First progress report of our GoodAI project
Martin Biehl and Nathaniel Virgo
Overview
- Original planning as inference framework
- Progress / extensions
- Expected reward maximization
- Parametrized kernels
- Shared kernels
- Multi-agent setup and games
- Uncertain (PO)MDP
- Related project funded
- Two uncertainties: designer and agent uncertainty
- Preliminary work
Planning as inference
Terminology:
- Planning:
- finding policy parameters that maximize probability of achieving a goal
- Maximum likelihood inference:
- finding model parameters that maximize probability of data
Planning as inference
Original framework used two insights:
- Planning as inference (PAI):
- Consider goal as data
- can use max. likelihood to solve planning!
- Expectation-Maximization (EM) algorithm:
- (one) way to solve max. likelihood inference
- can use EM to solve planning!
Planning as inference
Practical side of original framework:
- Represent
- Planning problem structure by Bayesian networks
- Goal and possible policies by sets of probability distributions
- Find policies that maximize probability of goal via geometric EM algorithm.
Bayesian network
goal
policies
Planning as inference
- Problem structures as Bayesian networks:
- Let \(V=\{1,...,n\}\) index the nodes in a graph then Bayesian network of random variables \(X=(X_1,..,X_n)\) defines factorized joint probability distribution:
\[\newcommand{\pa}{\text{pa}}p(x) = \prod_{v\in V} p(x_v | x_{\pa(v)}).\] - distinguish:
- fixed nodes \(B\subset V\)
- changeable nodes \(A\subset V\)
- then:
\[\newcommand{\pa}{\text{pa}}p(x) = \prod_{a\in A} p(x_a | x_{\pa(a)}) \, \prod_{b\in B} \bar p(x_b | x_{\pa(b)})\]
- Let \(V=\{1,...,n\}\) index the nodes in a graph then Bayesian network of random variables \(X=(X_1,..,X_n)\) defines factorized joint probability distribution:
Planning as inference
- Problem structures as Bayesian networks:
Planning as inference
Bayesian network
goal
- Represent goals and policies by sets of probability distributions:
-
goal must be an event i.e. function \(G(x)\) with
- \(G(x)=1\) if goal is achieved
- \(G(x)=0\) else.
-
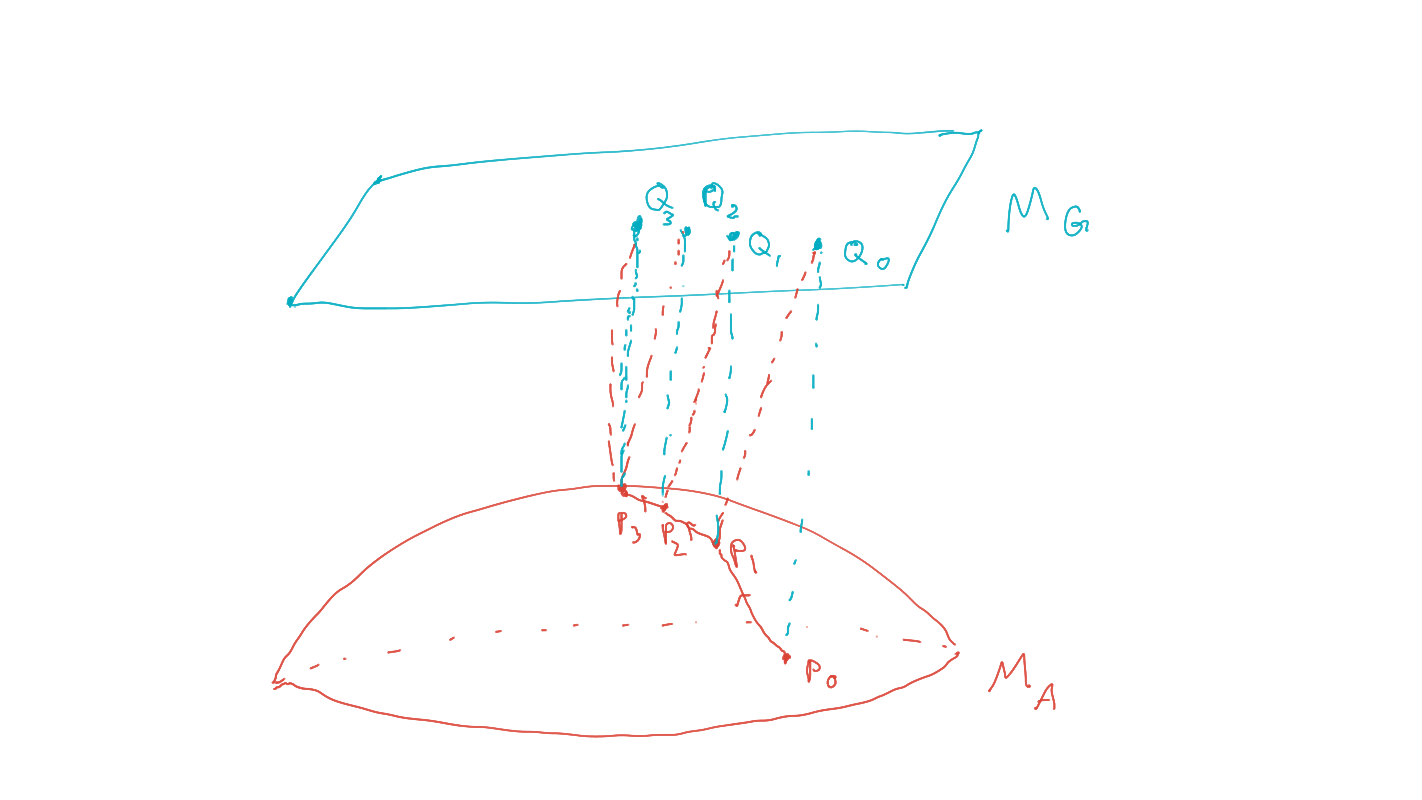
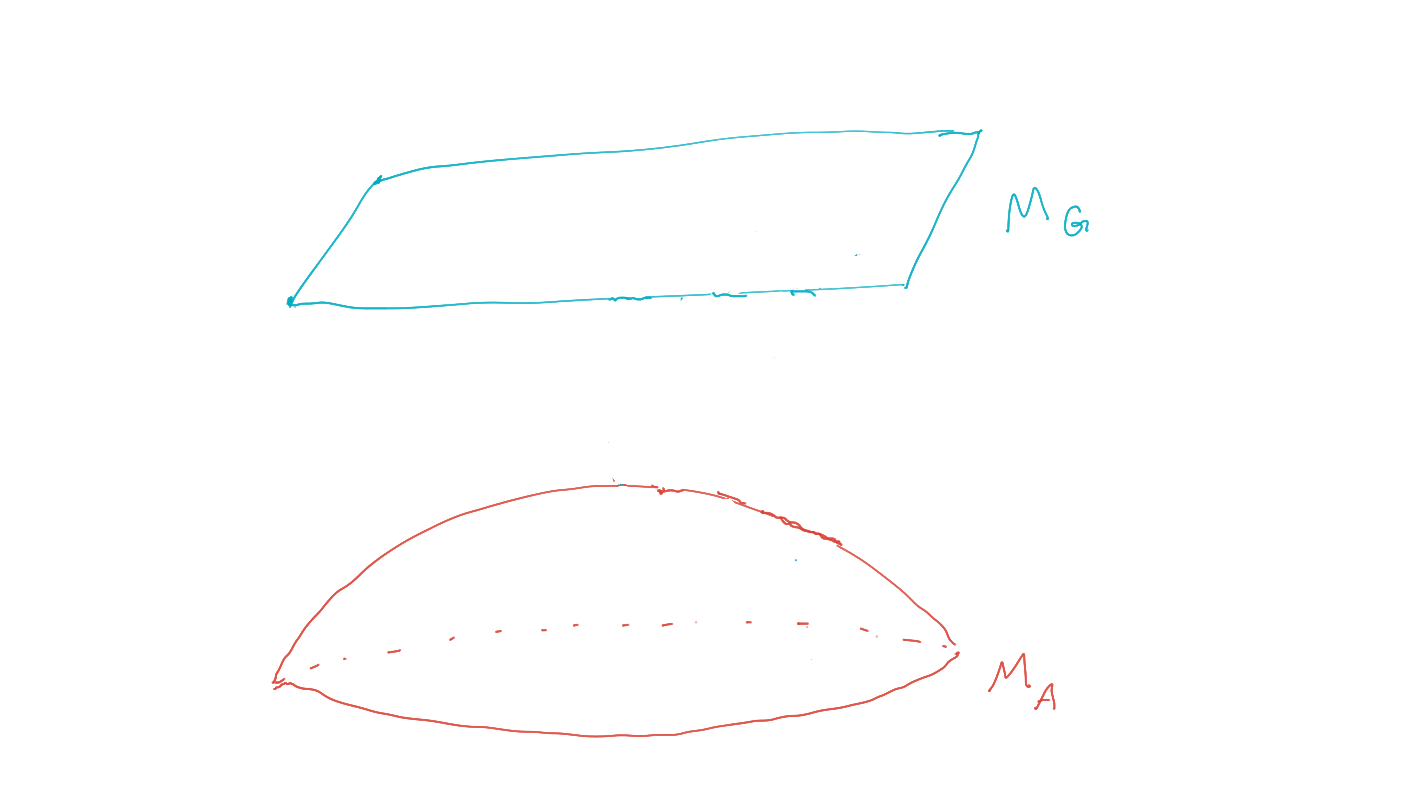
goal manifold is set of distributions where the goal event occurs with probability one:
\[M_G:=\{P: p(G=1)=1\}\]
-
goal must be an event i.e. function \(G(x)\) with
Planning as inference
- Represent goals and policies by sets of probability distributions:
-
policy is a choice of the changeable Markov kernels
