Metaptics
Perception
& Stimulation
Vibro-Tactile

Équipe
Interactions Multi-Échelles
L’interaction de l’Homme avec des environnements physiques ou numériques par le développement de dispositifs matériels et des logiciels idoines pour rendre accessibles, perceptibles et manipulables les espaces intangibles comme le micromonde ou l’information brute.
L’haptique, la visualisation, la réalité virtuelle et augmentée en complément des systèmes robotiques pour concevoir et développer des interfaces plus efficaces, plus transparentes et plus adaptées, pour favoriser la cognition et la prise de décision de l’opérateur.
Meilleure compréhension du comportement humain et de l'environnement en s'intéressant aux modalités d’action, de perception et de commande à des échelles différentes allant de l’atelier intelligent et du bureau numérique jusqu’à la micromanipulation.
7 chercheurs permanents + 15 Doctorants + 2 Post-Doc/Ingé
Interfaces Haptiques et Tangibles
- Conception mécatronique des dispositifs à retour de forces
- Surfaces tactiles
Interaction Humain - Machine
- Techniques d'interaction pour l’expertisation et la prise de décision
- Interfaces graphiques (station de bureau, smartphone, table tactile)
- Environnements virtuels tangibles
Etudes psychophysiqes
- Perception multimodale
- Transfert et acquisition des compétences
- Acceptance des nouvelles technologies
Robotique multi-échelles
- Commande et controle haute précision
- Capteurs, acquisition et caractérisation
David Gueorguiev


Sinan Haliyo
Gilles Bailly

