Quasistatic Deformable Simulation
Current formulation of simulation
\begin{aligned}
\text{min}_{\Omega}\quad & \int_{\Omega} \rho d(x;\Omega_0)^2 dv + \int_{\partial\Omega} 1 ds \\
\text{s.t.} \quad & \psi(x) \geq 0 \quad \forall x\in\Omega\\
& \int_{\Omega} \rho dv = \int_{\Omega_0} dv
\end{aligned}
\begin{aligned}
d \mathcal{L}(\Omega;V) & = \int_{\partial\Omega} \left( d(x;\omega_0) + H(x) + \mu - \lambda(x)\psi(x) \right) V(0) \cdot n ds
\end{aligned}
Formulation
Shape gradients & Optimality conditions
\begin{aligned}
\mu
\end{aligned}
\begin{aligned}
\lambda(x) \quad \forall x \in \Omega
\end{aligned}
\begin{aligned}
d \mathcal{L}(\Omega;V) & = \int_{\partial\Omega} \left( d(x;\omega_0) + H(x) + \mu - \lambda(x)\psi(x) \right) V(0) \cdot n ds
\end{aligned}
\begin{aligned}
\lambda(x)\psi(x) = 0
\end{aligned}
\begin{aligned}
\lambda(x) \geq 0 \quad \forall x \in\Omega
\end{aligned}
\begin{aligned}
\psi(x) \geq 0 \quad \forall x \in\Omega
\end{aligned}