\[\newcommand{\pa}{\text{pa}}\{p(x_a | x_{\pa(a)}):a \in A\}\] -
agent manifold/policy manifold is set of distributions that can be achieved by varying policy
\[\newcommand{\pa}{\text{pa}}p(x) = \prod_{a\in A} p(x_a | x_{\pa(a)}) \, \prod_{b\in B} \bar p(x_b | x_{\pa(b)})\]
-
policy is a choice of the changeable Markov kernels
Bayesian network
goal
policies
Planning as inference
- Find policies that maximize probability of goal via geometric EM algorithm:
-
planning as inference finds policy / agent kernels such that:
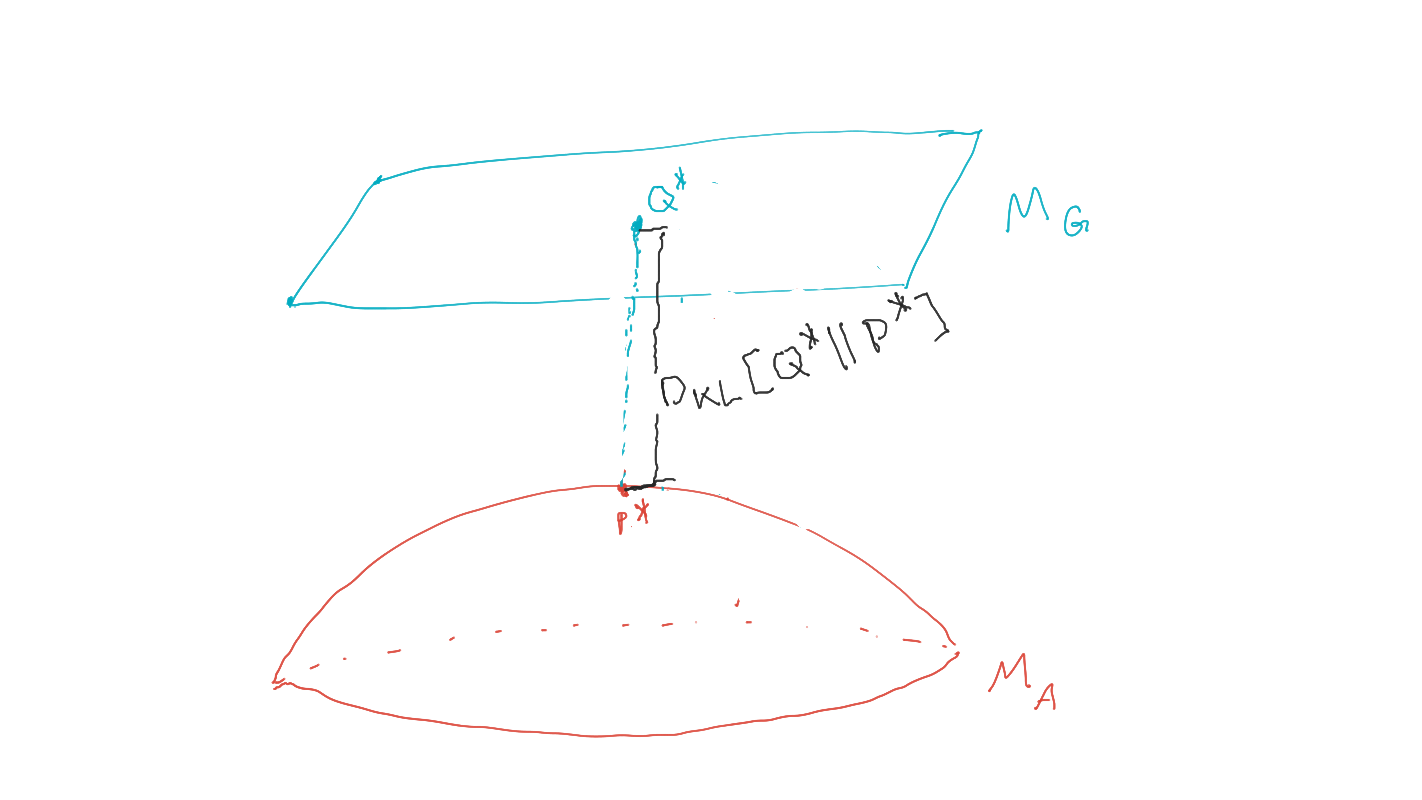
\[P^* = \text{arg} \max_{P \in M_A} p(G=1).\] - (compare to maximum likelihood inference)
-
planning as inference finds policy / agent kernels such that:
Bayesian network
goal
policies
Planning as inference
- Find policies that maximize probability of goal via geometric EM algorithm:
- Can prove that \(P^*\) is the distribution in agent manifold closest to goal manifold in terms of KL-divergence
- Local minimizers of this KL-divergence can be found with the geometric EM algorithm
Bayesian network
goal
policies
Planning as inference
- Find policies that maximize probability of goal via geometric EM algorithm:
- Start with an initial prior, \(P_0 \in M_A\) .
- (e-projection)
\[Q_t = \text{arg} \min_{Q\in M_G} D_{KL}(Q∥P_t )\] - (m-projection)
\[P_{t+1} = \text{arg} \min_{P \in M_A} D_{KL} (Q_t ∥P )\]
Bayesian network
goal
policies
Planning as inference
- Find policies that maximize probability of goal via geometric EM algorithm:
- Equivalent algorithm using only marginalization and conditioning:
- Initial agent kernels define prior, \(P_0 \in M_A\).
- Get \(Q_t\), from \(P_t\) by conditioning on the goal: \[q_t(x) = p_t(x|G=1).\]
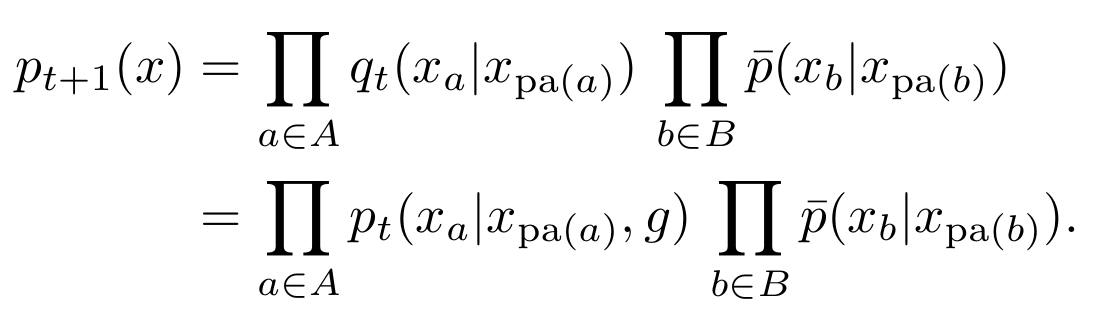
- Get \(P_{t+1}\), by replacing agent kernels by conditional distributions in \(Q_t\):
\[\newcommand{\pa}{\text{pa}} p_{t+1}(x) = \prod_{a\in A} q_t(x_a | x_{\pa(a)}) \, \prod_{b\in B} \bar p(x_b | x_{\pa(b)})\]
\[\newcommand{\pa}{\text{pa}} \;\;\;\;\;\;\;= \prod_{a\in A} p_t(x_a | x_{\pa(a)},g) \, \prod_{b\in B} \bar p(x_b | x_{\pa(b)})\]
Proposal
- Exploit planning as inference setup to answer questions about:
-
Multiple, possibly competing goals
-
Coordination and communication from an information theoretic perspective
-
Dynamic scalability of multi-agent systems
-
Dynamically changing goals that depend on knowledge acquired through observations
-
Progress
- Successfully extended framework by features necessary for tackling goals of our project.
