


Stefan Sommer
Professor at Department of Computer Science, University of Copenhagen
Stefan Sommer, University of Copenhagen
Faculty of Science, University of Copenhagen
MSJ-SI, Kyushu University, February 2026
w/ Frank v.d. Meulen, Erlend Grong, Rasmus Nielsen, Christy Hipsley, Sofia Stoustrup, Libby Baker, Gefan Yang, Michael Severinsen, Jingchao Zhou
Villum foundation
Novo nordisk foundation
University of Copenhagen
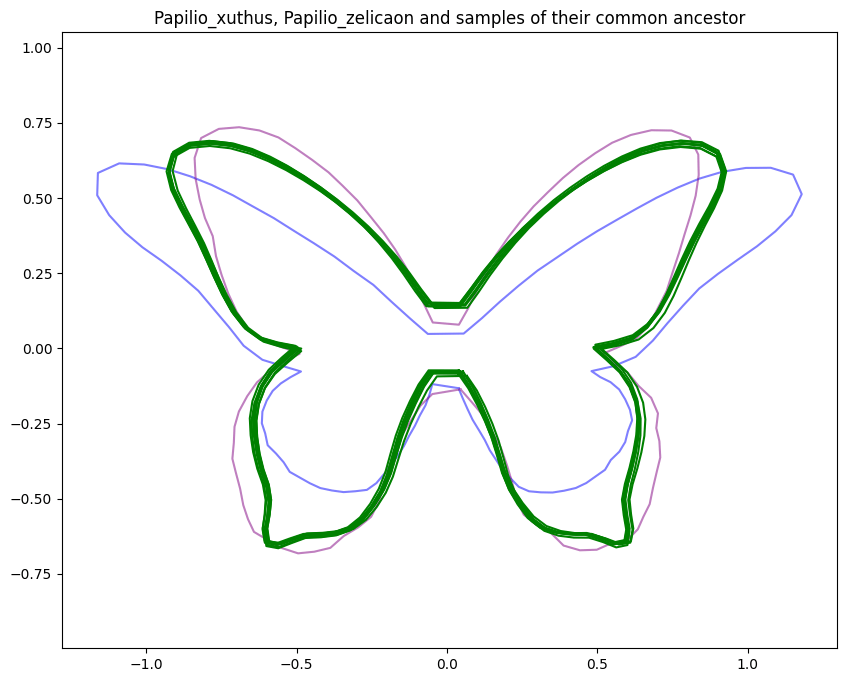
Center for Computational Evolutionary Morphometrics
w/ Rasmus Nielsen
Brown. motion
Brown. motion
Brown. motion
Brown. motion
branch (independent children)
incorporate leaf observations \(x_{V_T}\) into probabilistic model:
\(p(X_t|x_{V_T})\)
Brown. motion
Brown. motion
Brown. motion
Brown. motion
1) What is a shape Brownian motion?
2) How do we condition the nonlinear process on shape observations?
3) How do we perform inference in the full model?
Stochastic processes that
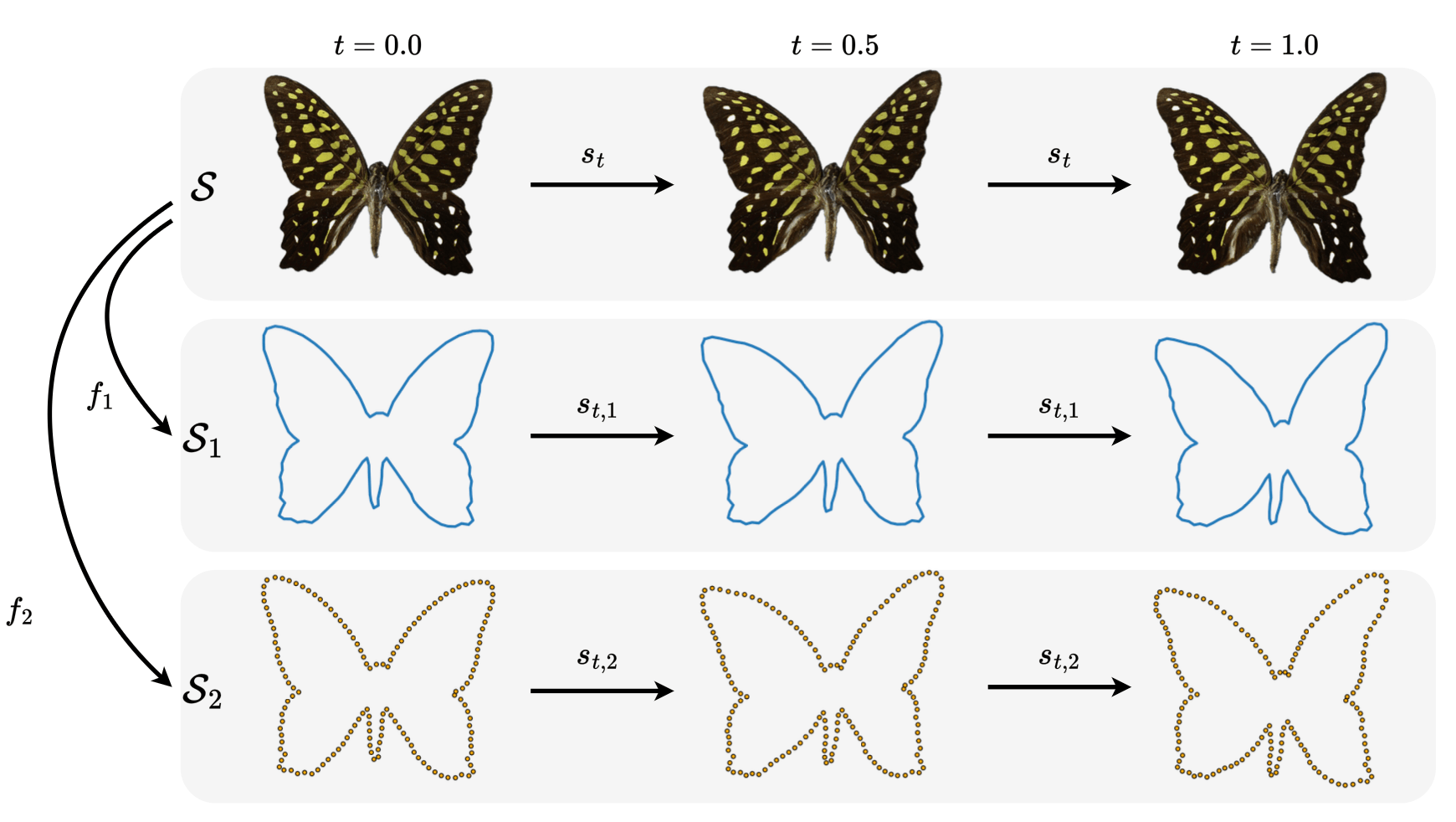
action: \(\phi.s=\phi\circ s\) (shapes)
\(\phi.s=s\circ\phi^{-1}\) (images)
\( \phi \)
\( \phi \) warp of domain \(\Omega\) (2D or 3D space)
landmarks: \(s=(x_1,\ldots,x_n)\)
curves: \(s: \mathbb S^1\to\mathbb R^2\)
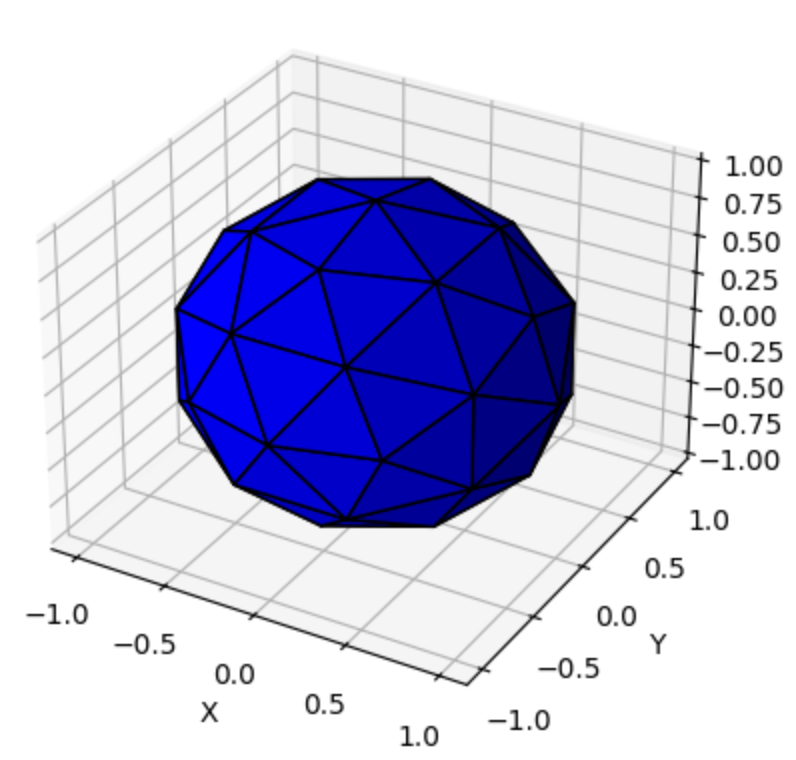
surfaces: \(s: \mathbb S^2\to\mathbb R^3\)
\( \phi_t:[0,T]\to\mathrm{Diff}(\Omega) \) path of diffeomorphisms (parameter t)
LDDMM: Grenander, Miller, Trouve, Younes, Christensen, Joshi, et al.
