







Clayton Shonkwiler PRO
Mathematician and artist
Jason Cantarella
U. of Georgia
Tetsuo Deguchi
Ochanomizu U.
Erica Uehara
Ochanomizu U.
Funding: Simons Foundation
A linear polymer is a chain of molecular units with free ends.
Polyethylene
Nicole Gordine [CC BY 3.0] from Wikimedia Commons
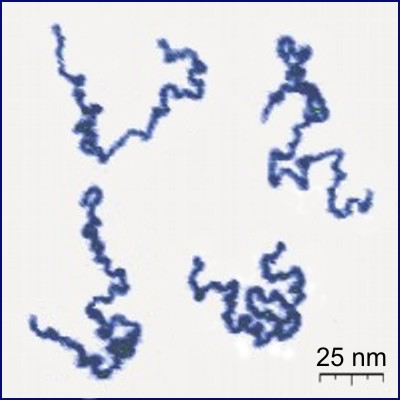
In solution, linear polymers become crumpled:
Protonated P2VP
Roiter–Minko, J. Am. Chem. Soc. 127 (2005), 15688-15689
[CC BY-SA 3.0], from Wikimedia Commons
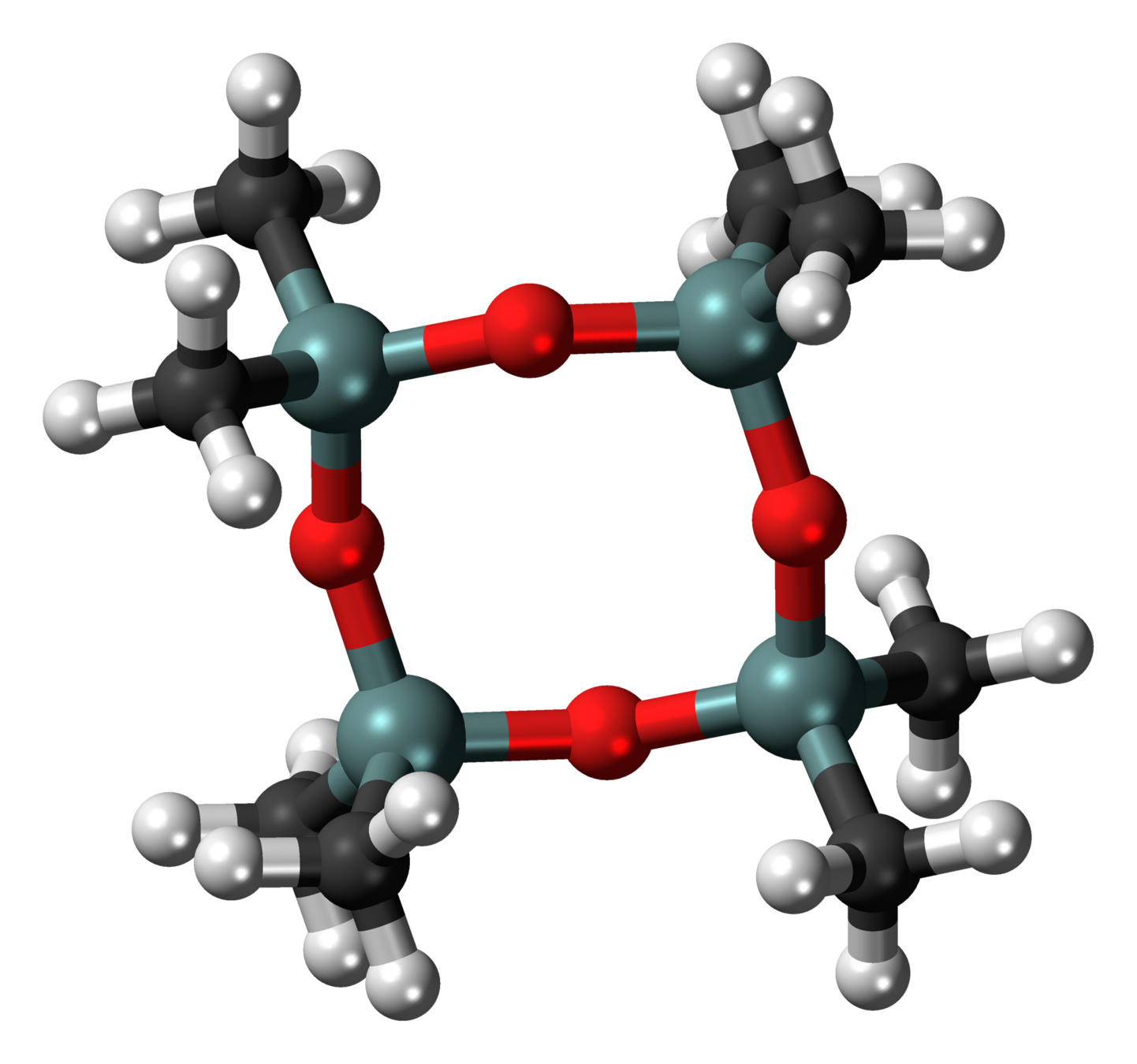
Octamethylcyclotetrasiloxane
(Common in cosmetics, bad for fish)
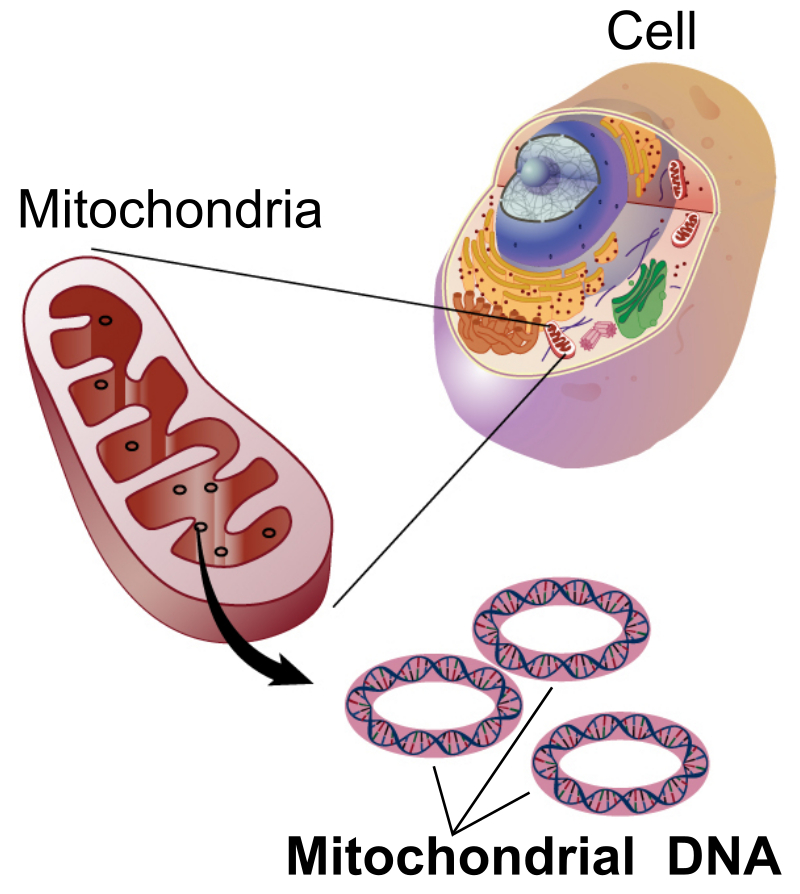
Most known cyclic polymers are biological
Ring polymers have weird properties; e.g.,
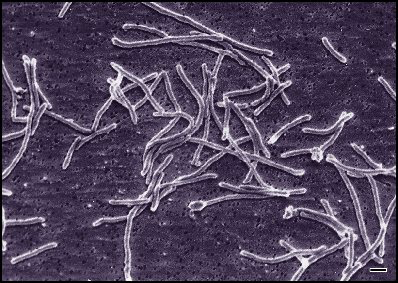
Thermus aquaticus
