Learning mid-level representations for computer vision
Stavros Tsogkas

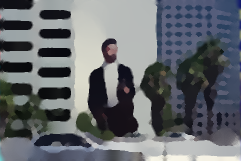
People don't just "see"

other cars
how far?
Don't run them over!!
which traffic light?
Image classification paradigm

\mathbf{f} = \begin{bmatrix} x_1 \\ x_2 \\ \vdots \\ x_D \end{bmatrix}
Model
"car"
Input
Discriminative representation
Machine learning algorithm
The deep learning revolution

ImageNet top-5 error rate (%)
Object detection 2010-2012: performance plateau
Performance: %mAP (mean average precision)
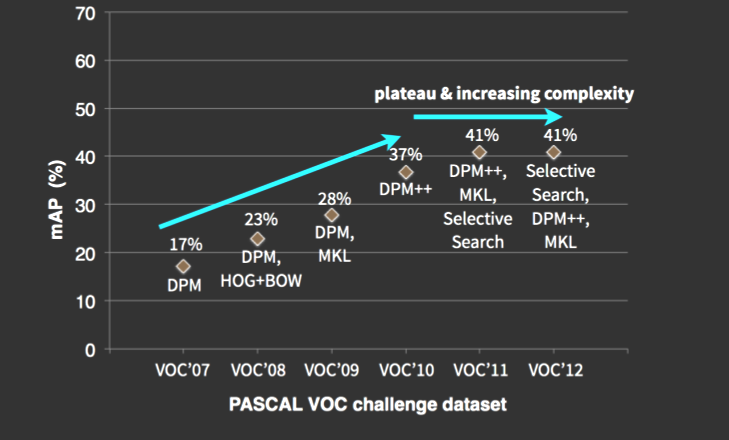
DPM variants
Object detection 2013
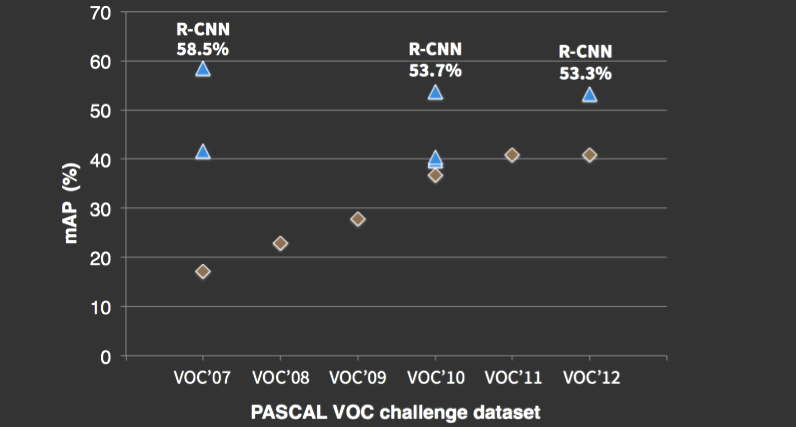
Girshick et al., Rich feature hierarchies for accurate object detection and semantic segmentation, CVPR 2014
DPM variants
Deep Learning
Brief history of learning in vision
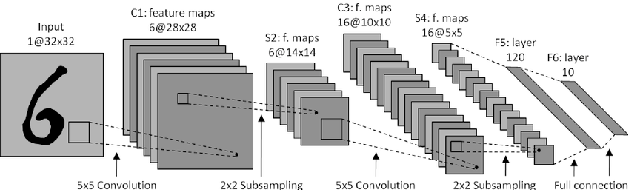
Digit recognition (CNNs, 1989)
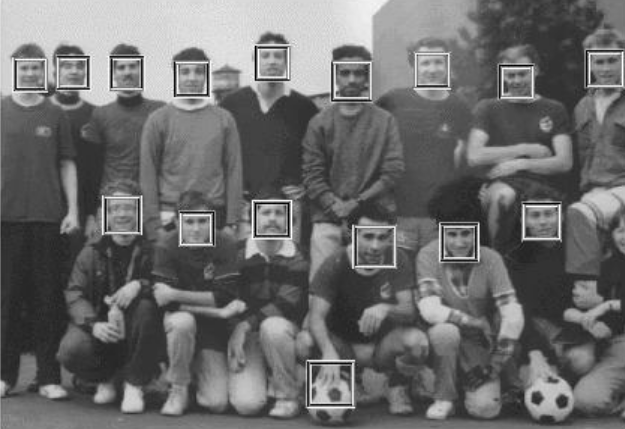
Face detection (Haar features + AdaBoost, 2001)
Object detection
(HOGs + SVMs, 2005-2010)
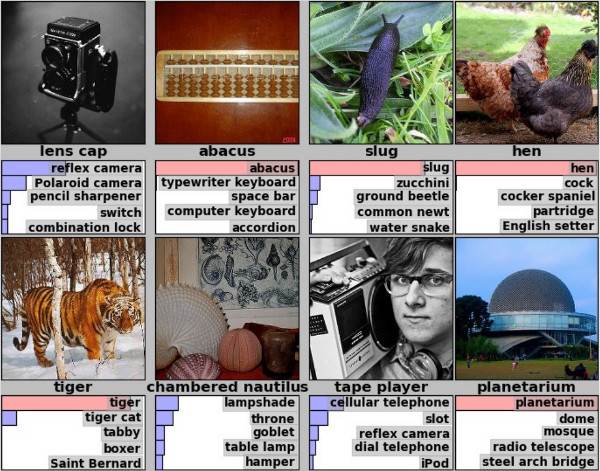
Image classification (Deep CNNs, 2012)
DL success stories
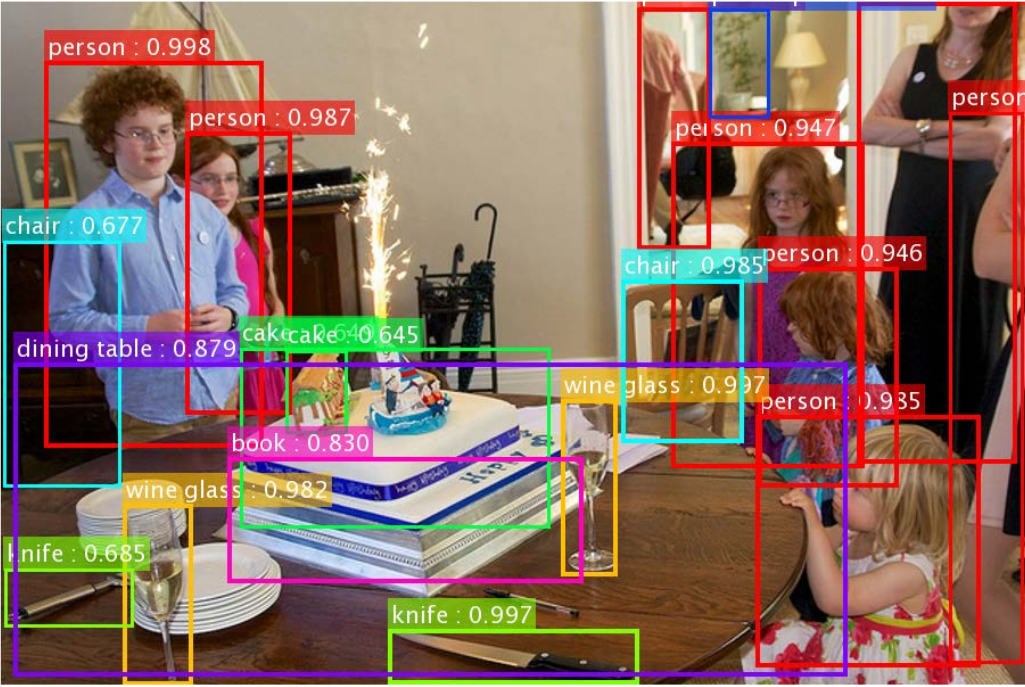
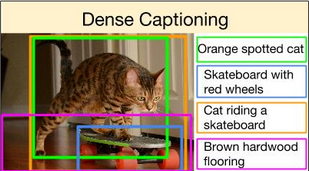
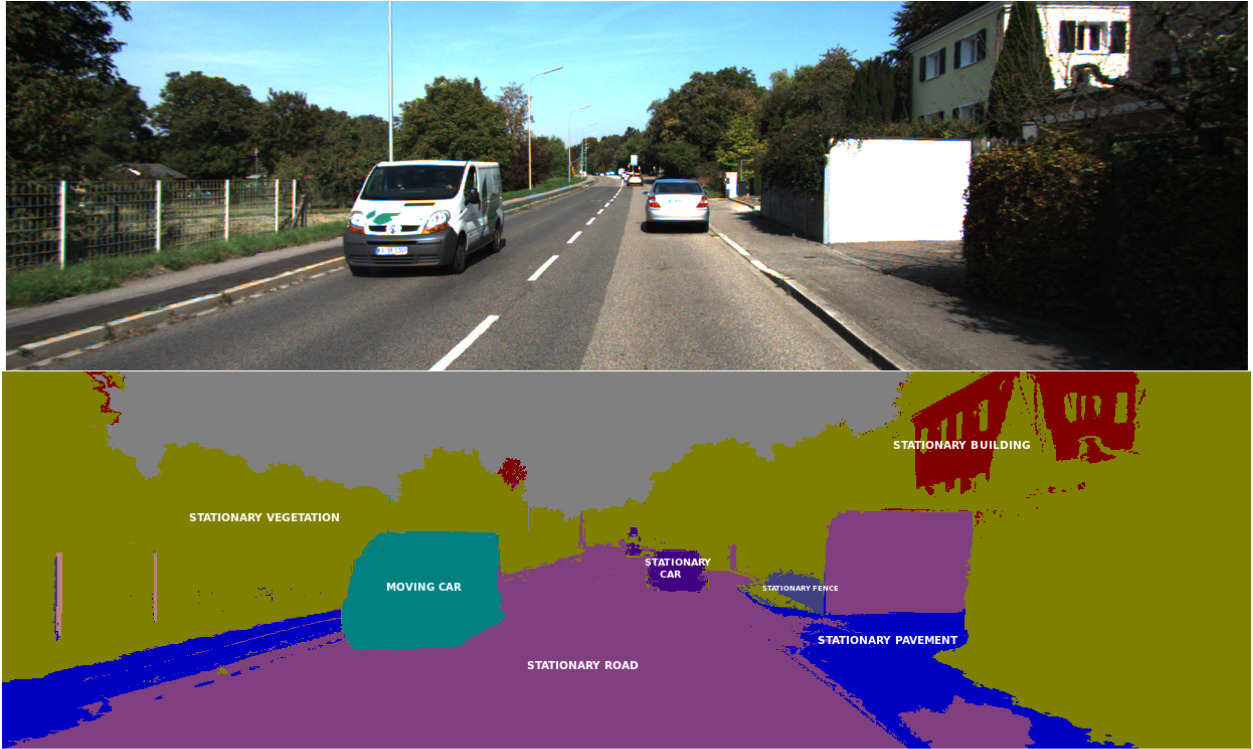
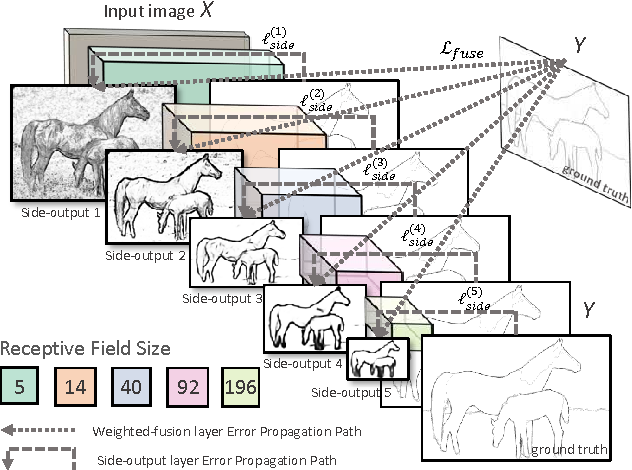
Image captioning
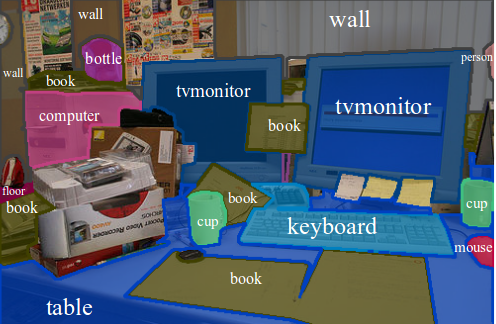
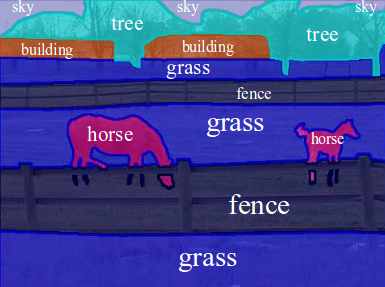
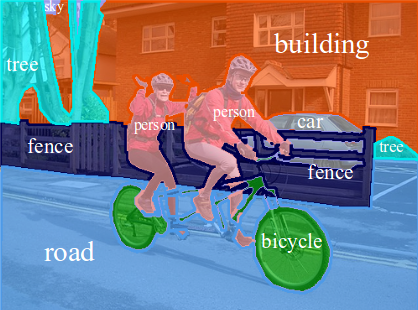
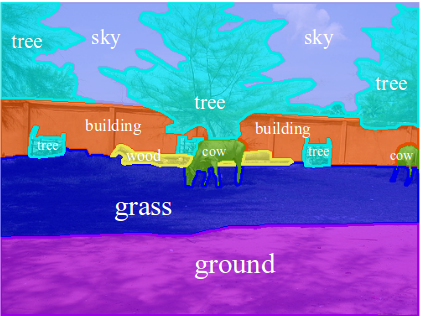
Semantic segmentation
Edge detection
Object detection
Why now?