Markussen,CVIU'07; Budhiraja,Dupuis,Maroulas,Bernoulli'10
Trouve,Vialard,QAM'12;Vialard,SPA'13;Marsland/Shardlow,SIIMS'17
Arnaudon,Holm,Sommer,IPMI'17; FoCM'18; JMIV'19
Arnaudon,v.d. Meulen,Schauer,Sommer'21
geodesic ODE
perturbed SDE
\(\phi_{s,t}:\mathbb{R}^d \times \Omega \to \mathbb{R}^d\), \(0 \le s \le t\) indexed family of random fields s.t. for each \(s,t,\omega\), the map \(\phi_{s,t}(\cdot,\omega):\mathbb{R}^d \to \mathbb{R}^d\) is measurable.
The family is called a stochastic flow if
1. \(s,t,x \mapsto \phi_{s,t}(x)\) is continuous in \(s,t,x\) in probability,
2. \(\phi_{s,s} = \mathrm{Id}_{\mathbb{R}^d}\) for all \(s\),
3. \(\phi_{s,t} \circ \phi_{t,u} = \phi_{s,u}\) for all \(s \le t \le u\).
If increments \(\phi_{t_i,t_{i+1}}\) are independent for any \(0 \le t_0 \le t_1 \le \cdots \le t_n\) and \(\phi_{s,t}(x)\) is continuous in \(t\) a.s., then \(\phi_{s,t}\) is called a Brownian flow.
Local characteristics:
\[b_t(x) = \lim_{h \downarrow 0}\frac{1}{h}\mathbb{E}\big[\phi_{t,t+h}(x)-x\big]\qquad\qquad\qquad\ \]
\[a_t(x,y) = \lim_{h \downarrow 0}\frac{1}{h}\mathbb{E}\Big[(\phi_{t,t+h}(x)-x)(\phi_{t,t+h}(y)-y)^T\Big]\]
Kunita,'86,'97
Theorem: With additional assumptions, there exists a a version of \(\phi_{s,t}\) which is a Brownian flow of homeomorphisms.