Thomas Daunizeau
Vincent Hayward


Lionel Obadia
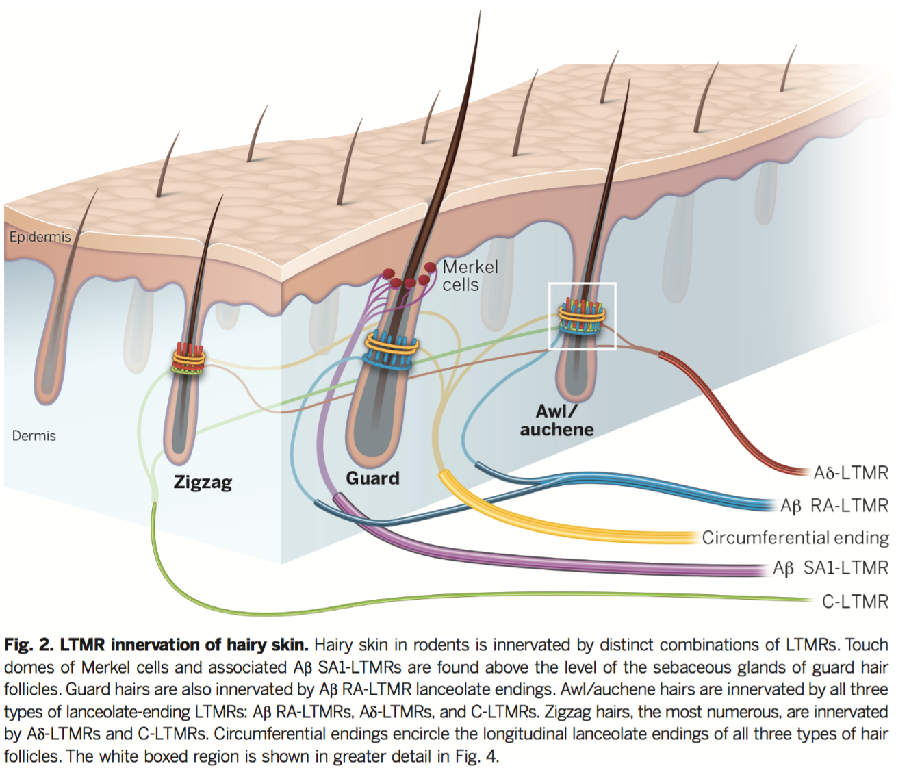
Perception Tactile
La peau est notre plus grand organe sensoriel
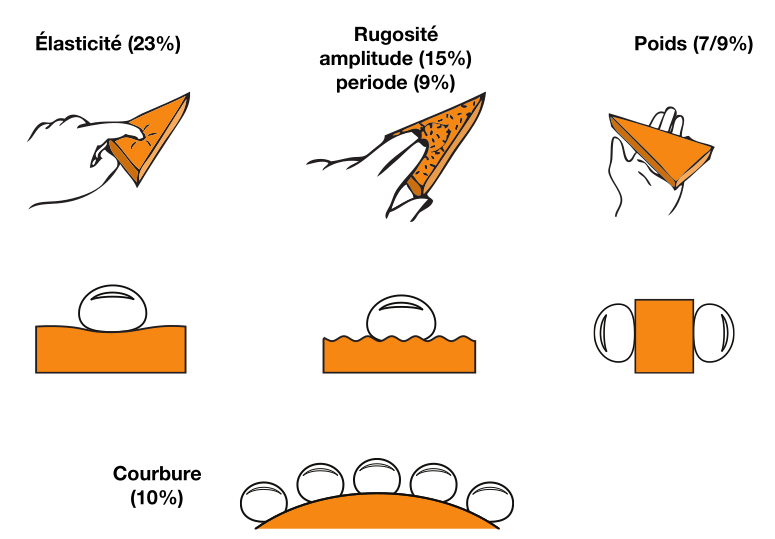
Mécanique du toucher
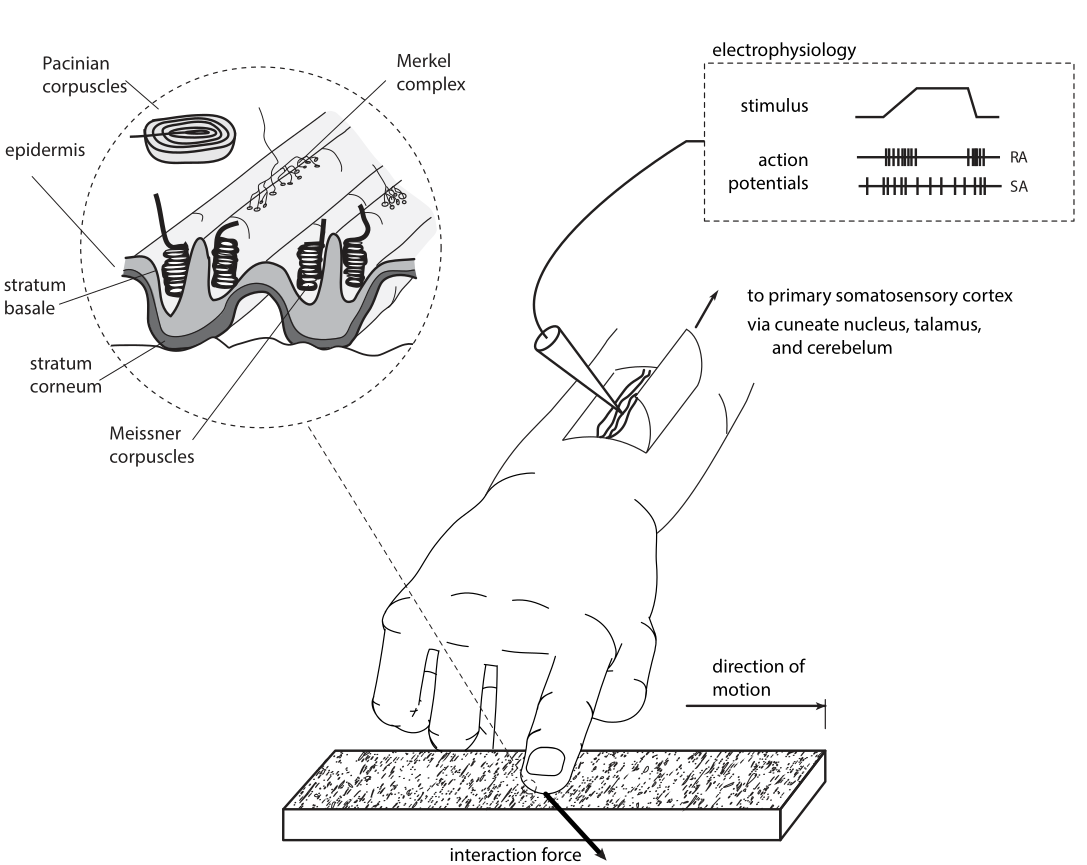
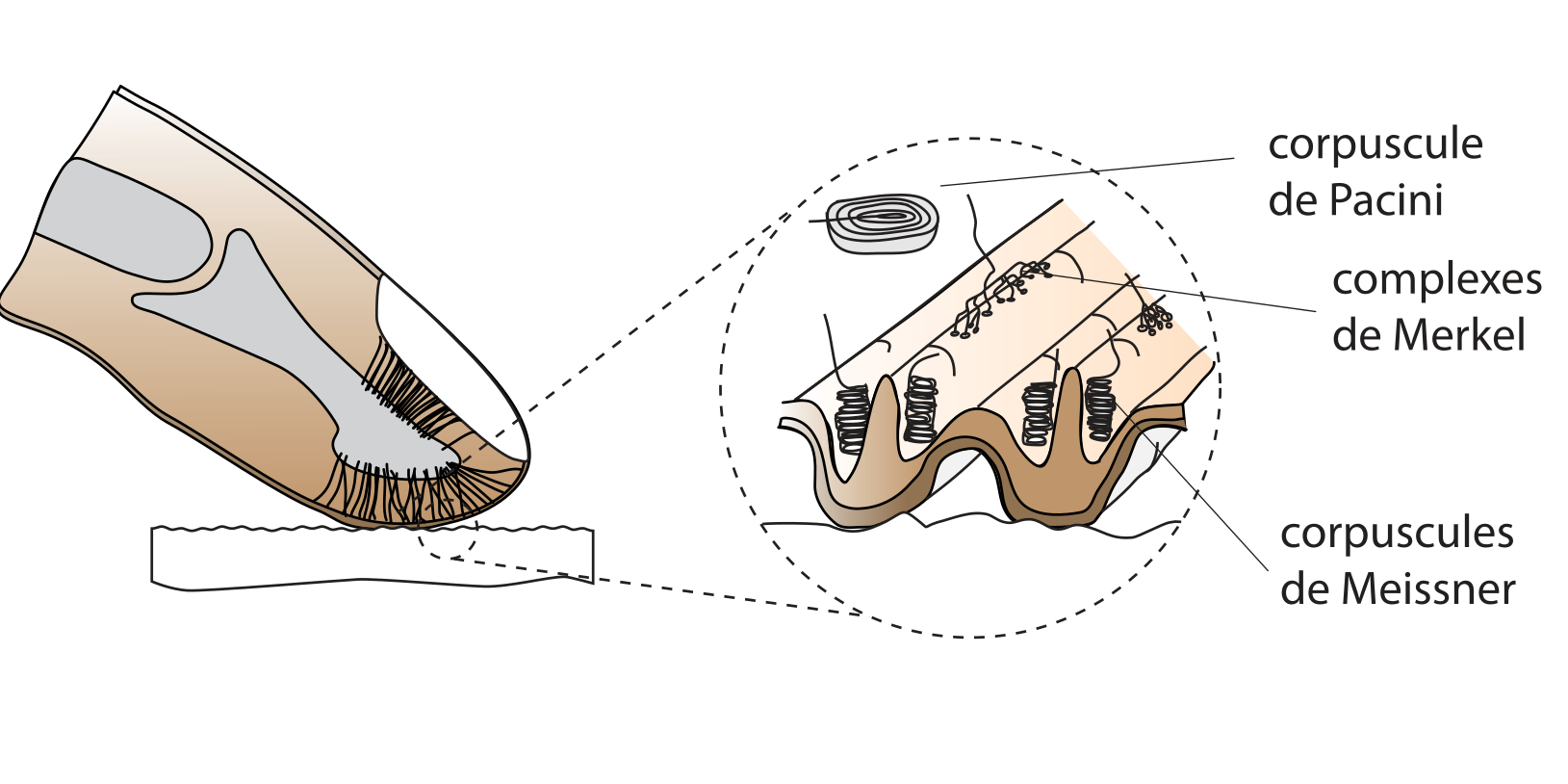

Contraintes et zone de contact
pendant une exploration tactile
Surfaces vibrotactiles
-
Perception tactile par vibrations (0Hz - 1kHz)
- Excitation directe des capteurs sous-cutanés
- Excitation directe des capteurs sous-cutanés