- These are discussed next:
- Expected reward maximization
- Parametrized kernels
- Shared kernels
- Multi-agent setup and games
- Uncertain (PO)MDP
- Related project funded
- Two uncertainties: designer and agent uncertainty
- Relevance for project will be highlighted
Expected reward maximization
- PAI finds policy that maximizes probability of the goal event:
\[P^* = \text{arg} \max_{P \in M_A} p(G=1).\] - Often want to maximize expected reward of a policy:
\[P^* = \text{arg} \max_{P \in M_A} \mathbb{E}_P[r]\] - Can we solve the second problem via the first?
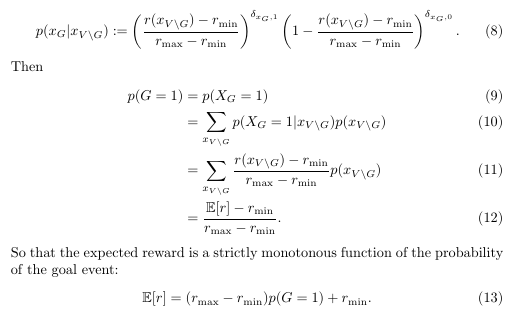
- Yes, at least if reward has a finite range \([r_{\text{min}},r_{\text{max}}]\):
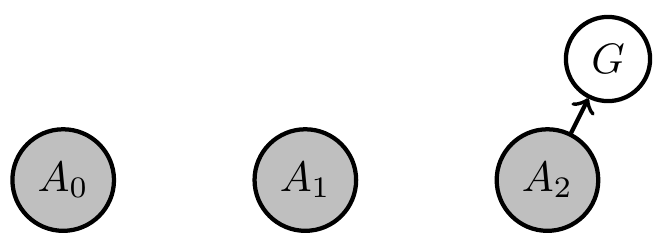
- add binary goal node \(G\) to Bayesian network and set:
\[\newcommand{\ma}{{\text{max}}}\newcommand{\mi}{{\text{min}}}\newcommand{\bs}{\backslash}p(G=1|x):= \frac{r(x)-r_\mi}{r_\ma-r_\mi}.\]
- add binary goal node \(G\) to Bayesian network and set:
Expected reward maximization
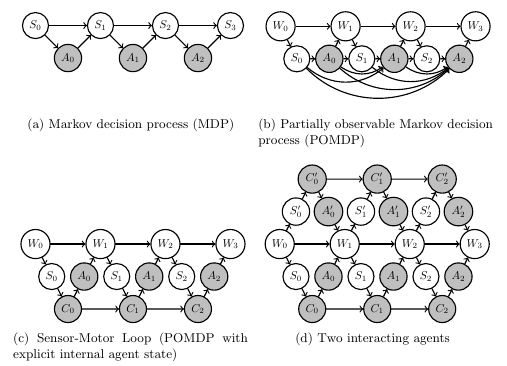
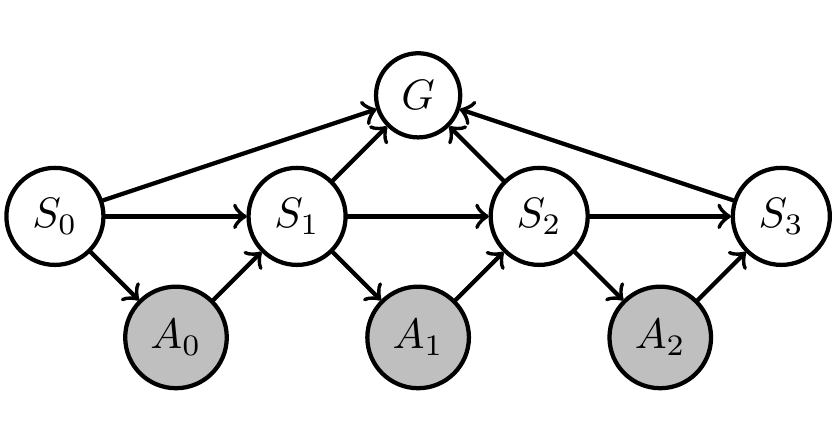
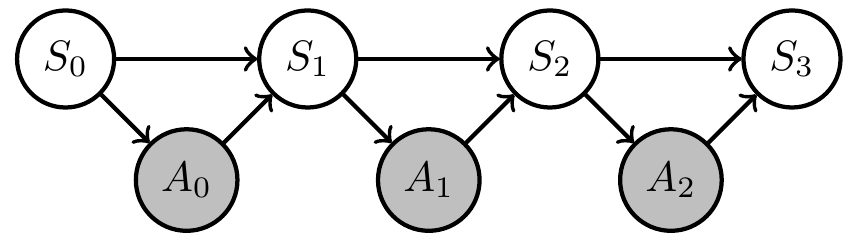
- Example application: Markov decision process
- reward only depending on states \(S_0,...,S_3\): \[r(x):=r(s_0,s_1,s_2,s_3)\]
- reward is sum over reward at each step:
\[r(s_0,s_1,s_2,s_3):= \sum_i r_i(s_i)\]
Expected reward maximization
- Relevance for project:
- reward based problems more common than goal event problems ((PO)MDPs, RL, losses...)
- extends applicability of framework
Parametrized kernels
- Often we don't want to choose the agent kernels completely freely e.g.:
- choose parametrized agent kernels
\[p(x_a|x_{\text{pa}(a)}) \to p(x_a|x_{\text{pa}(a)},\theta_a)\]
- choose parametrized agent kernels
- What do we have to adapt in this case?
- Step 3 of EM algorithm has to be adapted
Parametrized kernels
- Algorithm for parametrized kernels (not only conditioning and marginalizing anymore):
- Initial parameters \(\theta(0)\) define prior, \(P_0 \in M_A\).
- Get \(Q_t\), from \(P_t\) by conditioning on the goal: \[q_t(x) = p_t(x|G=1).\]
- Get \(P_{t+1}\), by replacing parameter \(\theta_a\) of each agent kernel with result of:

Parametrized kernels
- Relevance for project:
- needed for shared kernels
- needed for continuous random variables
- neural networks are parametrized kernels
- scalability
Shared kernels
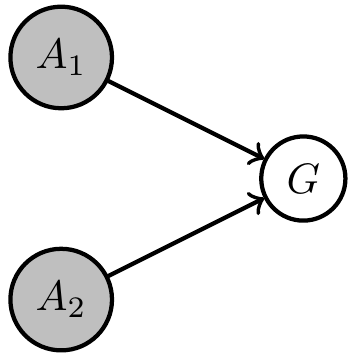
- We also often want to impose the condition that multiple agent kernels are identical
- E.g. the three agent kernels in this MDP:
Shared kernels
- Introduce "types" for agent kernels
- let \(c(a)\) be the type of kernel \(a \in A\)
- kernels of same type share
- input spaces
- output space
- parameter
- then \(p_{c(a)}(x_a|x_{\text{pa}(a)},\theta_c)\) is the kernel of all nodes with \(c(a)=c\).
Shared kernels
- Example agent manifold change under shared kernels
Shared kernels
- Algorithm then becomes
- Initial parameters \(\theta(0)\) define prior, \(P_0 \in M_A\).