Theorem: Let \(\phi_{s,t}\) be a Brownian flow of homeomorphisms. If \(b_t\) and \(a_t\) are \(C^l\) in \(x\) and \(y\) with bounded \(l\)th order derivatives in both \(x\) and \(y\) simultaneously, then \(\phi_{s,t}\) is a Brownian flow of \(C^{l-1}\) diffeomorphisms.
Let \(S_t\) be a \(C\)-valued semimartingale. \(S_t\) gives a stochastic differential equation \(d\phi_t=S_{dt}(\phi_t)\) of which a solution satisfies
\[\phi_t(x) = x + \int_s^t S_{dr}(\phi_r(x)) . (*)\] \(\int_s^t S_{dr}(\phi_r(x))\) is the stochastic integral of \(S_t\) with respect to \(\phi_t\).
Theorem: If \(\alpha,\beta\) are Lipschitz continuous with linear growth, then (*) has a unique solution with a modification that is a stochastic flow of diffeomorphisms.
Theorems of Kunita:
Kunita,'86,'97
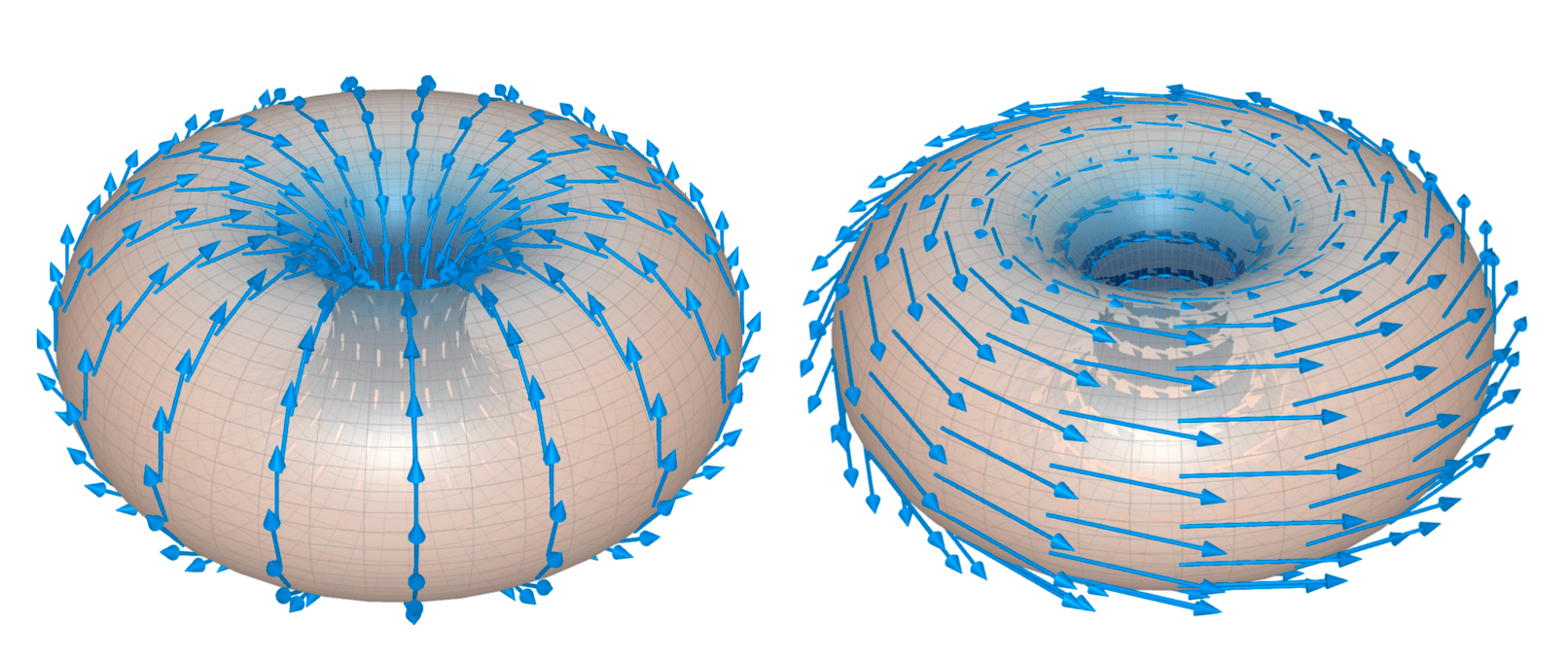
Diffeomorphism
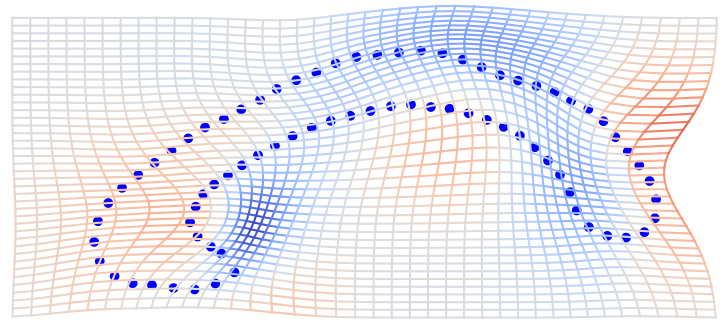
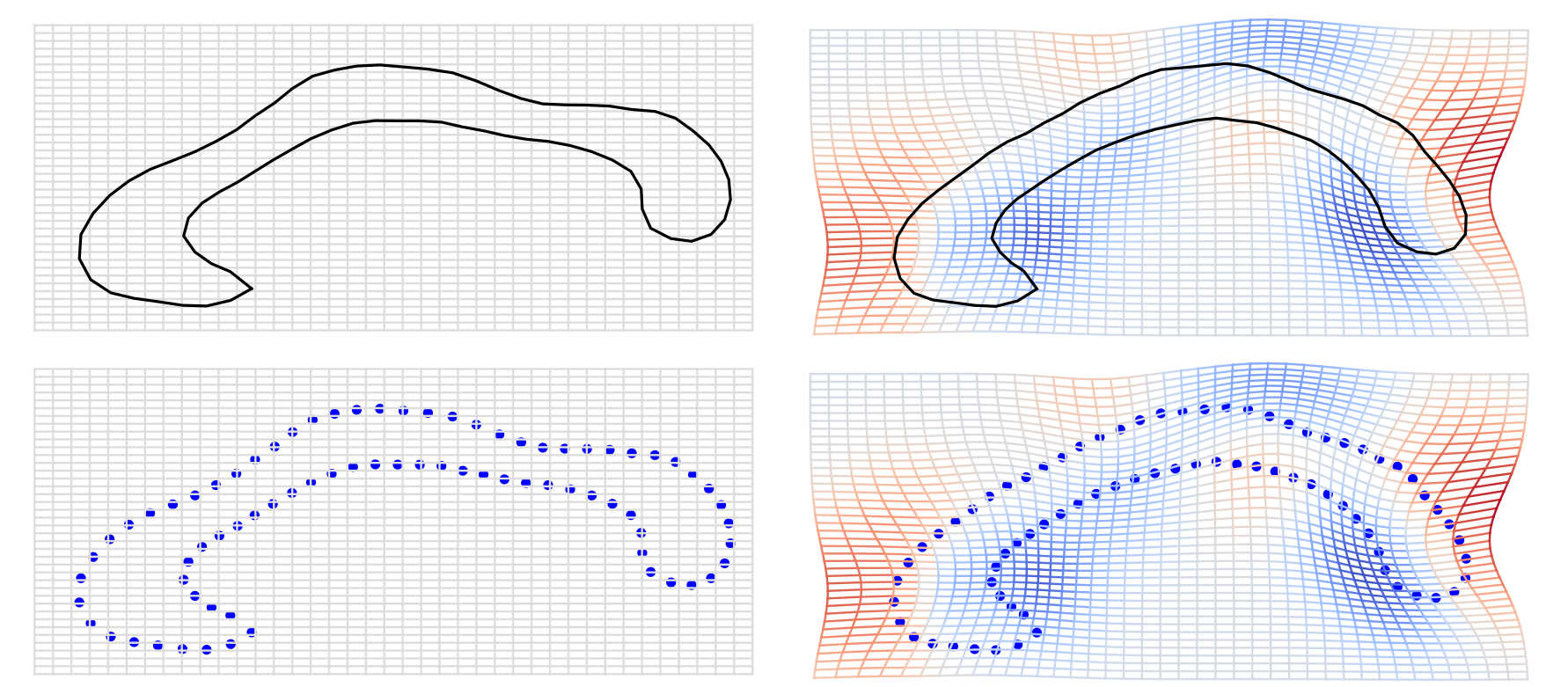
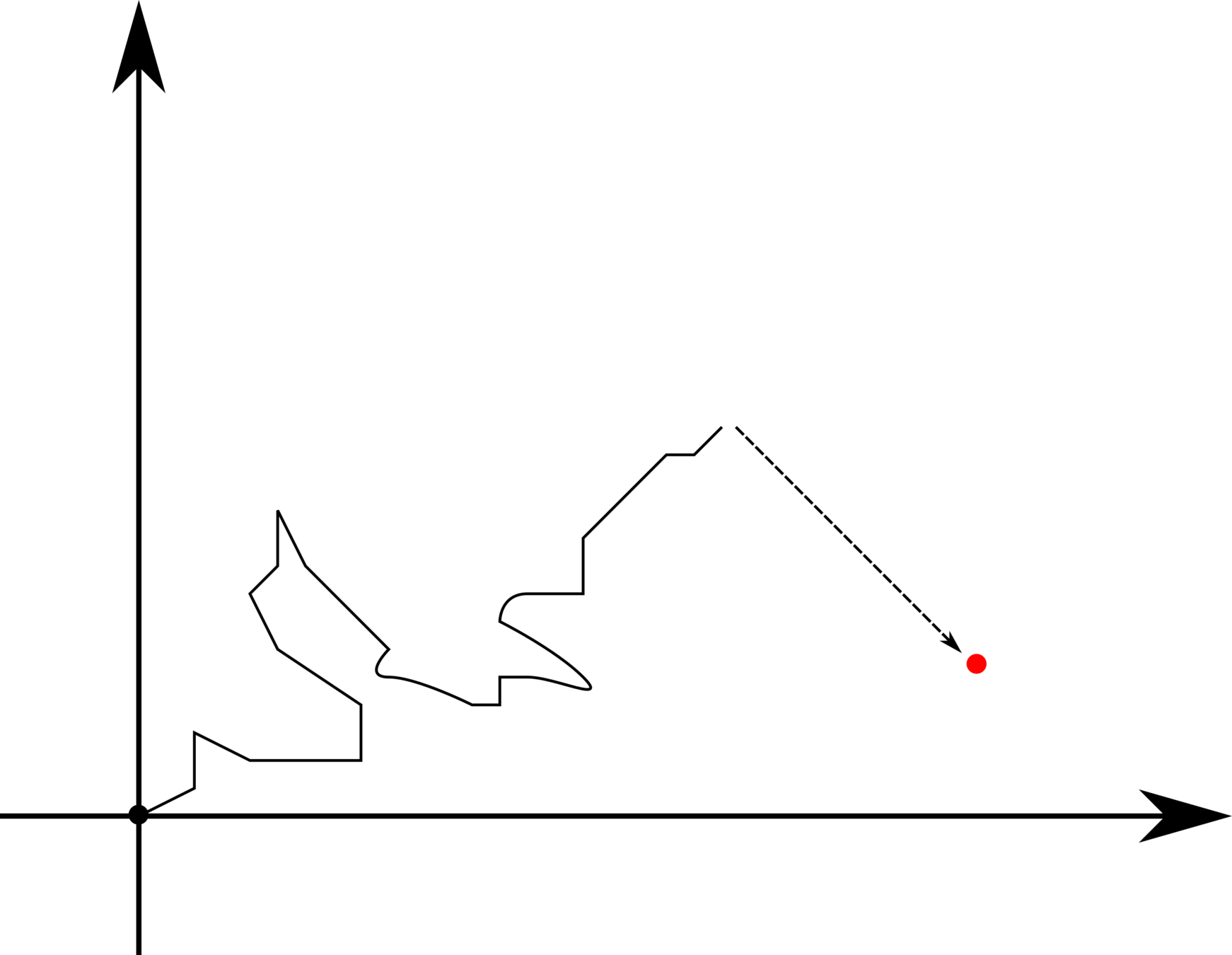
\[\phi_t(x)=x+X_t(x)\]Infinite noise Kunita flow:
\[dX_t = Q^{1/2}(X_t) \circ dW_t\]
\(Q^{1/2}(X_t)v(x) =\\\qquad \int_{D} k(\phi_t(x),y) v(y) \, dy\)
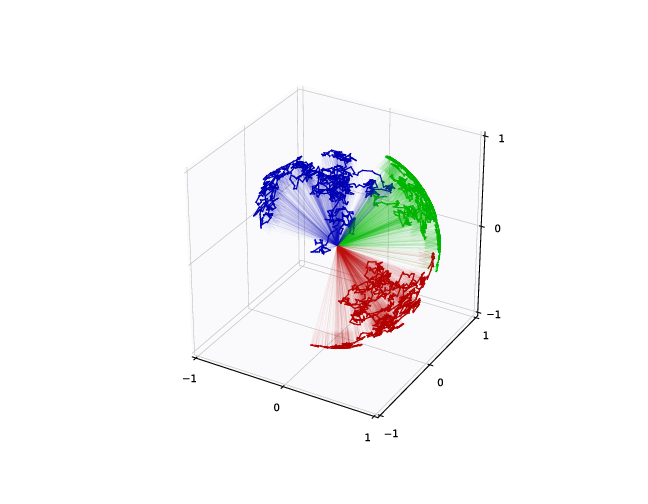
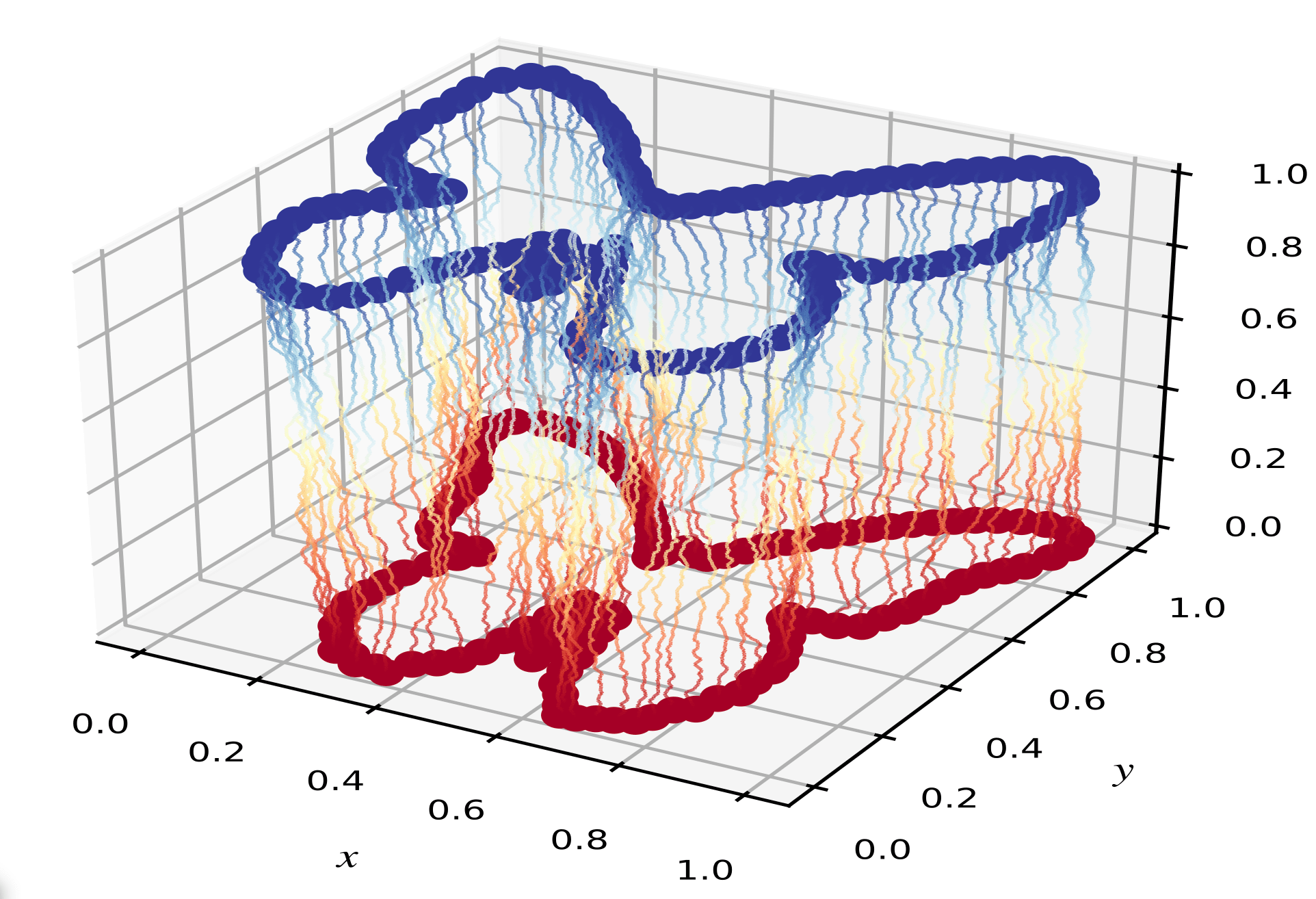
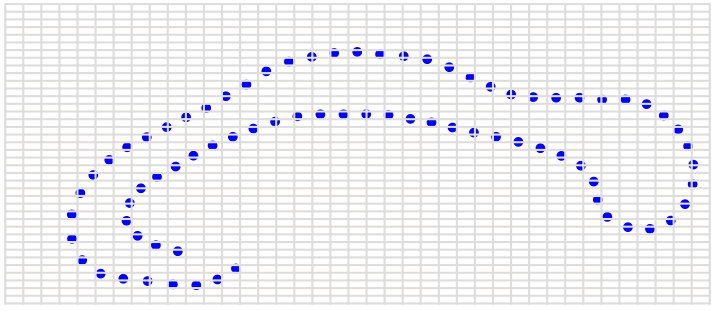
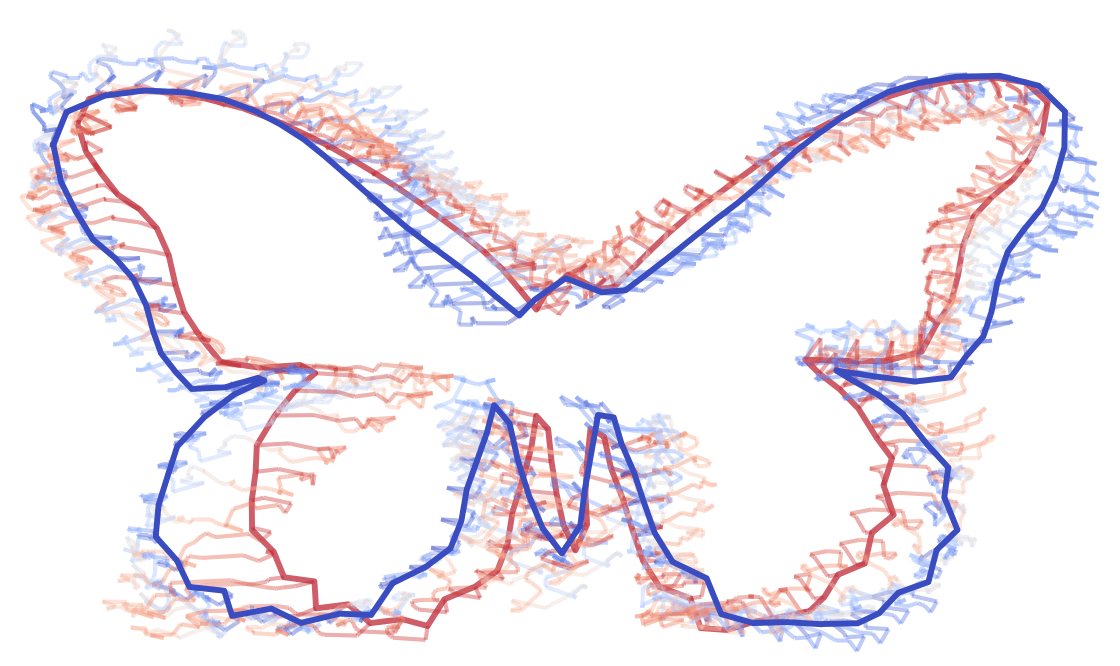
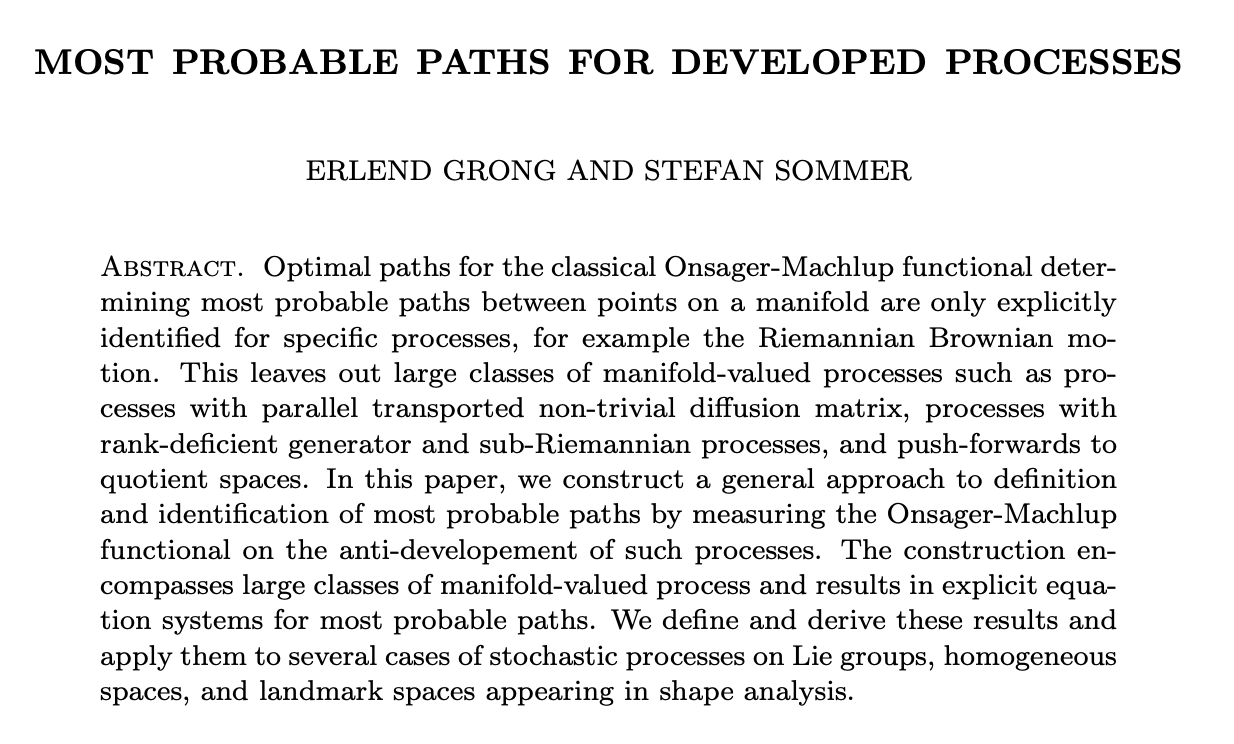
Landmark shape process:
\[dX_t=\sqrt{K(X_t)}\circ dW_t\]
Kernel matrix
\[K(X_t)^i_j=g(x_i,x_j)\]encodes landmark covariance
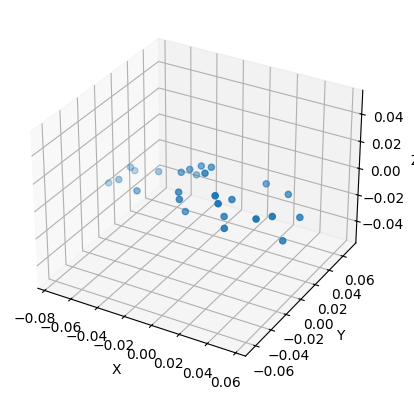
\(X_t\) landmarks at time \(t\):
\[X_t=\begin{pmatrix}x_{1,t}\\y_{1,t}\\\vdots\\x_{n,t}\\y_{n,t}\end{pmatrix}\]