More data
Better hardware
Support from industry
Better tools
Practical limitations
3-5 minutes per image annotation + $$$

days/weeks to train

low-powered hardware

not enough data
CNNs can be easily fooled...


+\epsilon
=
noise
"gibbon"
99.3% confidence
"panda"
57.7% confidence
...and do not generalize well

Correctly classified
Incorrectly classified
Original images
Negative images
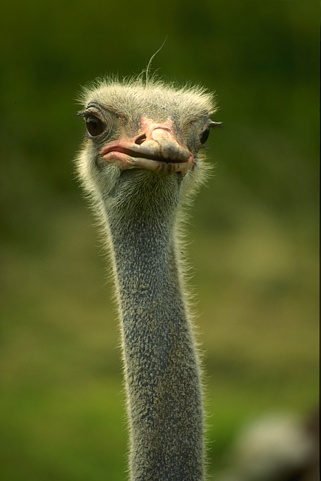
CNNs favour appearance over shape

Zebra or an elephant with stripes?
People learn general rules instead

What makes a table, a table?
flat surface
vertical support


Constellation table by Fulo
What are mid-level representations?
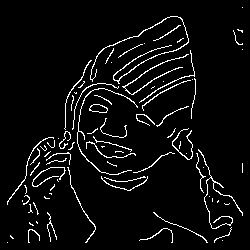
Low-level: Edges
- class agnostic
- not discriminative
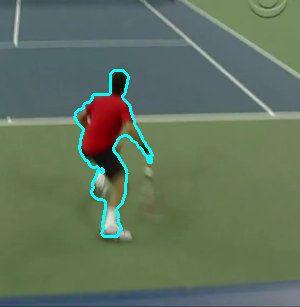
High-level: person segmentation
- class specific
- not generalizable
Mid-level:
-
discriminative and robust
-
shareable across object categories
-
simpler to model, scalable
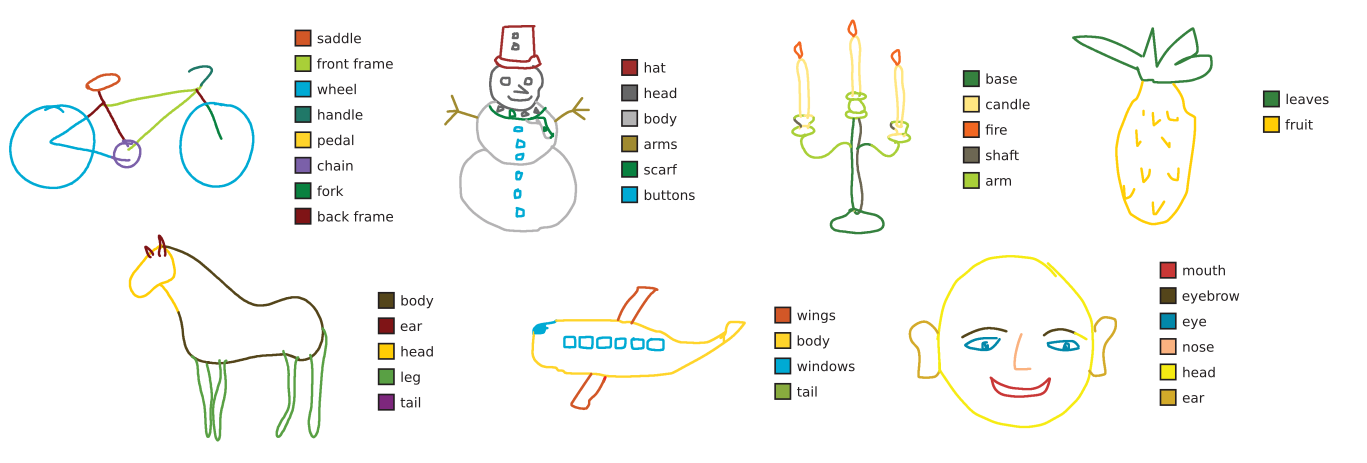
Mid-level representations include





textures
object parts
symmetries



A "vocabulary" for images



"wheel"