- Get \(Q_t\), from \(P_t\) by conditioning on the goal: \[q_t(x) = p_t(x|G=1).\]
- Get \(P_{t+1}\), by replacing parameter \(\theta_c\) of all agent kernels of type \(c\) with result of:

Shared kernels
- Relevance for project:
- scalability (less parameters to optimize)
- make it possible to have
- multiple agents with same policy
- constant policy over time
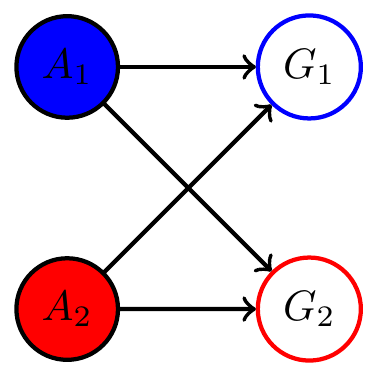
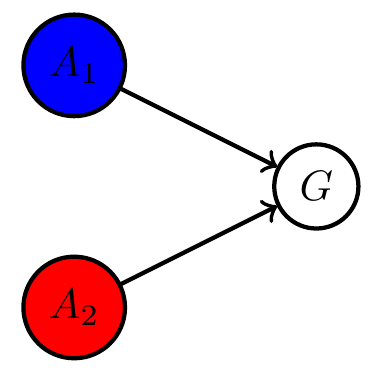
Multi-agent setup
Example multi agent setups:
Two agents interacting with same environment
Two agents with same goal
Two agents with different goals
Multi-agent setup
- Note:
- In cooperative setting:
- can often combine multiple goals to single common goal via event intersection, union, complement (supplied by \(\sigma\)-algebra)
- single goal manifold
- in principle can use single agent PAI as before
- In cooperative setting:
Multi-agent setup
- Note:
- In non-cooperative setting:
- goal events have empty intersection
- no common goal
- multiple disjoint goal manifolds
- goal events have empty intersection
- In non-cooperative setting:
Multi-agent setup
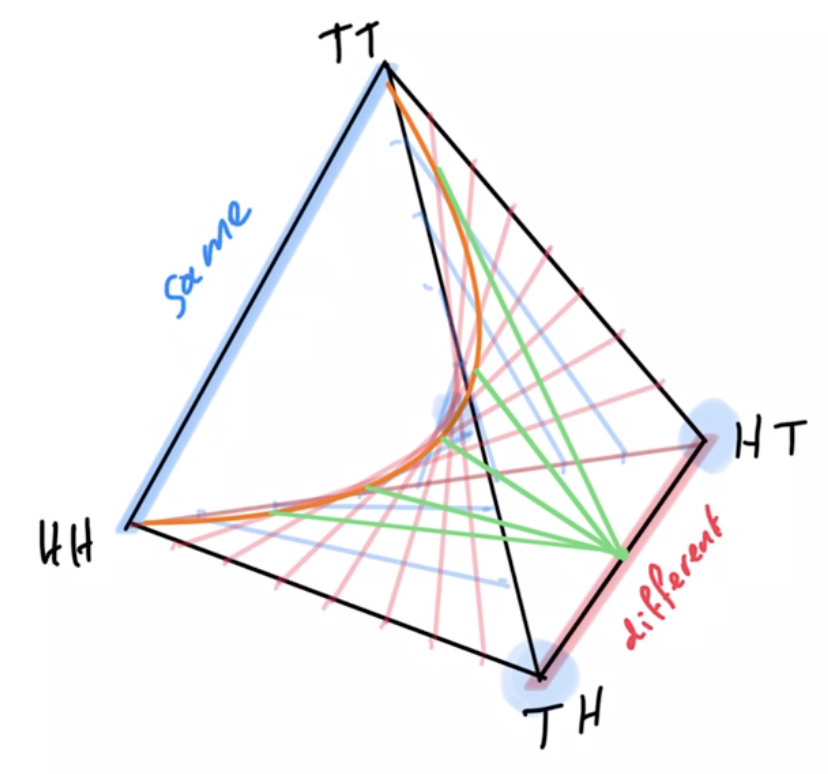
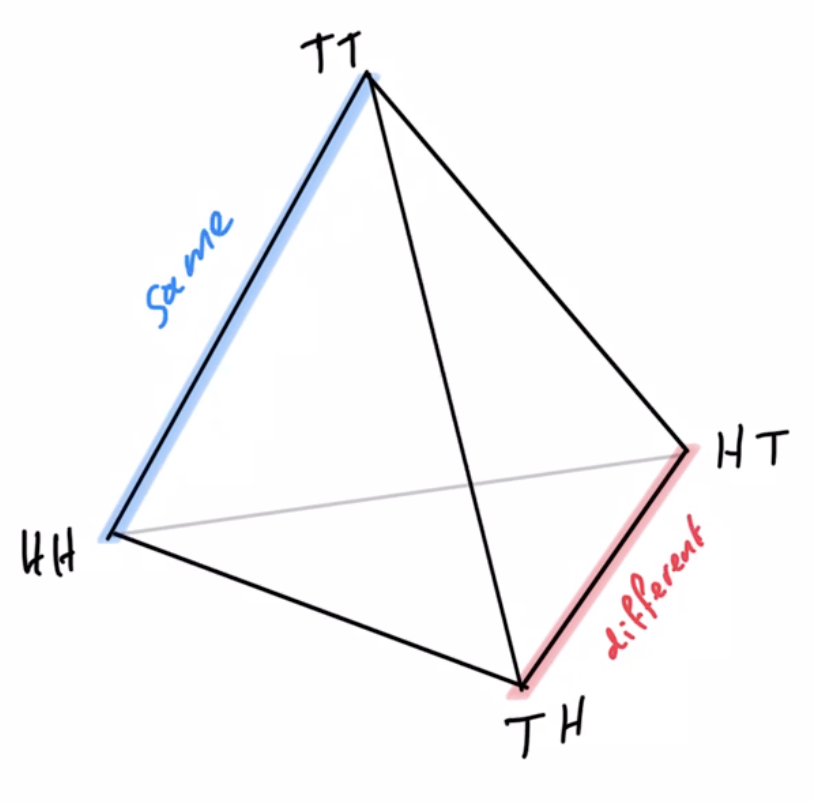
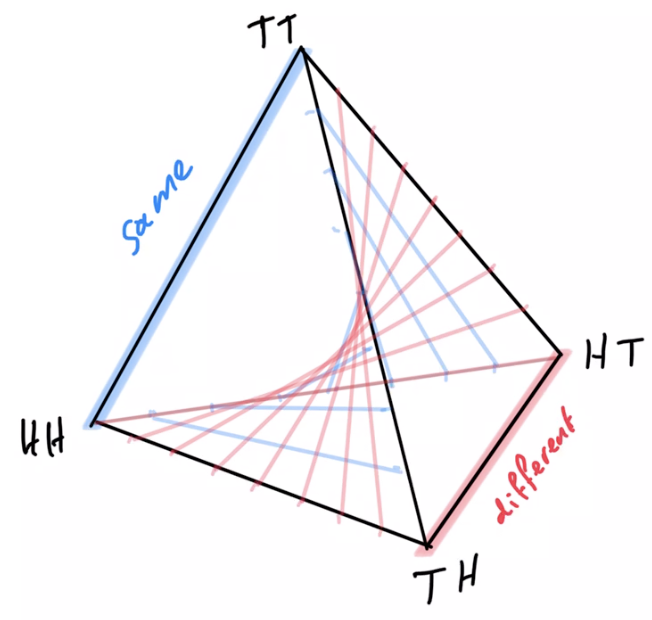
Example non-cooperative game: matching pennies
- Each player \(P_i \in \{1,2\}\) controls a kernel \(p(a_i)\) determining probabilities of heads and tails
- First player wins if both pennies are equal second player wins if they are different
Multi-agent setup
Example non-cooperative game: matching pennies
- Each player \(P_i \in \{1,2\}\) controls a kernel \(p(a_i)\) determining probabilities of heads and tails
- First player wins if both pennies are equal second player wins if they are different
joint pdists \(p(a_1,a_2)\)
disjoint goal manifolds
agent manifold
\(p(a_1,a_2)=p(a_1)p(a_2)\)
Non-cooperative games
- In non-cooperative setting
- instead of maximizing goal probability:
- find Nash equilibria
- can we adapt PAI to do this?
- established that using EM algorithm alternatingly does not converge to Nash equilibria
- other adaptations may be possible...
