]
Log barrier weight = 1000
(0.001N at 1m)
Log barrier weight = 100
(0.01N at 1m)
Log barrier weight = 10
(0.1N at 1m)
Next Steps
- Understand what's going on in the corners
- Try variance schedule/annealing
- Explore randomized smoothing min?
- Try it on more complex rigid body manipulators (Planar hand, Allegro hand)
- Try it on deformable objects (Plasticine Lab)
- Integrate into RRT
Contact Sampling For Contact Rich Manipulation
By shao_yuan