"sand"
-
easier to model
-
shareable

"rotational symmetry"
Unsupervised feature learning


X = ( , )
Y = 3








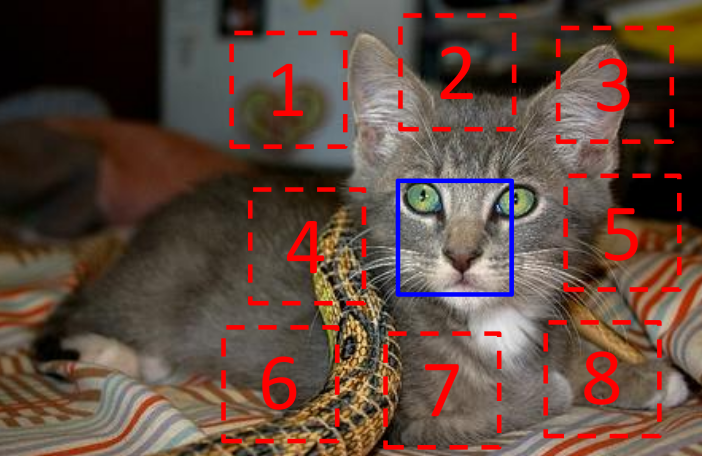
Context prediction
Doersch et al., 2015
Jigsaw puzzles
Moroozi and Favaro, 2016
1
2
3
4
8
5
9
6
7
Results comparable to supervised methods!
Outline
1. Medial axes
[ECCV 2012, ICCV 2017]
2. Object parts
3. Future research

Learning mid-level representations for shape and texture.
head
torso
arms
legs
hands
[arXiv 2016, ISBI 2016, MICCAI 2016]
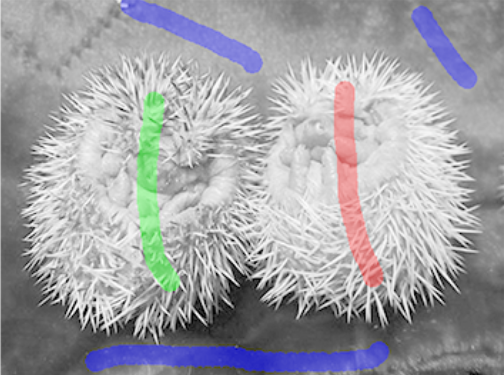
Medial axis detection
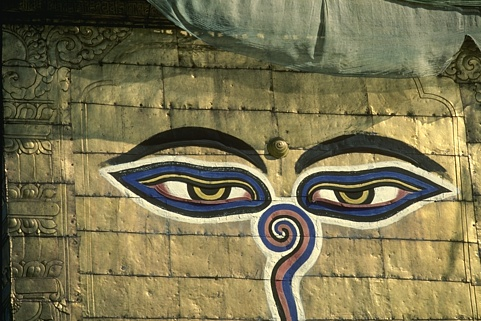
Symmetry is everywhere




Global symmetry is unstable


But local symmetry is more robust
Medial Axis Transform (MAT)
A transformation for extracting new descriptors of shape, H. Blum, Models for the perception of speech and visual form, 1967
Medial Axis Transform (MAT)
A transformation for extracting new descriptors of shape, H. Blum, Models for the perception of speech and visual form, 1967
MAT applications

Shape matching and recognition
Shape simplification
Shape deformation with volume preservation
MAT for natural images is not obvious




So let's learn it from data!


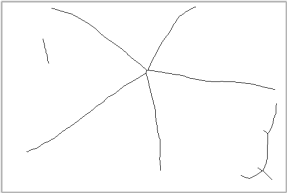
Image from BSDS300
Ground-truth segmentation
Ground-truth skeleton
Medial point detection: binary classification problem
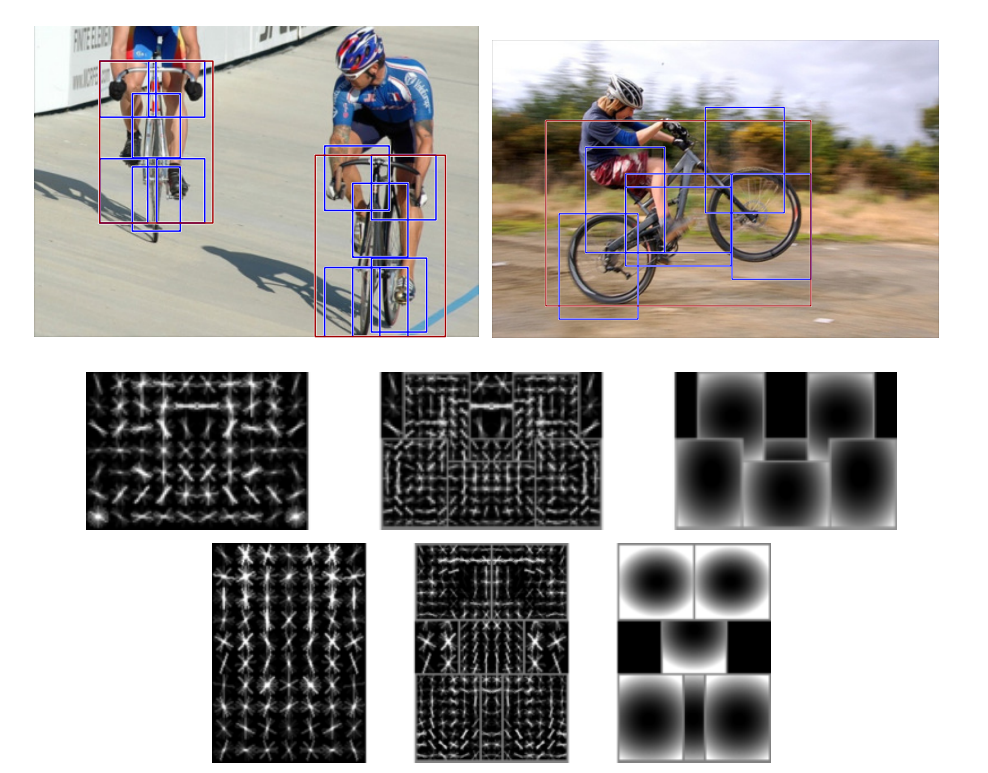
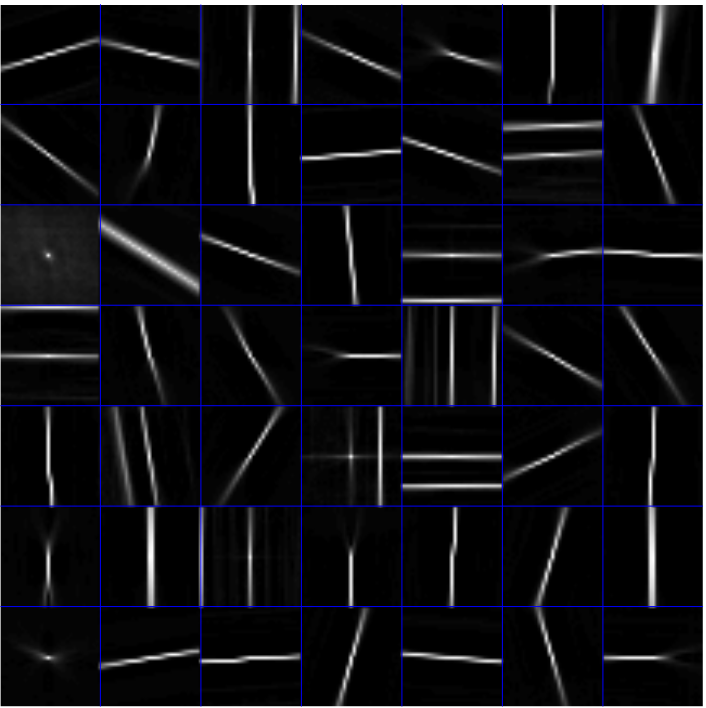
Features designed for bilateral symmetry of image regions
\theta
s
Scale
Orientation
Compute colour and texture histograms for "inside"
1
2
3
h_1
h_2
\(\chi^2\)( , )
h_3
\gg 0
High chance of symmetry!
\(\chi^2\)( , ) \(\sim\) \(\chi^2\)( , ) \(\approx 0\)?
h_4
h_5
5
4
6
h_4
h_6
Low chance of symmetry!
High histogram distance?
and "outside"
...for both pairs?
\mathbf{f_{\mathbf{x}}}(s_i,\theta_j) = [\chi^2_{12}, \chi^2_{13},\chi^2_{23}\ldots]
Train with multiple instance learning
Symmetry probability:
p_{\mathbf{x}}(s_i,\theta_j) = \frac{1}{1+e^{-\mathbf{w}^T\mathbf{f_x}(s_i,\theta_i)}}
Goal: learn w
Challenge: no ground truth annotation for scale and orientation
\mathbf{f_x}(s_1,\theta_1)
\mathbf{f_x}(s_2,\theta_1)
\mathbf{f_x}(s_3,\theta_1)
\mathbf{f_x}(s_4,\theta_1)
The bag is positive if at least one instance is positive
\mathbf{f_y}(s_1,\theta_2)
\mathbf{f_y}(s_2,\theta_2)
\mathbf{f_y}(s_3,\theta_2)
\mathbf{f_y}(s_4,\theta_2)
\mathbf{x}
\mathbf{y}
The bag is negative if all instances are negative
P_{\mathbf{x}} = 1-\prod_i \prod_j (1-p_{\mathbf{x}}(s_i,\theta_j)) \sim \max_i \max_j p_{\mathbf{x}}(s_i, \theta_j)
Noisy-OR = differentiable "max"
Dense feature extraction