- instead of maximizing goal probability:
Non-cooperative games
- Counterexample for multi-agent alternating EM convergence:
- Two player game: matching pennies
- Each player \(P_i \in \{1,2\}\) controls a kernel \(p(a_i)\) determining probabilities of heads and tails
- First player wins if both pennies are equal second player wins if they are different
- Two player game: matching pennies
Non-cooperative games
- Counterexample for multi-agent alternating EM convergence:
- Nash equilibrium is known to be both players playing uniform distribution
- Using EM algorithm to fully optimize player kernels alternatingly does not converge
- Taking only single EM steps alternatingly also does not converge
EM
EM
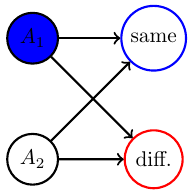
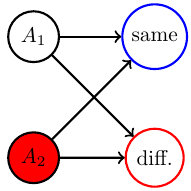
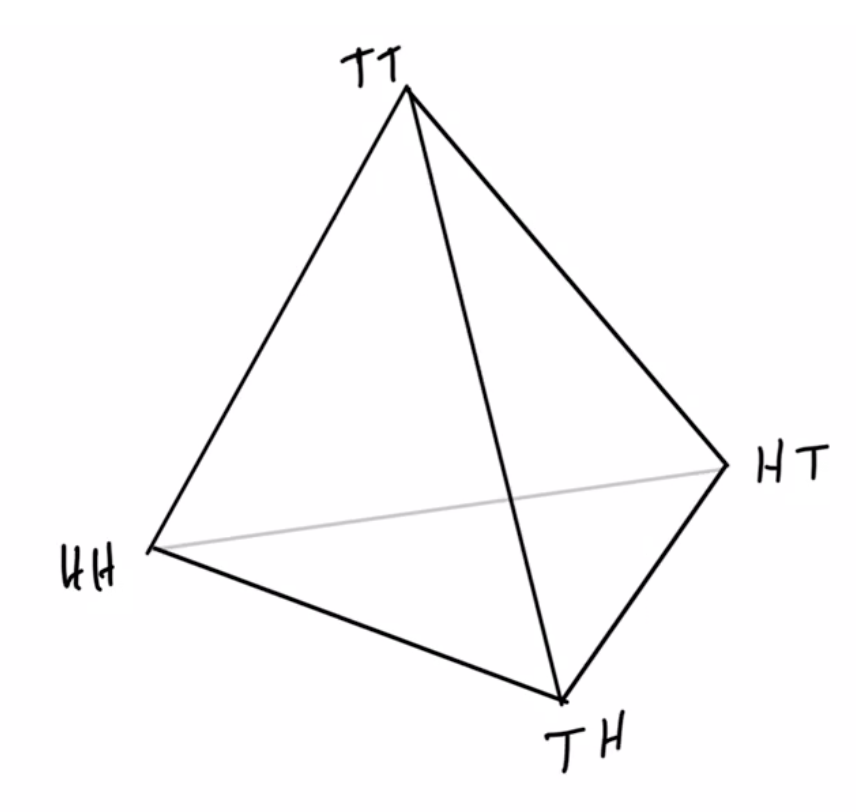
Non-cooperative games
- Counterexample for multi-agent alternating EM convergence
- fix a strategy for player 2 e.g. \(p_0(A_2=H)=0.2\)
Non-cooperative games
Text
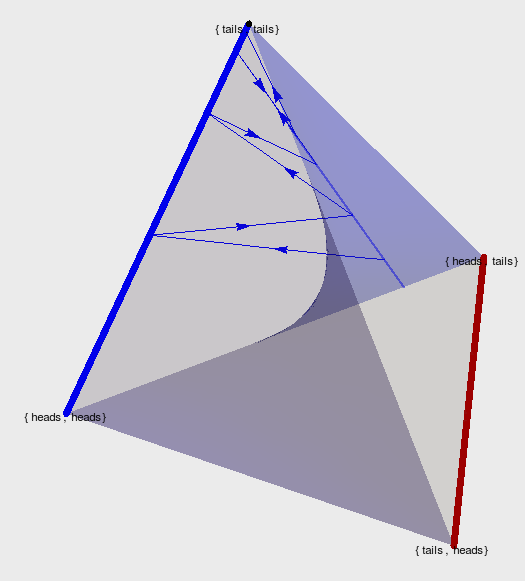
- run EM algorithm for P1
- Ends up on edge from (tails,tails) to (tails,heads)
- result: \(p(A_1=T)=1\)
- then optimizing P2 leads to \(p(A_2=H)=1\)
- then optimizing P1 leads to \(p(A_1=H)=1\)
- and on and on...
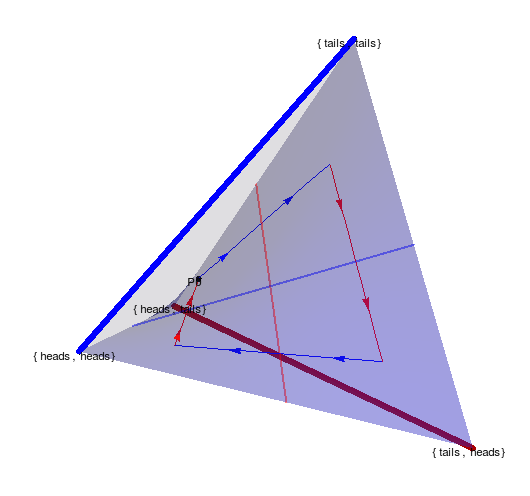
Non-cooperative games
Text
- Taking one EM step for P1 and then one for P2 and so on...
- ...also leads to loop.
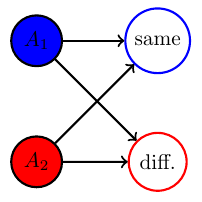
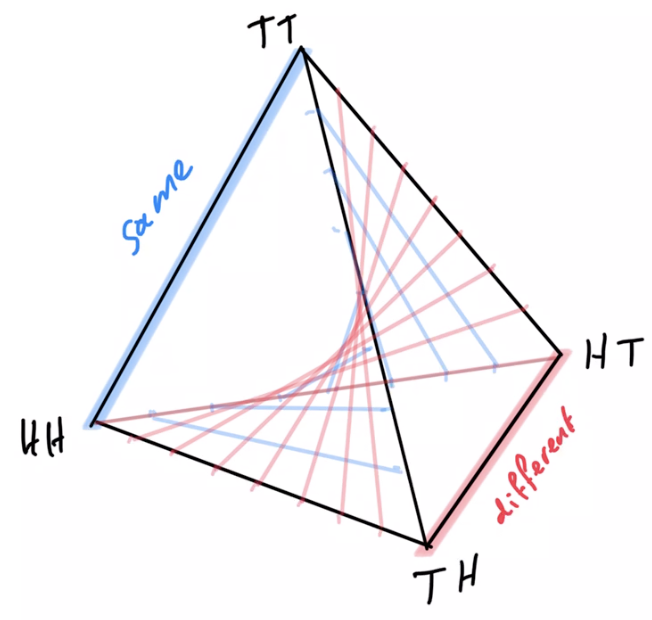
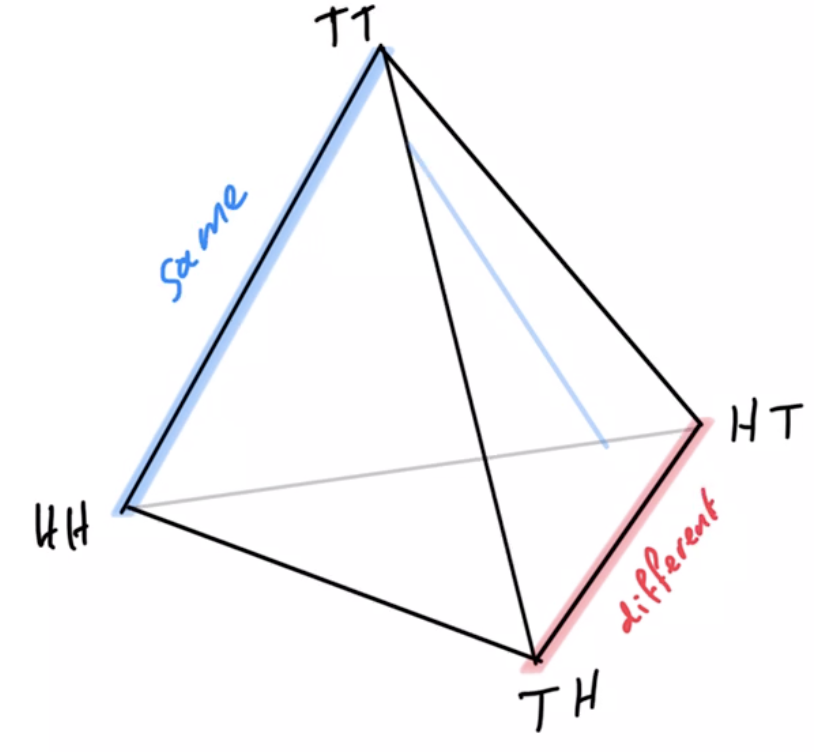
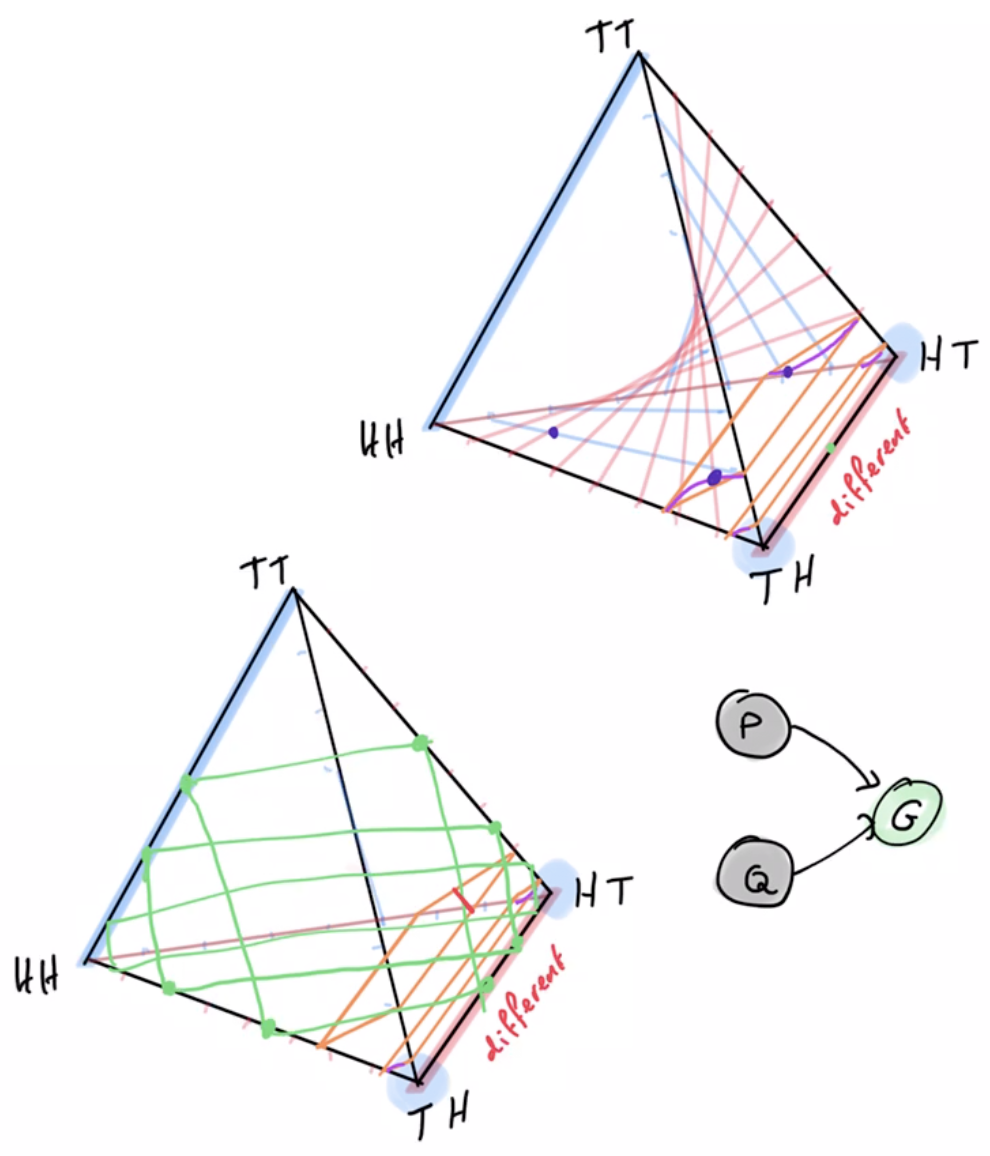
Cooperative games
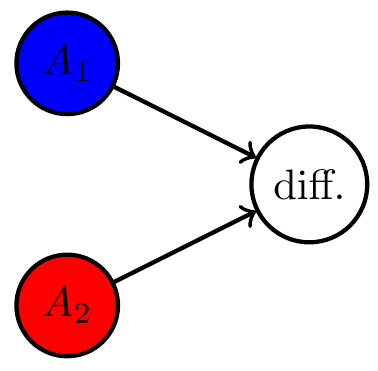
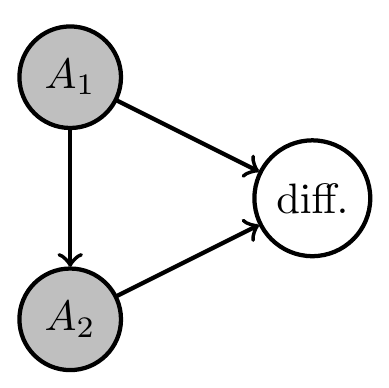
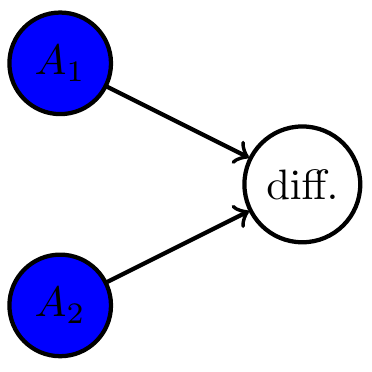
- Concrete example of agent manifold reduction under switch from single agent to multi-agent to identical multi-agent setup
