IARN
Indoor Autonomous Robot Navigation
Hospitals and Hospice Care
Parameters
- 6 Months
- Starts in August 2020
- ~15 collaborators
“Learning Navigation Behaviors End-to-End with AutoRL,” “PRM-RL: Long-Range Robotic Navigation Tasks by Combining Reinforcement Learning and Sampling-based Planning”, and “Long-Range Indoor Navigation with PRM-RL”
Primary Functions
- Point-to-Point Long-range Navigation
- Path Following / Guided Navigation
- Collision avoidance
Technologies
ROS
- Framework for simulating complex robot behavior
- Pose Estimation, Localization, and Navigation
- Transfer learned parameters to real world
SLAM
- Simultaneous localization and mapping
- Creating a map of environment and tracking robot position
- ROS includes tools for SLAM - gmapping
SLAM
Robot Platform
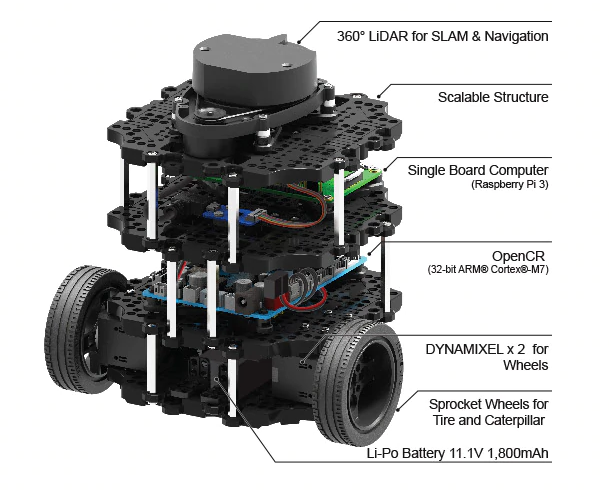
TurtleBot 3 Burger
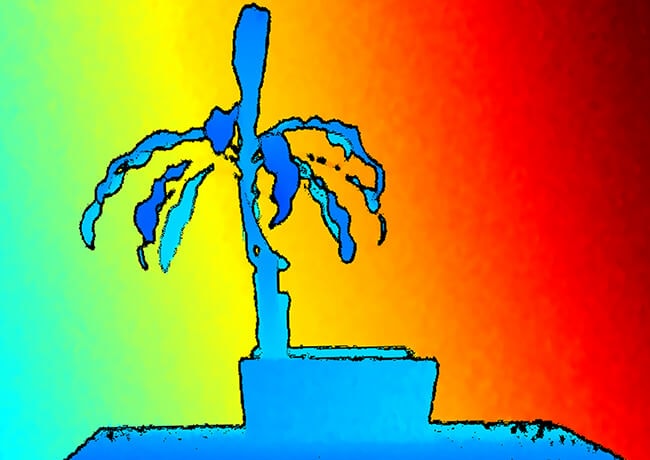
LiDAR Camera

Reinforcement Learning
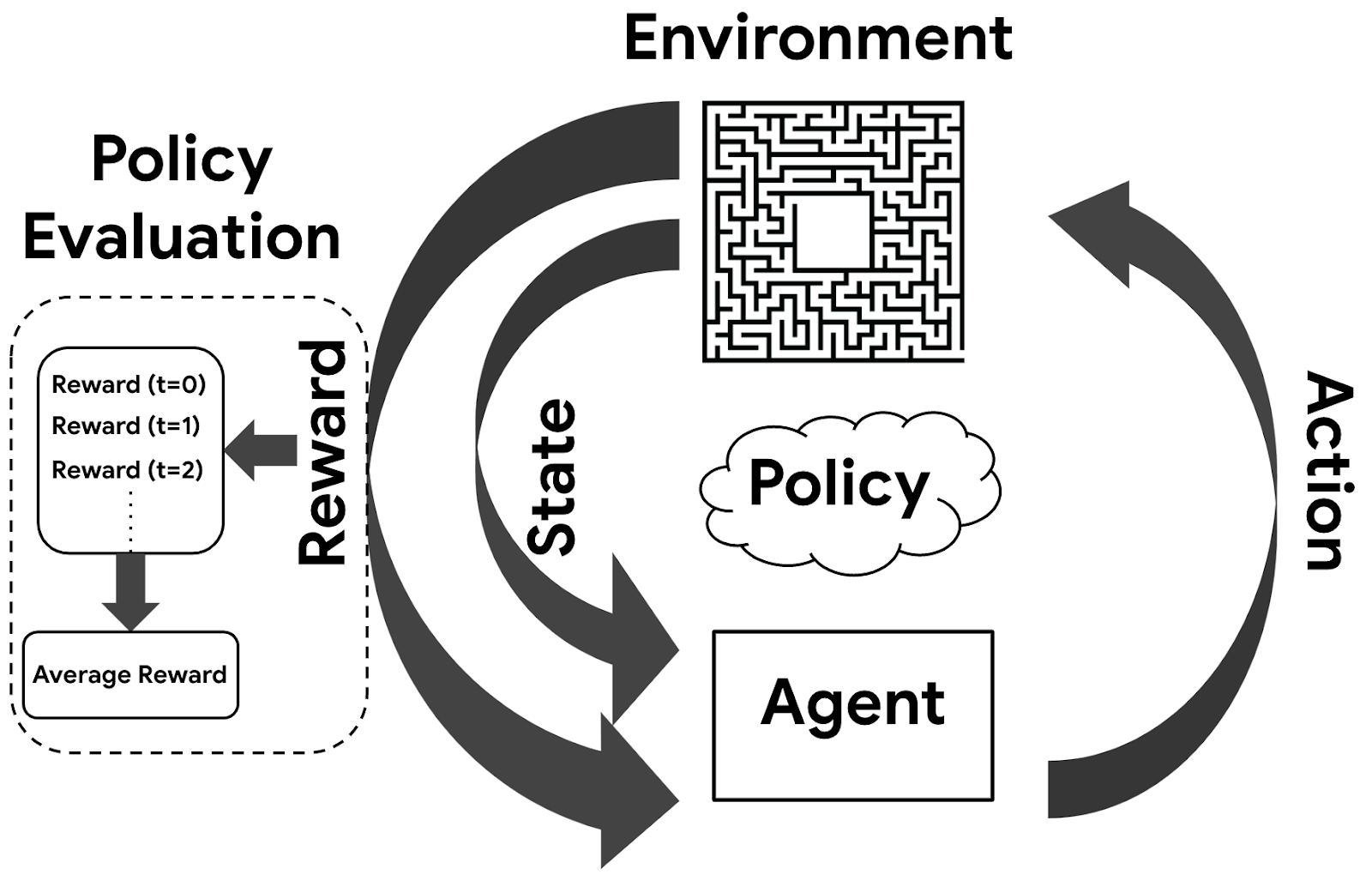
Reinforcement Learning
- State : noisy LiDAR observations
- Action : Differential Drive Wheel Speeds
- Reward : Reach goal while avoiding obstacles
Secondary Tasks
Monitoring and Debugging
- Monitor and Log state-action information
- Real-time visualization of trajectories
Web/Mobile Interface
- Track the status of the robot
- Sensors, Battery, etc,
- Control
On-board UI
- Secure Access
- Control
- Networking
- Intervention/Reset
IARN
By Suriyadeepan R