Multiple scales
Multiple orientations
\theta_1
\theta_2
\theta_3
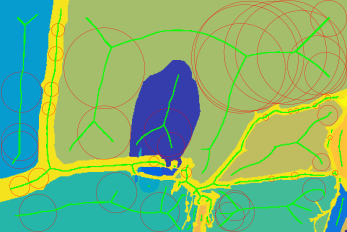
Computing symmetry probabilities











Orientation
Scale
Symmetry probability
Non-maximum suppression
Fast detection with decision forests
Symmetry "tokens"
Clustering

p_{medial} = \displaystyle\sum_{t=1}^{N_{tokens}} p_{t} = 1-p_{bg}
~0.5 sec per image
(40-60x faster than MIL)
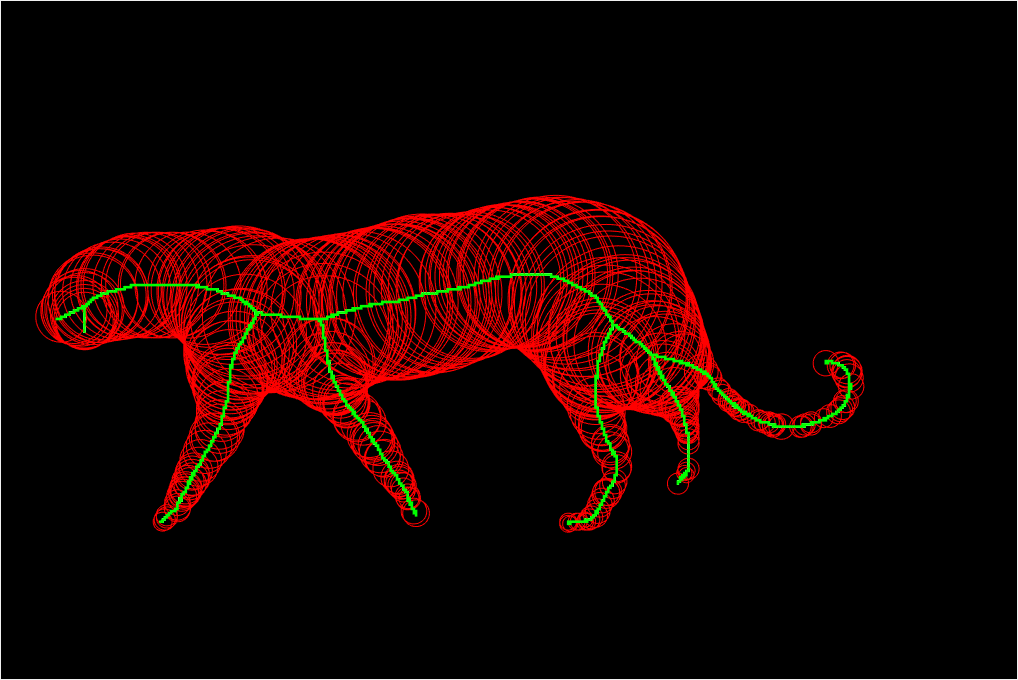
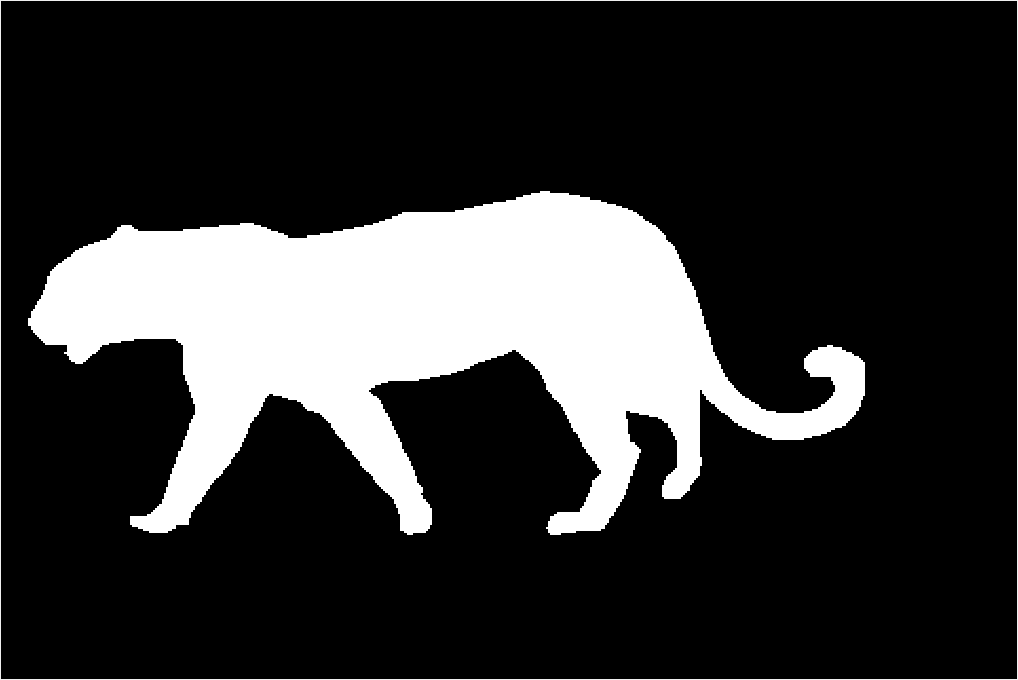
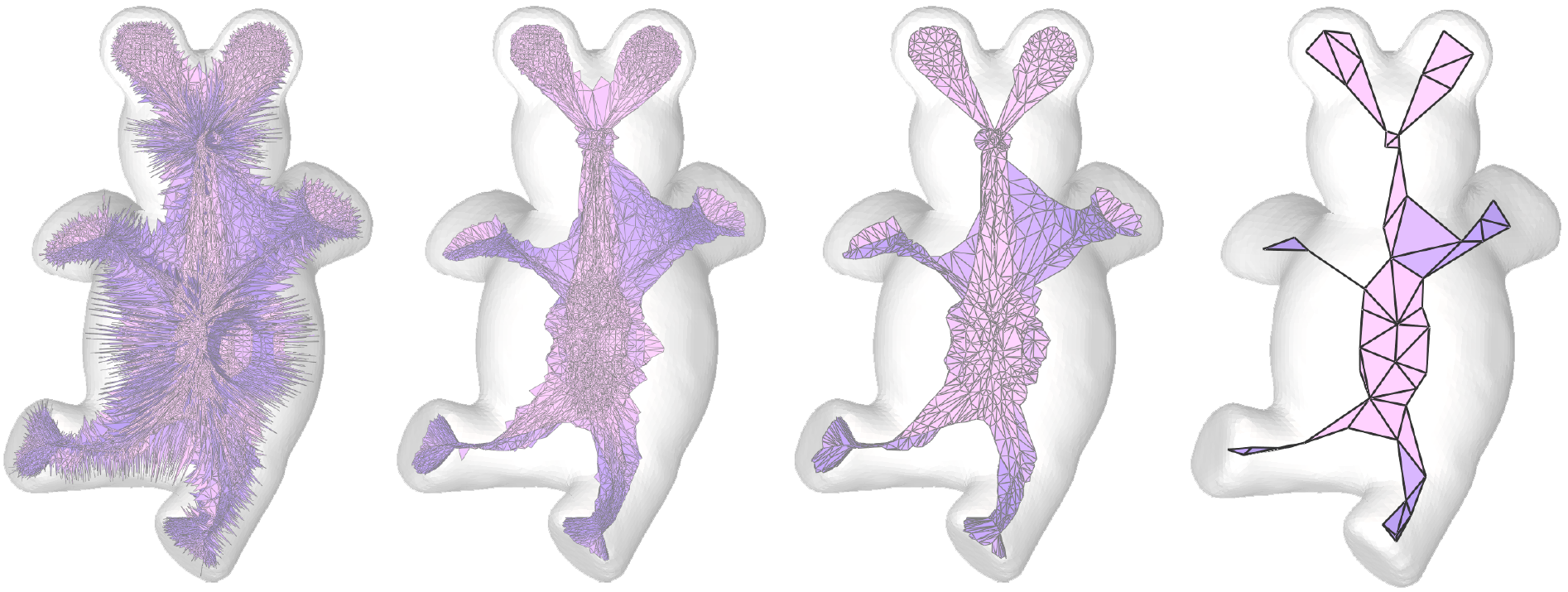
MAT should be invertible