Uses cyclic archaeol, a heat-resistant lipid
Grand Prismatic Spring
Home of t. aquaticus; 170ºF
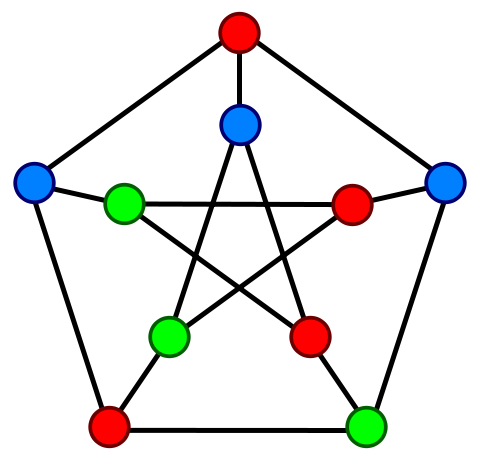
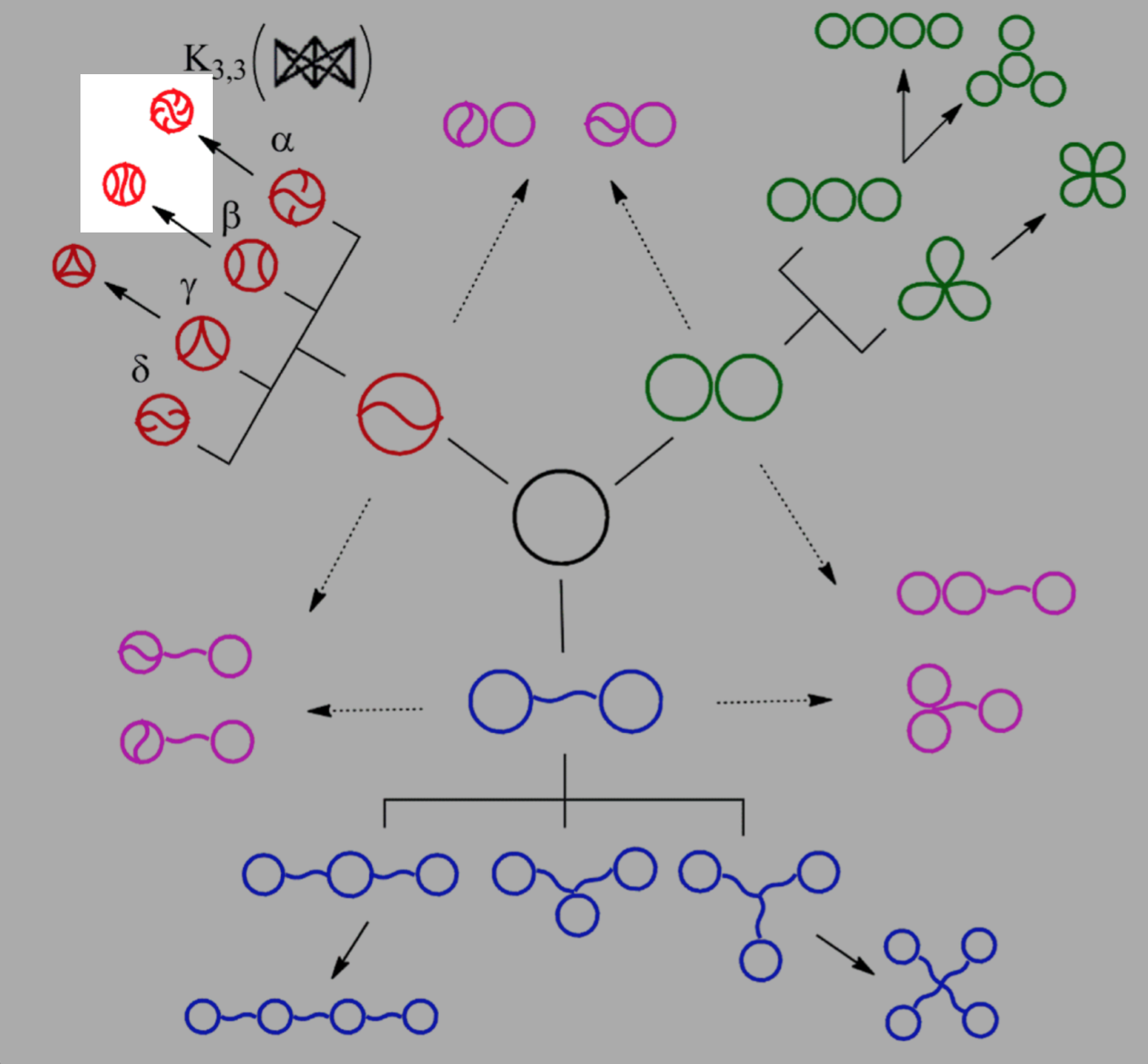
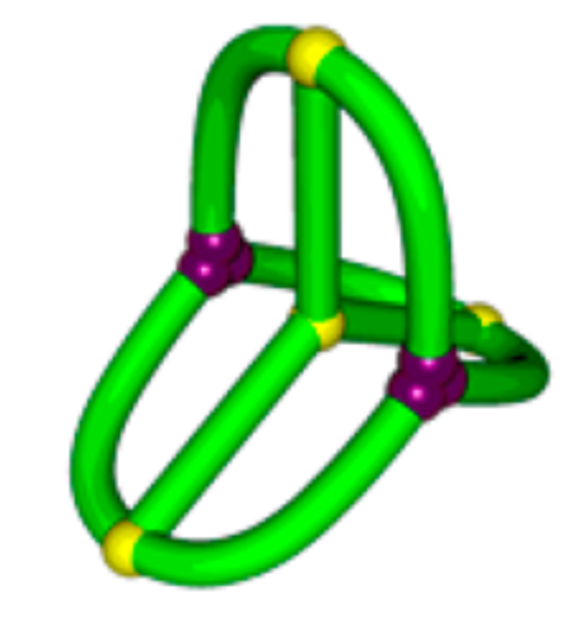
A topological polymer joins monomers in some graph type:
Petersen graph
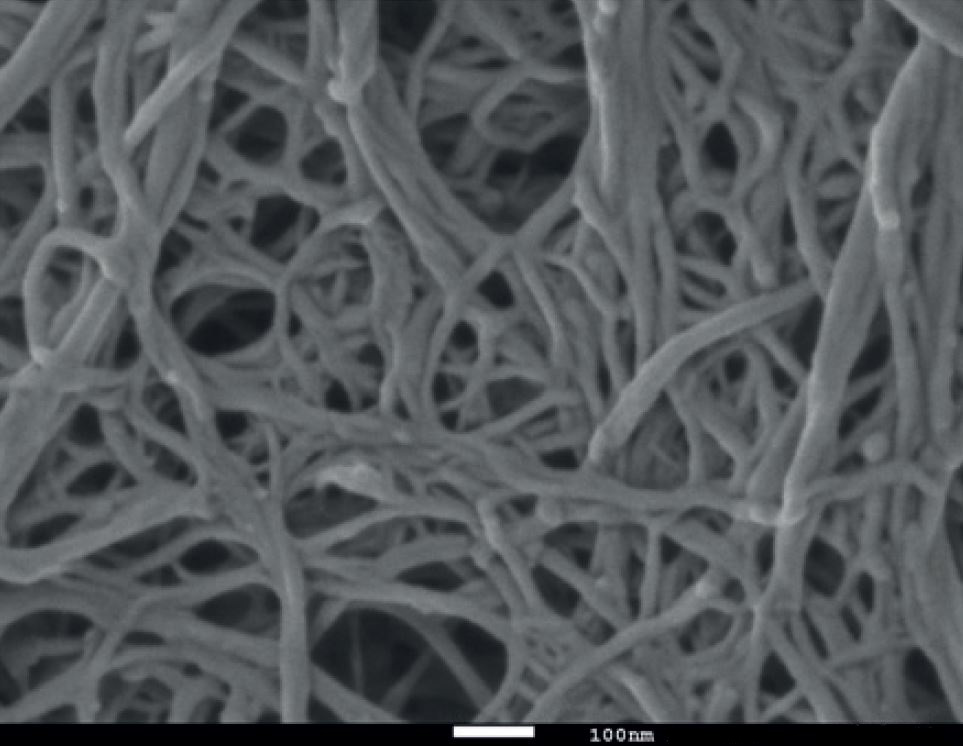
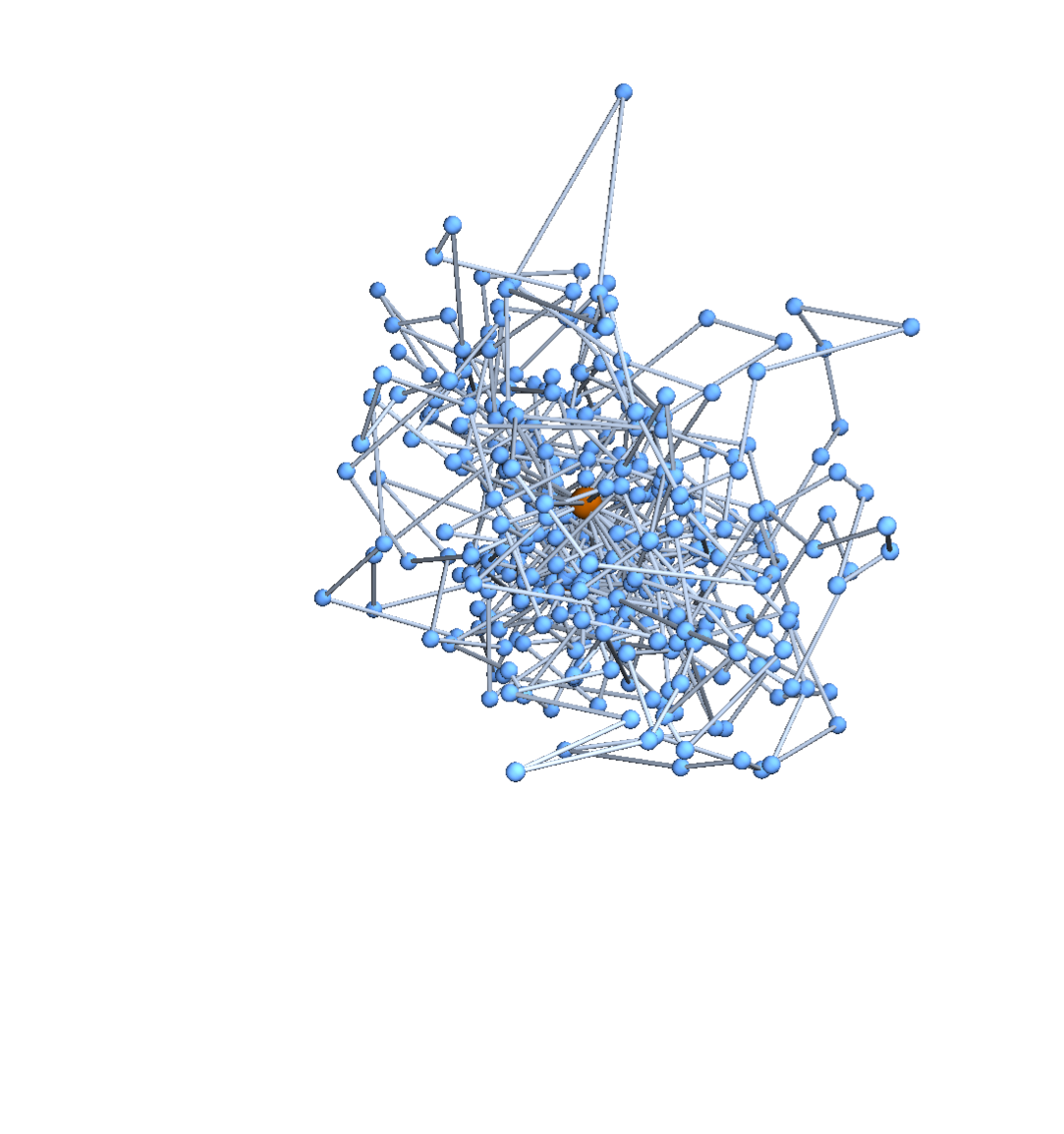
Topological biopolymers have graph types that are extremely complicated (and thought to be random):
Wood-based nanofibrillated cellulose
Qspheroid4 [CC BY-SA 4.0], from Wikimedia Commons
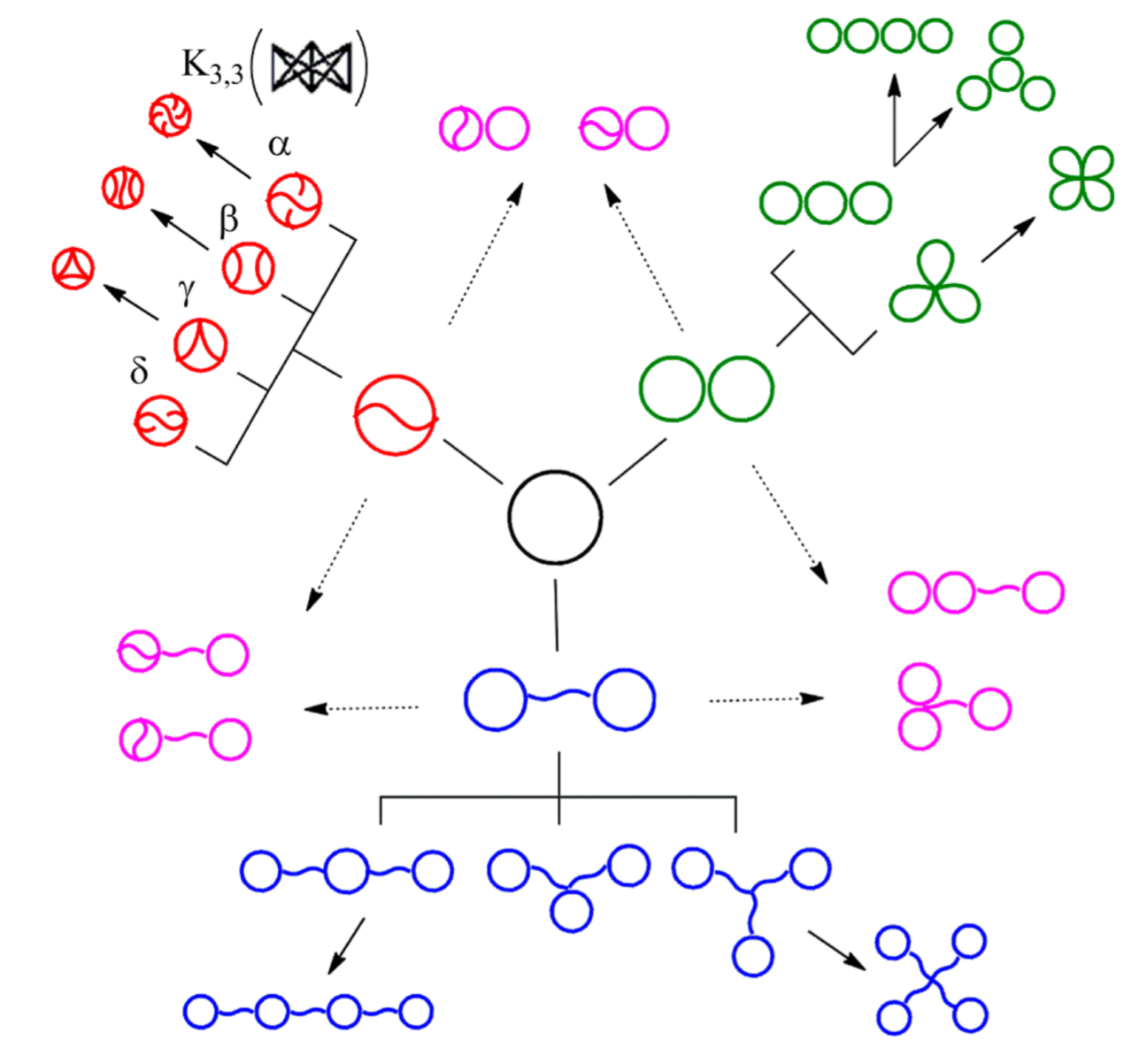
The Tezuka lab in Tokyo can now synthesize many topological polymers in usable quantities
Y. Tezuka, Acc. Chem. Res. 50 (2017), 2661–2672
What is the probability distribution on the shapes of topological polymers in solution?