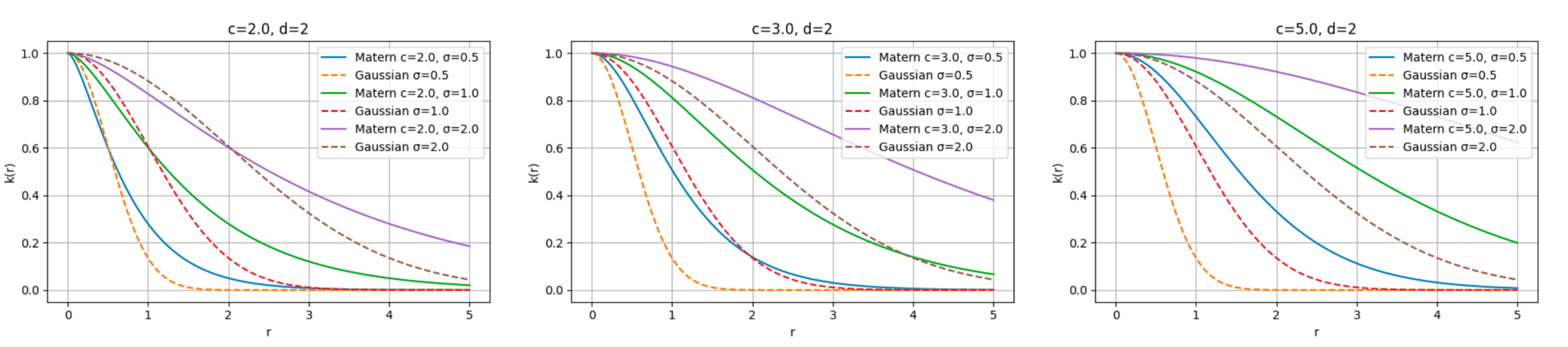
\(L=\alpha^{-1}(\mathrm{Id}-\sigma^2\Delta)^c\) \(k(r)=\alpha\frac{2^{1-\nu}}{\Gamma(\nu)}\left(\frac{r}{\sigma}\right)^\nu K_\nu\left(\frac{r}{\sigma}\right)\)
\(g(r)=\alpha^2 2^{\frac{3d}{2}-2c+1}\pi^{d/2}\sigma^d\frac{\Gamma(c)^2}{\Gamma(c-\frac{d}{2})^2\Gamma(2c)}\left(\frac{r}{\sigma}\right)^{2c-\frac{d}{2}}K_{2c-\frac{d}{2}}\left(\frac{r}{\sigma}\right)\)
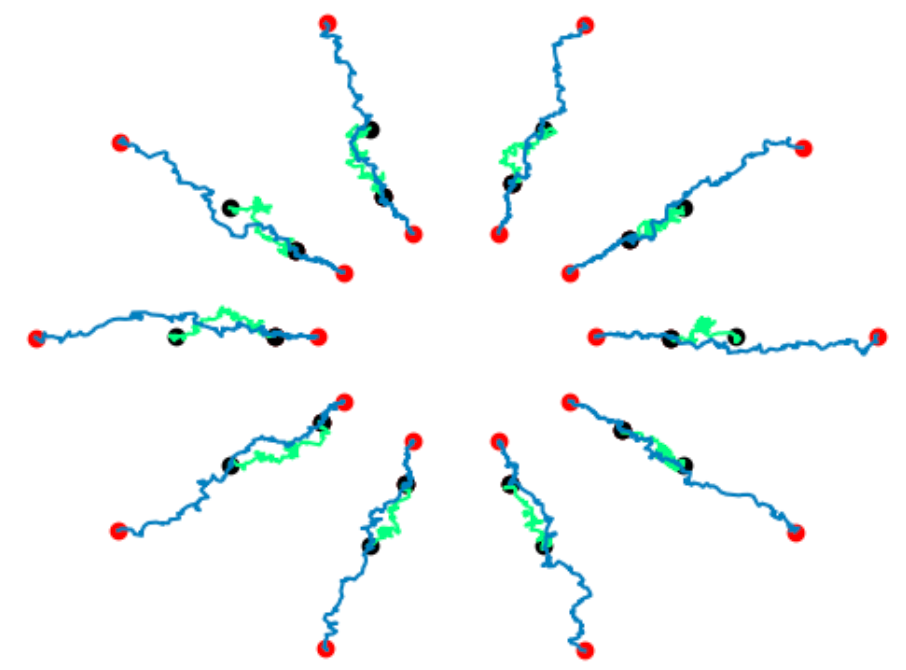
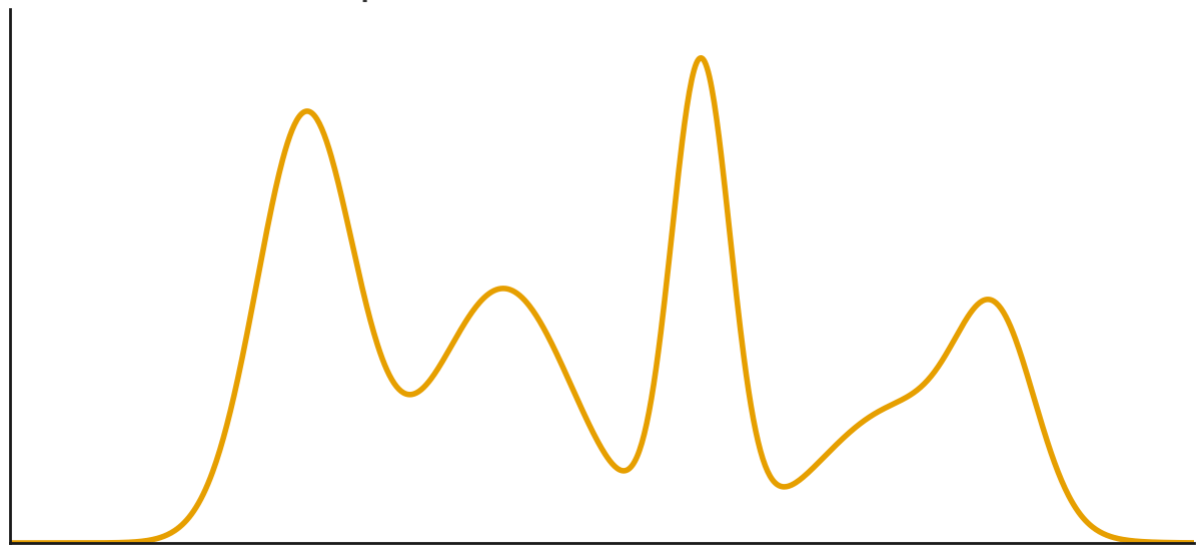
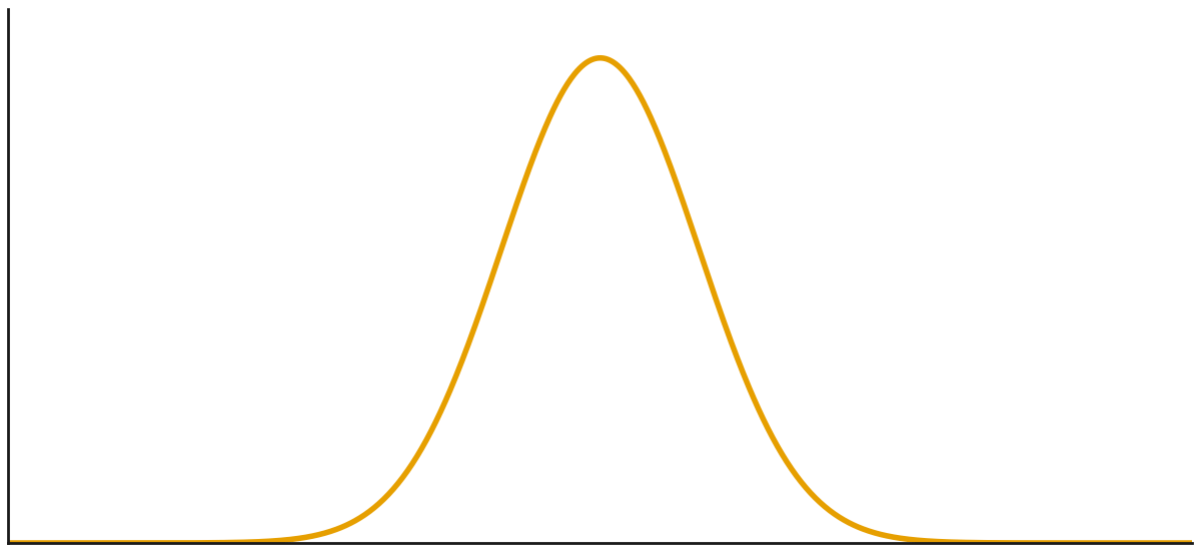
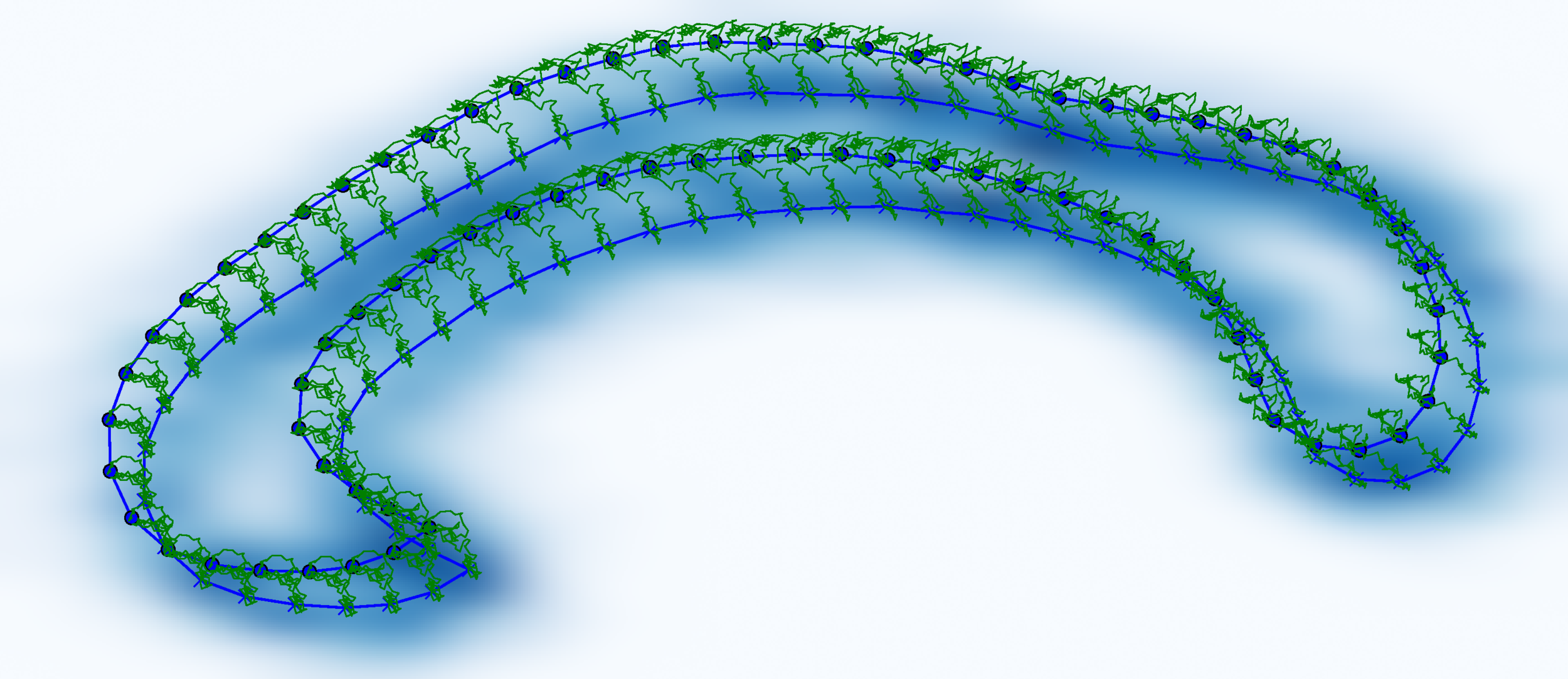
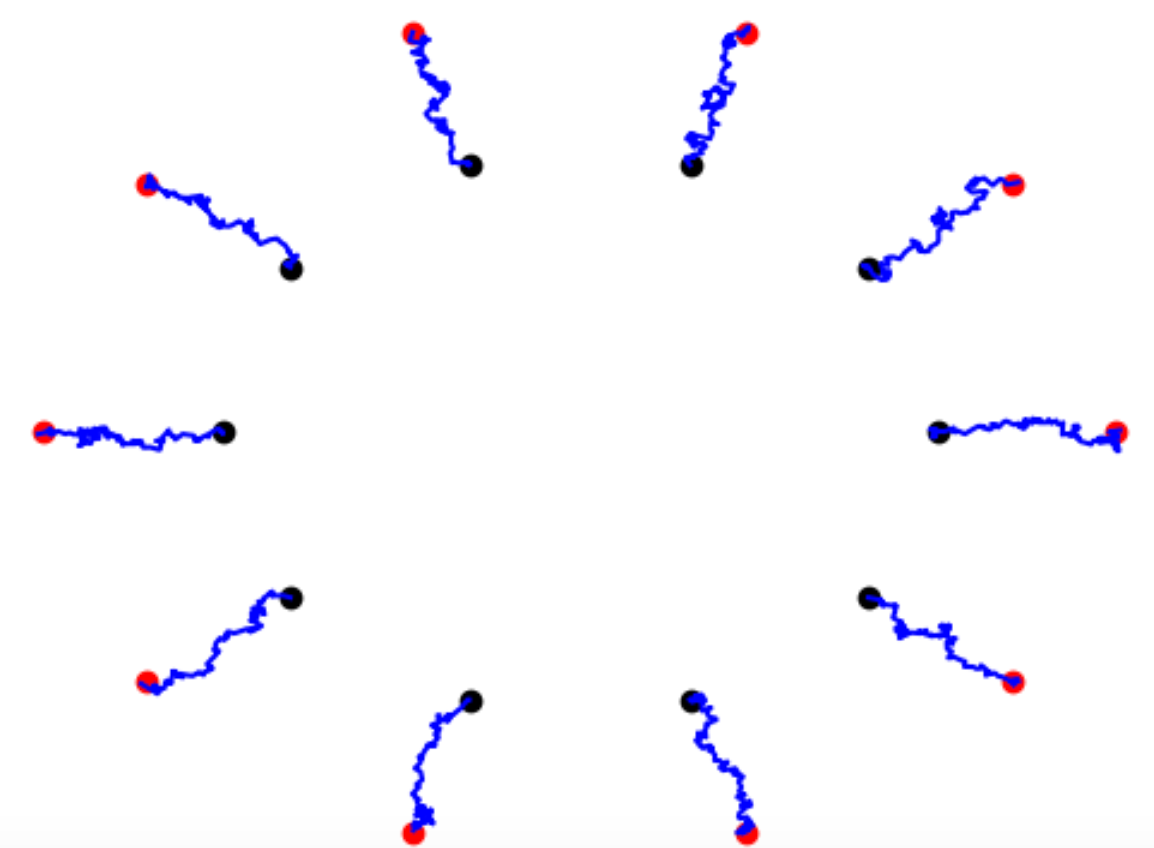
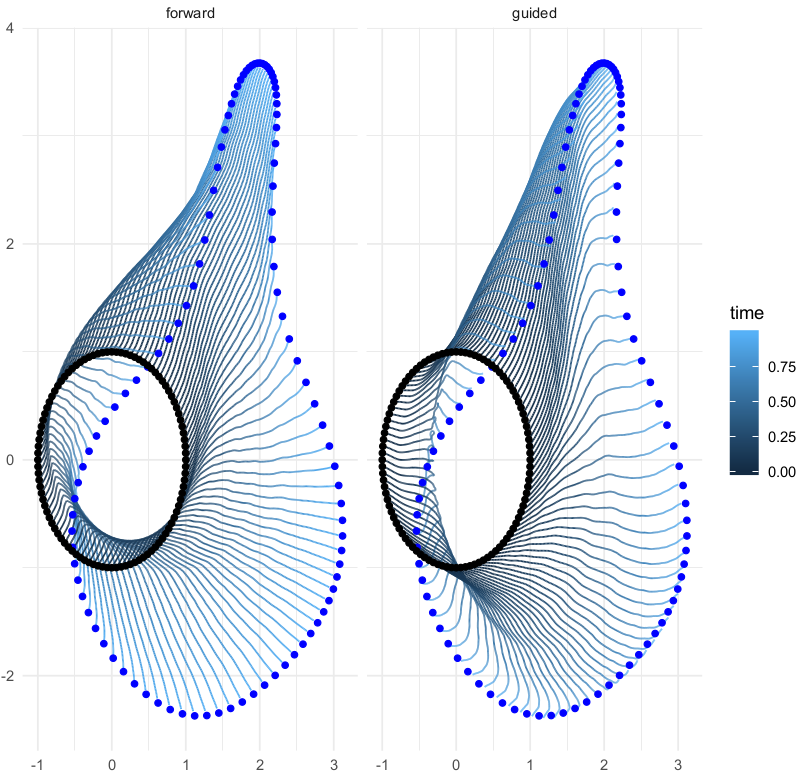
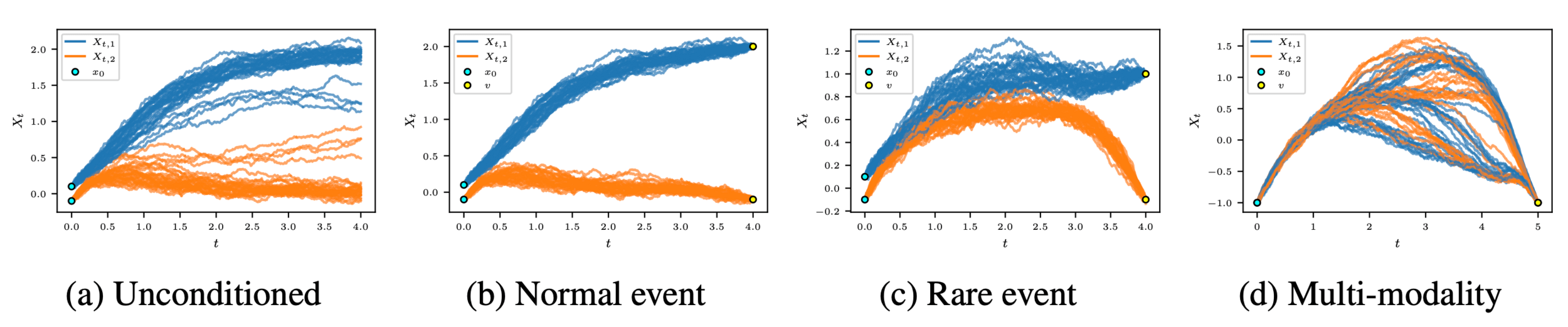
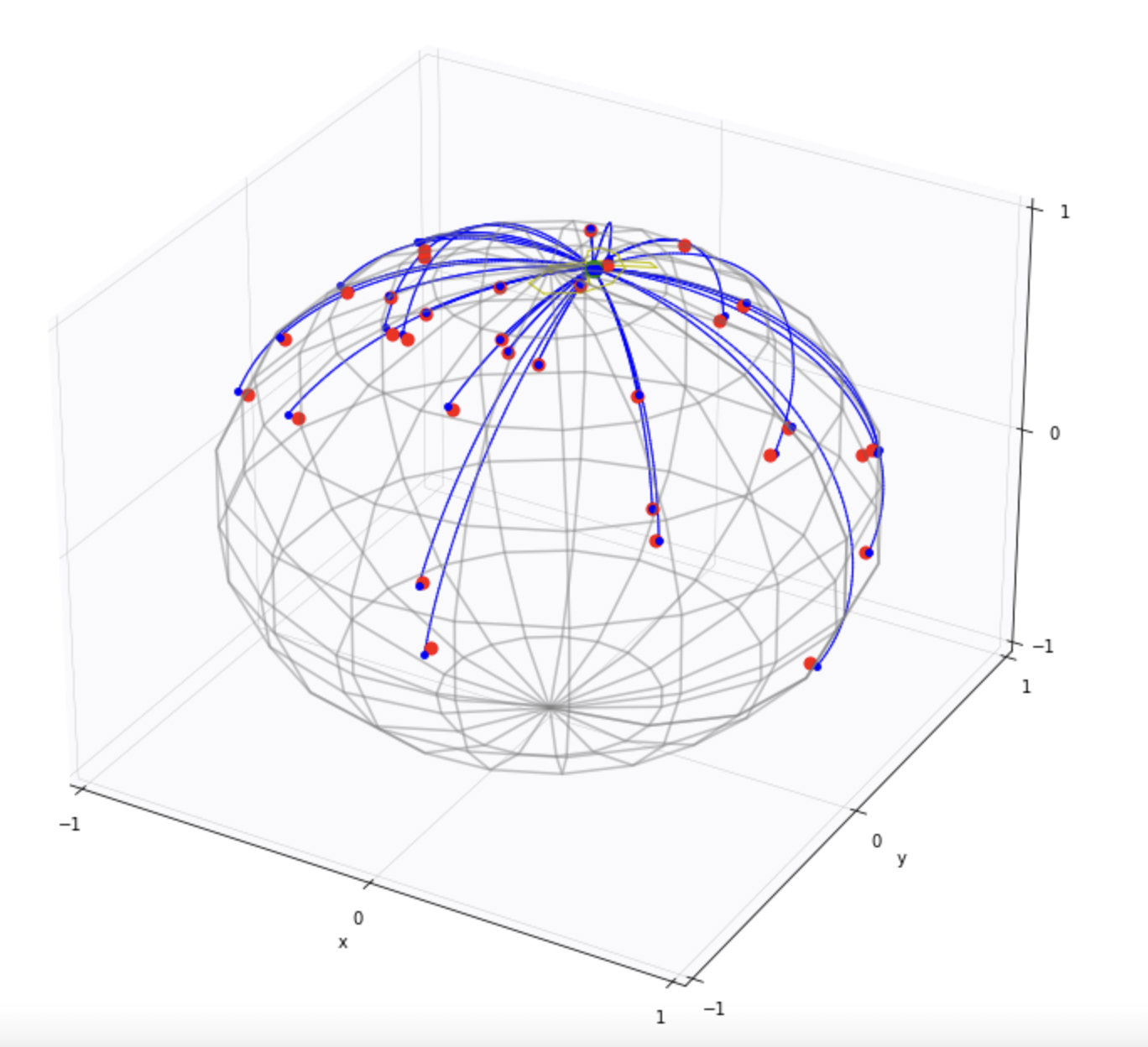
\(X_t\) (no conditioning)
\(X_t|X_T=v\) (conditioned)
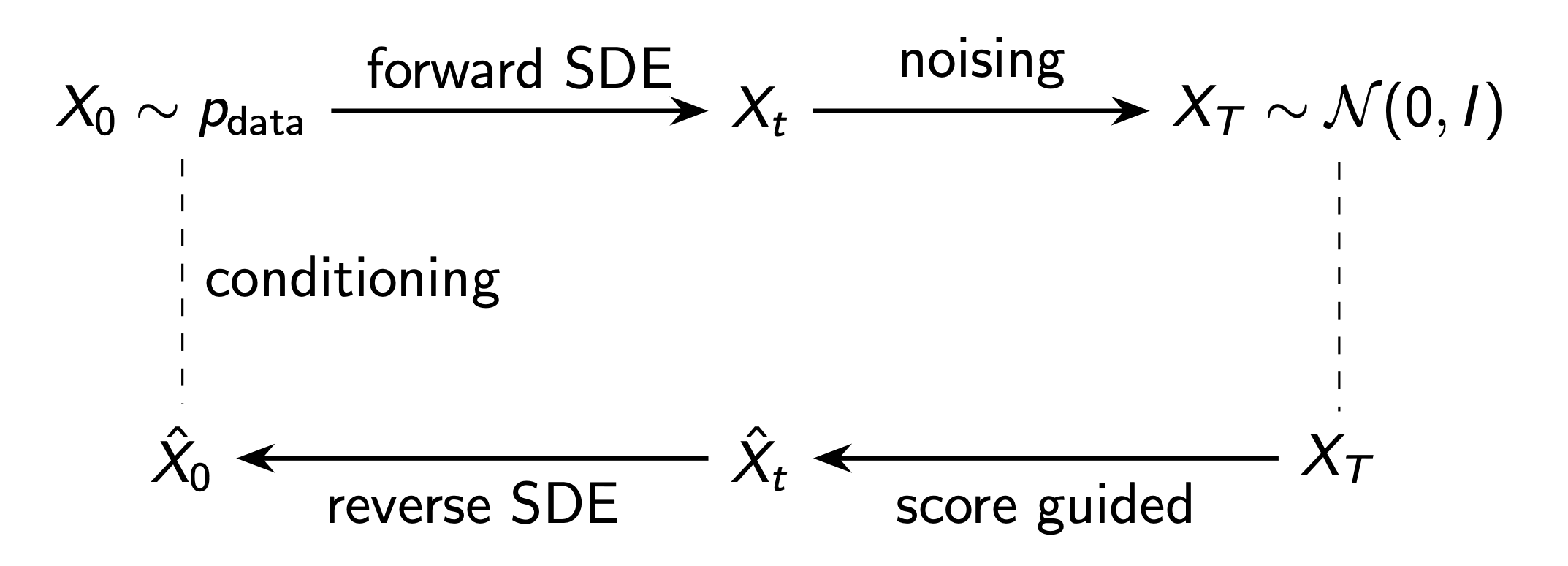
fit neural network \( s_\theta \) to minimize
\[\mathcal{L}(\theta)= \frac{1}{2} \sum_{m=1}^M \int_{t_{m-1}}^{t_m}\left[\big\| s_\theta(t, x_t)-\nabla\log p(x_{t},t\mid x_{t_{m-1}},t_{m-1})\big\|_{a(t,x_t)}^2\right] dt\]
plug \( s_\theta \) into SDE to sample: \[ dx_t = b(t,x_t)dt +a(t,x_t)s_\theta(t,x_t) dt + \sigma(t,x_t)\,dW_t \]
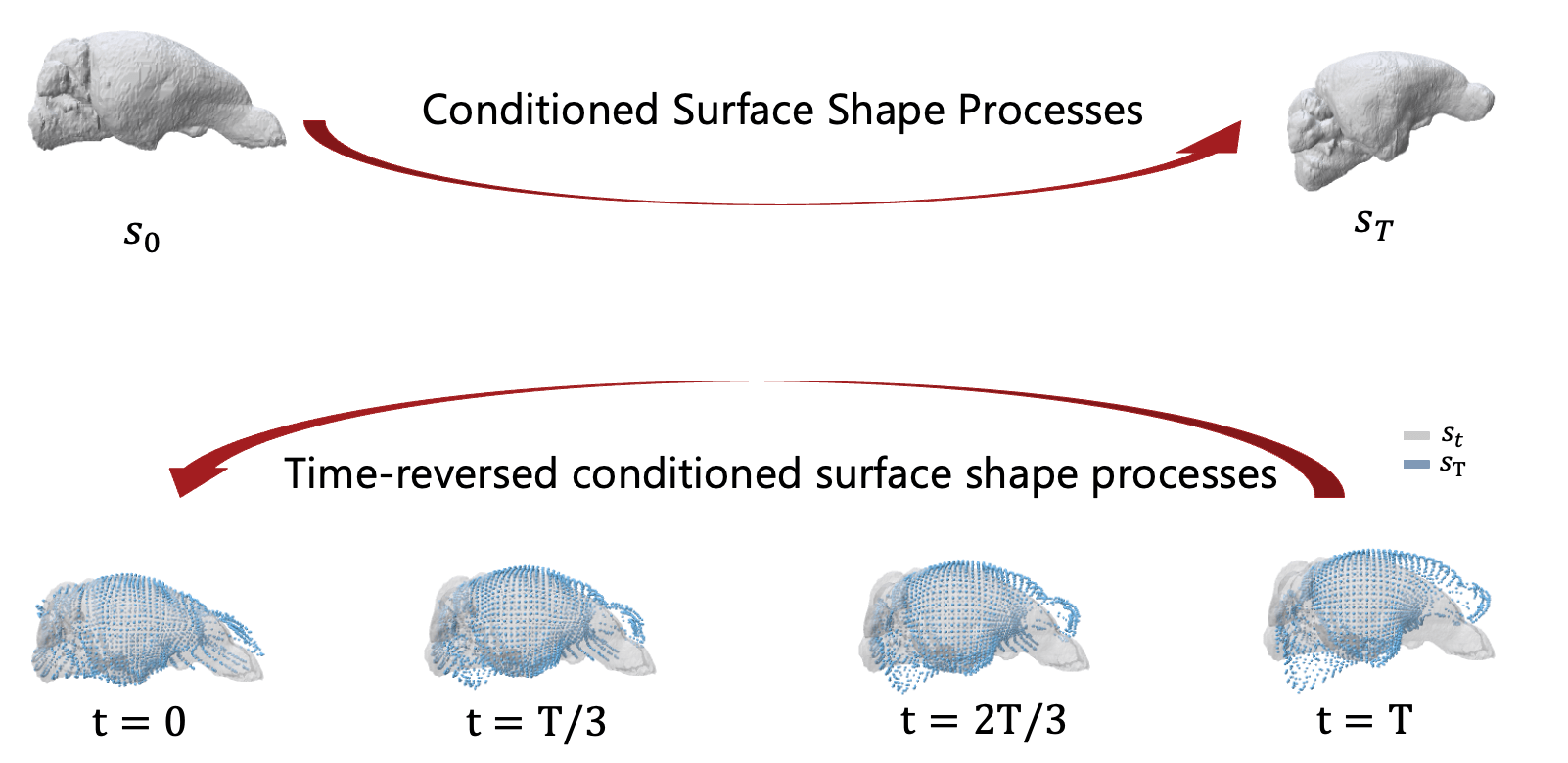
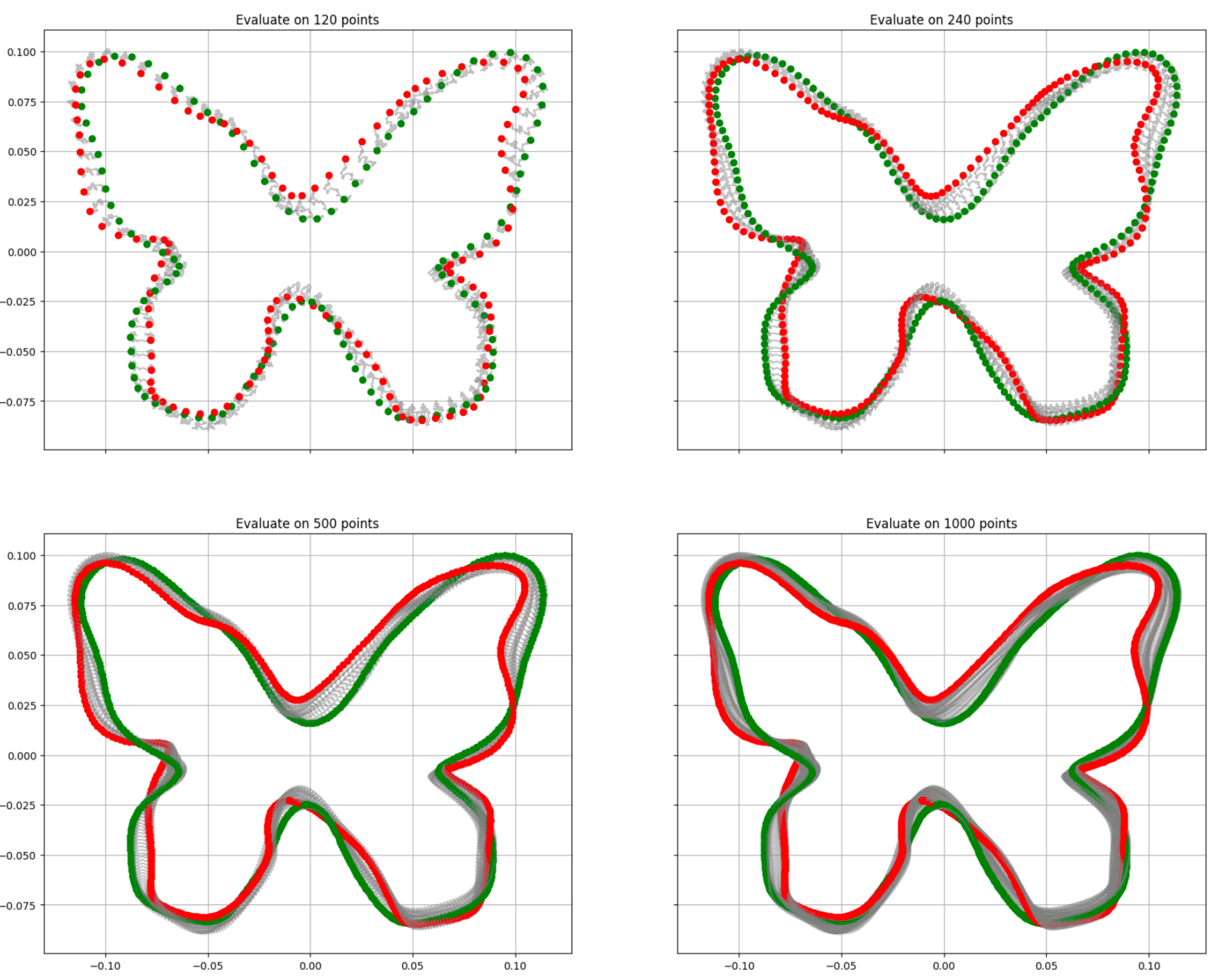
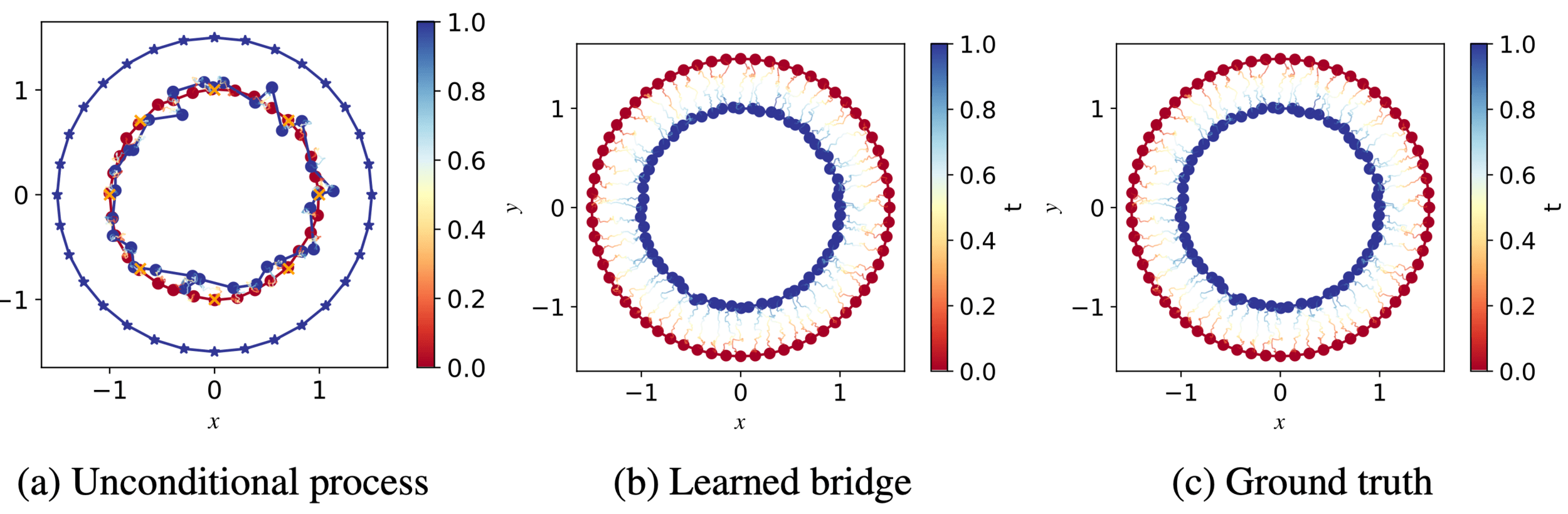
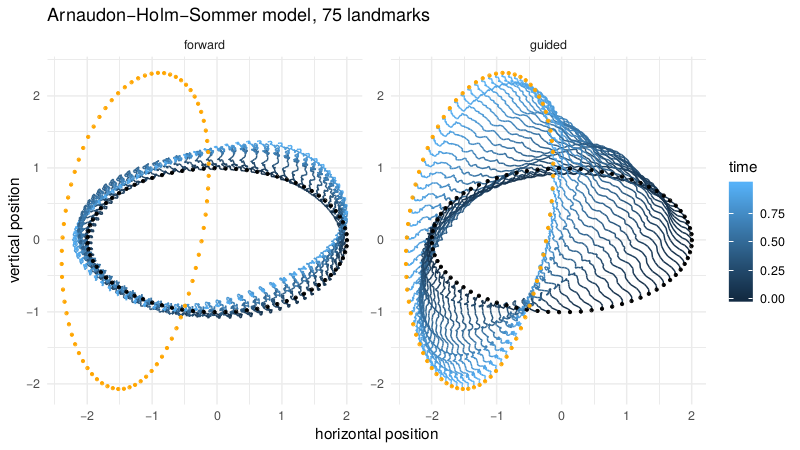
Train a neural network to learn the score in the bridge SDE in inf. dim.