MAT^{-1}
MAT^{-1}
Generative definition of medial disks



\mathbf{p}_i
r_i
\mathbf{p}_j
r_j
- f: summarizes patch (encoding)
- g: reconstructs patch (decoding)
f
g
D^I_{\mathbf{p}_i,r_i}
D^I_{\mathbf{p}_j,r_j}
\tilde{D}^I_{\mathbf{p}_j,r_j}
\tilde{D}^I_{\mathbf{p}_i,r_i}
[\bar{R}_i,\bar{G}_i,\bar{B}_i]
[\bar{R}_j,\bar{G}_j,\bar{B}_j]
e(
)\approx 0
,
,
e(
) \gg 0
AppearanceMAT definition
...
for all p,r
\text{Objective: } \min_{\mathbf{p},r} \sum_{i=1}^m e_{\mathbf{p}_i,r_i}
g \circ f \circ D
\text{Constraint: } I=\bigcup_{i=1}^m D^I_{\mathbf{p}_i,r_i}
A trivial solution
Select pixels as medial points (disks of radius 1).
Perfect reconstruction quality!
Not very useful in practice...
Goal: balance between sparsity and reconstruction
-
Dense representation
-
Low reconstruction error
-
Sparse representation
-
High reconstruction error
Favor the selection of larger disks...




Increasing \( w \)
Add regularization term to disk cost: \( c_{\mathbf{p},r} = e_{\mathbf{p},r} + \orange{w}(\frac{1}{r}) \).
...as long as they do not incur a high reconstruction error
AMAT is a weighted geometric set cover problem
WGSC is NP-hard!
PTAS exist
\Bigg\{
\Bigg\{
\Bigg\{
Set we want to cover
Covering elements (range)
Set costs
Cover 2D image
using disks of radii {1,...,R}
with costs \( c_{\mathbf{p},r}\)
Greedy algorithm
-
Compute all costs \( c_{\mathbf{p},r} \).
-
While image has not been completely covered:
-
Select disk \( D_{\mathbf{p^*},r^*} \) with lowest cost.
-
Add point \( (\mathbf{p^*},r^*,\mathbf{f}_{\mathbf{p^*},r^*}) \) to the solution.
-
Mark disk pixels as covered.
-
Update costs \( c_{\mathbf{p},r} \)
-
Approximation algorithms, Vijay V. Vazirani
AMAT Demo
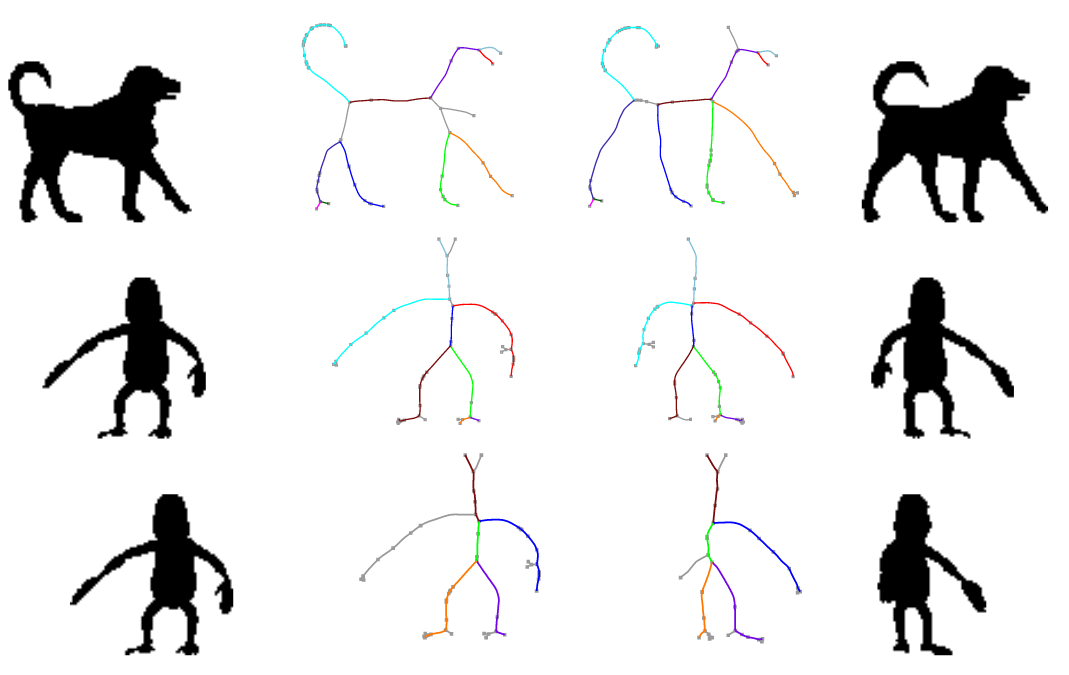
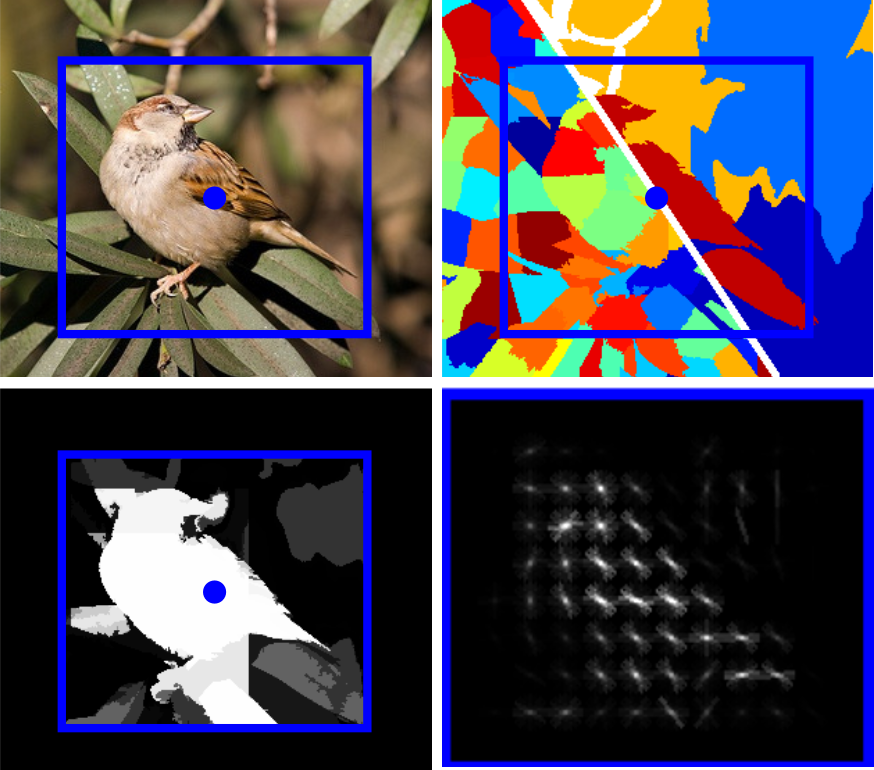
More reconstruction results













Input
MIL
GT-seg
GT-skel
AMAT
Grouping points together...