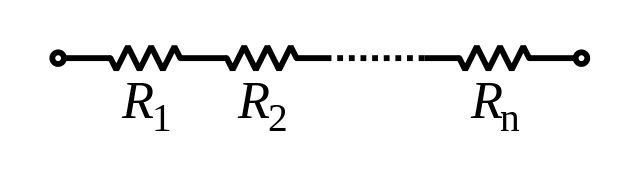
Linear polymers
Ring polymers
Topological polymers
Random walks with independent steps
Random walks with steps conditioned on closure
Random walks with steps conditioned on ???
Suppose \(\mathfrak{G}\) is a directed graph with \(\mathfrak{V}\) vertices and \(\mathfrak{E}\) edges.
Definition. A function on \(\mathfrak{G}\) is a map \(f:\{v_1,\dots , v_\mathfrak{V}\} \to \mathbb{R}\). Functions are vectors in \(\mathbb{R}^\mathfrak{V}\).
Definition. A vector field on \(\mathfrak{G}\) is a map \(w:\{e_1,\dots , e_\mathfrak{E}\} \to \mathbb{R}\). Vector fields are vectors in \(\mathbb{R}^\mathfrak{E}\).
By analogy with vector calculus:
Definition. The gradient of a function \(f\) is the vector field
Definition. The divergence of a vector field \(w\) is the function
So if \(B = \operatorname{div}\), which is \(\mathfrak{V} \times \mathfrak{E}\), then \(\operatorname{grad} = B^T\).
Fact.
The space \(\mathbb{R}^\mathfrak{E}\) of vector fields on \(\mathfrak{G}\) has an orthogonal decomposition
Corollary.
A vector field \(w\) is a gradient (conservative field) if and only if the (signed) sum of \(w\) around every loop in \(\mathfrak{G}\) vanishes.
Definition.
A function \(f:\{v_i\} \to \mathbb{R}^d\) determines an embedding of \(\mathfrak{G}\) into \(\mathbb{R}^d\). The displacement vectors between adjacent vertices are given by \(\operatorname{grad}f\).
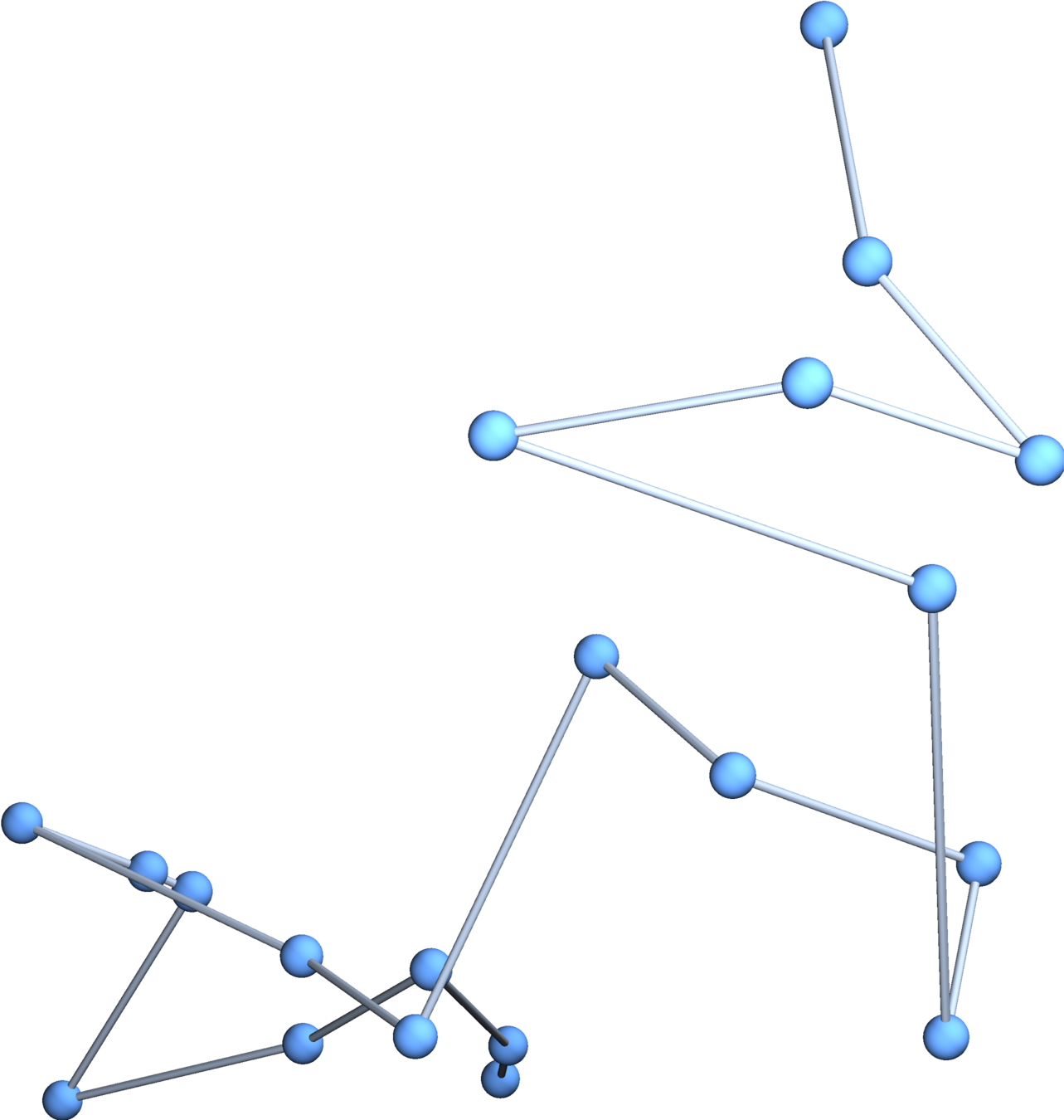
A Gaussian random embedding of \(\mathfrak{G}\) has displacements sampled from a standard multivariate Gaussian on \((\text{gradient fields})^d\subset \left(\mathbb{R}^\mathfrak{E}\right)^d\).
Lemma. The projections of a Gaussian random embedding of \(\mathfrak{G}\) in \(\mathbb{R}^d\) onto each coordinate axis are independent Gaussian random embeddings of \(\mathfrak{G}\) into \(\mathbb{R}\).
So we can restrict to Gaussian embeddings of \(\mathfrak{G}\) in \(\mathbb{R}\).
Since \(\operatorname{grad}f=0 \,\Longleftrightarrow f\) is a constant function, \(\operatorname{grad}f\) only determines \(f\) up to a constant. So assume our random embeddings are centered; i.e., \(\sum f(v_i) = 0\).
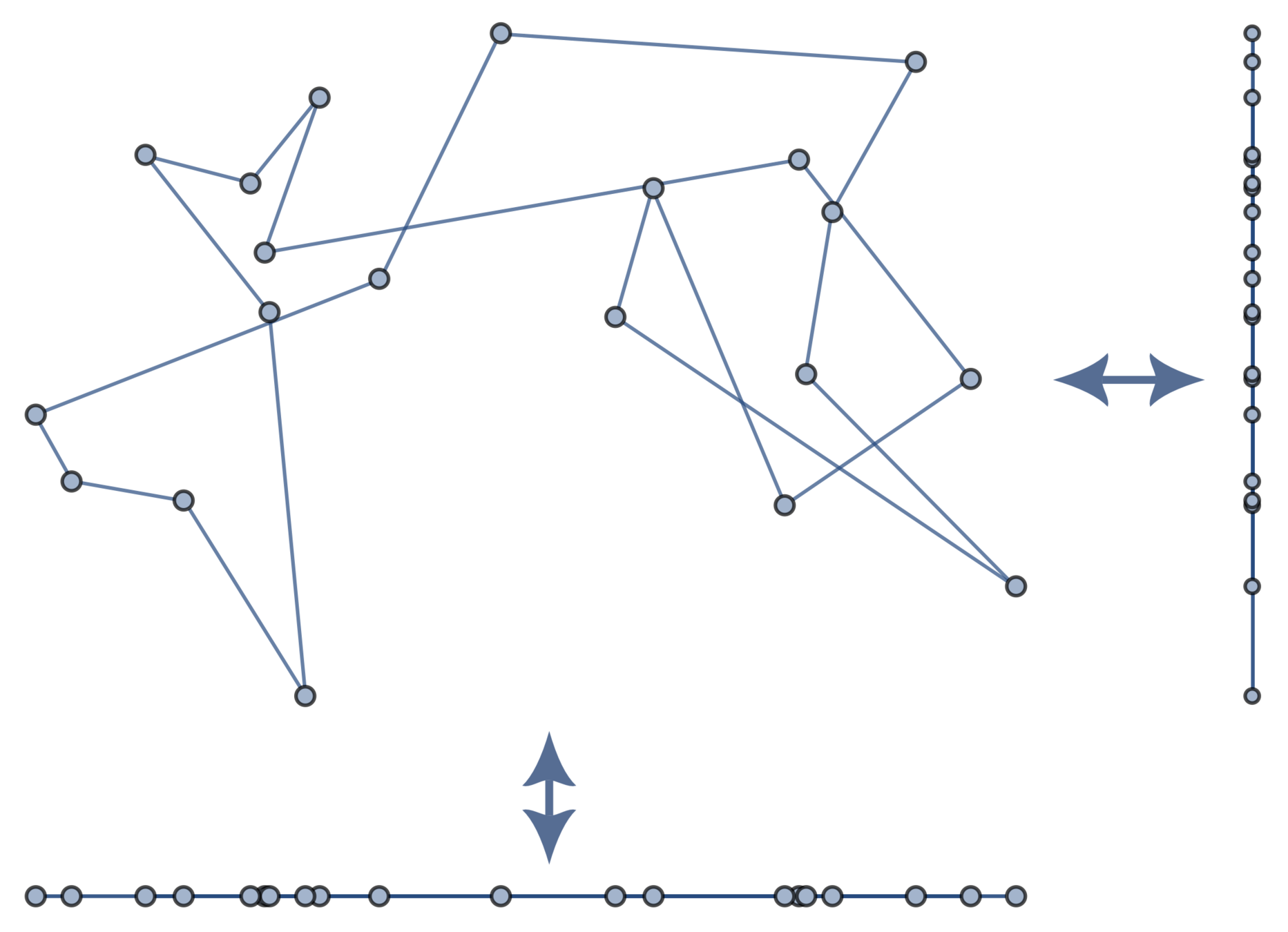
Theorem [w/ CDU; cf. James, 1947]
The distribution of vertex positions on the \((\mathfrak{V}-1)\)-dimensional subspace of centered embeddings is
\(BB^T = \operatorname{div}\operatorname{grad} = L \) is the graph Laplacian
For symmetric matrices like \(L \), with eigenvalues \(\lambda_i\) and eigenvectors \(v_i\), the pseudoinverse \(L^+\) is the symmetric matrix defined by:
Algorithm.