-
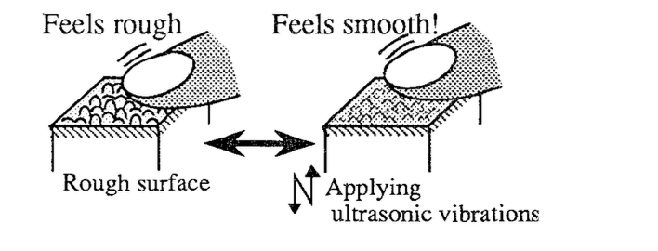
Lubrification ultrasonore /modulation de friction (> 20kHZ)
- Modification du coefficient de frottement en temps réel
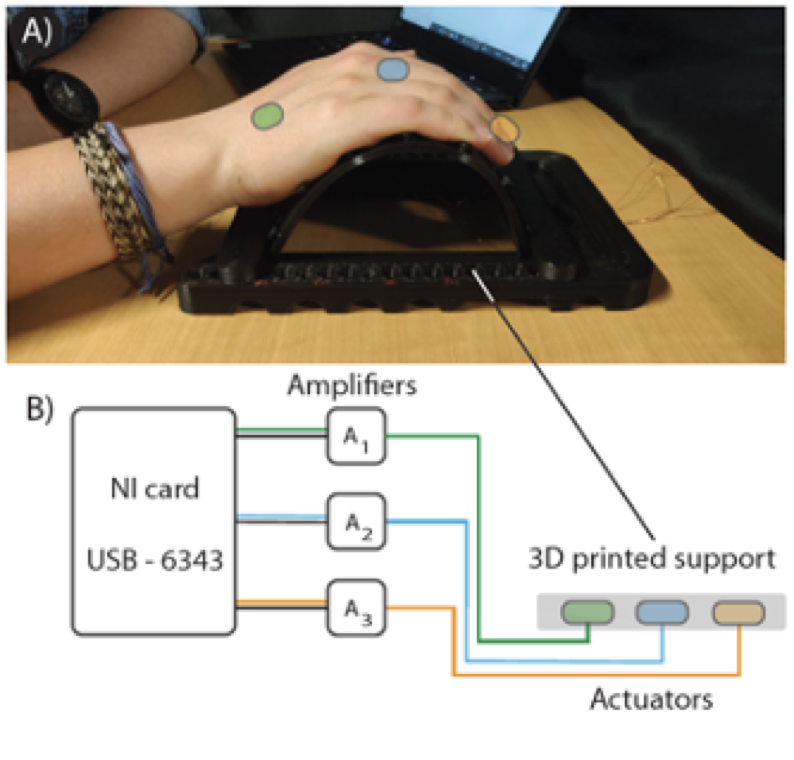
Stimulation tactile
Apparent haptic motion
A multisensory, multimodal, smart haptic handle

Guitare virtuelle

Etude des composants kinesthétiques et vibrotactiles
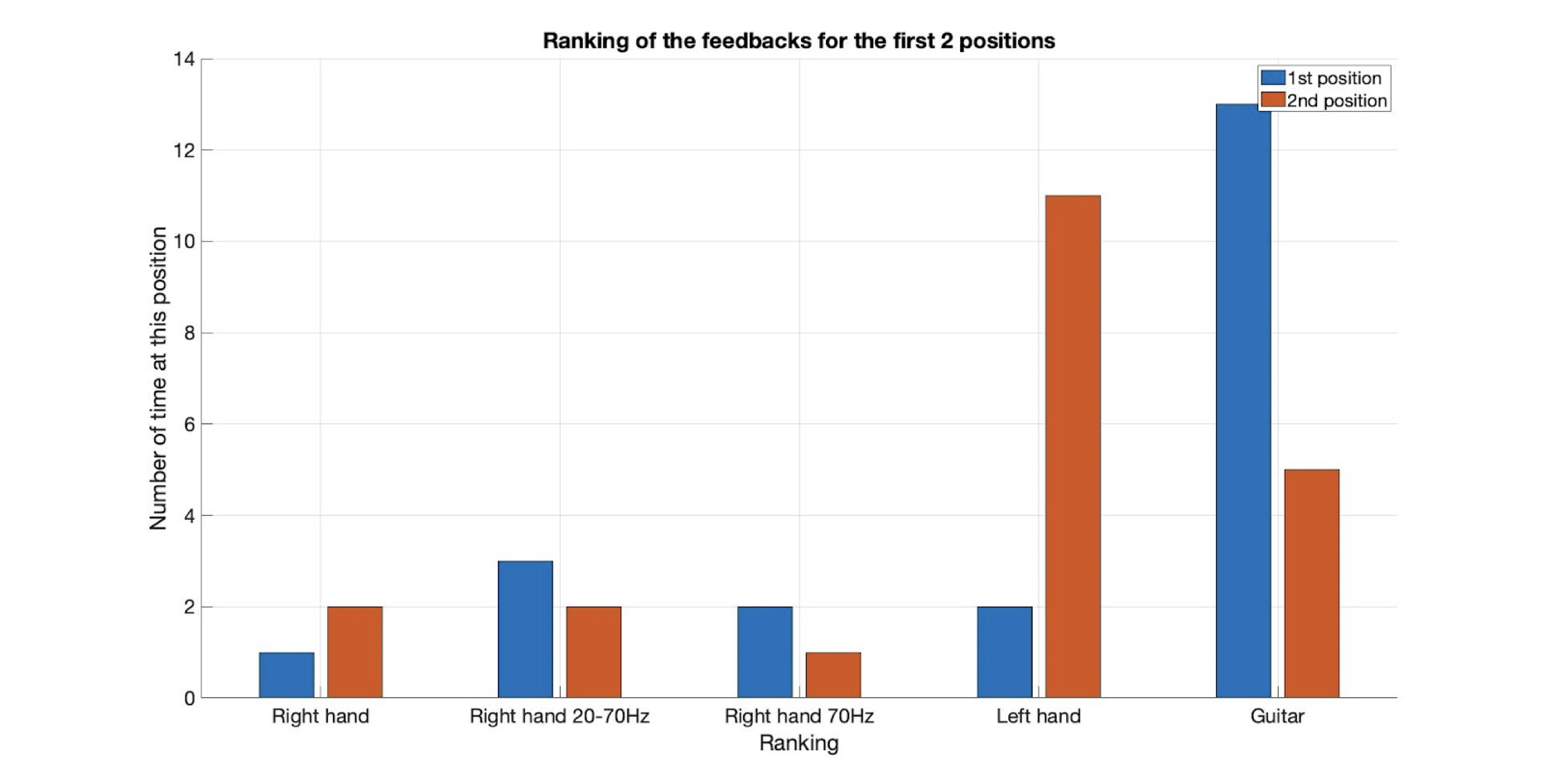
Reproduire le toucher d'une corde sur une surface haptique

Ultrasound Friction Modulation