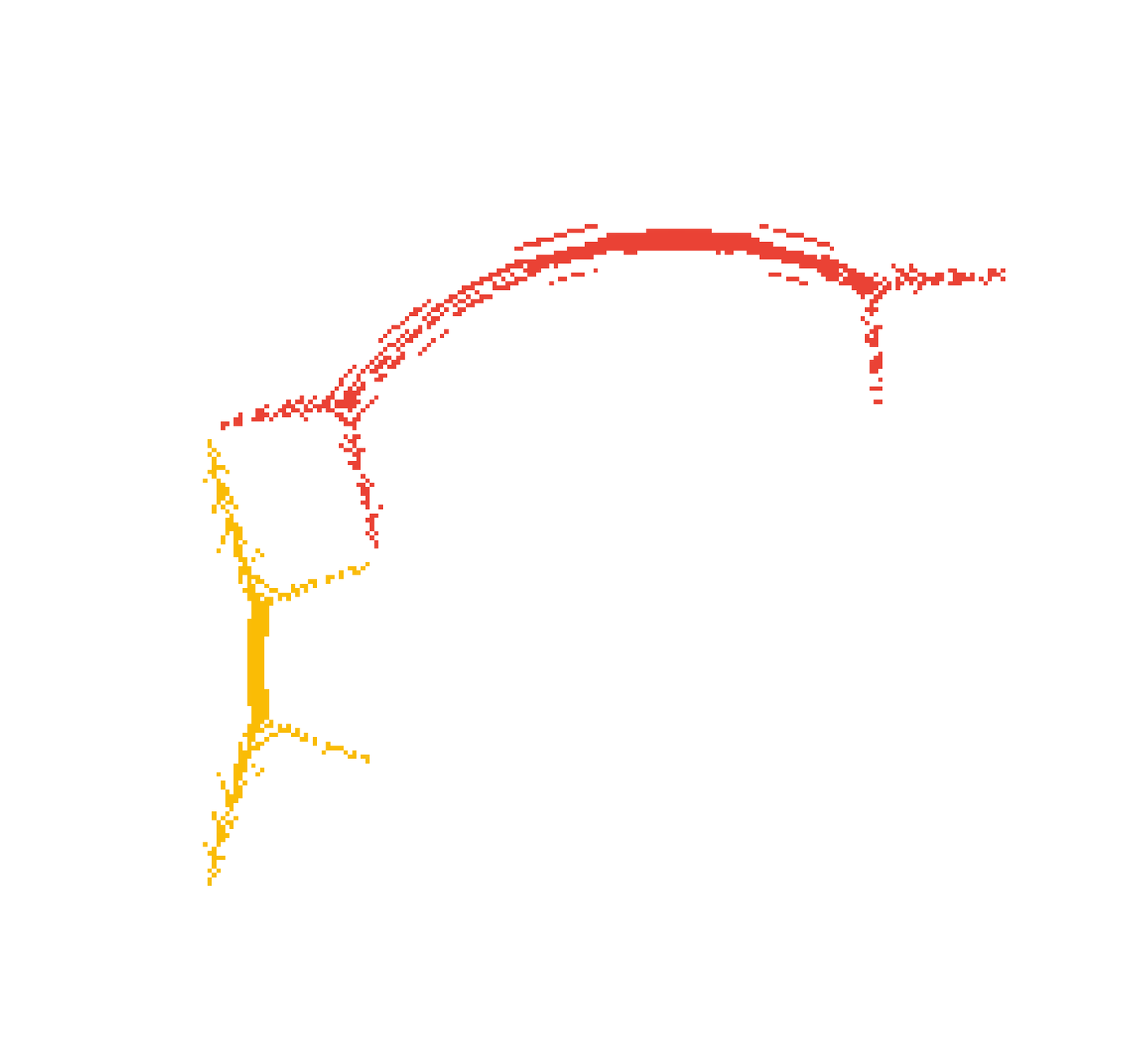
- space proximity
- smooth scale variation
- color similarity
color similarity
Input
AMAT
Groups
(color coded)
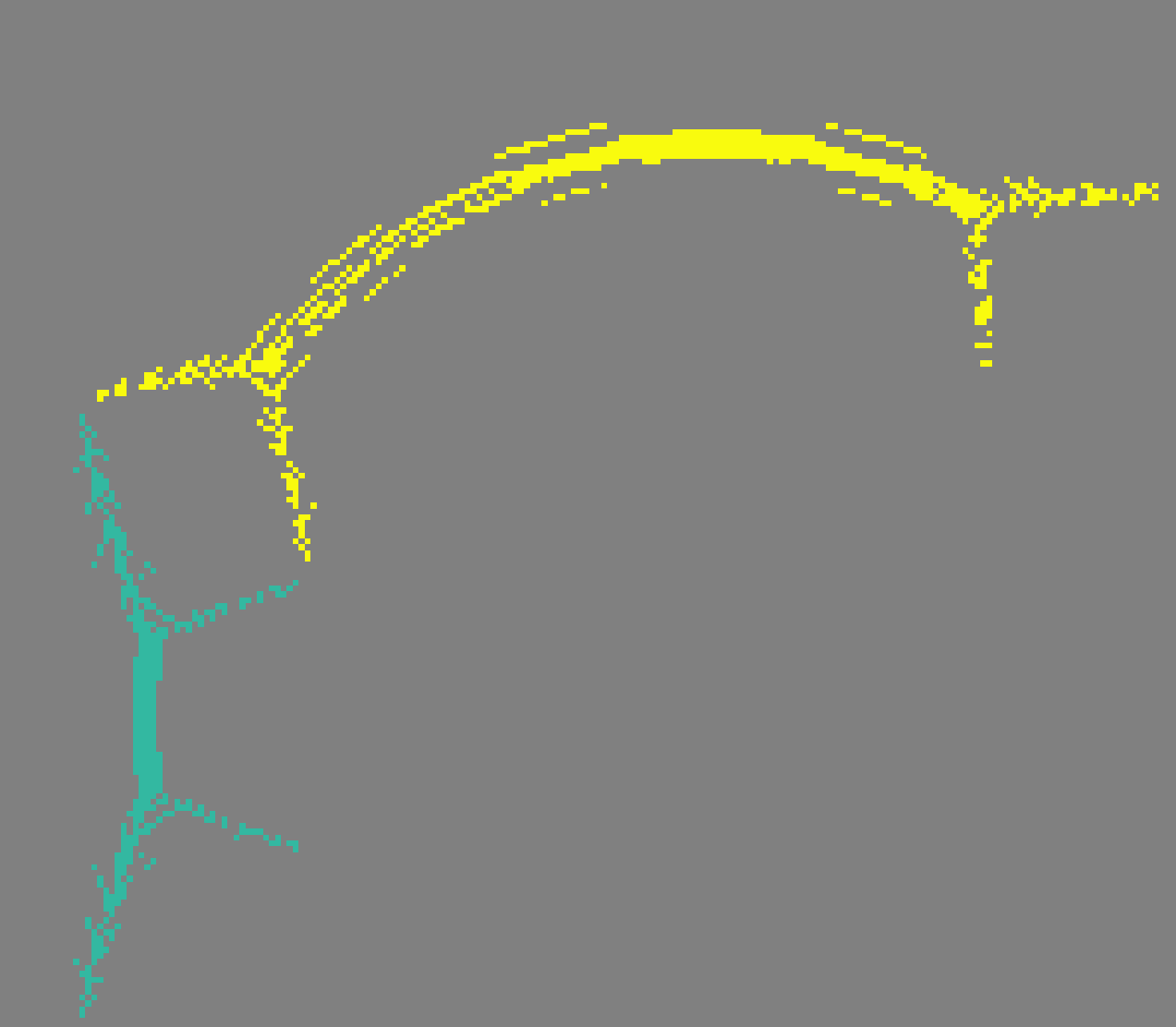
...opens up possibilities
Thinning
Segmentation
Object proposals
and more...
Qualitative results




Input
AMAT
Groups
Reconstruction
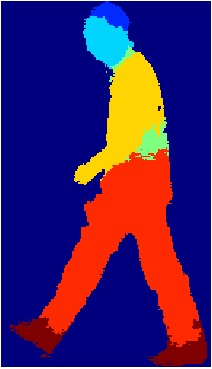
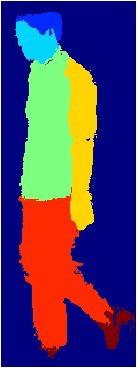
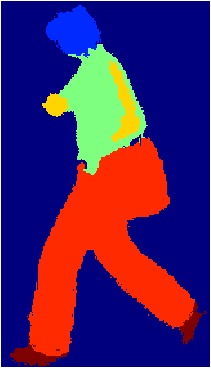
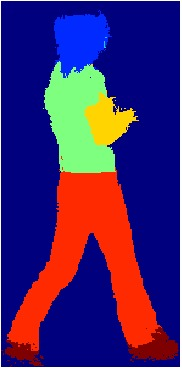
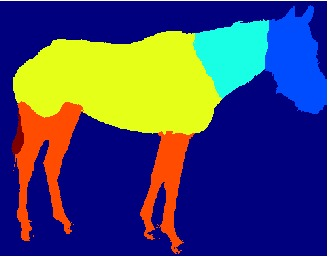
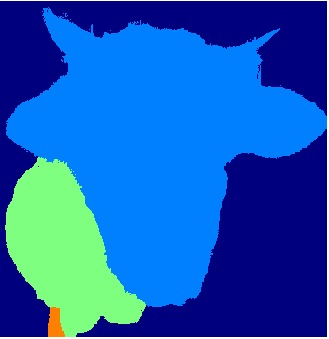
Part segmentation
Fully convolutional neural networks