Theorem [w/ CDU; cf. James, 1947]
The distribution of vertex positions on the \((\mathfrak{V}-1)\)-dimensional subspace of centered embeddings is
Corollary.
The expected squared distance between vertex \(i\) and vertex \(j\) is
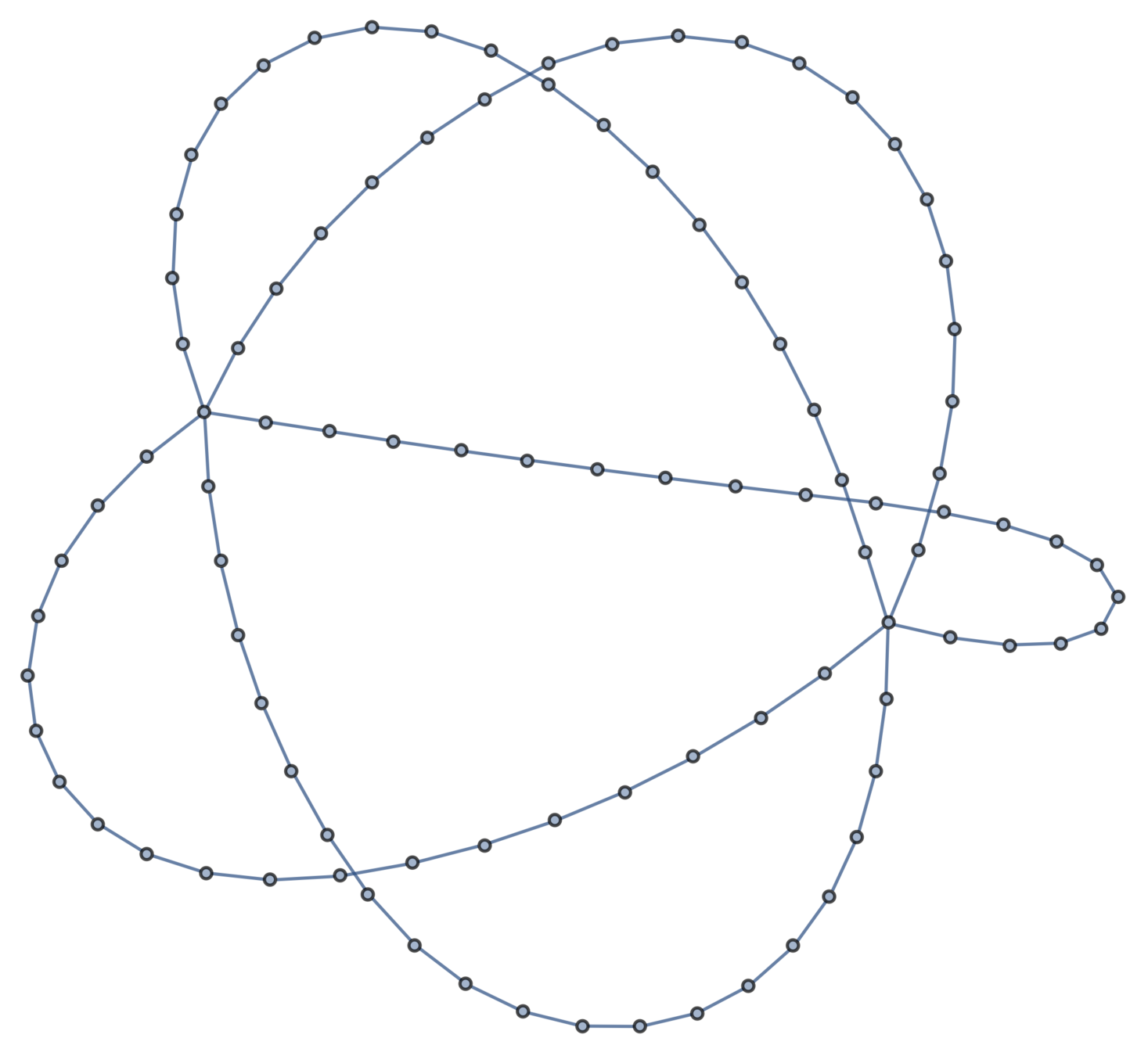
Definition.
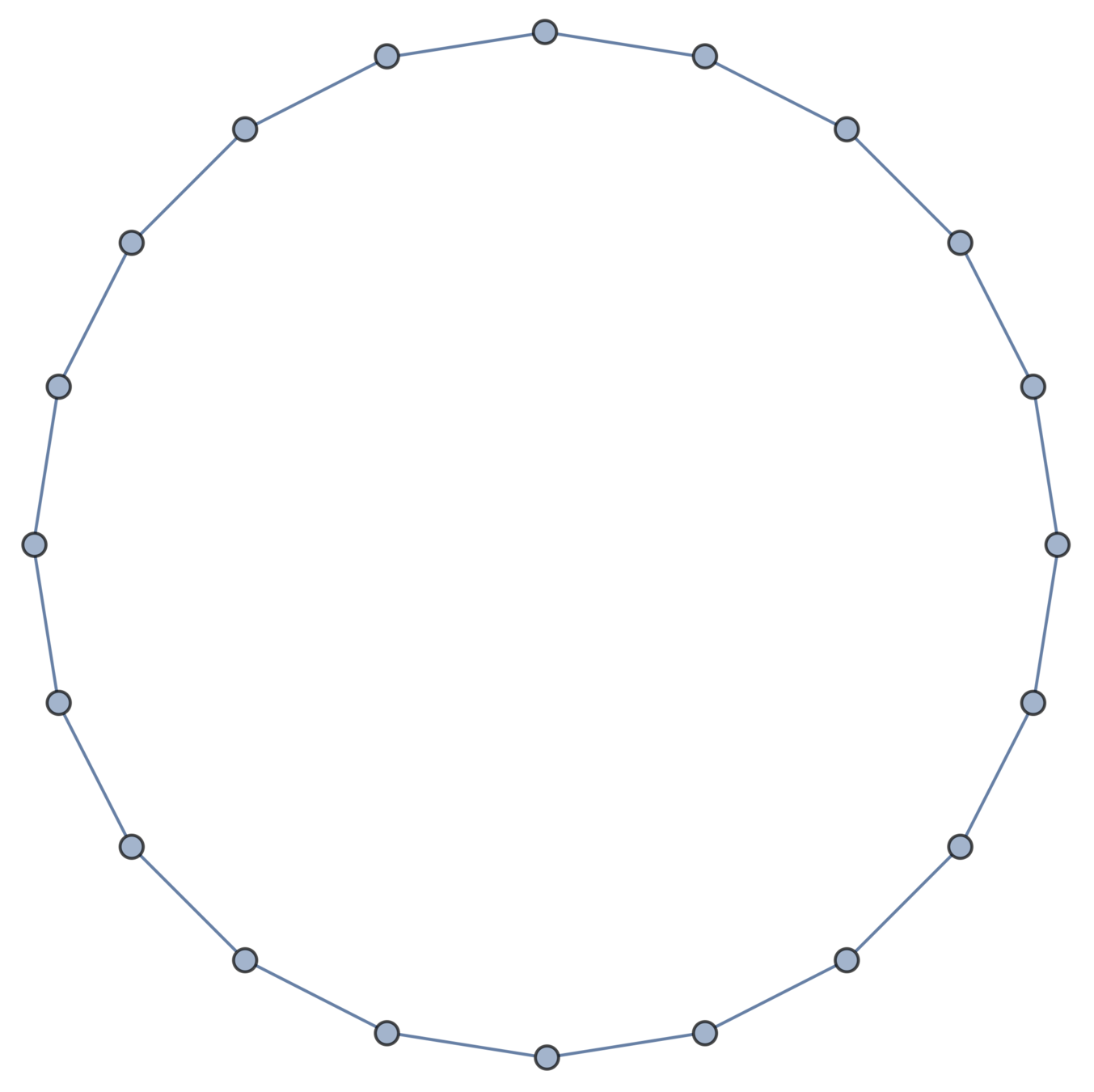
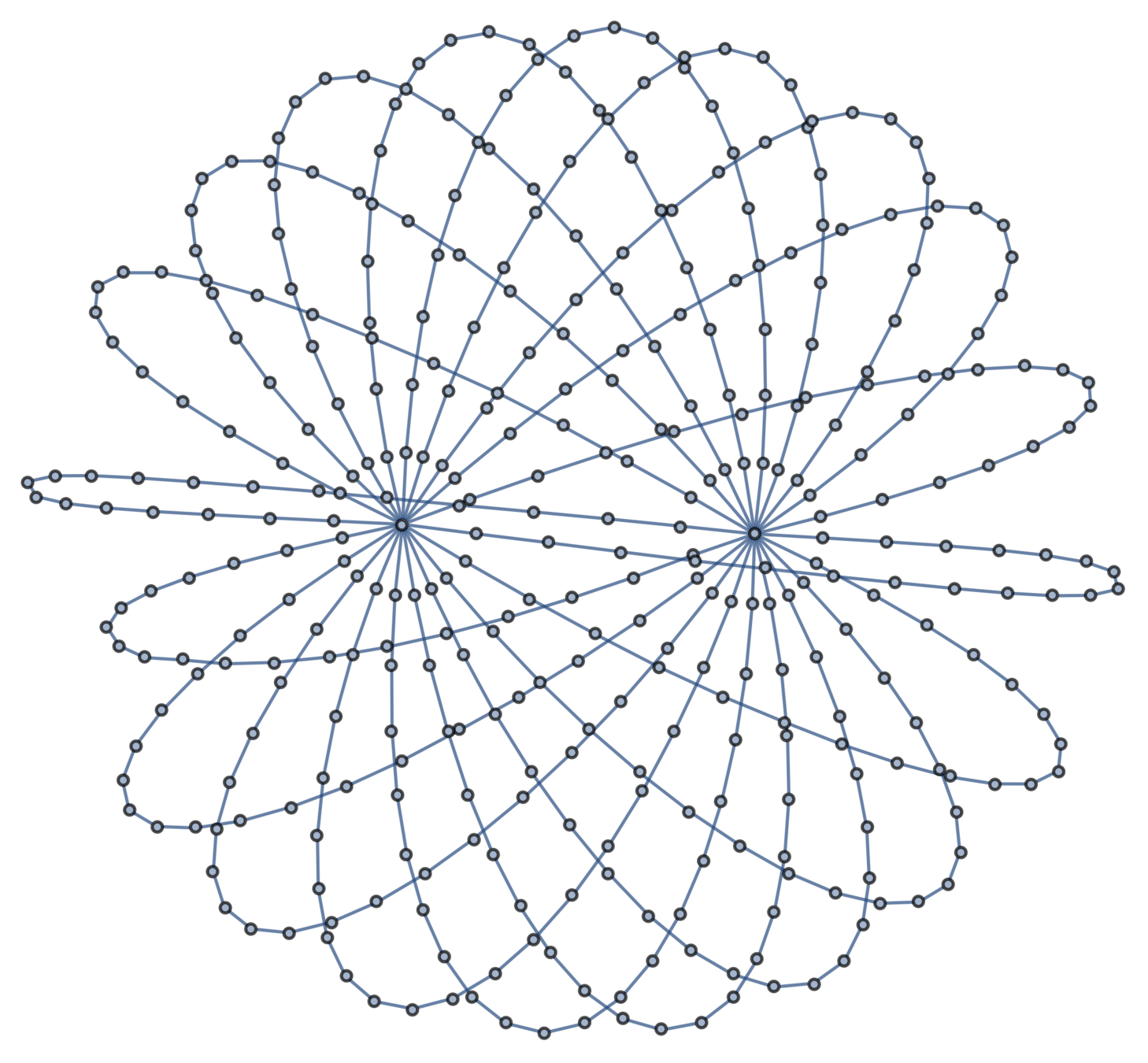
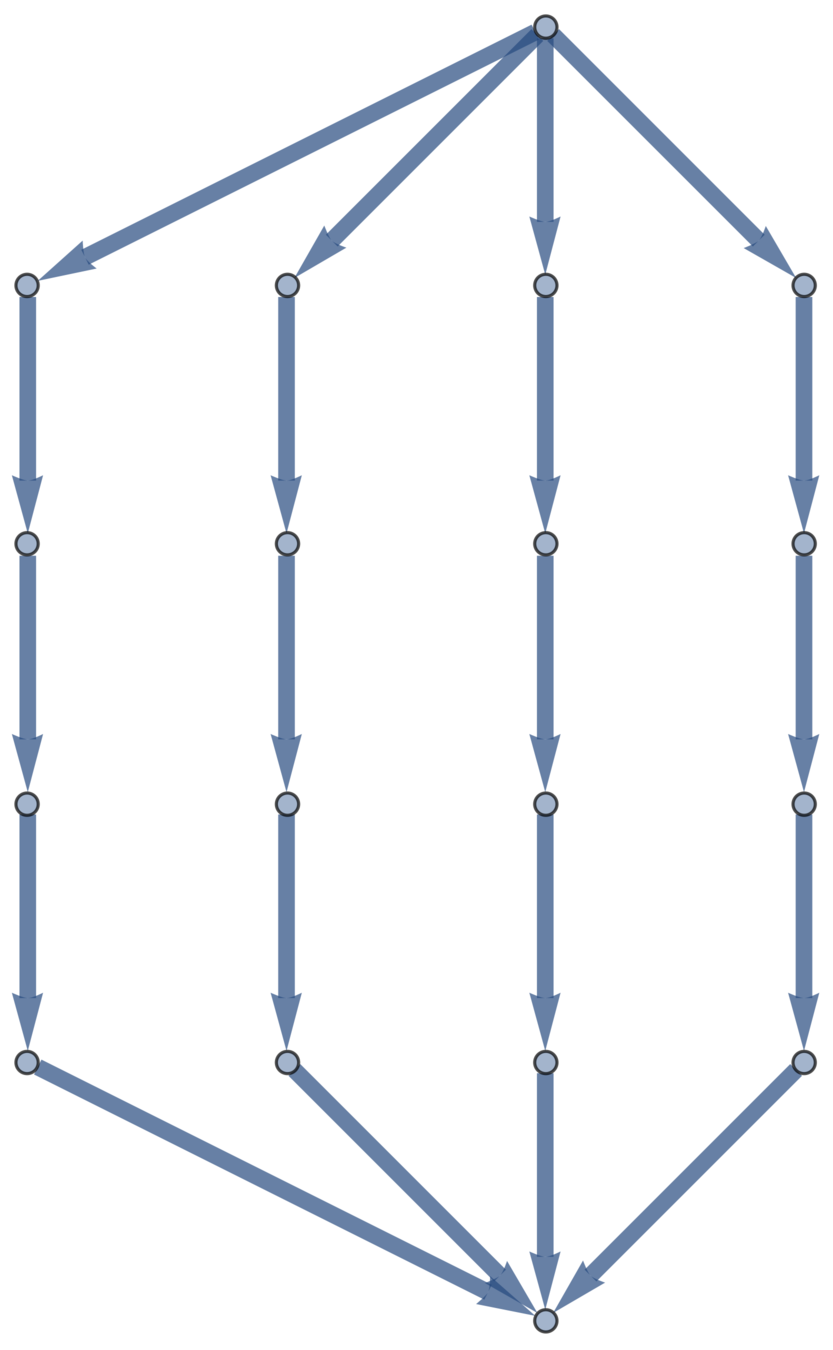