\[dx_t=b(t,x_t)dt+a(t,x_t)\nabla_x\log \rho(t,x_t)dt\\+\sigma(t,x_t)dW_t\]particularly for shape Kunita flows
Zhou,Yang,Sommer,GSI'25
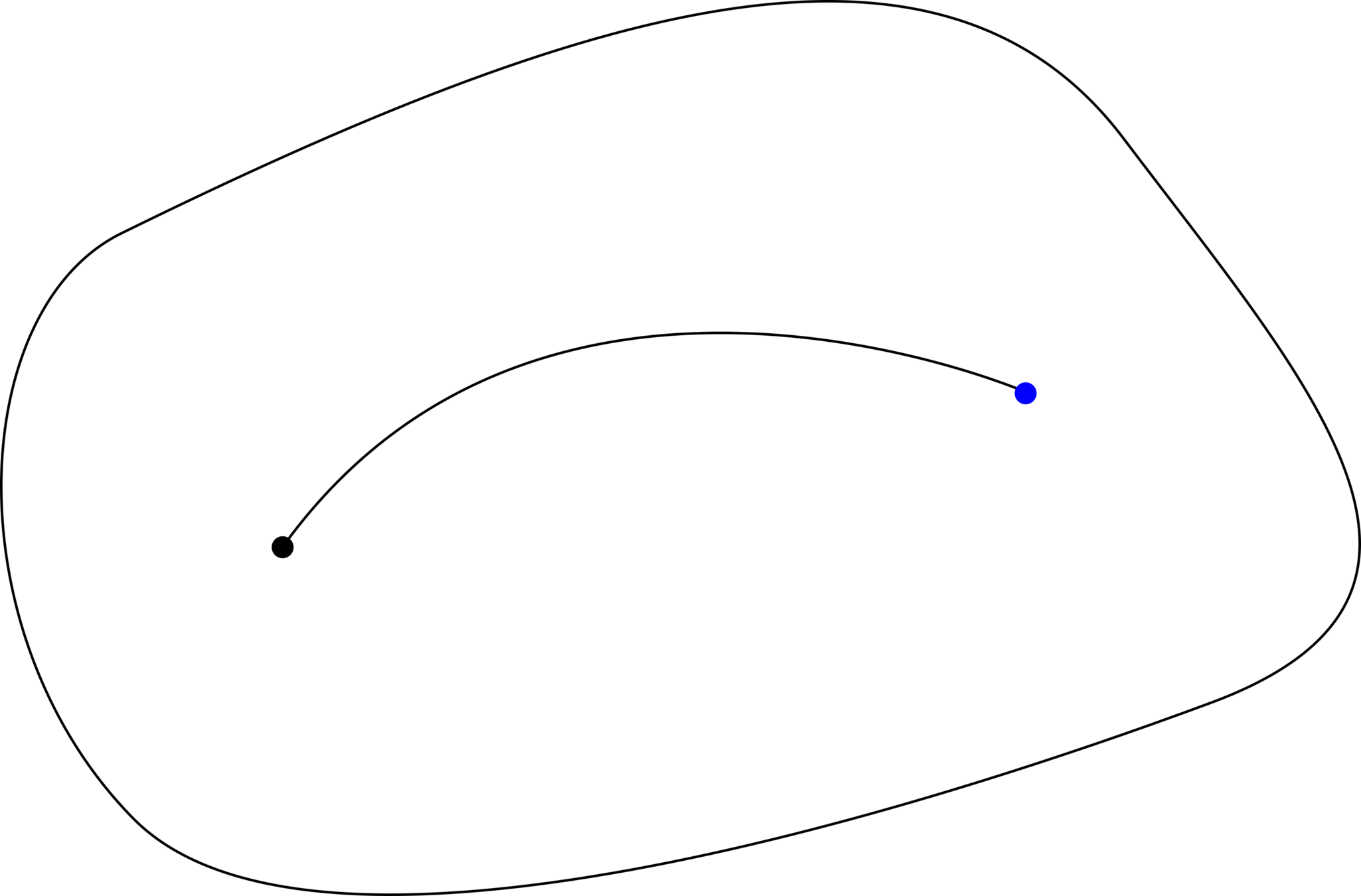
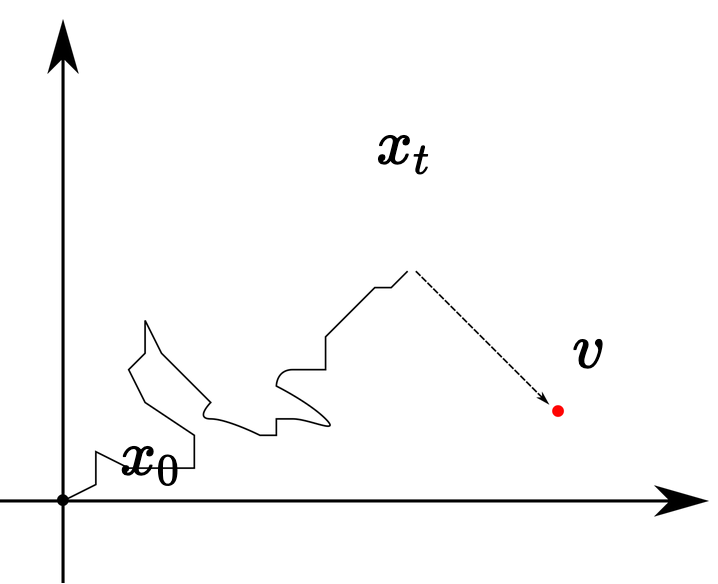
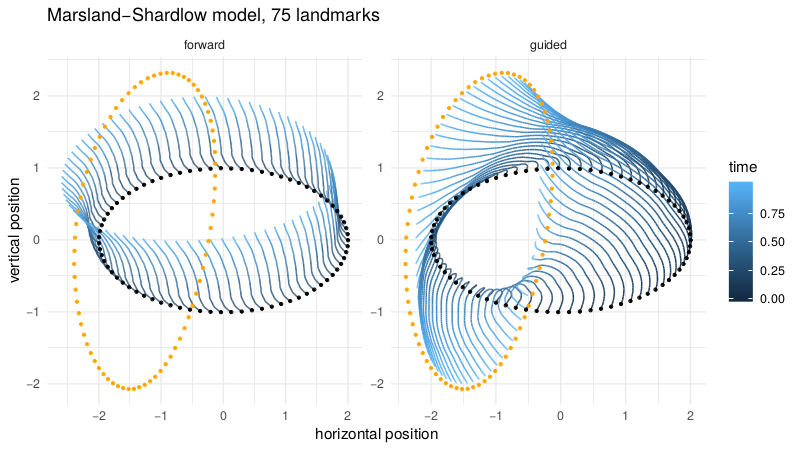
Delyon/Hu 2006:
\(\sigma\) invertible:
\(v\)
\(x_0\)
\(x_t\)
Auxilary process:
\[d\tilde{x}_t=\tilde{b}(t,\tilde{x}_t)dt+\tilde{\sigma}(t,\tilde{x}_t)dW_t\]
Approximate bridge:
\[dx_t^\circ=b(t,x_t^\circ)dt+a(t,x_t^\circ)\nabla_x\log \tilde{\rho}_t(x_t^\circ)dt\\+\sigma(t,x_t^\circ)dW_t\]
for e.g. linear processes, score \(\nabla_x\log \tilde{\rho}_t\) is known in closed from
(almost) explicitly computable likelihood ratio:
\[\frac{d\mathbb P^*}{d\mathbb P^\circ}=\frac{\tilde{\rho}_T(v)}{\rho_T(v)}\Psi(x_t^\circ)\]
Backward filtering, forward guiding: van der Meulen, Schauer et al.
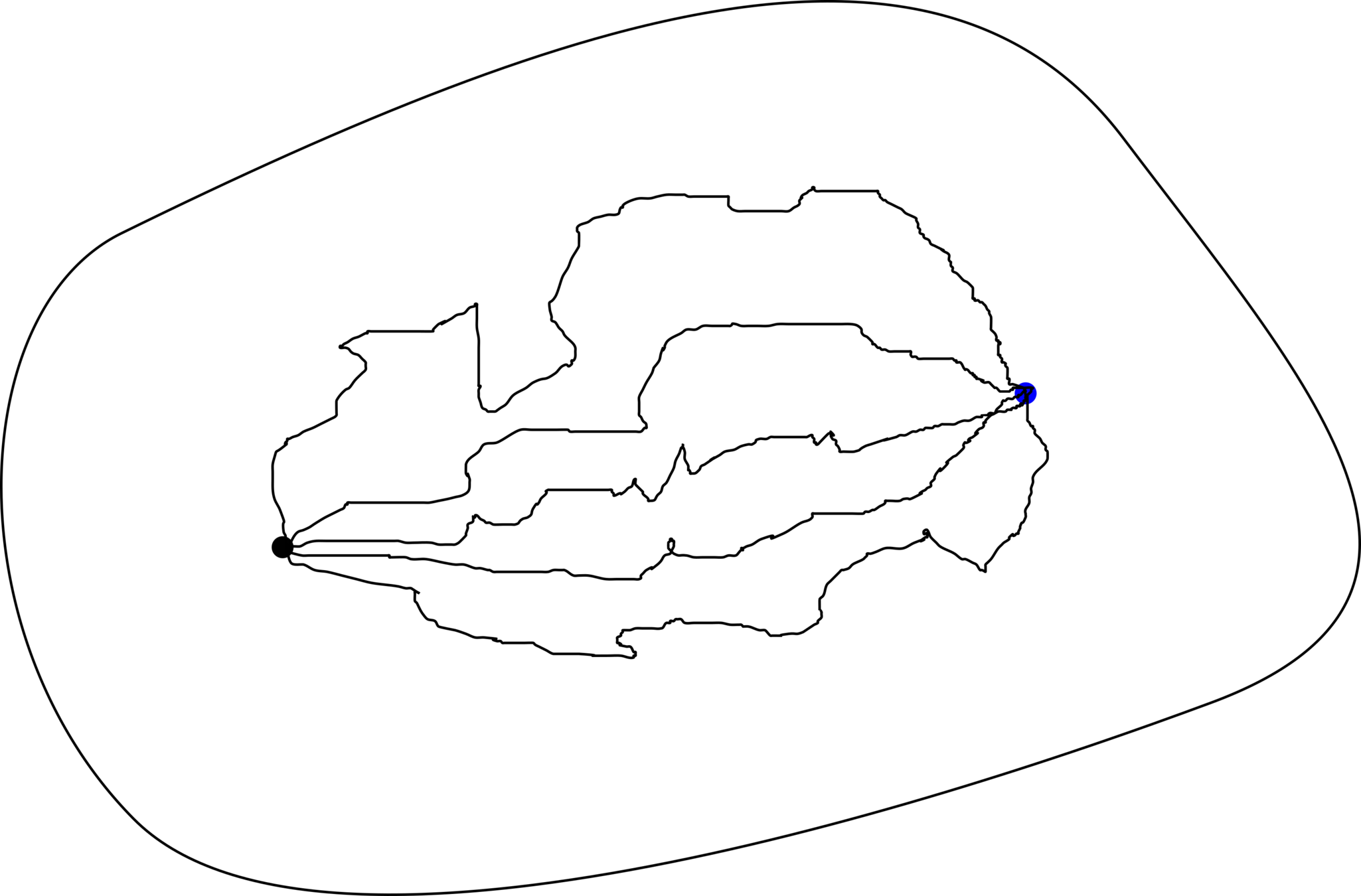
Ito stochastic process:
\[dx_t=b(t,x_t)dt+\sigma(t,x_t)dW_t\]
Bridge process:
\[dx^*_t=b(t,x^*_t)dt+a(t,x^*_t)\nabla_x\log\rho_t(x^*_t)dt\\+\sigma(t,x^*_t)dW_t\]
Score \(\nabla_x\log \rho_t\) intractable, but ...