- Like matching pennies but single goal: "different outcome"
- solution: one action/player always plays heads and one always tails
- agent manifold:
- single-agent manifold would be whole simplex
- multi-agent manifold is independence manifold
- multi-agent manifold with shared kernel is submanifold of independence manifold
- Like matching pennies but single goal: "different outcome"
Cooperative games
Multi-agents and games
- Relevance to project:
- dealing with multi-agent and multiple, possibly competing goals is a main goal of the project
- basis for studying communication and interaction
- basis for scaling up number of agents
- basis for understanding advantages of multi-agent setups
Uncertain (PO)MDP
- Assume
- (as usual) transition kernel of environment is constant over time, but
- we are uncertain about what is the transition kernel
- How can we reflect this in our setup / PAI?
- Can we find agent kernels that solve problem in a way that is robust against variation of those transition kernels?
Uncertain (PO)MDP
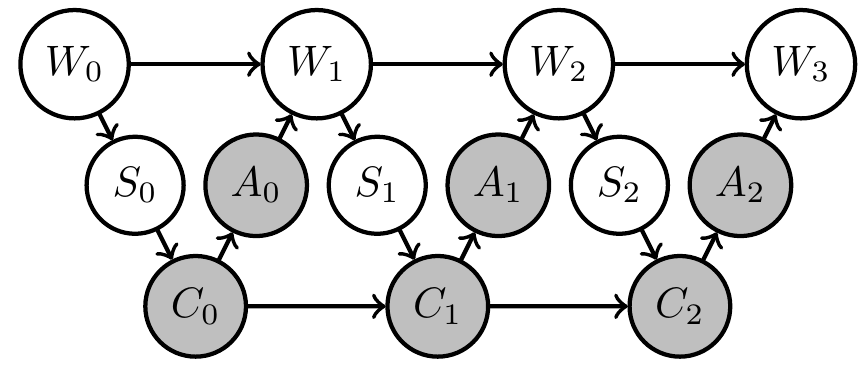
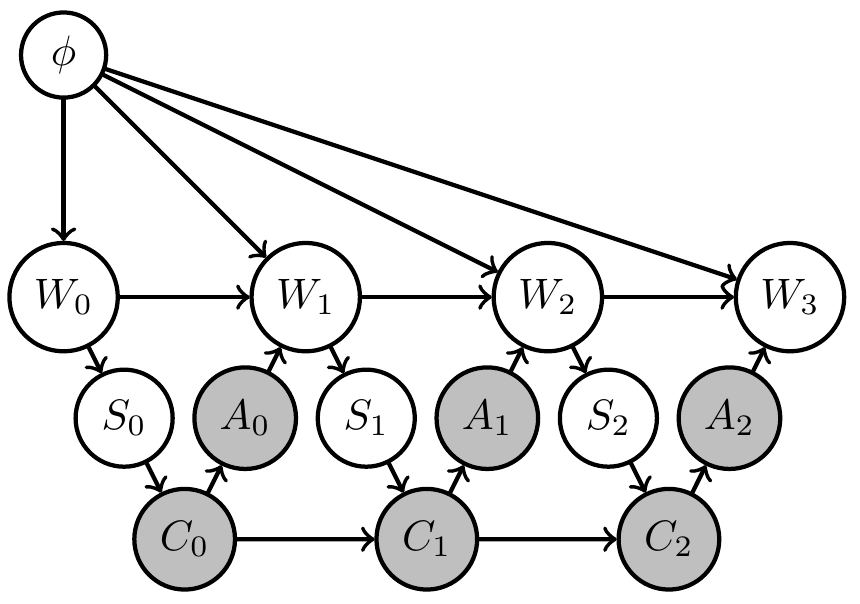
- Extend original (PO)MDP Bayesian network with two steps:
- parametrize environment transition kernels by shared parameter \(\phi\):
\[\bar{p}(x_e|x_{\text{pa}(e)}) \to \bar{p}_\phi(x_e|x_{\text{pa}(e)},\phi)\] - introduce prior distribution \(\bar{p}(\phi)\) over environment parameter
- parametrize environment transition kernels by shared parameter \(\phi\):
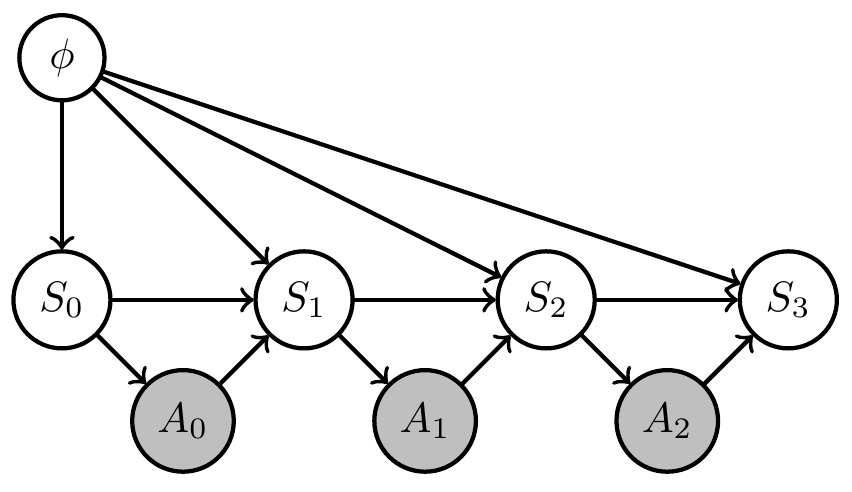
Uncertain (PO)MDP
- Same structure can be hidden in original network but in this way becomes a requirement/constraint
- If increasing goal probability involves actions that resolve uncertainty about the environment then PAI finds those actions!
