Interactive Optical Robots
a novel instrument for biology



Touching the microworld
This is the aim of IOTA Project, funded by ANR France and DIM Elicit.
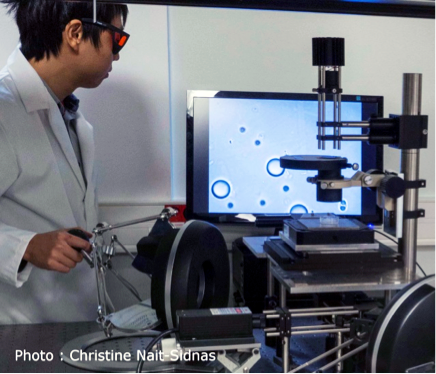
We are using the power of light to manipulate cells and molecules, and let the user control and feel the interaction with his fingertips.
Haptic feedback enables fine manipulation
Optical Tweezers
- A tightly focused laser beam to trap micro objects (1 - 5 µm)
- Non-contact multi object manipulation in liquid
- Laser wavelength : 1070nm
- Laser power: 400mW
3D force measurement :
- Position tracking with an Event-Camera
- ~ 10 pn resolution, 300 pN max
- 300 Hz / 1 kHz bandwidth

3D actuation and measurement

The "robot" is the laser path actuated with active MOEMS components and 3DoF sample-holder

Multitrap OPTOBOTS

Force-sensing Optobot
Rotating a Cell
In-liquid assembly
T-cell / Cancer
interaction forces

Mecanobiology on gametes
Ongoing work
Exploring applications with end-users
- Cancer therapy / CAR T-Cell development
- Fertility research
- Bioprinting for prosthetic organs tissues
DL / AI automation
Immersive
User Interface
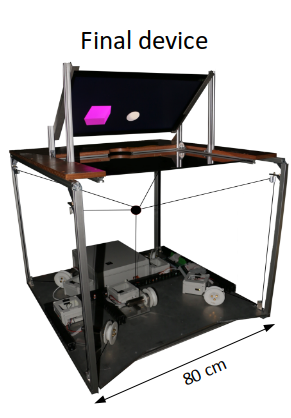
Product objectives
An interactive scientific instrument - a flexible lab-on-chip
- Closed sample chamber
- Real-Time teleoperation
- Microfluidic chip flow control
- Biochemical coatings
Interactive exploration, manipulation and characterization at small scales with micrometer & piconewton resolution
Transscale coupling and natural interaction
Force-feedback user interface
Biomedical applications & microassembly
A New Scientific Instrument
Asso. Professor



Edison GERENA
PhD Candidate
ISIR/Sorbonne
Florian
FAGE
Engineer
ISIR/Sorbonne
Stéphane Régnier,
Professor

The Team
Our Papers @ICRA'20
Interactive Optical Robots: a novel instrument for biology
By Sinan Haliyo
Interactive Optical Robots: a novel instrument for biology
My talk at ICRA'20 Virtual - *Workshop on the applications of micro-nanorobotics*