Capabilities
- Modulates fingertip friction digitally
- Continuous and transients features
- High-bandwidth position measurement
Challenges
- Variability of friction force
- Effect of pressing force
Subtitle
Principle

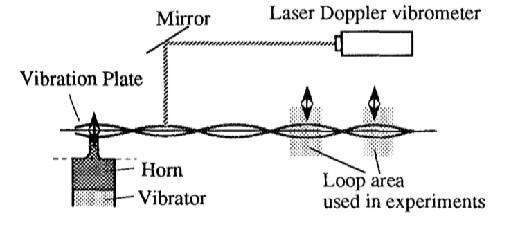
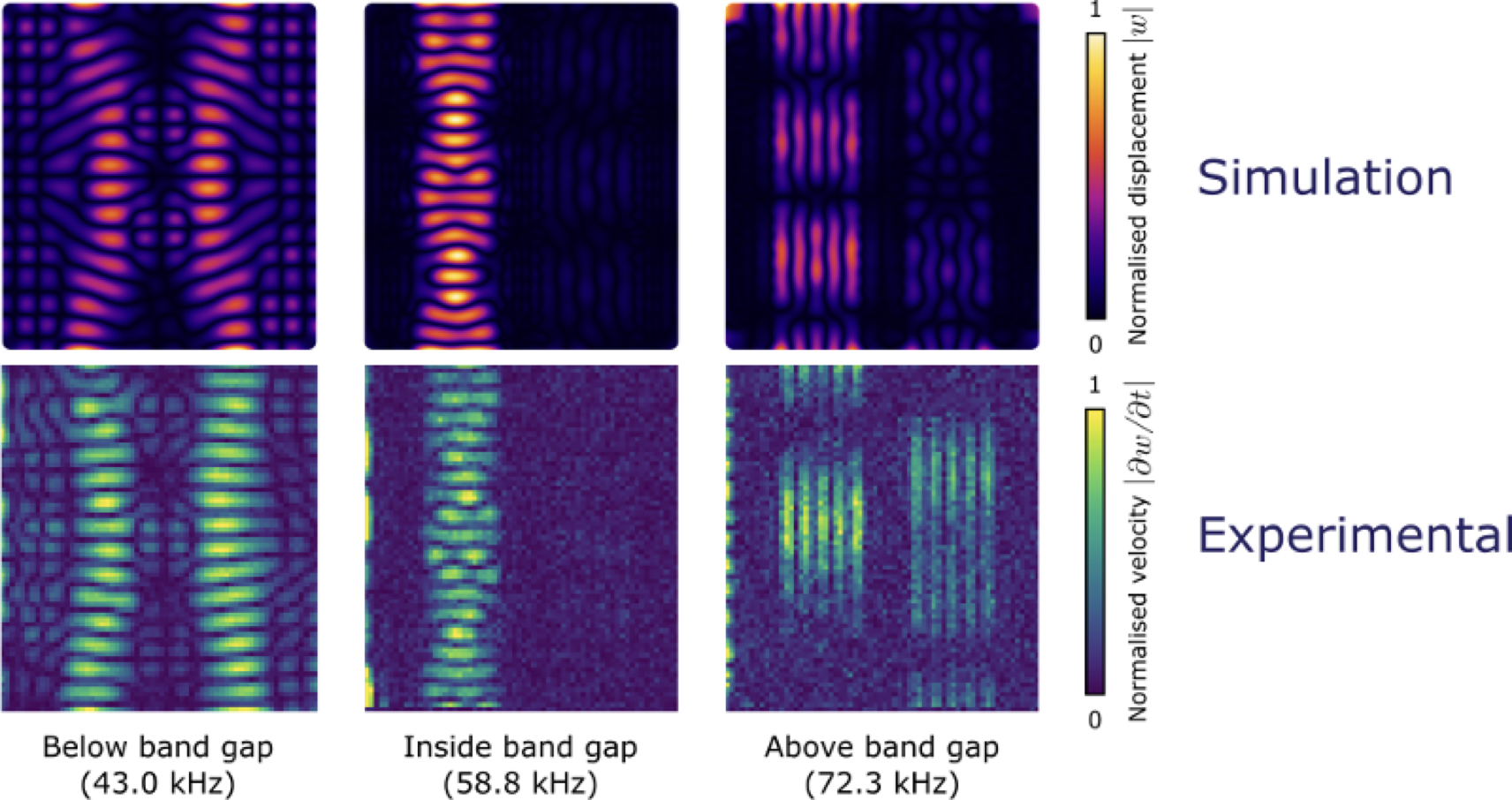
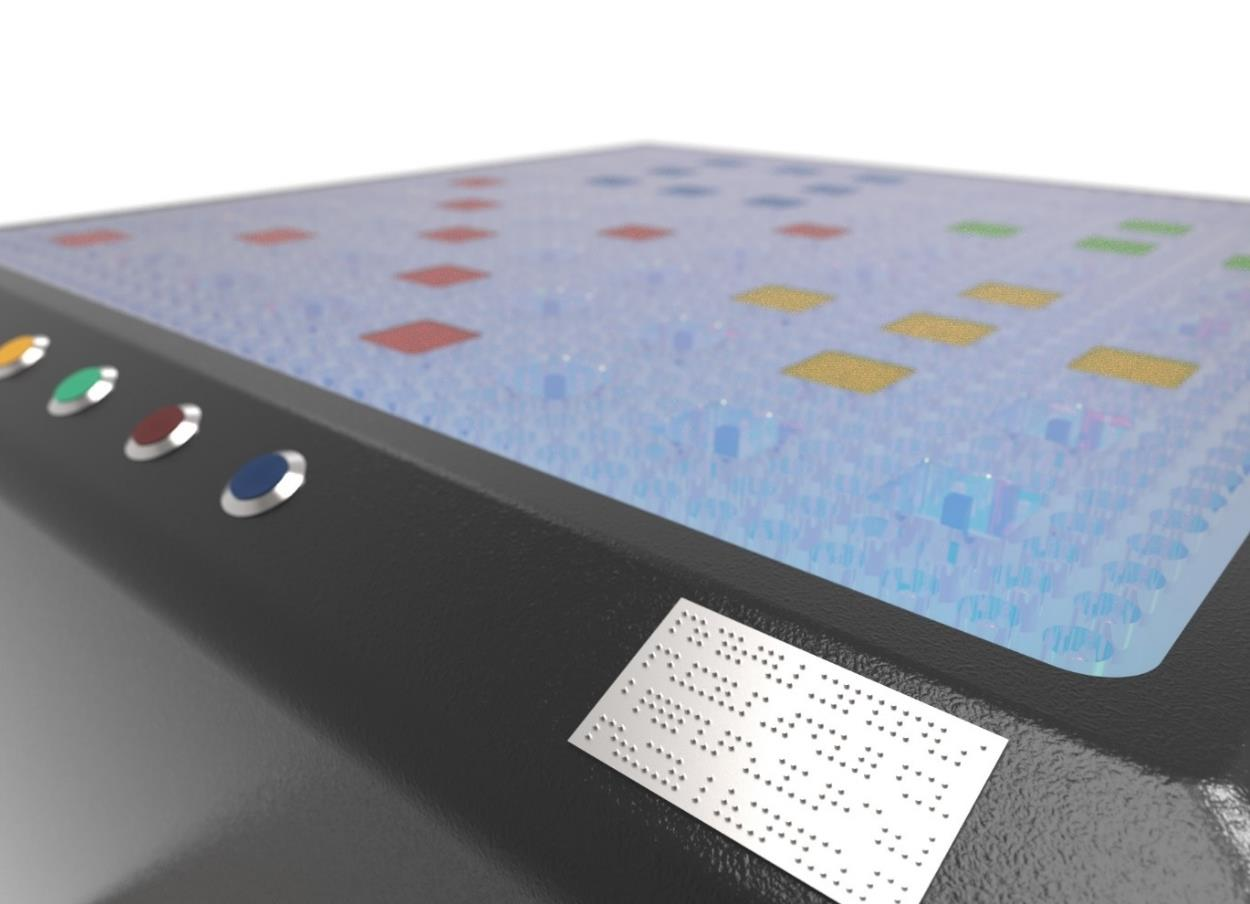
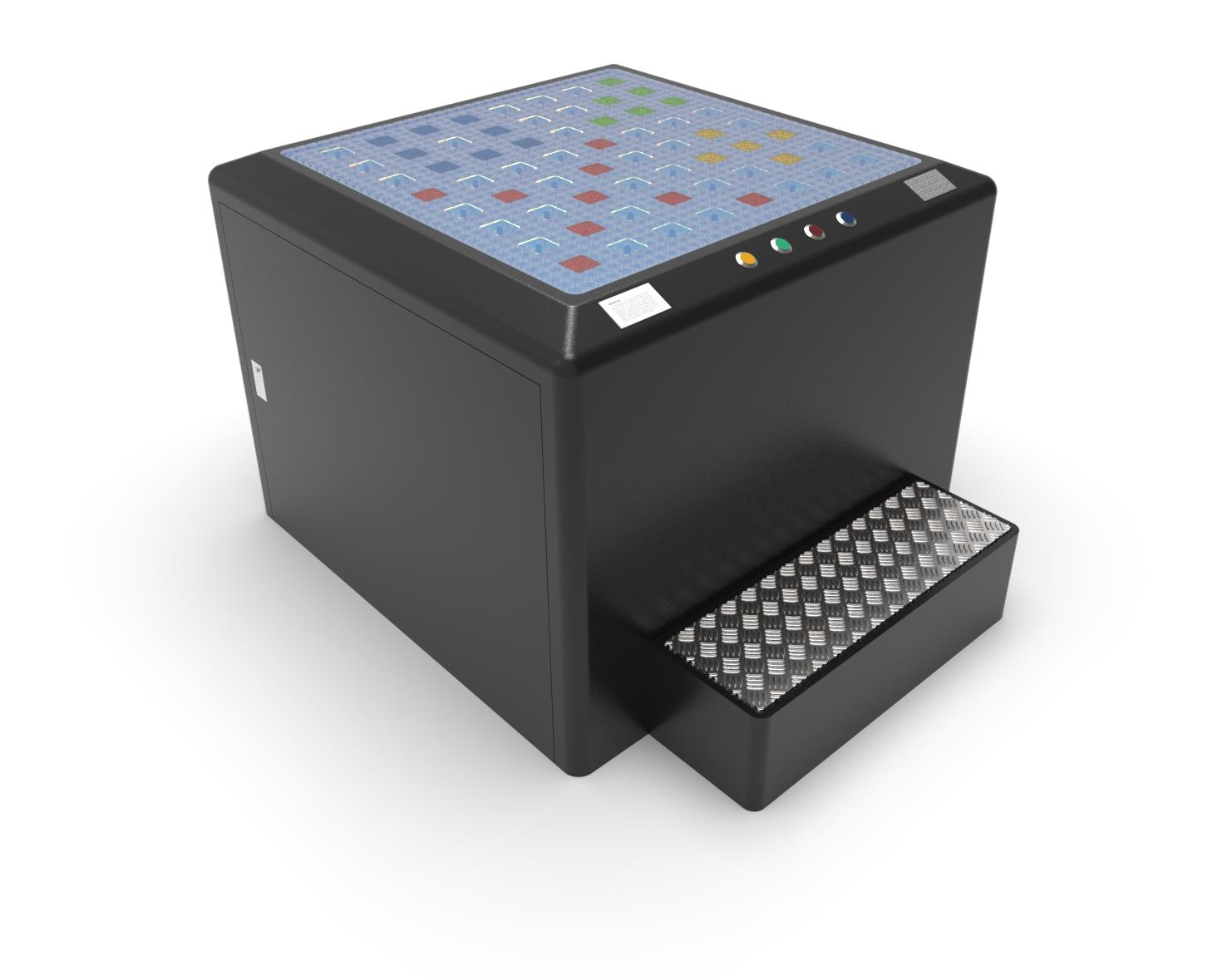
Vibrotactile localisé par des métamatériaux acoustiques
Thomas Daunizeau
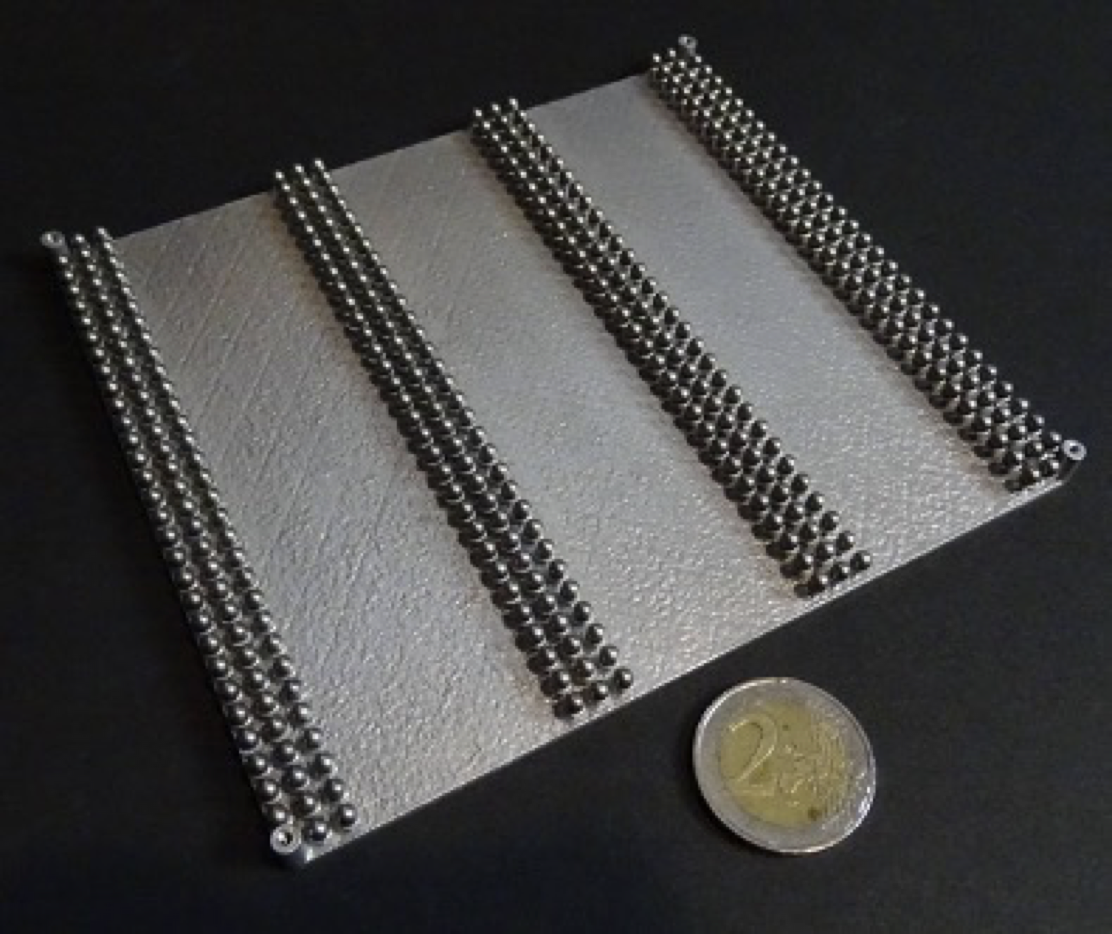