- PAI results in curious agent kernels/policy.
Uncertain (PO)MDP
- Same structure can be hidden in original network but in this way becomes a requirement/constraint
- If increasing goal probability involves actions that resolve uncertainty about the environment then PAI finds those actions!
- PAI results in curious agent kernels/policy.
Uncertain (PO)MDP
-
Relevance for project:
- agents that can achieve goals in unknown / uncertain environments are important for AGI
- related to meta-learning
- understanding knowledge and uncertainty representation is important for agent design in general
Related project funded
- John Templeton Foundation has funded related project titled: Bayesian agents in a physical world
- Goal:
- What does it mean that a physical system (dynamical system) contains a (Bayesian) agent?
Related project funded
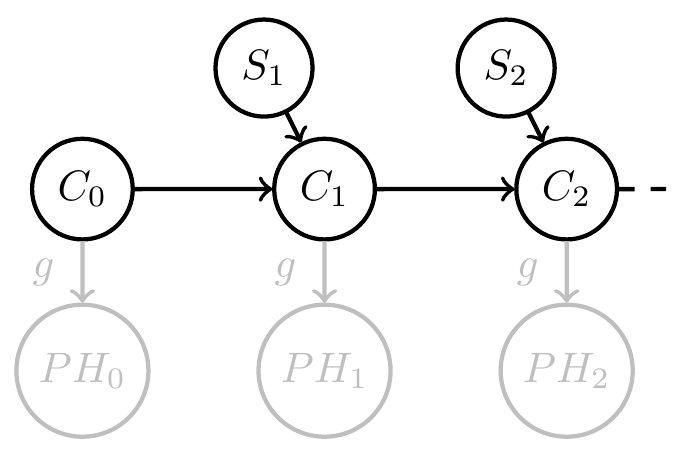
- Starting point:
- given system with inputs defined by
\[f:C \times S \to C\] - define a consistent Bayesian interpretation as:
- model / Markov kernel \(q: H \to PS\)
- interpretation function \(g:C \to PH\)
such that
\[g(c_{t+1})(h)=g(f(c_t,s_t))(h)=\frac{q(s_t|h) g(c_t)(h)}{\sum_{\bar h} q(s_t|\bar h) g(c_t)(\bar h)} \]
- given system with inputs defined by
Related project funded
- more suggestive notation:
\[g(h|c_{t+1})=g(h|f(c_t,s_t))=\frac{q(s_t|h) g(h|c_t)}{\sum_{\bar h} q(s_t|\bar h) g(\bar h|c_t)} \] - but note: \(PH_i\) are deterministic random variables and need no extra sample space
- \(H\) isn't even a deterministic random variable (what???)
Related project funded
- Take away message :
- Formal condition for when a dynamical system with inputs can be interpreted as consistently updating probabilistic beliefs about the causes of its inputs (e.g. environment)
- Extensions to include stochastic systems, actions, goals, etc. ongoing...
Related project funded
- Relevance for project
- deeper understanding of relation between physical systems and agents will also help in thinking about more applied aspects
- a lot of physical agents are made of smaller agents and grow / change their composition, understanding this is also part of the funded project and is also directly relevant for the point "dynamical scalability of multi-agent systems" in the proposal
Two kinds of uncertainty
- Designer uncertainty:
- model our own uncertainty about environment when designing the agent to make it more robust / general
- Agent uncertainty:
- constructing an agent that uses specific probabilistic belief update method
- exact Bayesian belief updating (exponential families and conjugate priors)
- approximate belief updating (VAE world models?)
- constructing an agent that uses specific probabilistic belief update method
Two kinds of uncertainty
- Designer uncertainty:
- introduce hidden parameter \(\phi\) with prior \(\bar p(\phi)\) among fixed kernels
- planning as inference finds agent kernels / policy that deal with this uncertainty
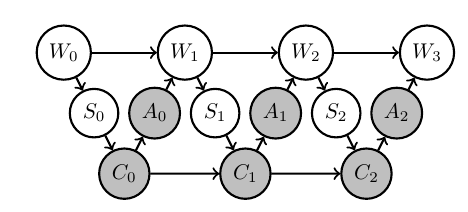
Two kinds of uncertainty
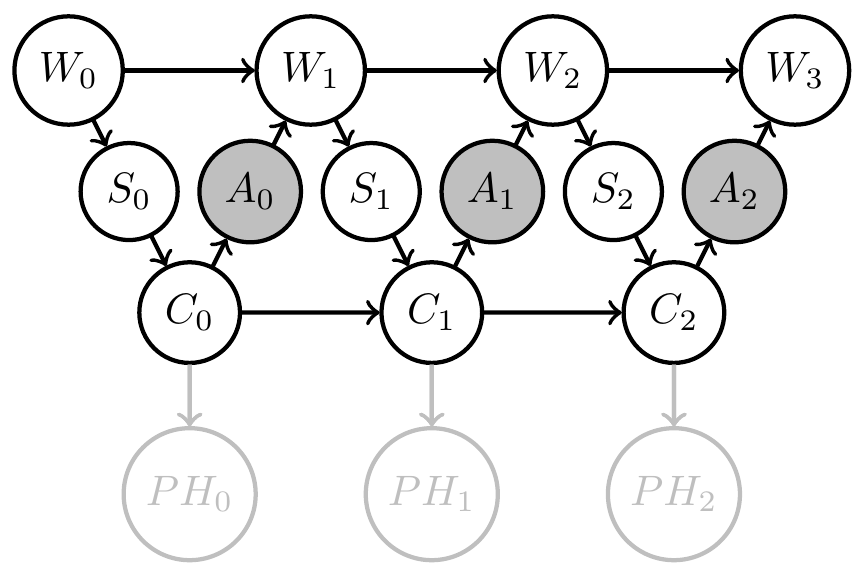
- Agent uncertainty:
- In perception-action loop:
- construct agent's memory transition kernels that consistently update probabilistic beliefs about their environment
- these beliefs come with uncertainty
- can turn uncertainty reduction itself into a goal!
- In perception-action loop:
Two kinds of uncertainty
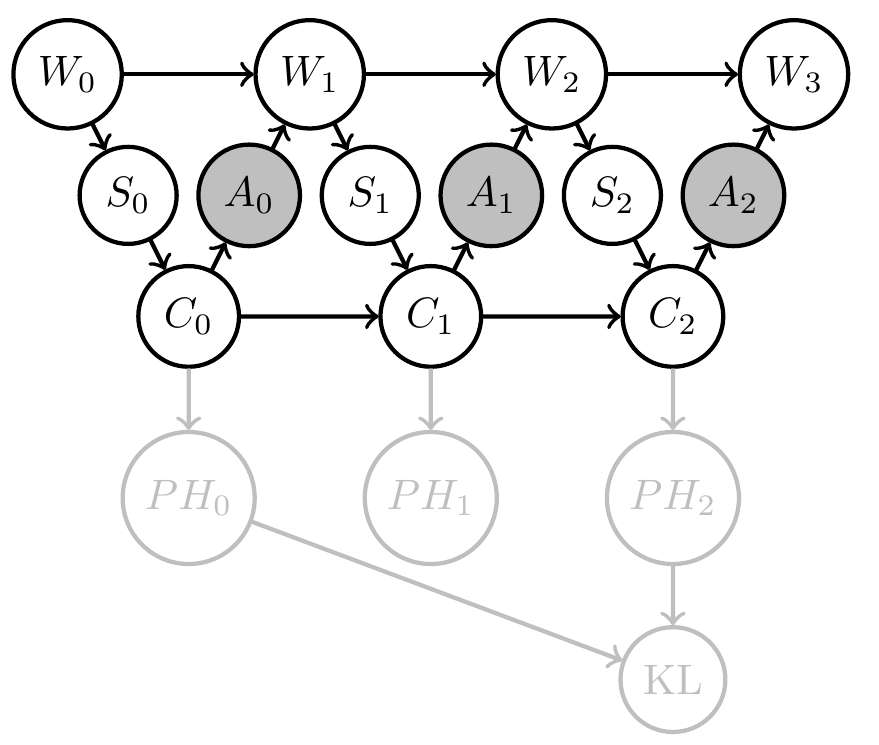
- Agent uncertainty:
- E.g: Define goal event via information gain :
\[G=1 \Leftrightarrow D_{KL}[PH_2(x)||PH_0(x)] > d\] - PAI solves for policy that employs agent memory to gain information / reduce its uncertainty by \(d\) bits
- E.g: Define goal event via information gain :
Two kinds of uncertainty
-
Relevance for project:
- taking decisions based on agent's knowledge is part of the project
Preliminary work
- Implementation of PAI in state of the art software (e.g. using Pyro)
- Planning to learn / uncertain MDP, bandit example.