An \((m,n)\)-theta graph consists of \(m\) arcs of \(n\) edges connecting two junctions.
\((5,20)\)-theta graph
Theorem [Deguchi–Uehara, 2017]
The expected squared distance between junctions is \(\frac{dn}{m}\).
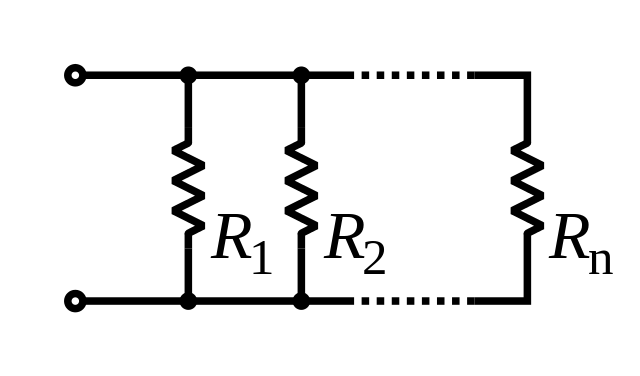
Proposition [Nash–Williams (resistors, 1960s), James (springs, 1947)]
The expression \(L_{ii}^++L_{jj}^+-L_{ij}^+-L_{ji}^+\) is:
Randall Munro, [CC BY-NC 2.5], from xkcd
