Exercice 2:
Mesure de position et de vitesse angulaire
Introduction à la Robotique
TD 2 - Automatique & Commande
Codeur Incrémental Optique
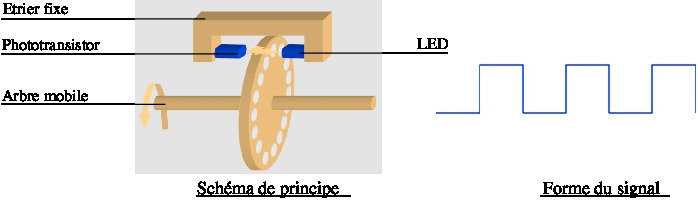
Q1. Indiquer la résolution angulaire
np = 2048
r = \frac{2\pi}{n_p}
r = 3,07\times 10^{-3} rad/point
Q2. En supposant que le point poff = 256 correspond à la valeur angulaire q0 = 0
A quelle valeur angulaire correspond une mesure de p = 768 points ?
np = 2048
q = r (p - p_{off})
q = \frac{2\pi}{2048}\times(768 - 256) = \frac{\pi}{2}
poff = 256
Q3. Quelle relation permet de calculer le nombre de points codeurs correspondant à une valeur angulaire donnée?
np = 2048
q = r (p - p_{off})
p = \frac{q}{r} + p_{off}
Q4. Mesure indirecte de la vitesse angulaire
\Omega(t) = \lim_{dt \rightarrow 0} \frac{q(t+dt) - q(t)}{dt}
\Omega(t) \approx \frac{q(t+dt) - q(t)}{dt}
t_k = k dt + t_0 \forall k \in \mathbb{N}
\Omega(t_k) = \frac{q(t_{k+1}) - q(t_k)}{dt}
\Rightarrow \boxed{\Omega_k = \frac{q_{k} - q_{k-1}}{dt}}
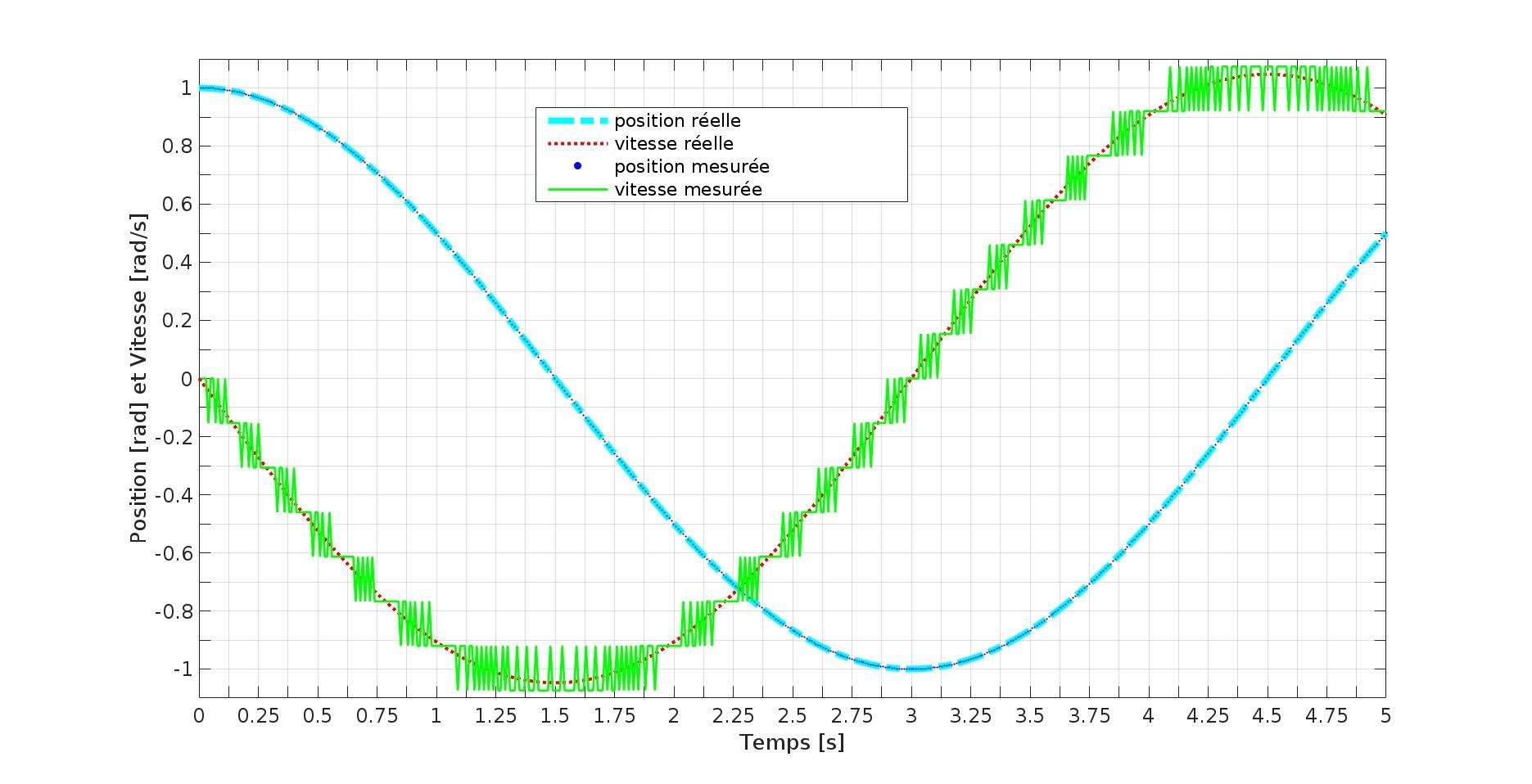
Signaux de position et de vitesse réels et signaux de position
et de vitesse mesurée pour un signal de position sinusoïdale.
\Omega_{mes,k} = \frac{q_{mes,k} - q_{mes,k-1}}{dt}
= \frac{q_k \pm 0,5r - q_{k-1} \pm 0,5r}{dt} = \Omega_k \pm \frac{r}{dt}
b = \frac{2\pi}{4096}\frac{1}{0,01} = 0,15 rad/s
L3 UE Robotique - TD Autom - Exo 2
By Sinan Haliyo
L3 UE Robotique - TD Autom - Exo 2
Mesure de vitesse angulaire