v.d. Meulen,Schauer,Arnaudon,Sommer,SIIMS'22
Bridge:
Leaf conditioning:
\(x_0\)
\(v\)
\(x_0\)
\(h\)
\(v_1\)
van der Meulen, Schauer'20; van der Meulen'22
Stoustrup, Nielsen, van der Meulen, Sommer
\(v_2\)
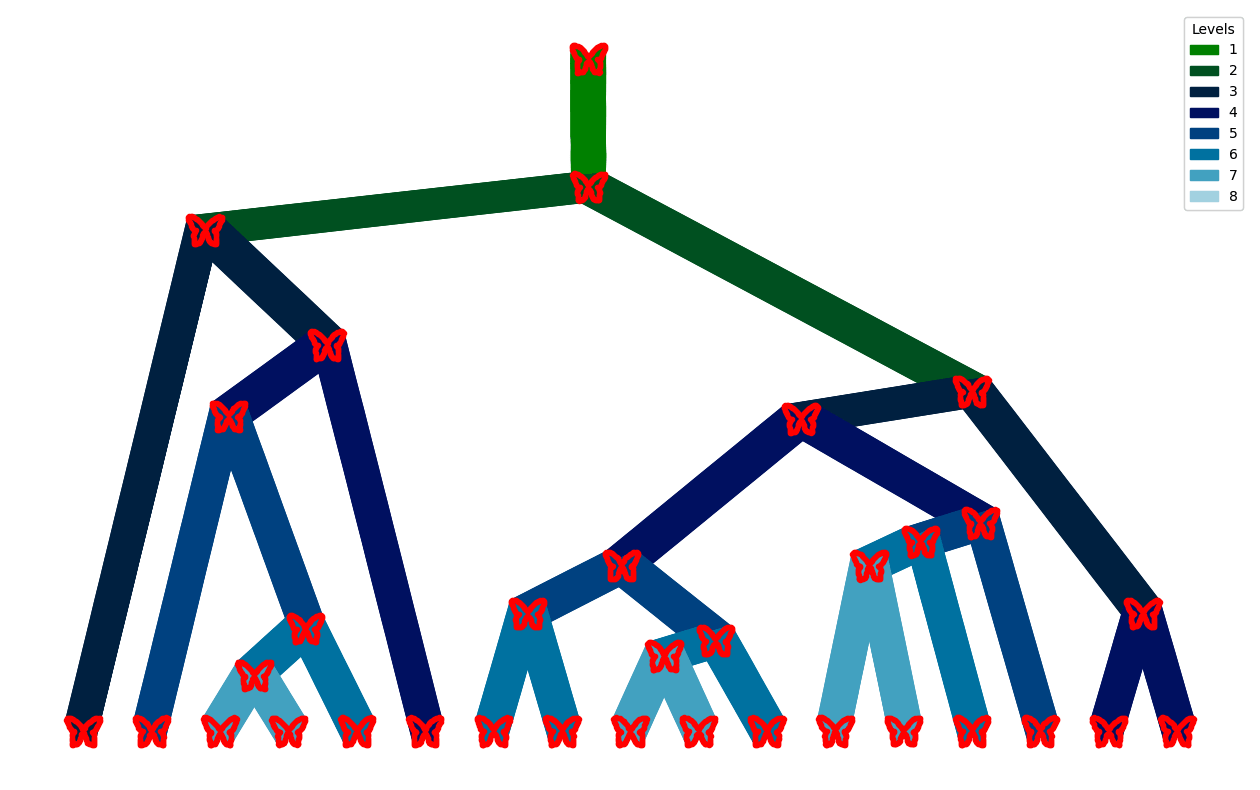
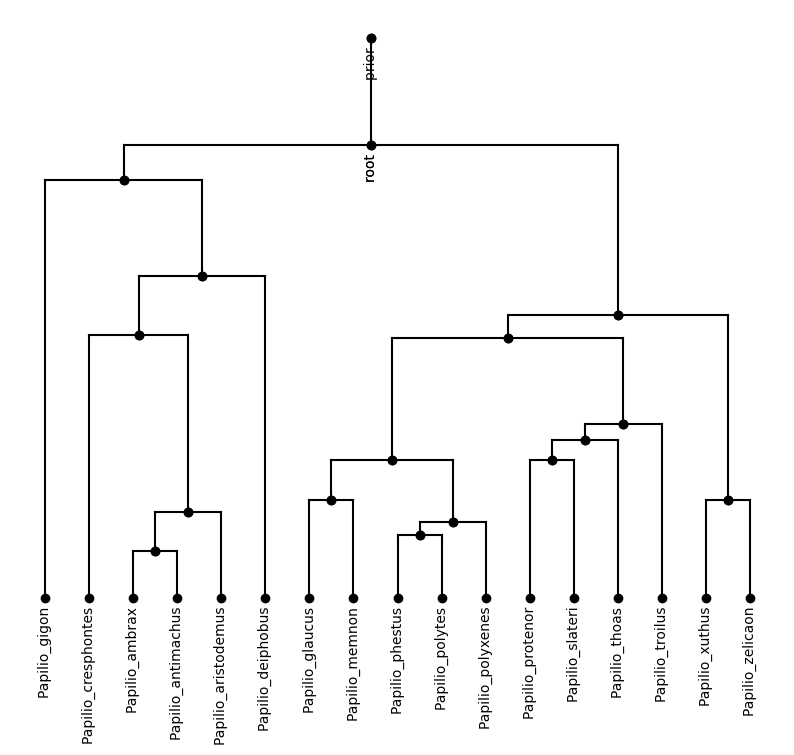
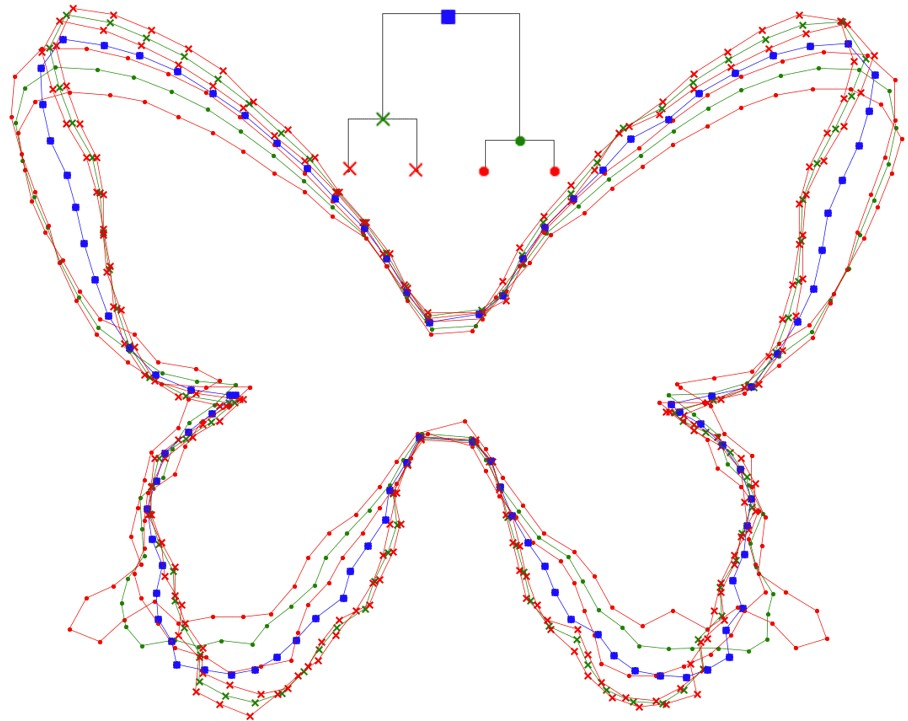
recursive,leaves to root
Backwards filter:
root to leaves
Forward guiding:
\(v\)
\(v_1\)
\(v_2\)
\(h\)
\(x_0\)
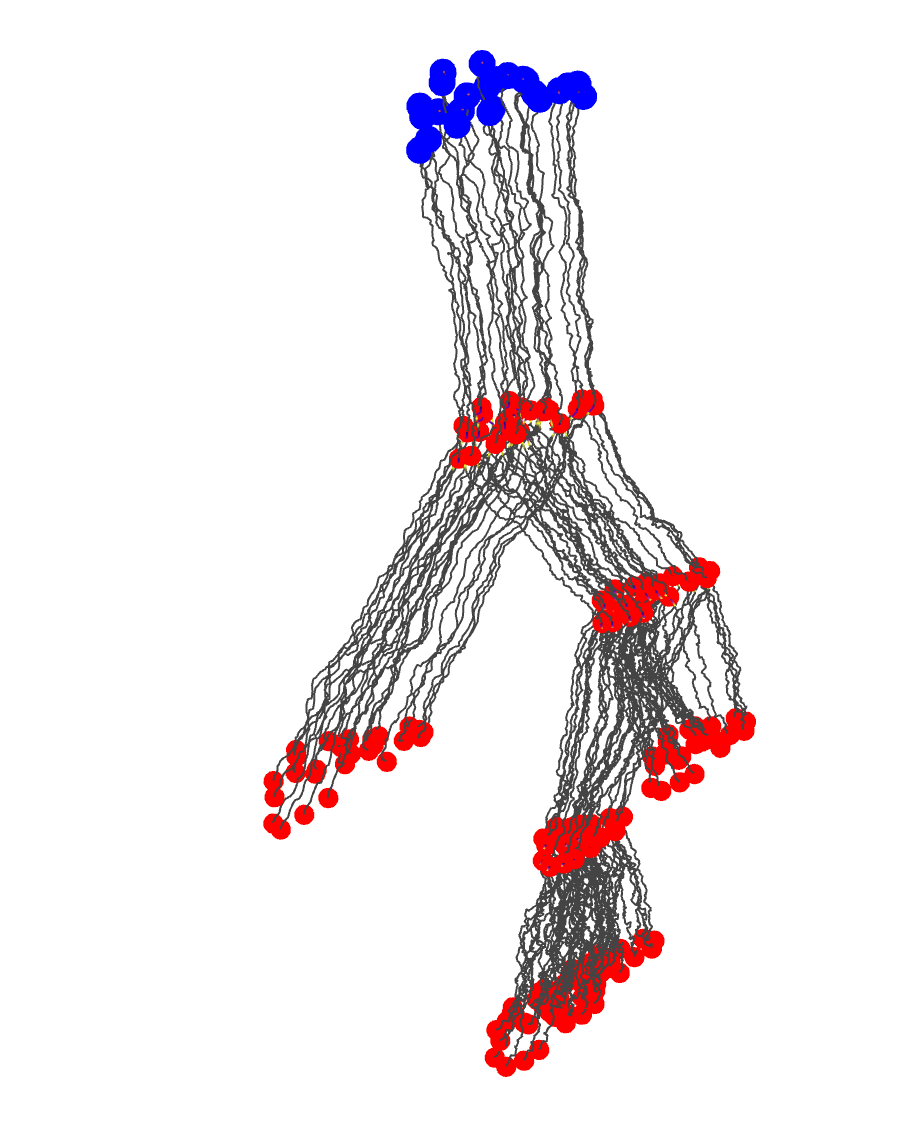
Brown. motion
Brown. motion
Brown. motion
Brown. motion
branch (independent children)
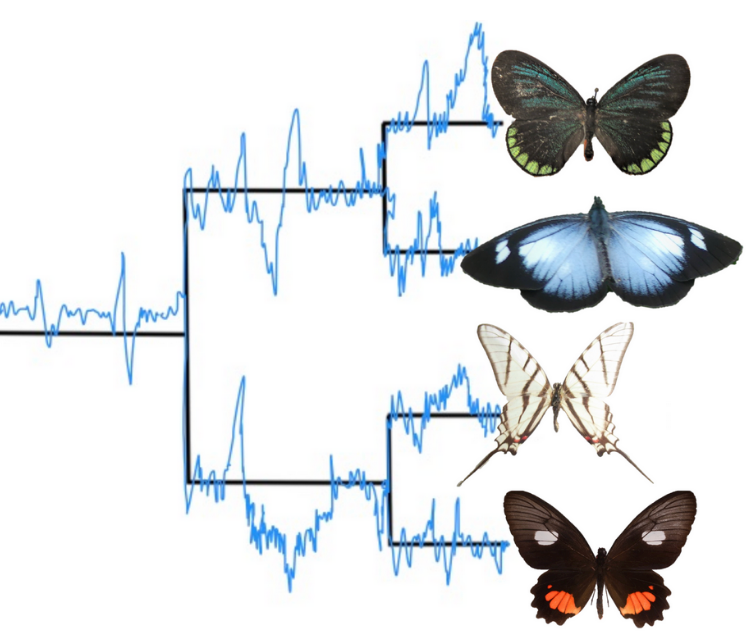
incorporate leaf observations \(x_{V_T}\) into probabilistic model:
\(p(X_t|x_{V_T})\)
Doob’s h-transform
\(h_s(x)=\prod_{t\in\mathrm{ch(s)}}h_{s\to t}(x)\)
conditioned process \(X^*_t\)
approximations \(\tilde{h}\)