Theorem [w/ CDU; cf. Estrada–Hatano, 2010]
If \(\lambda_i\) are the eigenvalues of \(L\), the expected squared radius of gyration of a Gaussian random embedding of \(\mathfrak{G}\) in \(\mathbb{R}^d\) is
This quantity is called the Kirchhoff index of \(\mathfrak{G}\).
Y. Tezuka, Acc. Chem. Res. 50 (2017), 2661–2672
T. Suzuki et al., J. Am. Chem. Soc. 136 (2014), 10148–10155
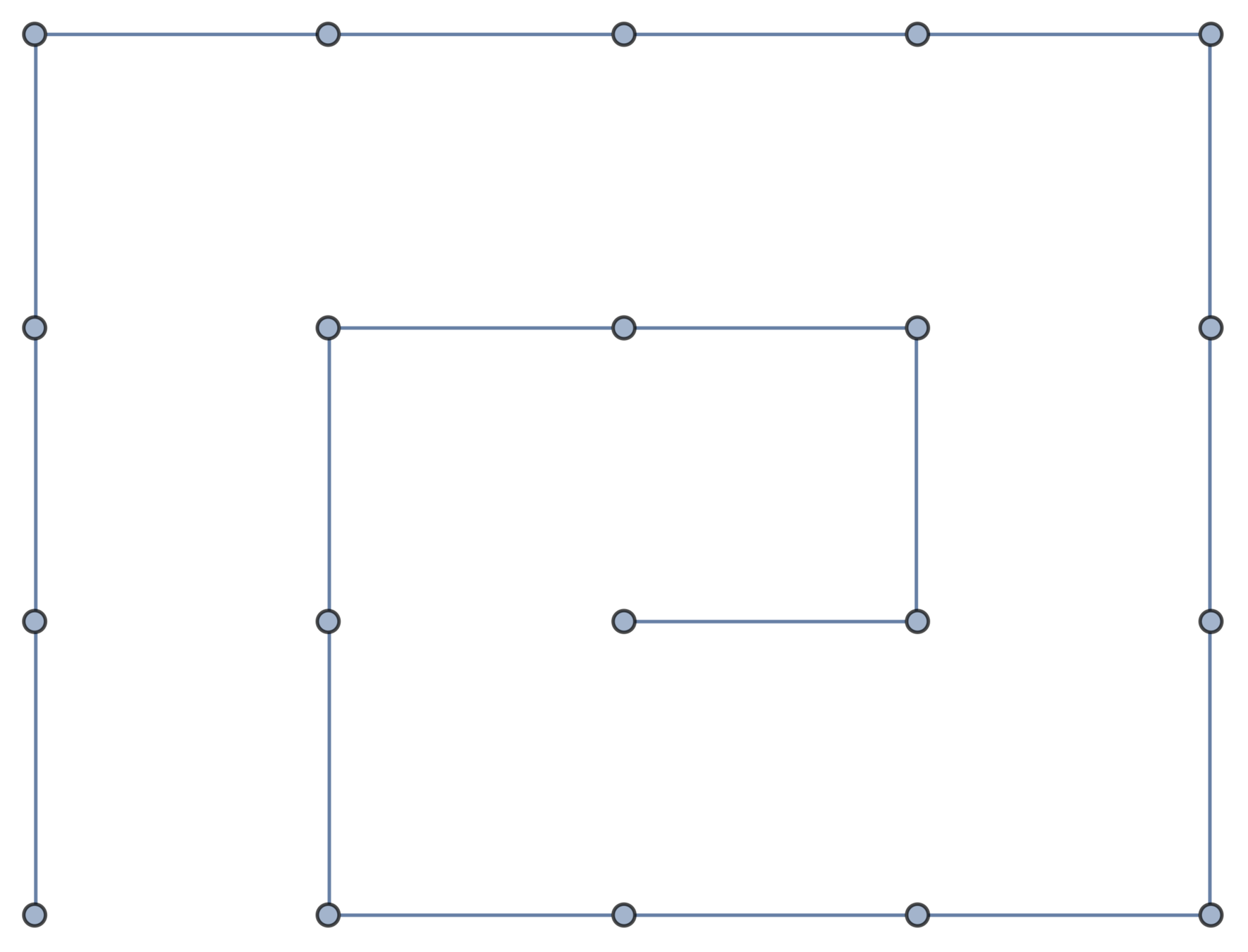