Waveguides for ultrasonic friction reduction
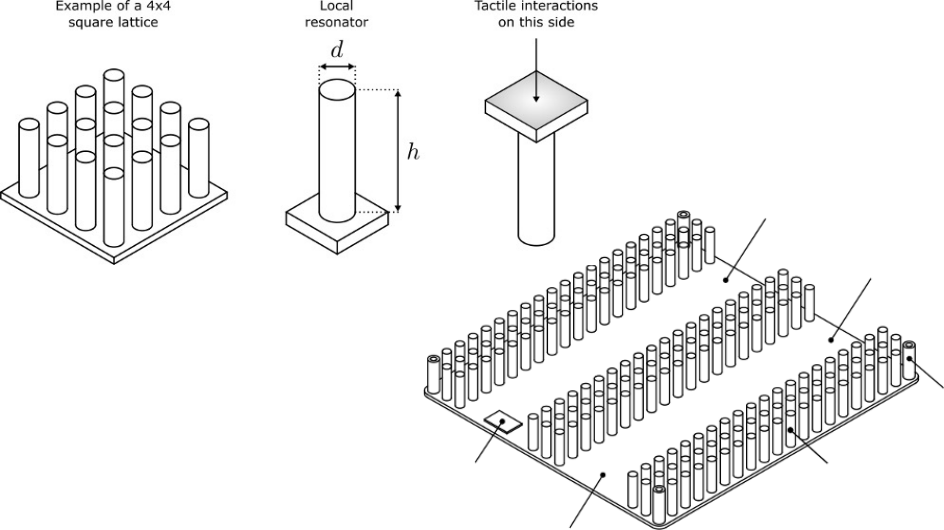
Acoustic meta-materials localize vibrations on a continuous medium
- Retour tactile multidoigt / multipoints
- Buttons et Sliders virtuels multiple sur une large surface continue [Tableau de bord / panneau de contrôle]
Proposition d'installation
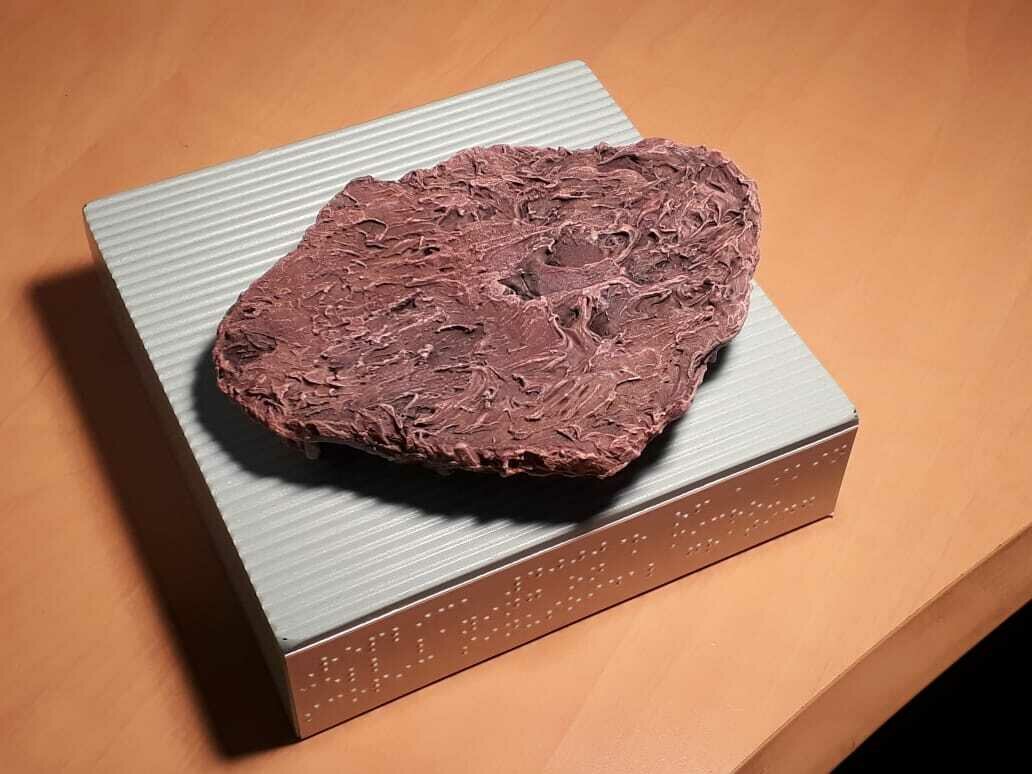
1. Stand pédagogique
- Expliquer le sens du toucher
- Expliquer la stimulation vibrotactile
2. Stand expérience participative
- Démonstration de la technologie
- Évaluer la stimulation et l'associer à des adjectifs de perception
1. Stand pédagogique
- Vidéo "Sens du toucher" par Vincent Hayward ( ~4 min, à produire)
- Maquette d'une cellule de peau x4000
- Dispositif de visualisation de contact doigt / surface
-
Expérience de Chladni sur une plaque vibrotactile

2. Stand expérience participative
- Démonstration de la technologie

Évaluer la stimulation et l'associer à des adjectifs de perception
Budget
Timeline
Universciences
By Sinan Haliyo