guided process \(X^\circ_t\)
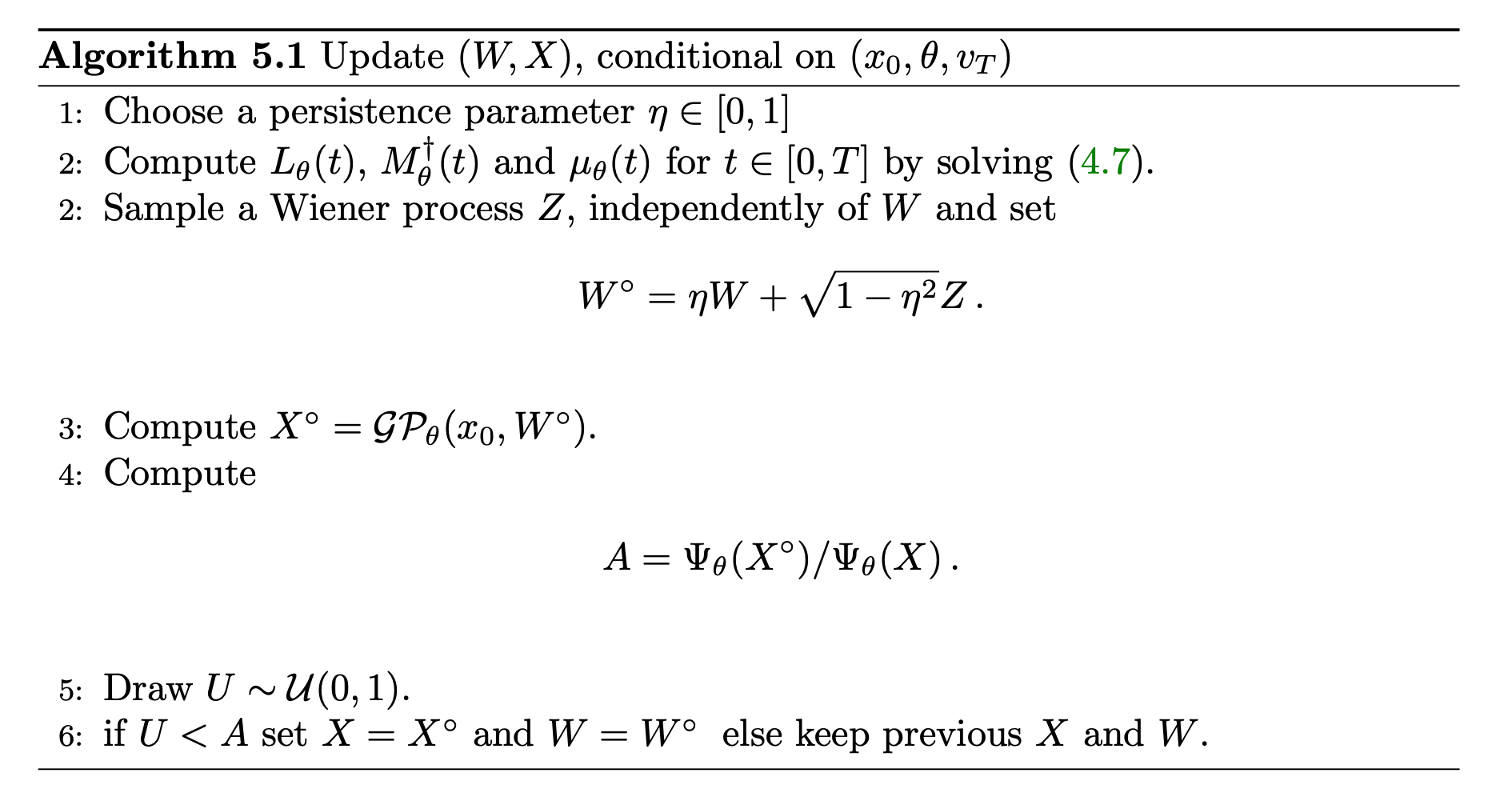
v.d. Meulen,Schauer,Sommer,'25
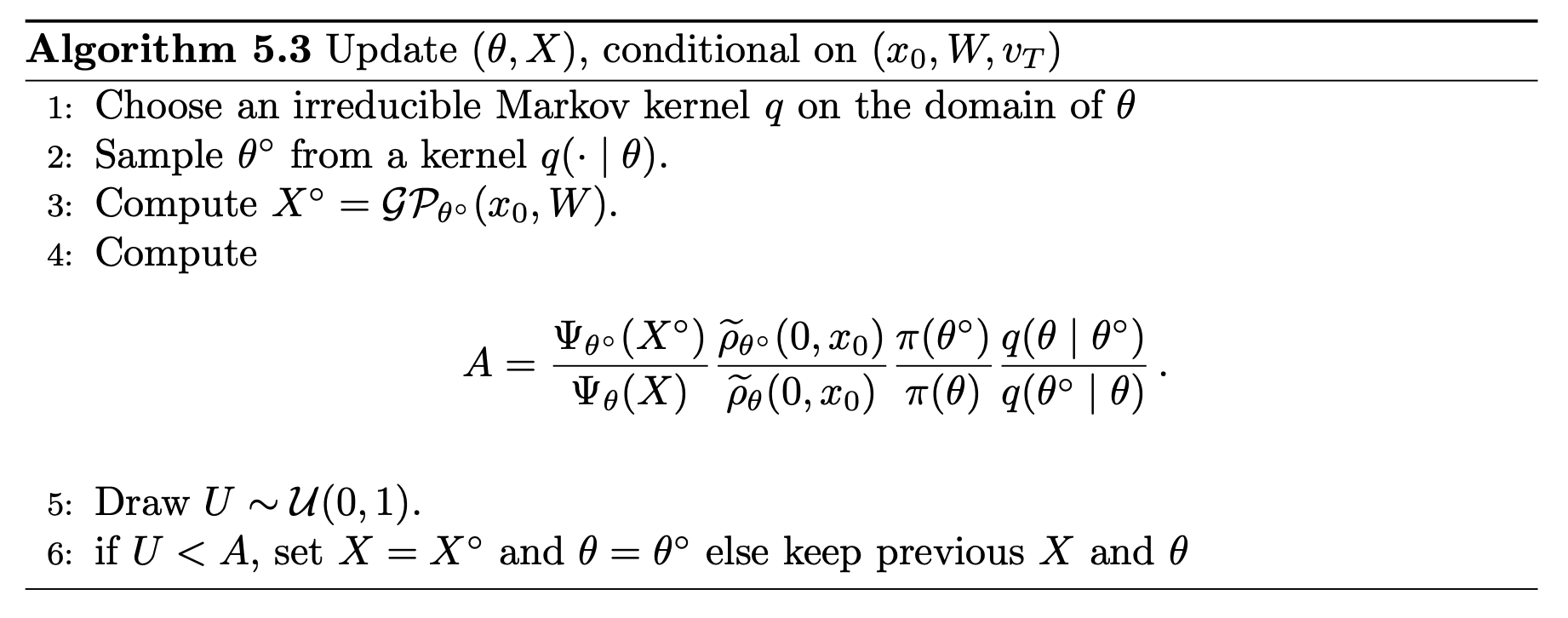
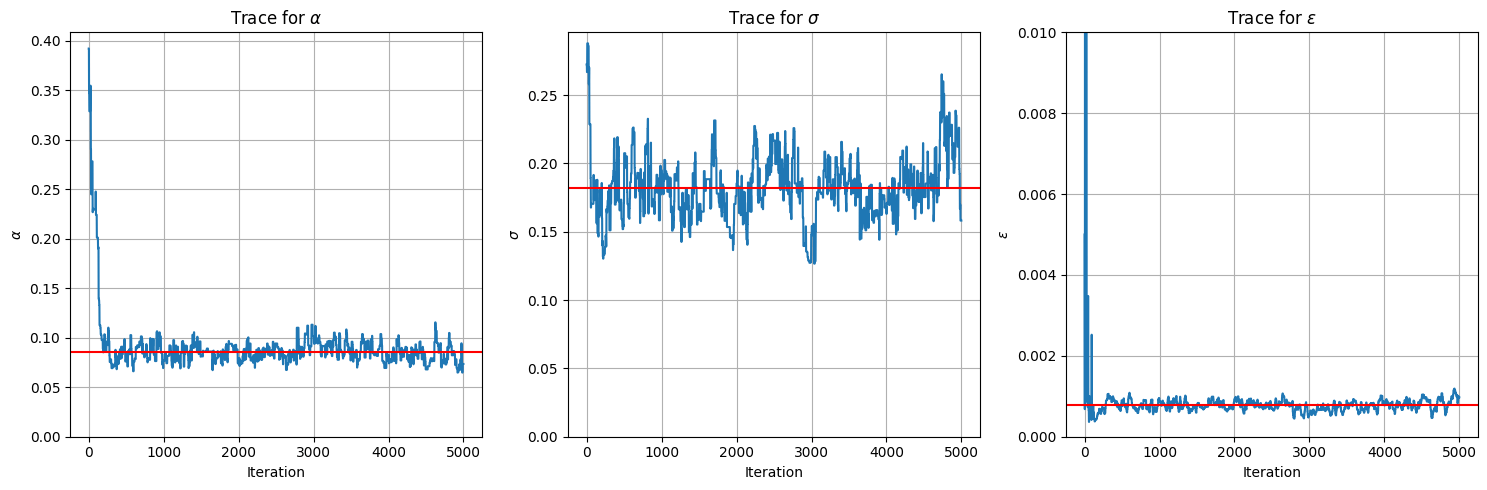
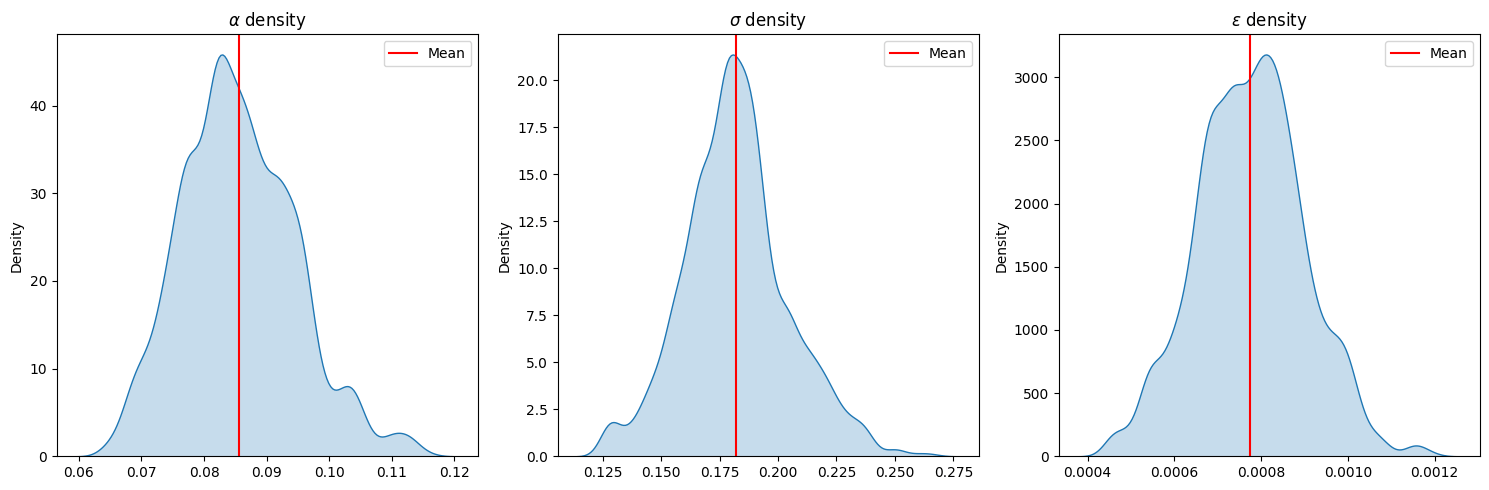
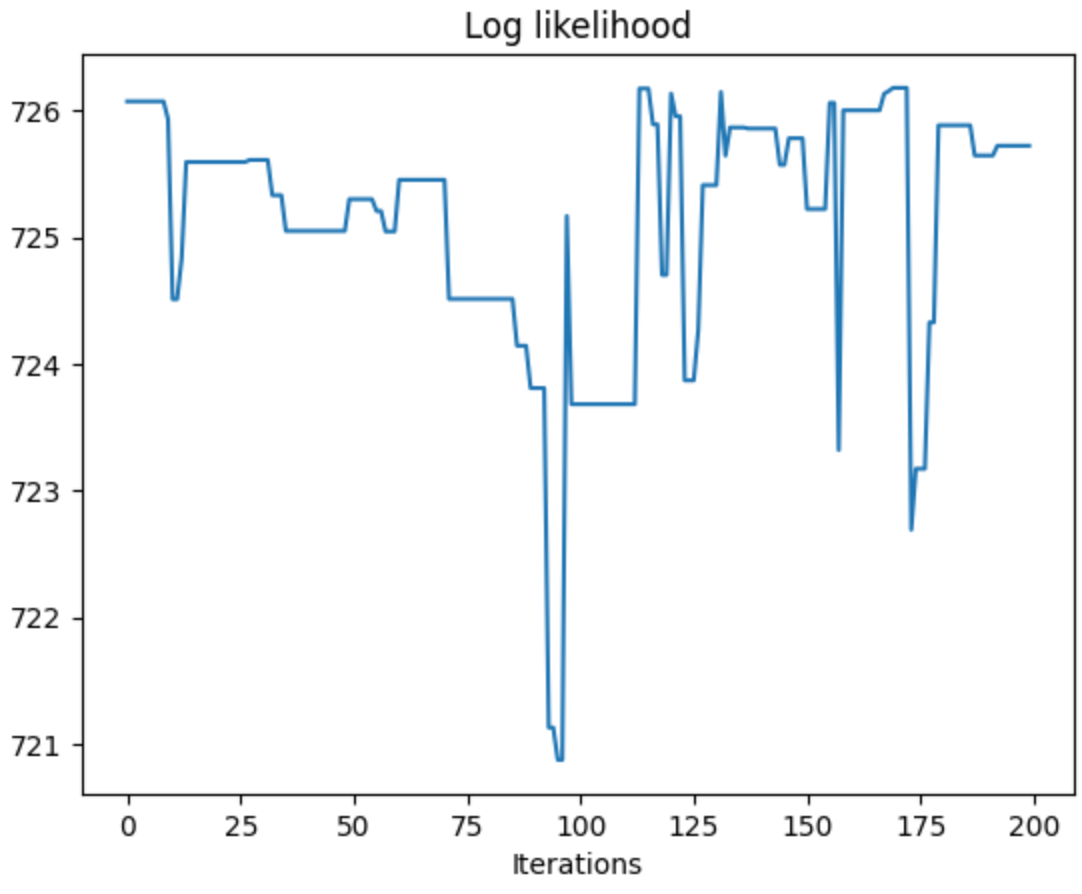
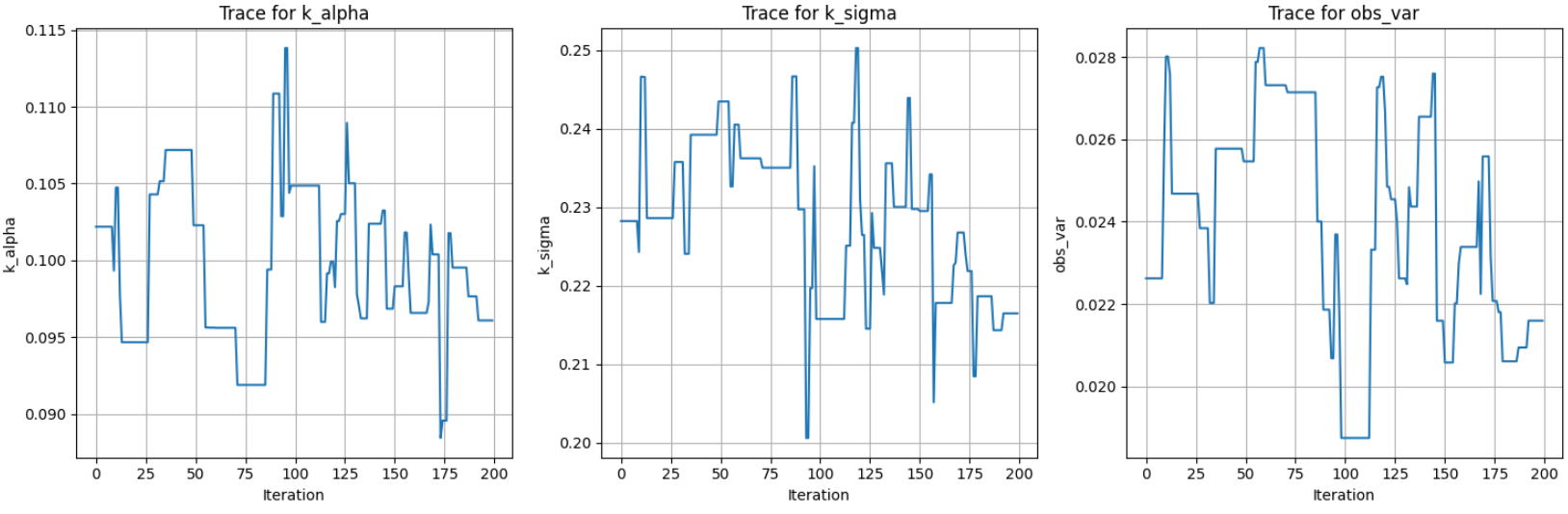
sample parameters (e.g. kernel width, amplitude)
v.d. Meulen,Schauer,Arnaudon,Sommer,SIIMS'22
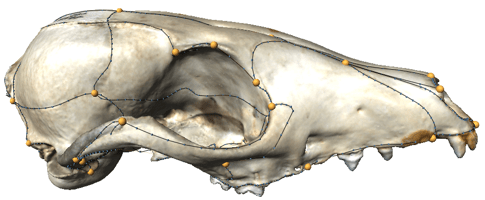
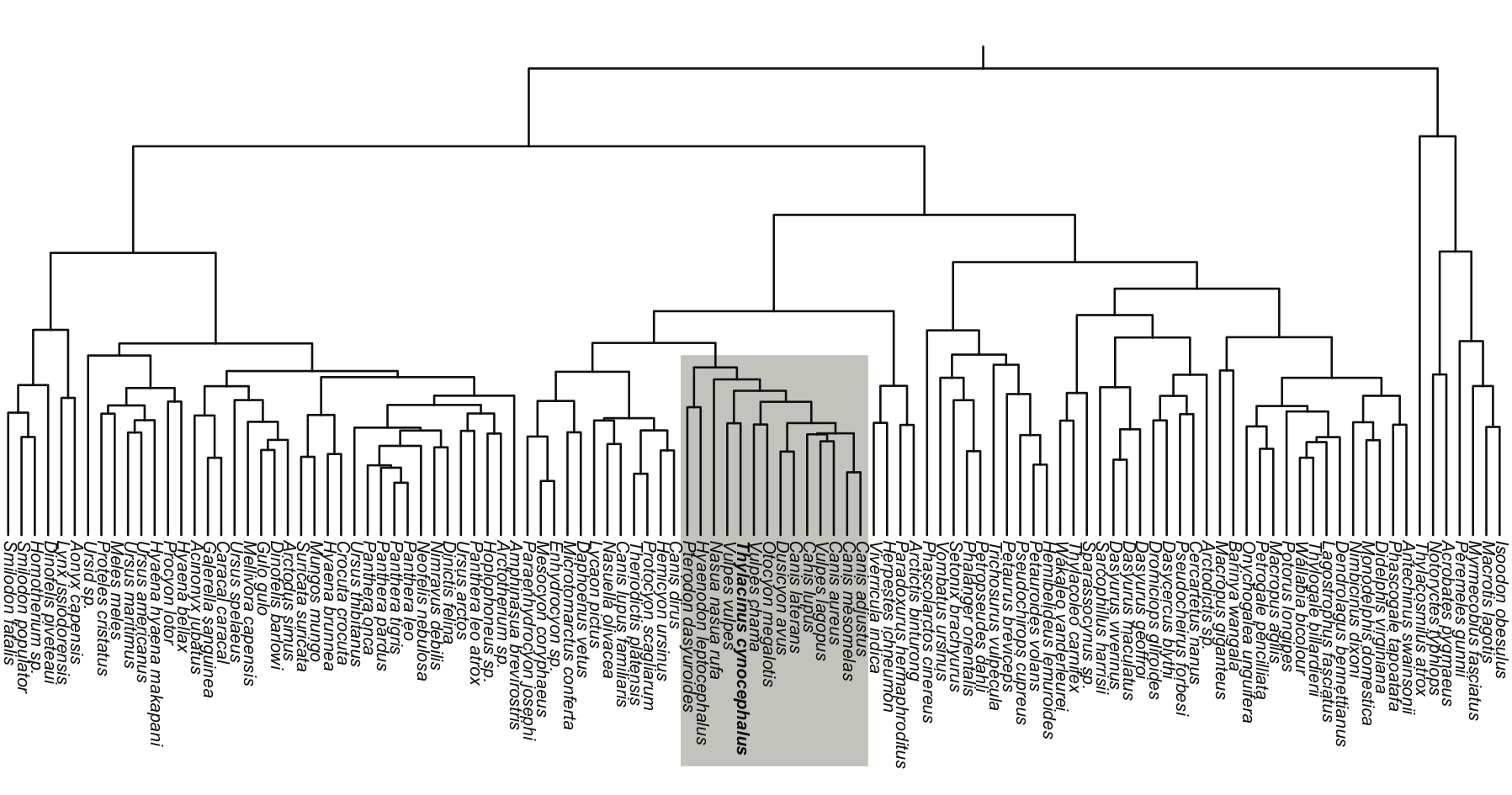
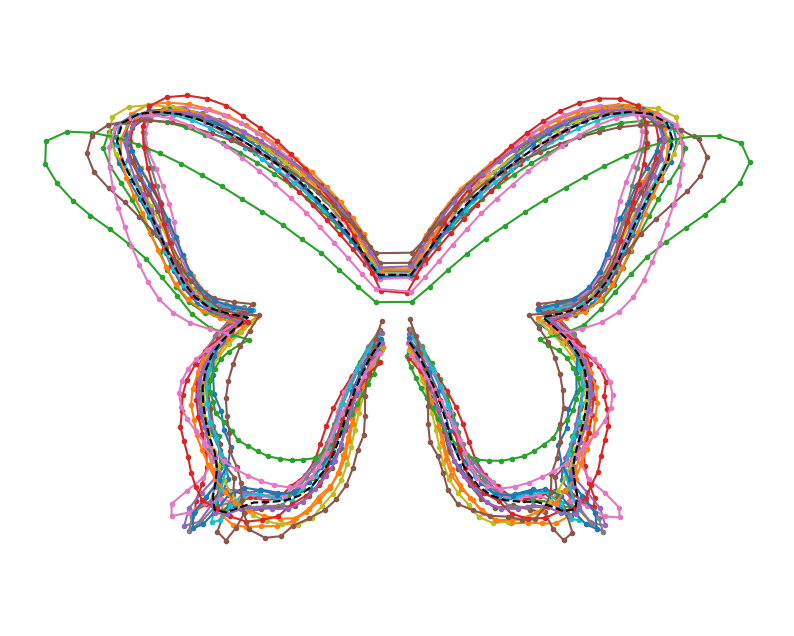
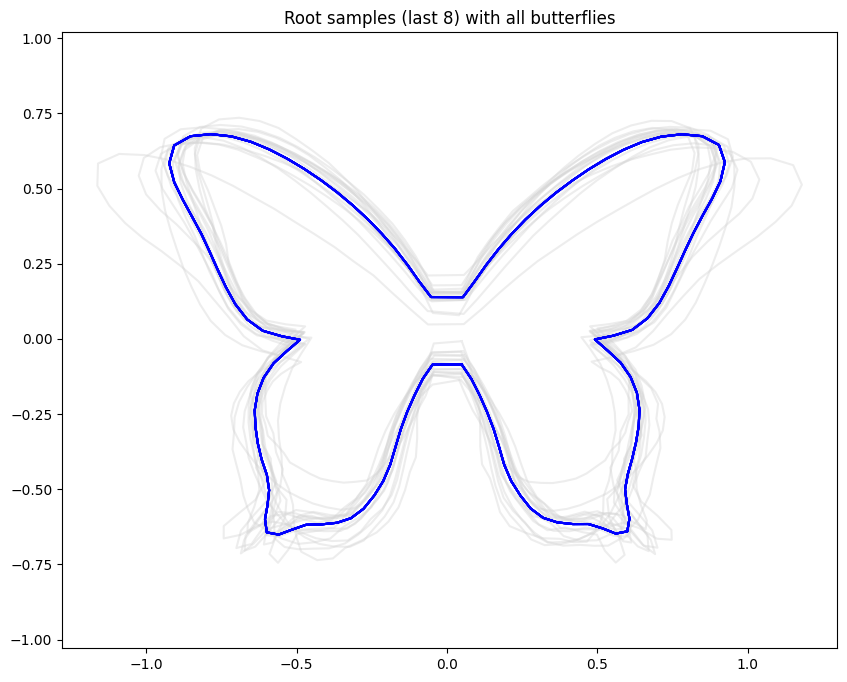
Severinsen, Hipsley, Nielsen, Sommer
Brown. motion
Brown. motion
Brown. motion
Brown. motion
1) What is a shape Brownian motion?
2) How do we condition the nonlinear process on shape observations?
3) How do we perform inference in the full model?