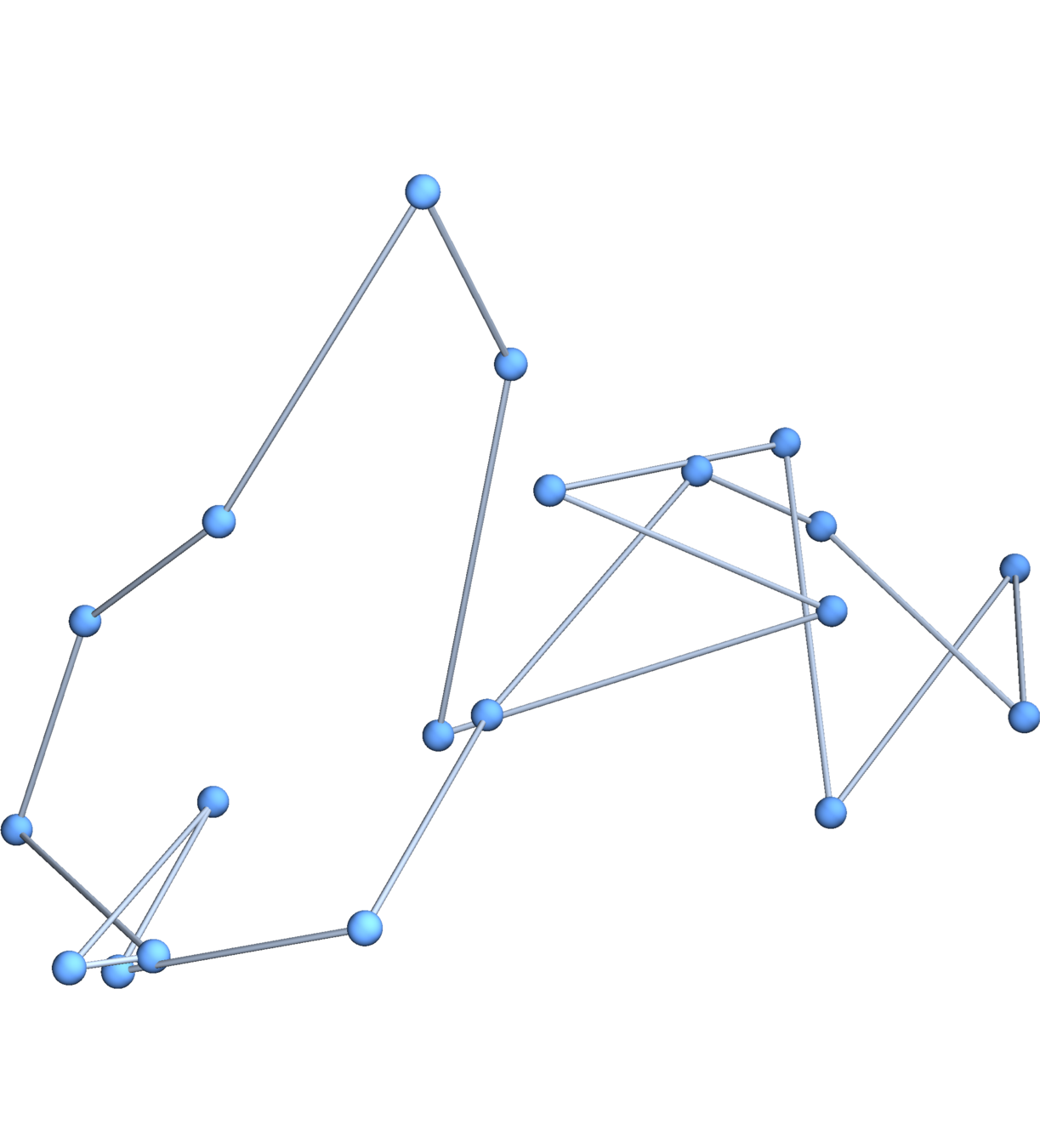
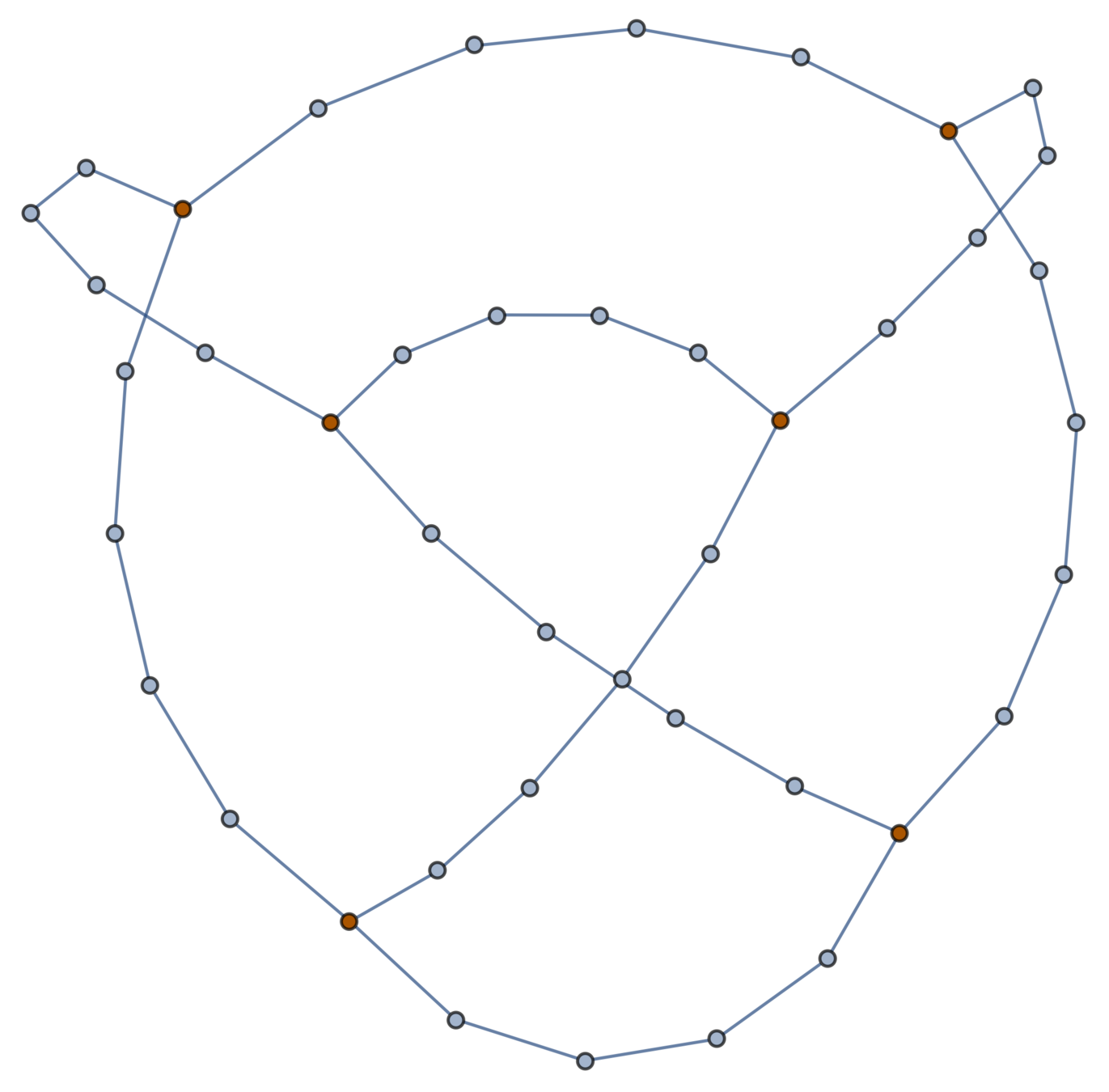
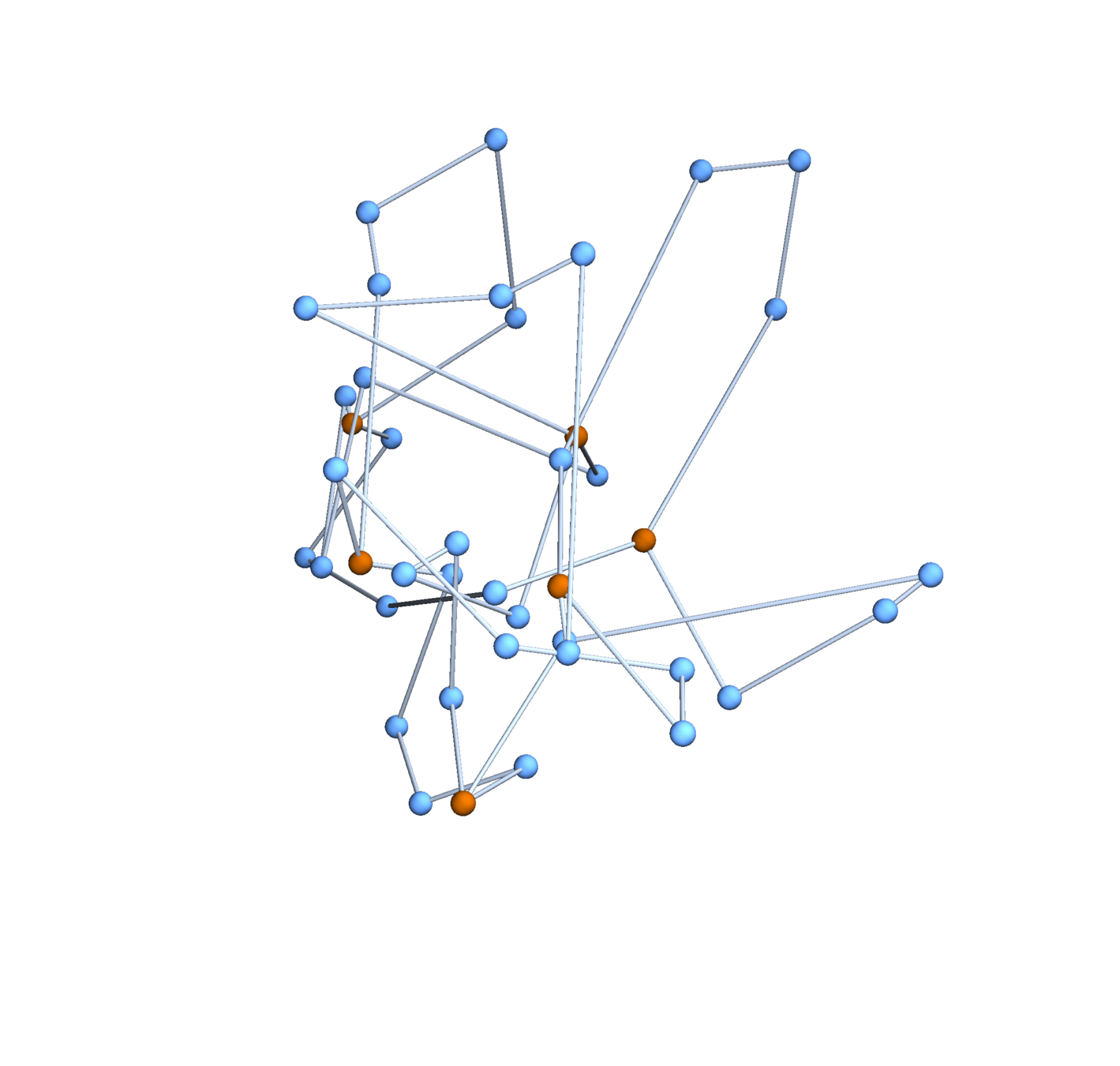
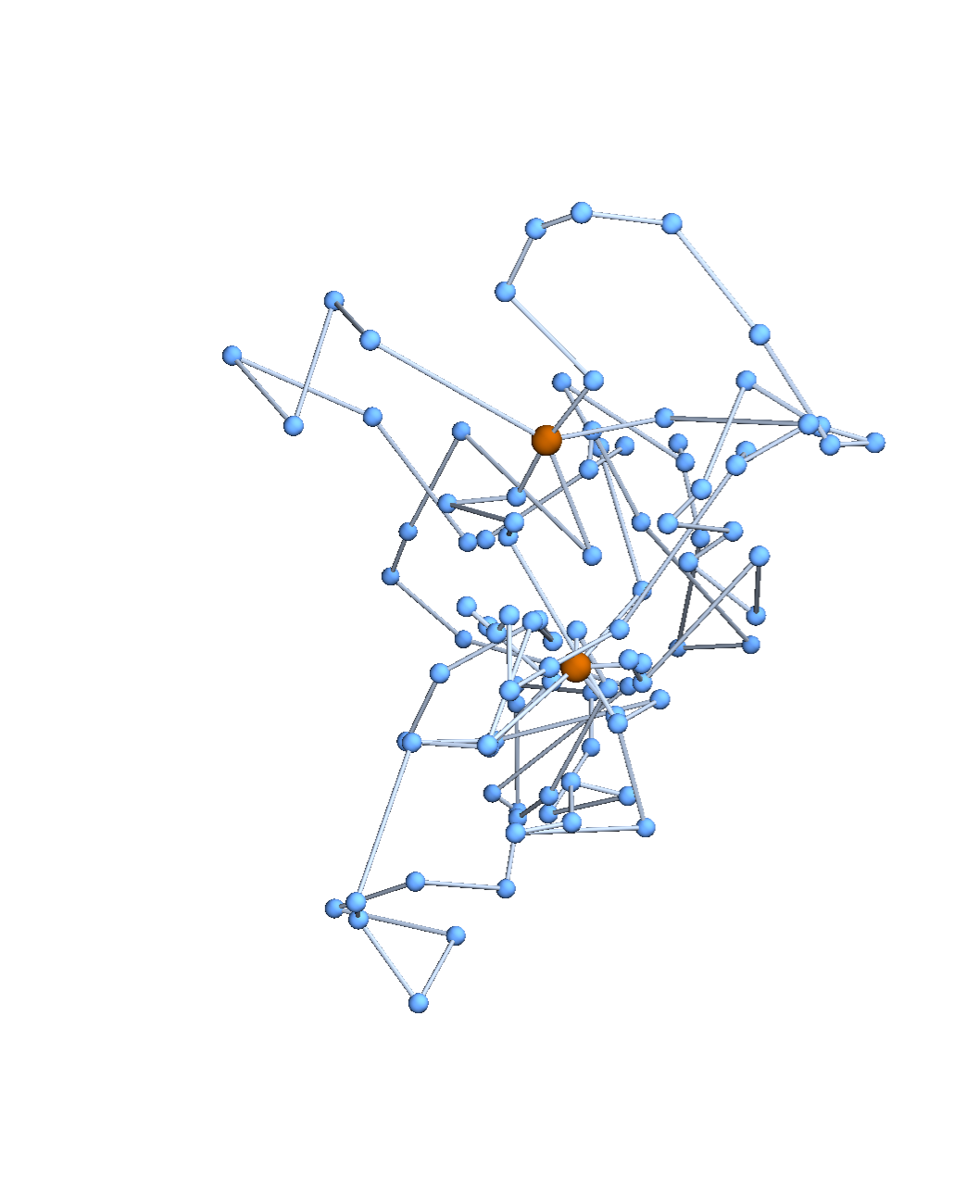
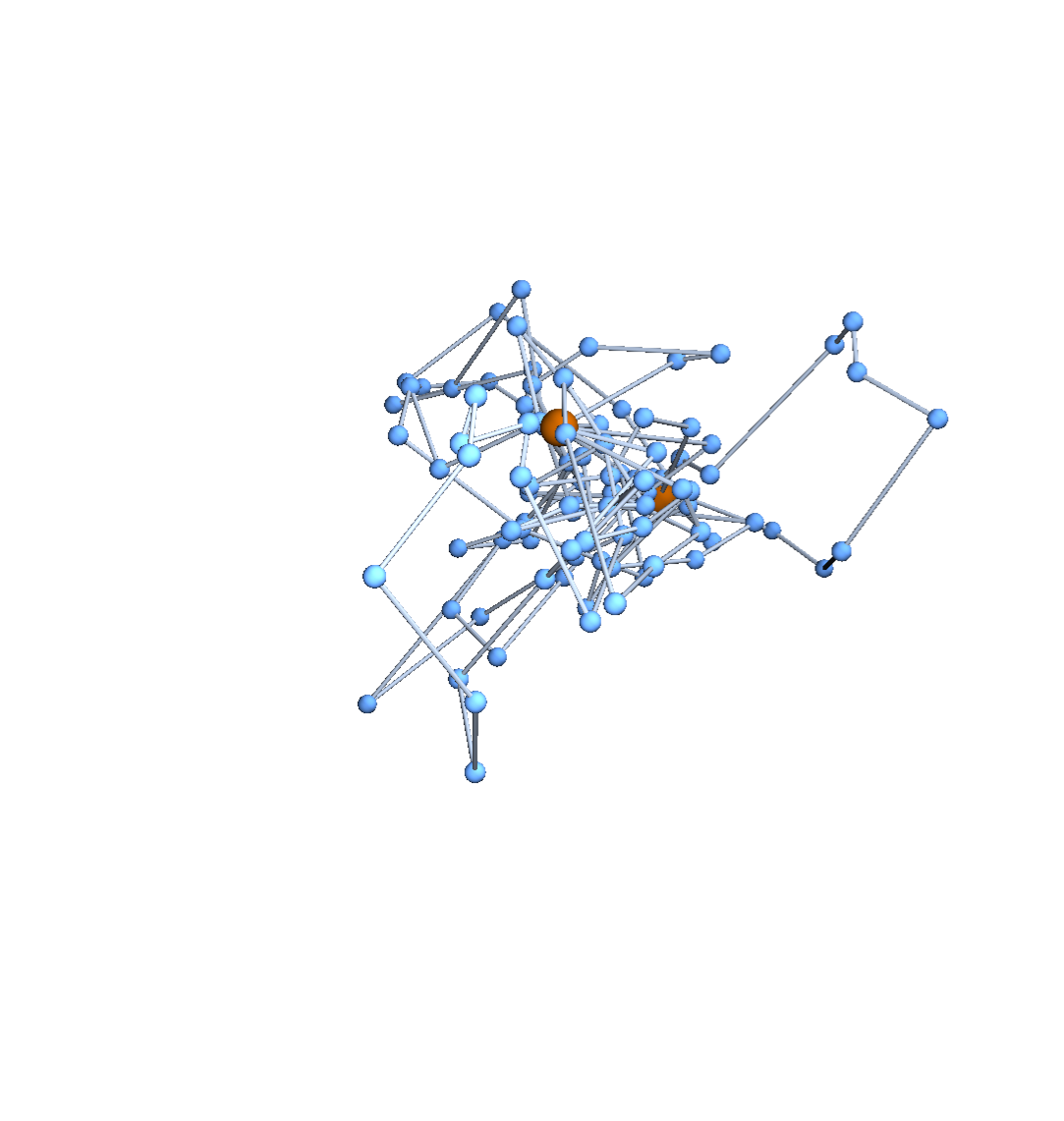
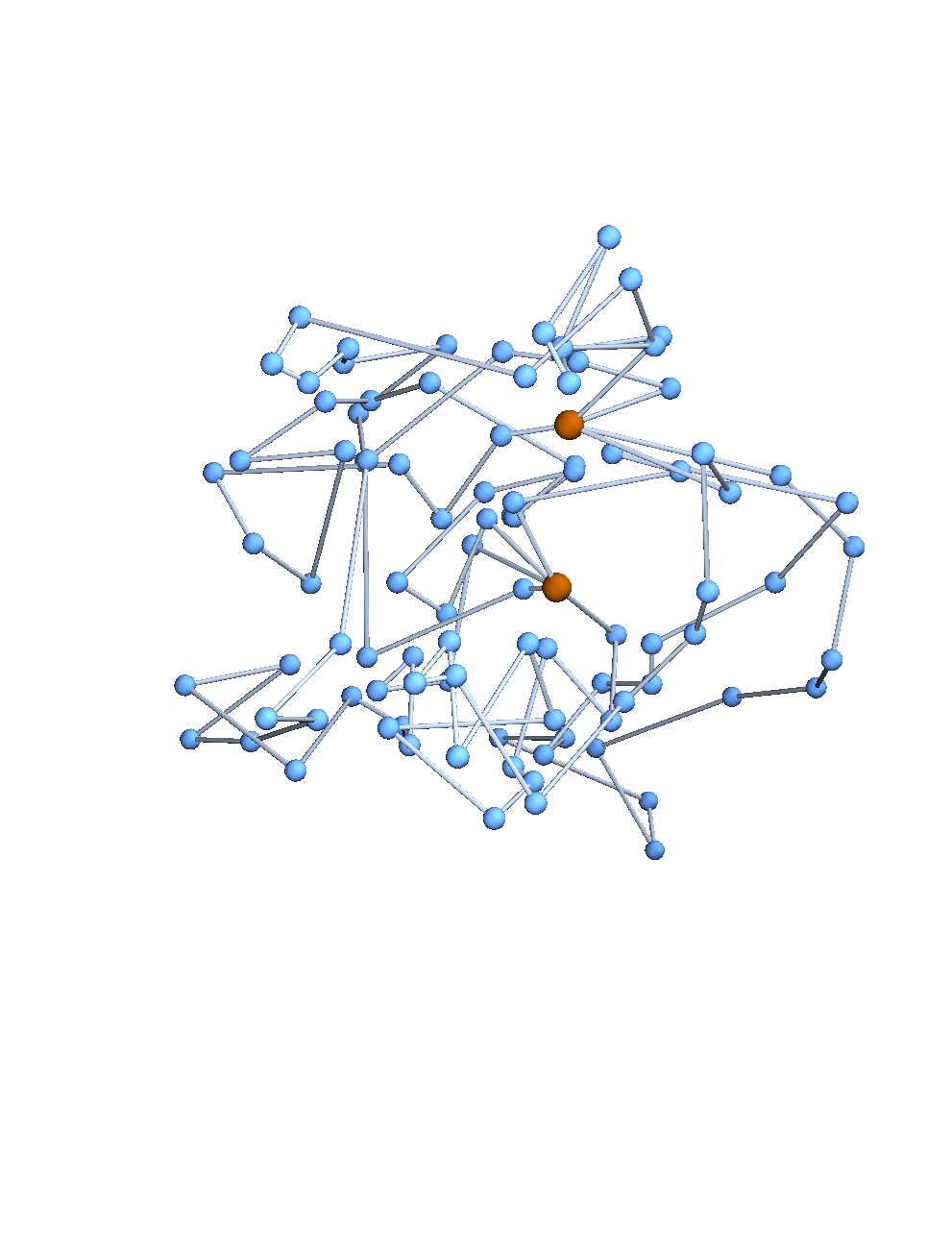
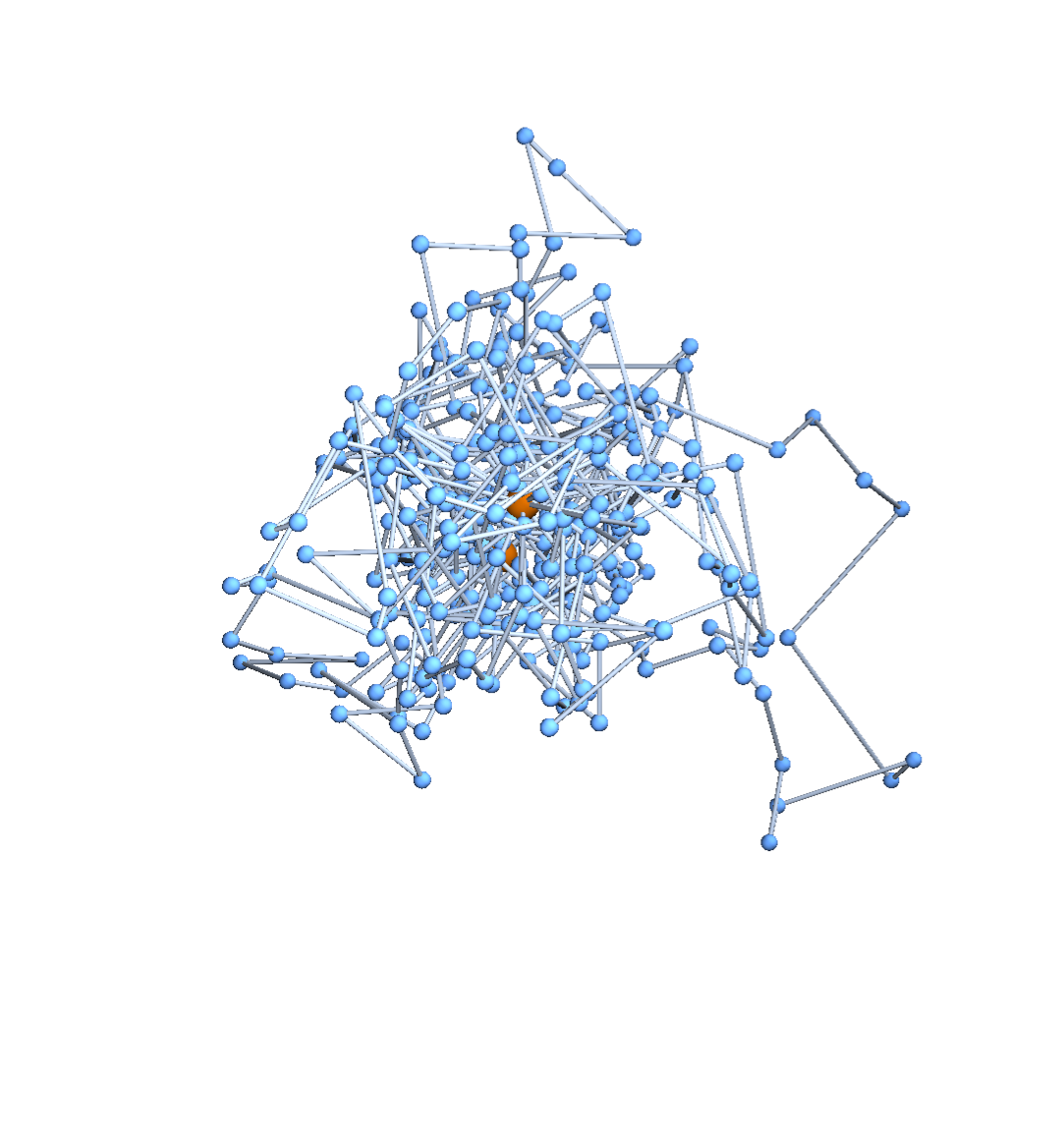
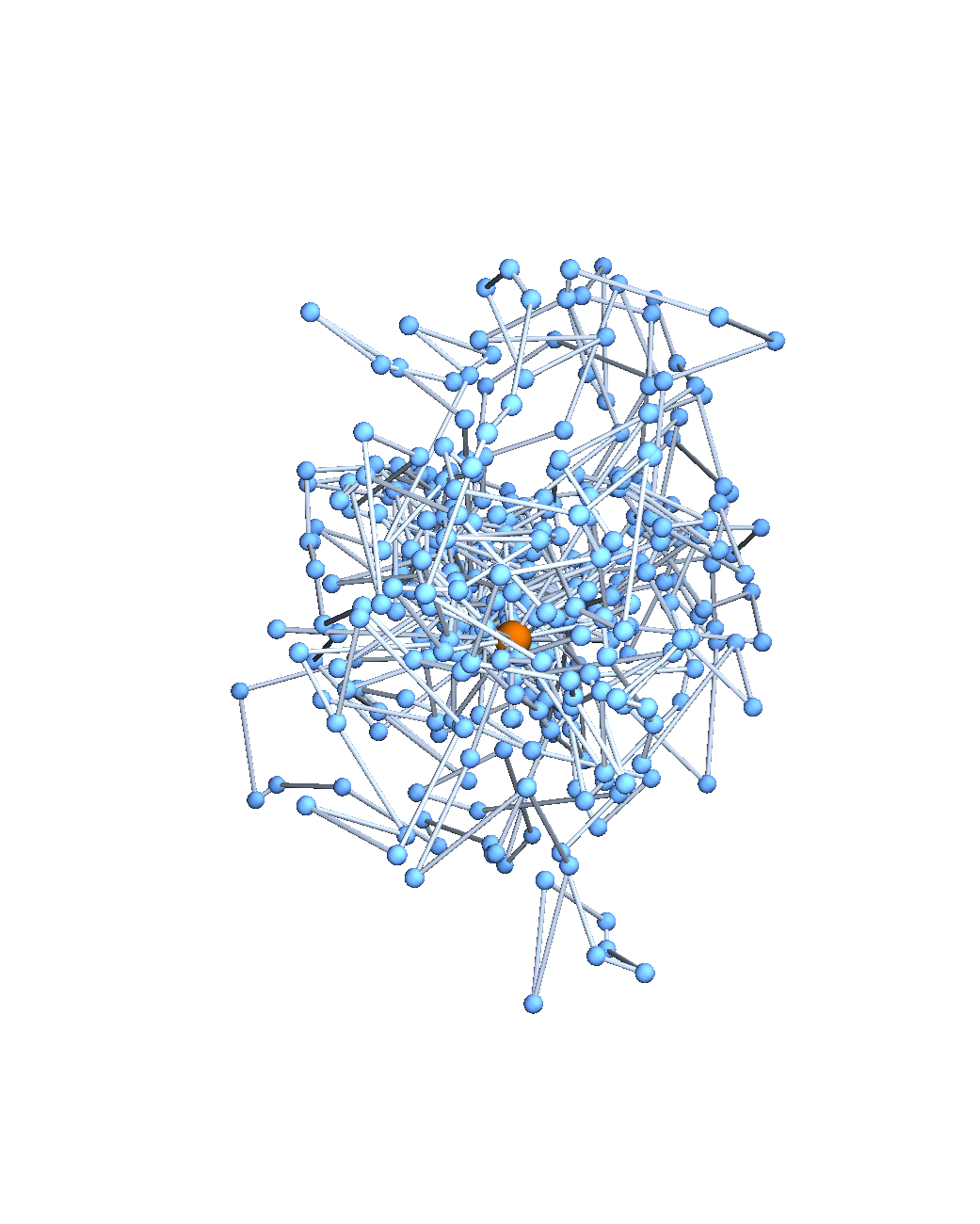
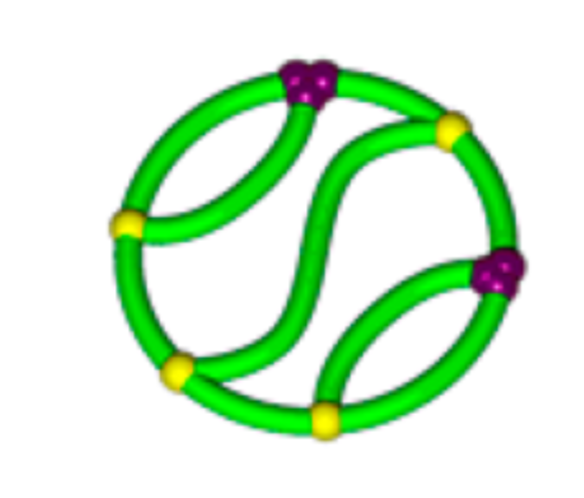
\(K_{3,3}\) (subdivided)