P(person)
P(horse)
:
P(dog)

dog
person
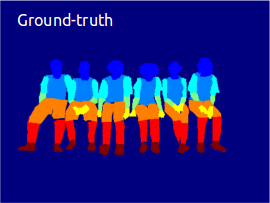
Finetune for part segmentation
head
torso
arms
legs
hands
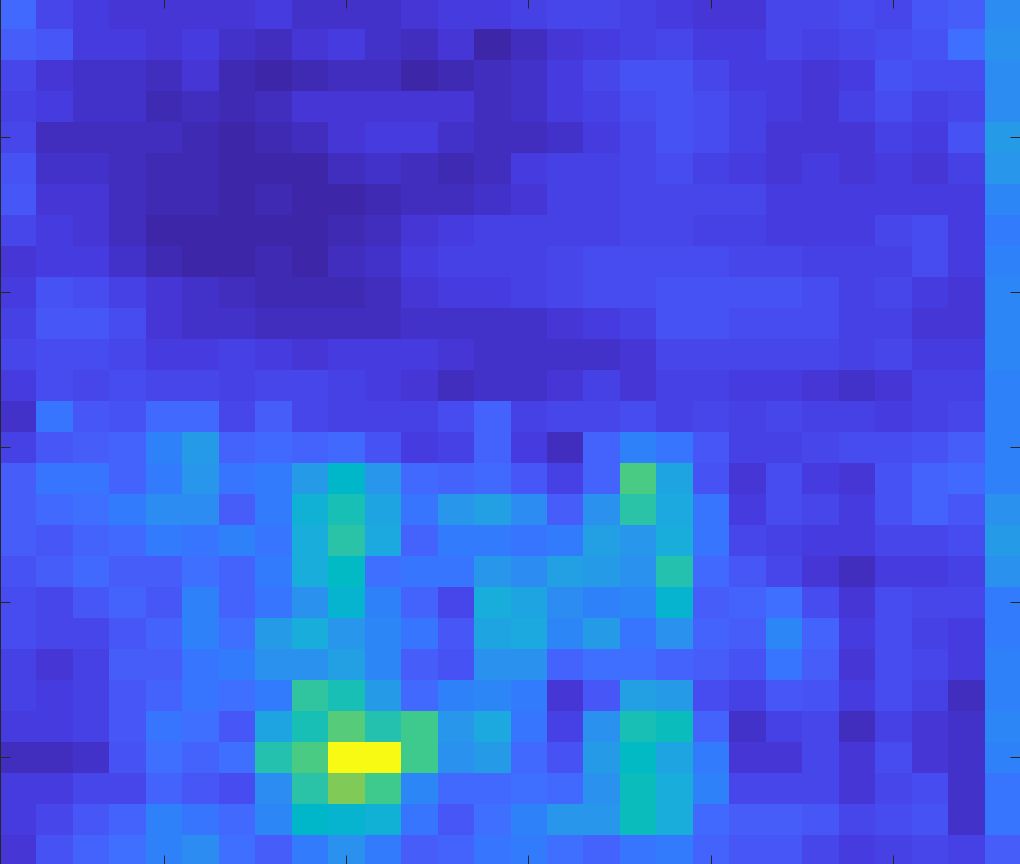
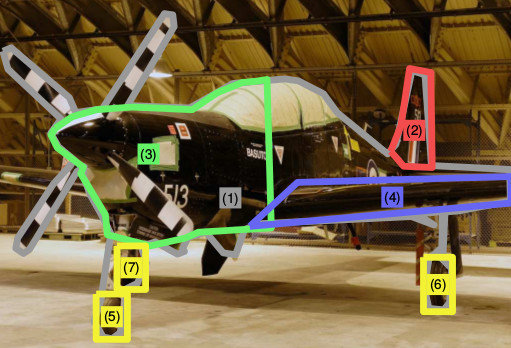
Part segmentation in natural images





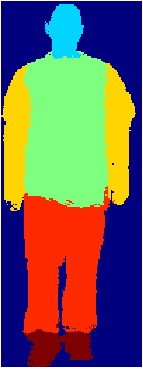




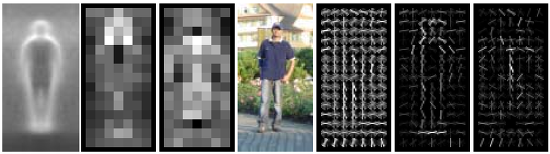
Small parts are lost due to downsampling

RGB: 152x152
L1: 142x142
L2: 71x71
L3: 63x63
L4: 55x55
L5 25x25
L6 21x21
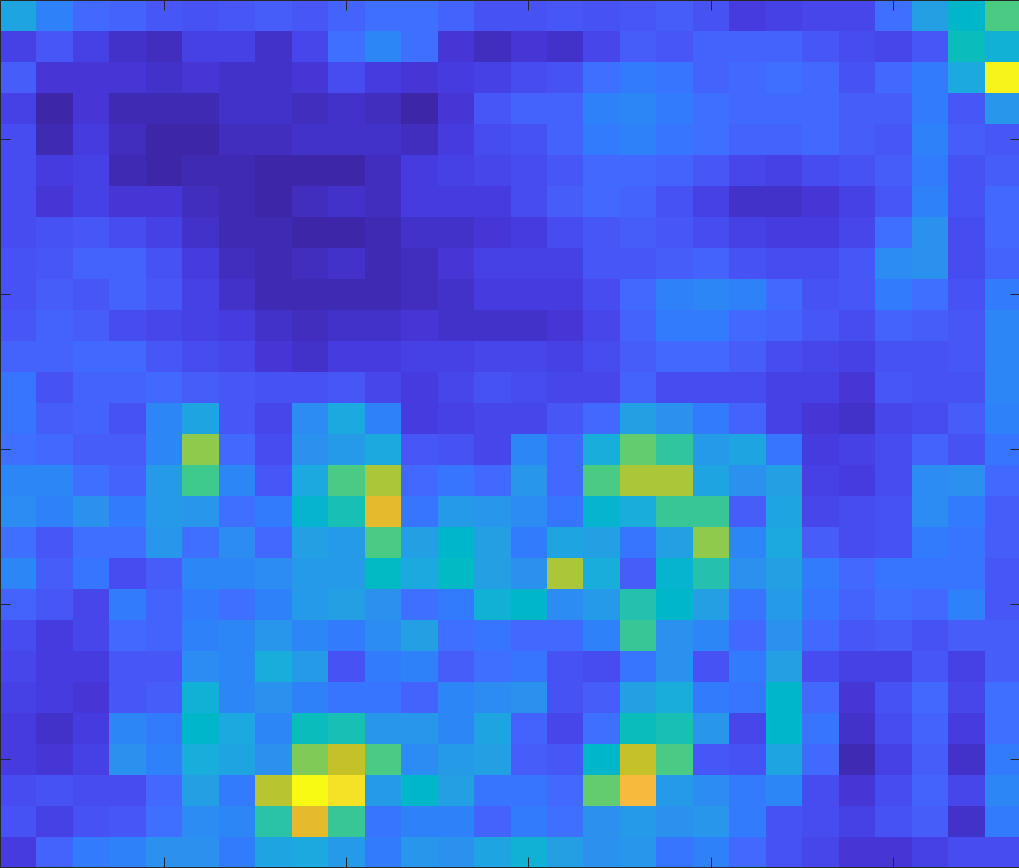
Extract features at multiple scales