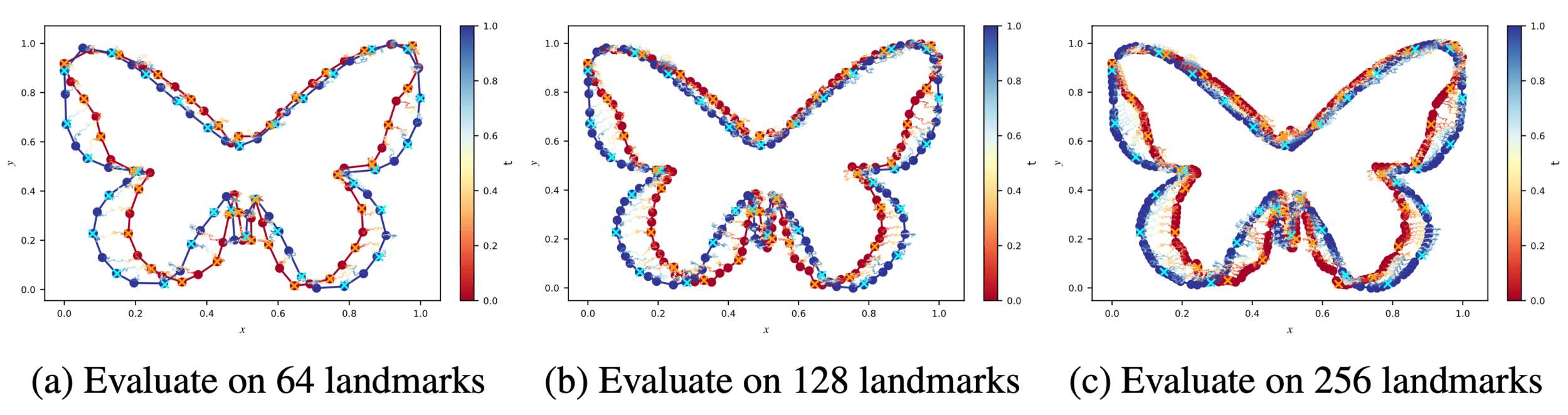
Yang,van der Meulen,Sommer,ICML'25
Severinsen, Hipsley, Nielsen, Sommer
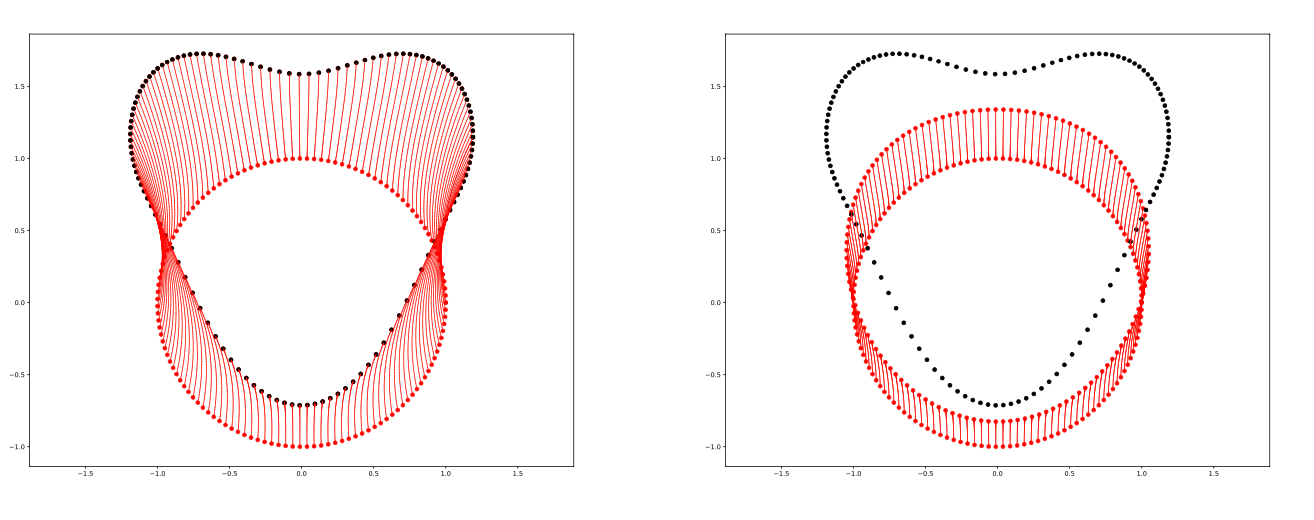
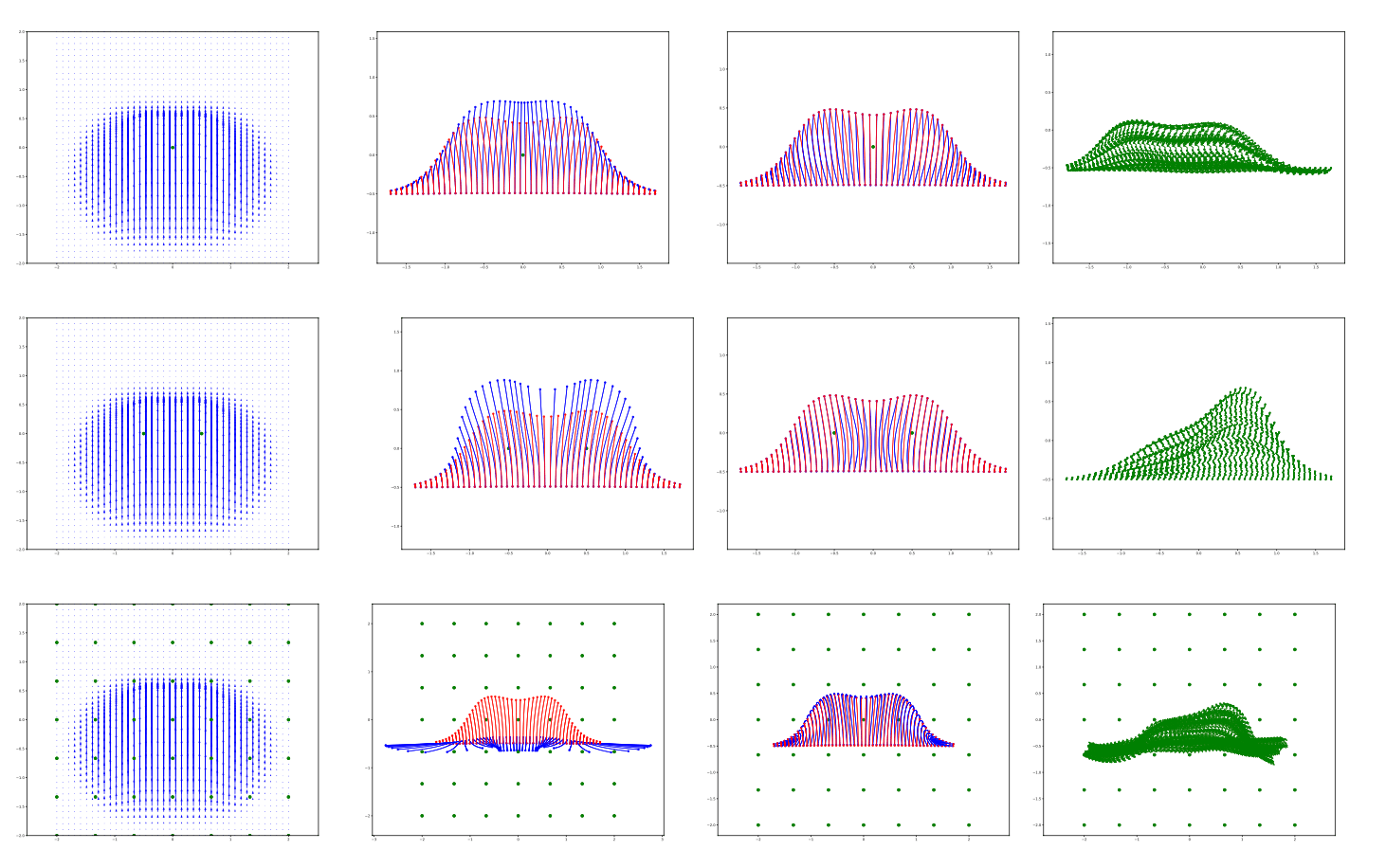
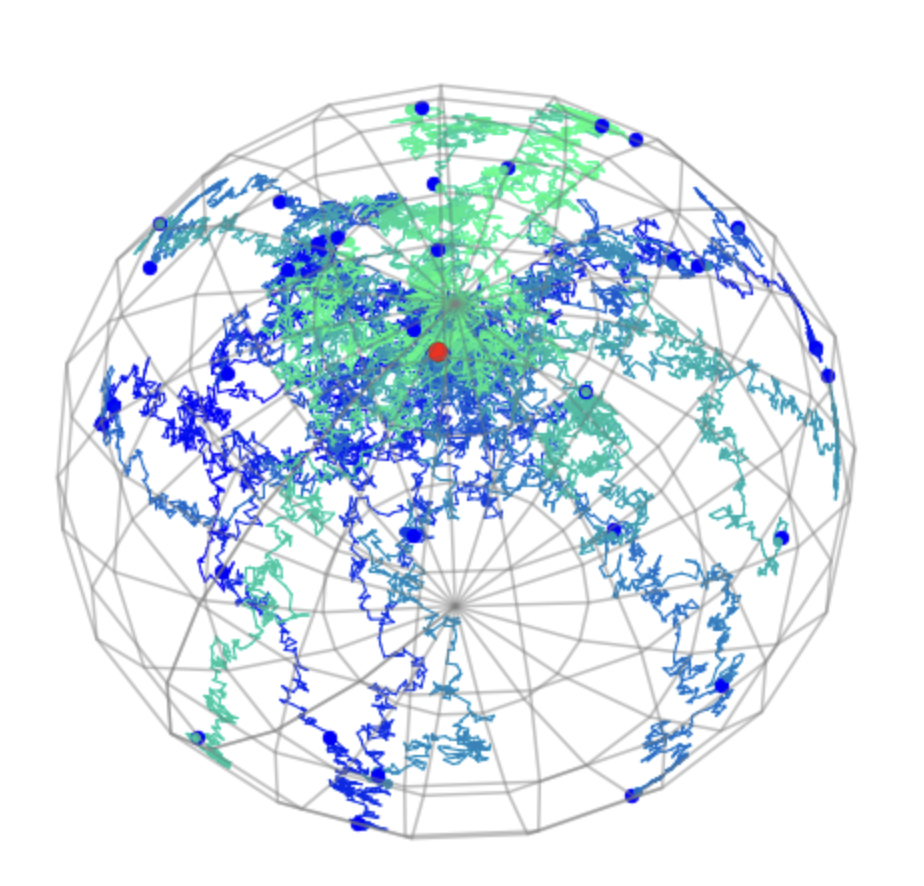
Diffusion mean
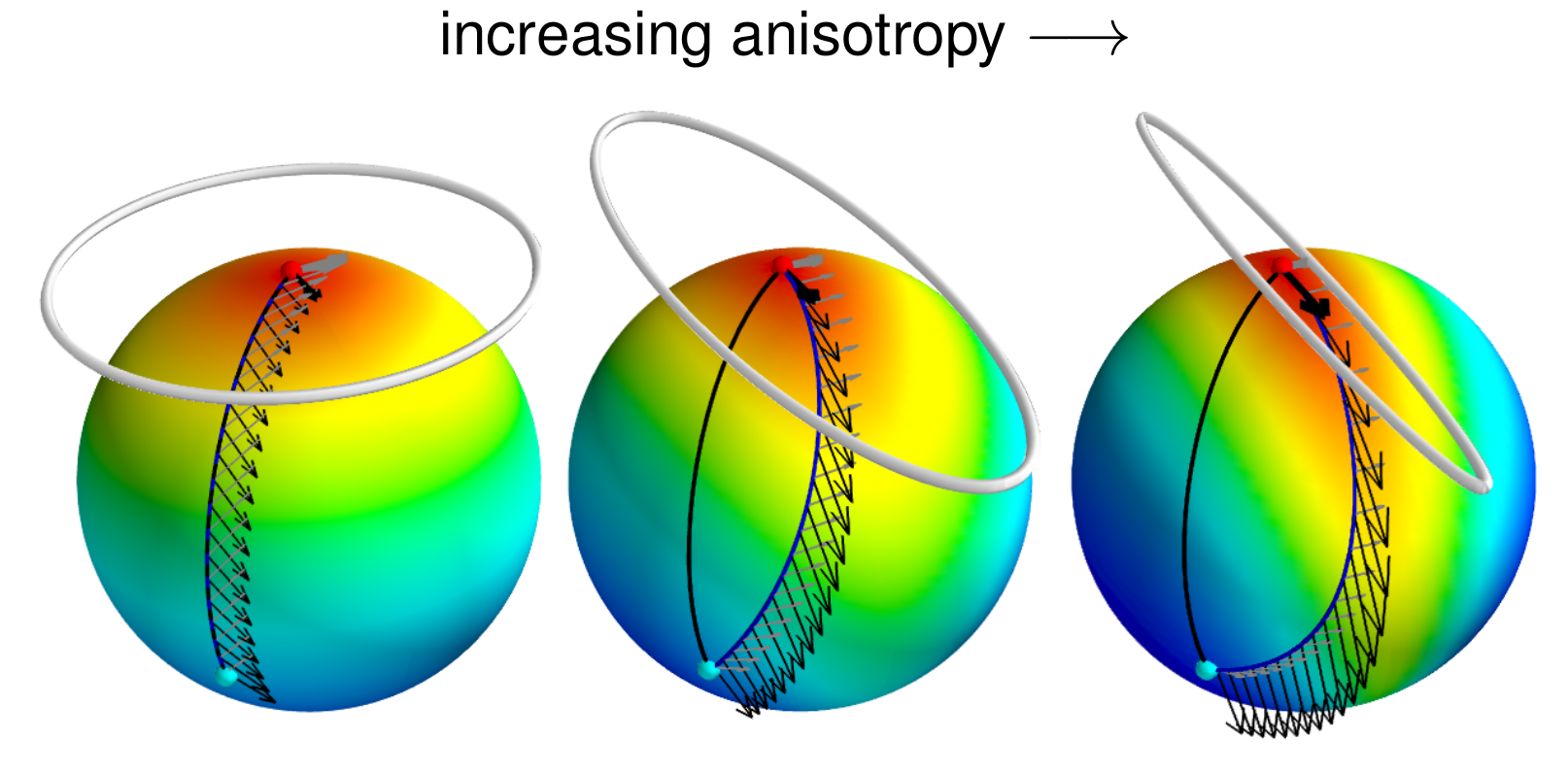
Most probable paths
Eltzner, Huckemann, Grong, Corstanje,van der Meulen,Schauer,Sommer et al.
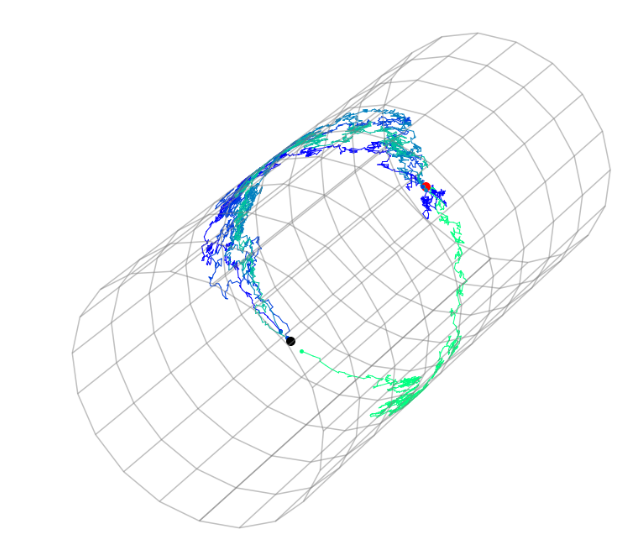
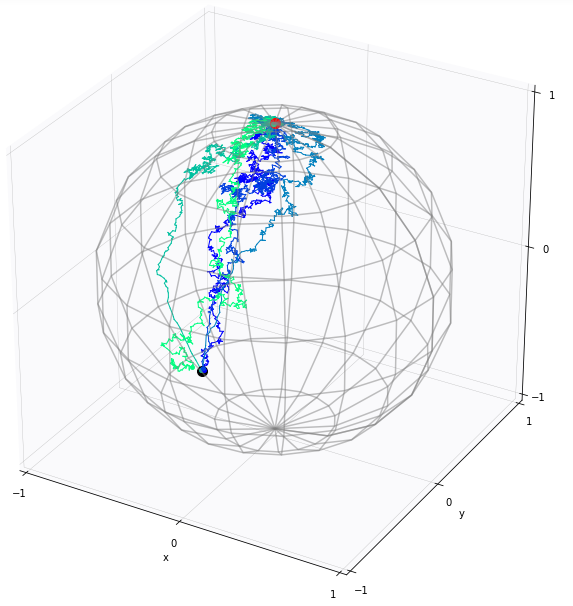
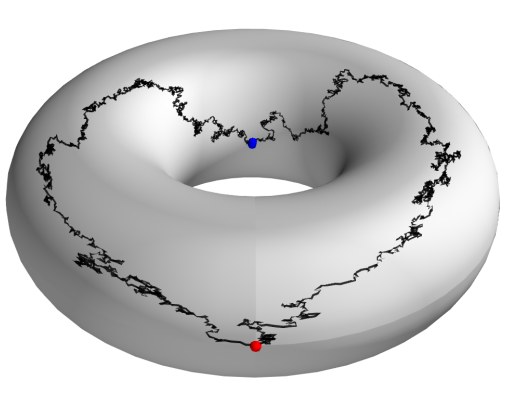
Manifold bridges
Jax magic... in milliseconds:
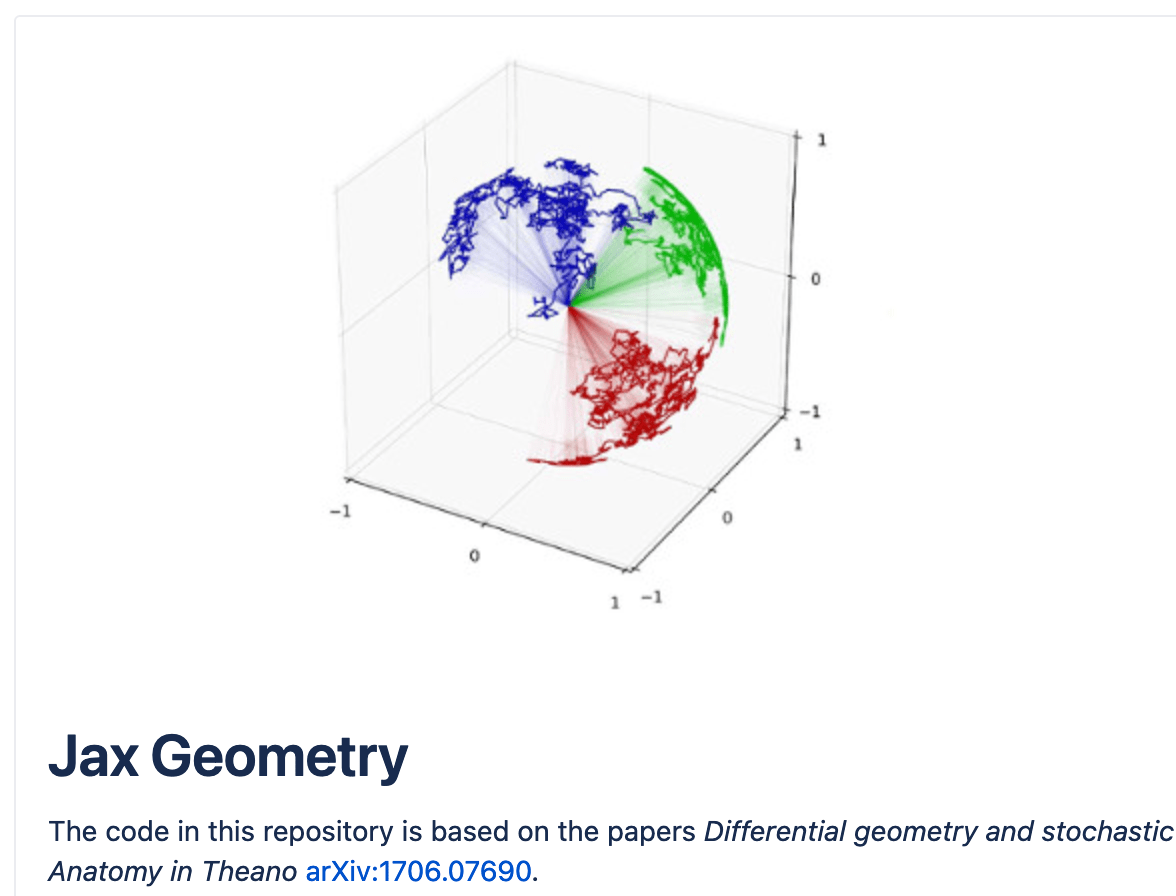
JaxGeometry: https://github.com/computationalevolutionarymorphometry/jaxgeometry CCEM: http://www.ccem.dk
Hyperiax: https://github.com/computationalevolutionarymorphometry/hyperiax slides: https://slides.com/stefansommer
References:
By Stefan Sommer