- Do some agents have no interpretation e.g. the "Absent minded driver"? Collaboration with Simon McGregor.
- Design independence: some problems can be solved even if kernels are chosen independently others require coordinated choice of kernels, some are in between.
- Bayesian networks cannot change their structure dependent on the states of the contained random variables.
Preliminary work
- Implementation of PAI in state of the art software (e.g. using Pyro)
- Proofs of concept coded up in Pyro
- uses stochastic variational inference (SVI) for PAI instead of geometric EM
- may be useful to connect to work with neural networks since based on PyTorch
- For simple cases and visualizations also have Mathematica code
Preliminary work
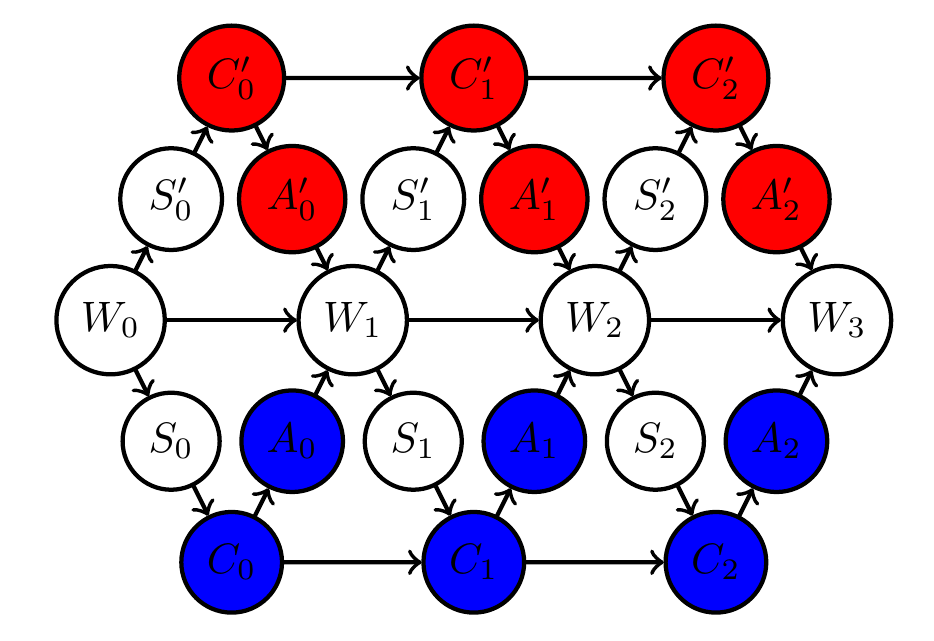
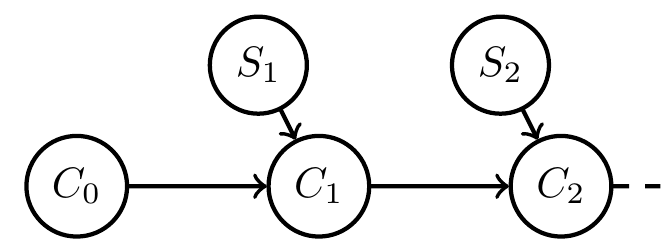
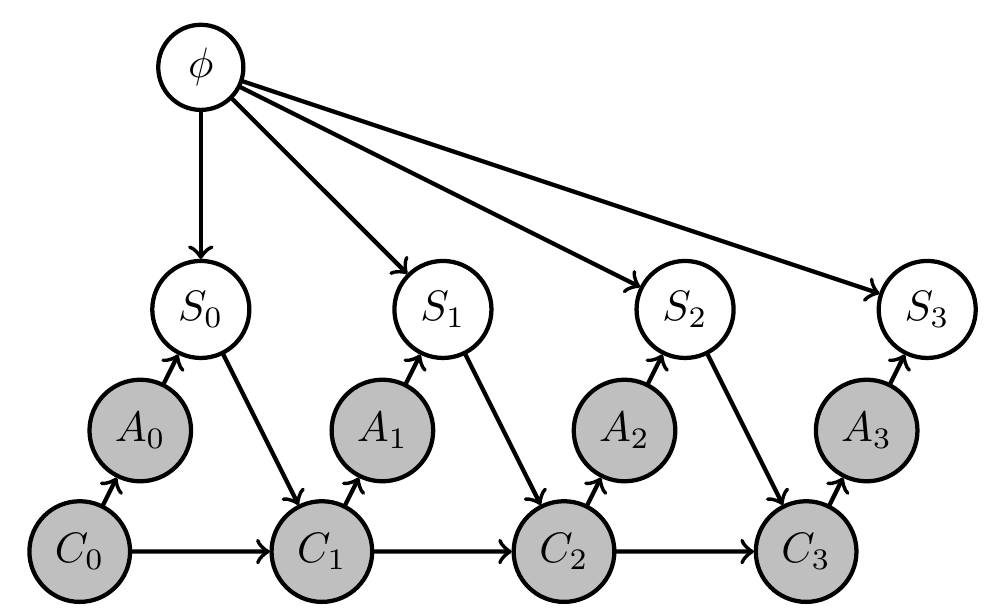
2. Planning to learn / uncertain MDP, bandit example.
- currently investigating PAI for one armed bandit
- goal event is \(G=S_3=1\)
- actions choose one of two bandits that have different win probabilities determined by \(\phi\)
- agent kernels can use memory \(C_t\) to learn about \(\phi\)
Preliminary work
- Do some agents have no interpretation e.g. the "Absent minded driver"? Collaboration with Simon McGregor.
- Driver has to take third exit
- all agent kernels share parameter \(\theta = \)probability of exiting
- optimal is \(\theta= 1/3\)
- Is this an agent even though it may have no consistent intepretation?
Preliminary work
- Design independence:
- some problems can be solved even if kernels are chosen independently
- others require coordinated choice of kernels,
- some are in between.
- Two player penny game
- goal is to get different outcomes
- one has to play heads with high probability the other has to play tails
- can't choose two kernels independently
Preliminary work
- Bayesian networks cannot change their structure dependent on the states of the contained random variables.
- Once we fix the (causal) Bayesian network it stays like that ...
if x=1
Preliminary work
- Bayesian networks cannot change their structure dependent on the states of the contained random variables.
- Once we fix the (causal) Bayesian network it stays like that ...
if x=1
But for adding and removing agents probably needed
Preliminary work
- Bayesian networks cannot change their structure dependent on the states of the contained random variables.
- Once we fix the (causal) Bayesian network it stays like that ...
- We are learning about modern ways to deal with such changes dynamically -- polynomial functors.
Thank you for your attention!
Uncertain MDP / RL
- In RL and RL for POMDPs the transition kernels of the environment are considered unknown / uncertain
Two kinds of uncertainty
- Saw before that we can derive policies that deal with uncertainty
- This uncertainty can be seen as the "designer's uncertainty"
- But we can also design agents that have models and come with their own well defined uncertainty
- For those we can turn uncertainty reduction itself into a goal!
Two kinds of uncertainty
- Agent uncertainty:
- e.g. for agent memory implement stochastic world model that updates in response to sensor values
- then by construction each internal state has a well defined associated belief distribution \(ph_t=f(c_t)\) over hidden variables
- turn uncertainty reduction itself into a goal!
- e.g. for agent memory implement stochastic world model that updates in response to sensor values
Copy of deck
By slides_martin