\begin{aligned}
\int_\Omega 1 dv = \int_{\Omega_0} 1 dv
\end{aligned}
Duals
Implementation
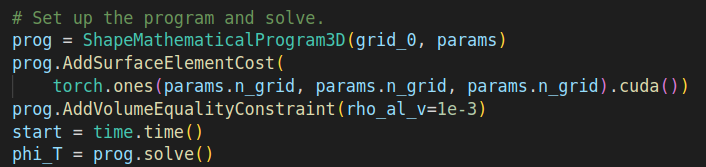
we now have a "ShapeMathematicalProgram" which acts like Drake's MP
Program for mean curvature flow
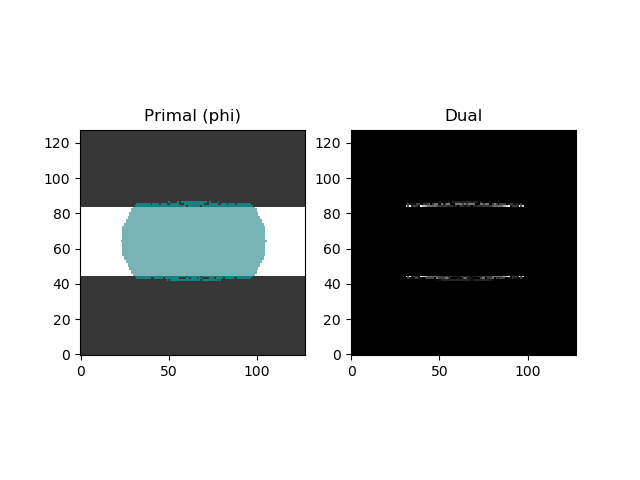
2D Results
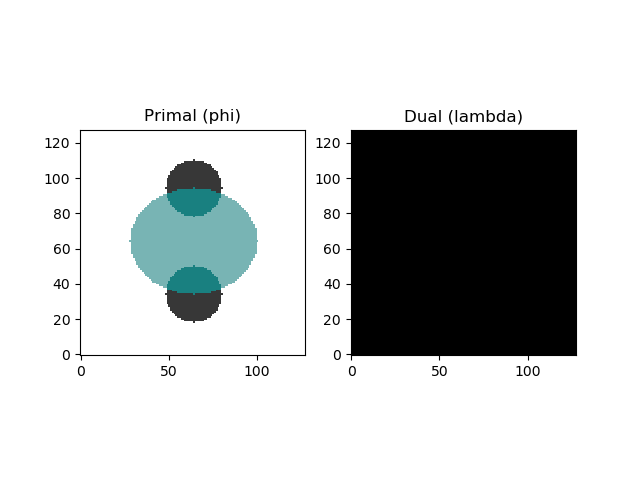
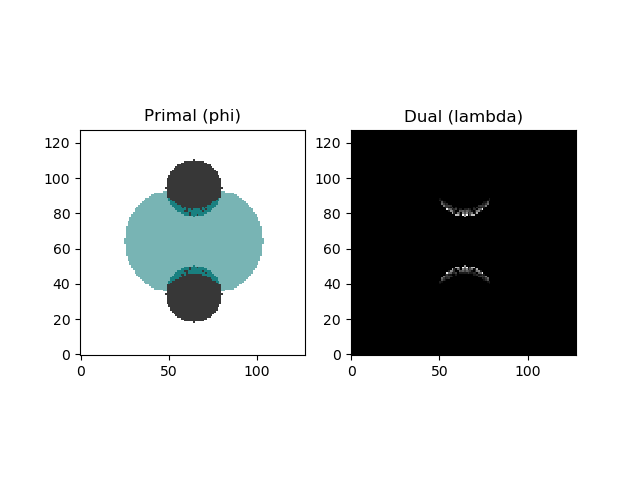
Initial iteration
Final iteration
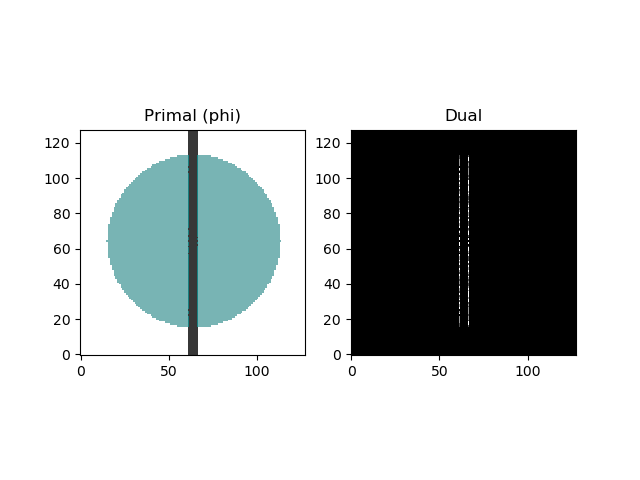
2D Results
2D Results
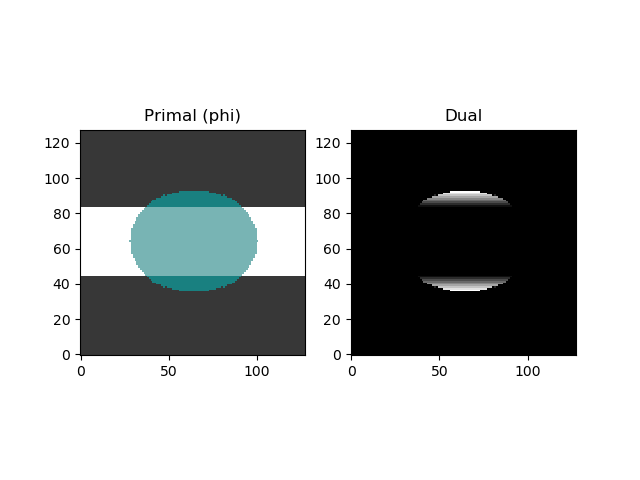
Initial iteration
Final iteration
2D Results
Comparison with PlasticineLab
Real Video
PlasticineLab
Bug / Feature: Slicing

3D Simulation
Next Steps
Simulation side:
Planning side:
Hardware & Experiments:
- More scenarios to try, figure out limitations of this simulation method
- More simulators to set up and compare against - Nvidia PhysX / FleX
-
- Can we do better than MCTS....?
- Can we get a pottery table?
Copy of QuasistaticDeformable
By Terry Suh