ladder graph (subdivided)
Topological polymers
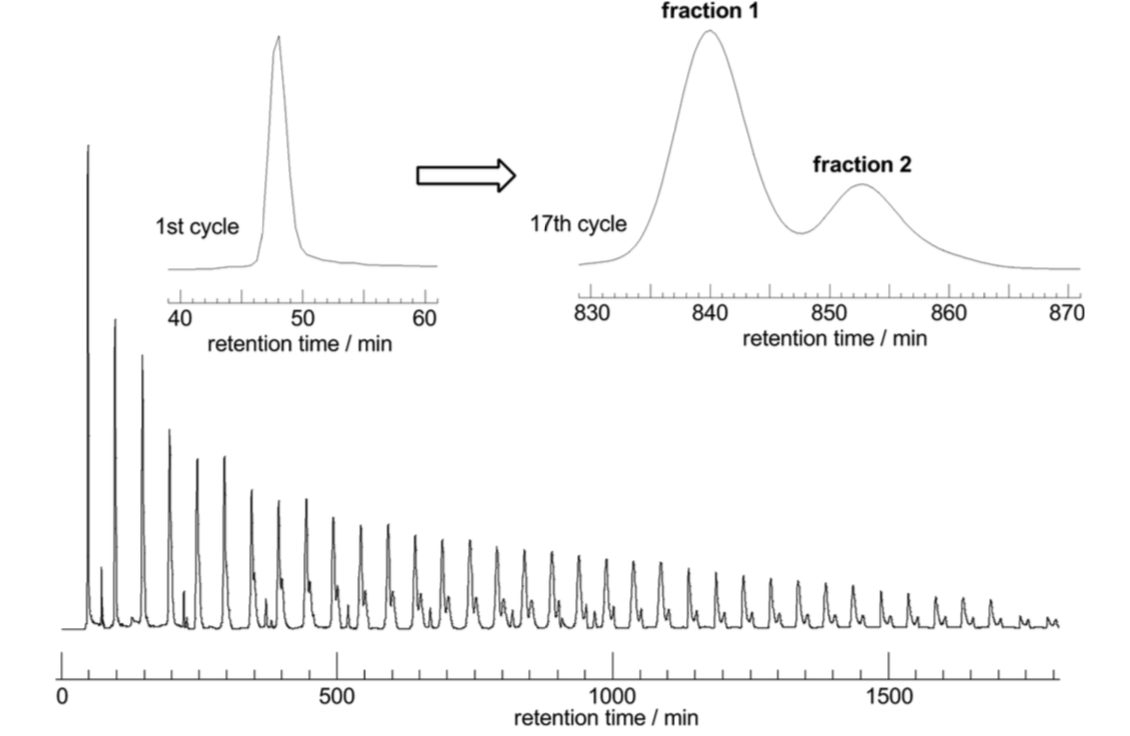
Size exclusion chromatograph
T. Suzuki et al., J. Am. Chem. Soc. 136 (2014), 10148–10155
larger molecule
smaller molecule
Proposition [with Cantarella, Deguchi, & Uehara]
If each edge is subdivided equally to make \(\mathfrak{V}\) vertices total:
So the smaller molecule is predicted to be \(K_{3,3}\)!
By Clayton Shonkwiler