Scale 1x
Scale 1.5x
Scale 2x
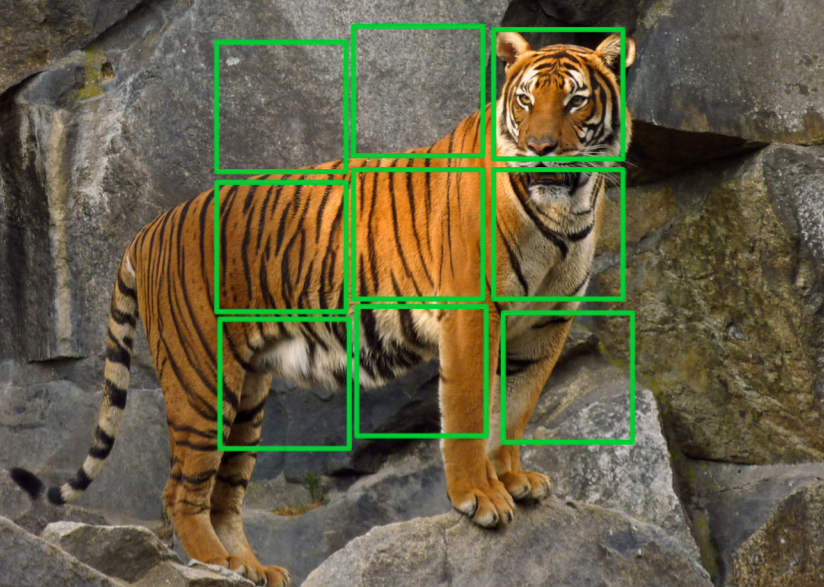
Combine with object detector
Towards real-time object detection with region proposal networks, S.Ren et al., NIPS 2015
Find scale that is closest to the network's nominal scale
minimize:\, |\green{h_N}-\red{h_b}| + |\green{w_N}-\red{w_b}|
: bounding box adjusted for scale
: default size of the network's input
w
h
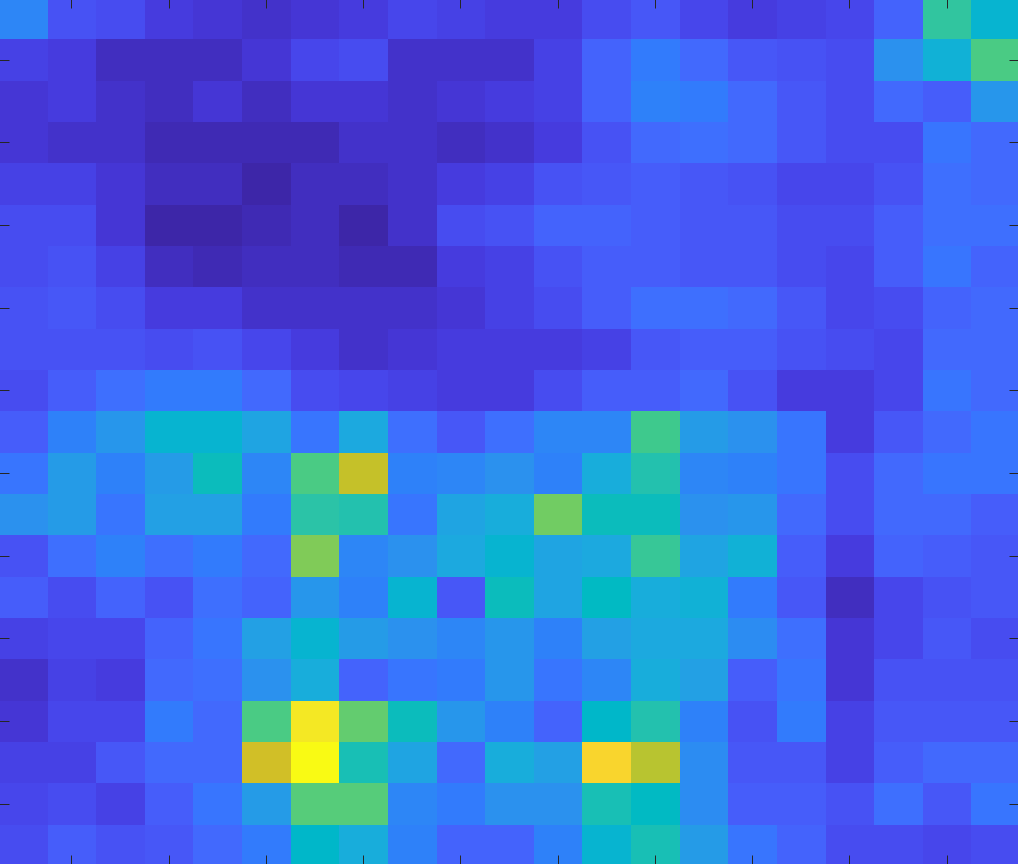
Use features from the ideal scale
Multi-scale analysis improves results...

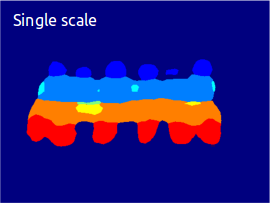
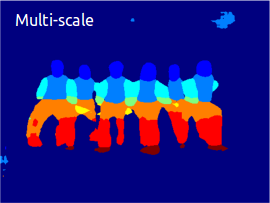
...and is efficient for images with many objects
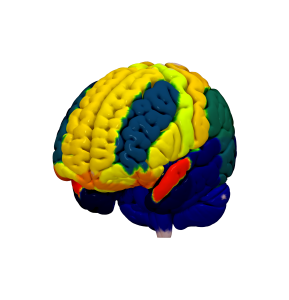
Segmenting brain "parts" is also important
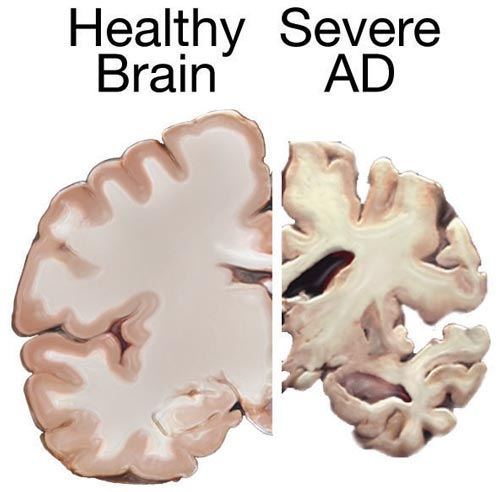
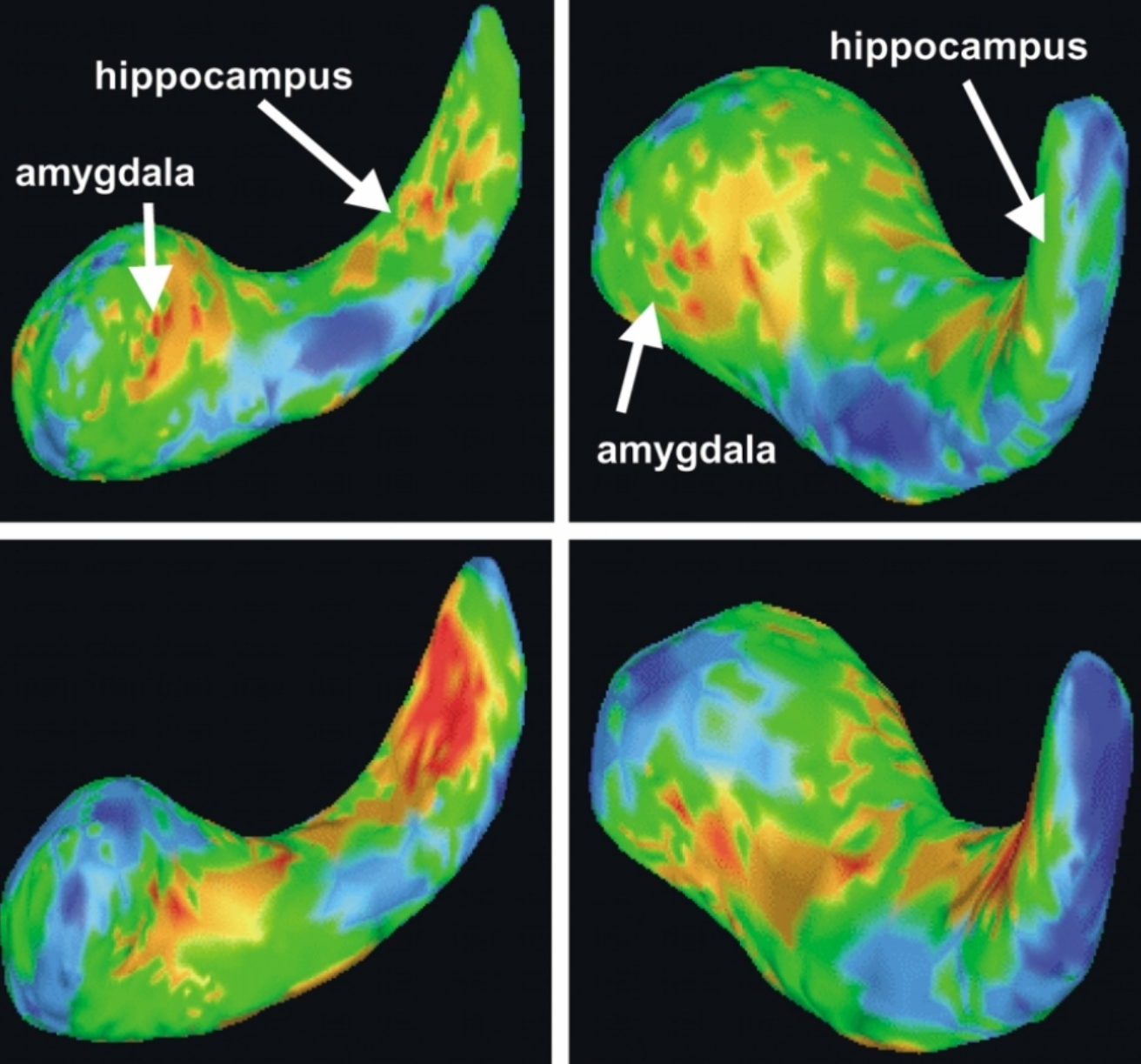
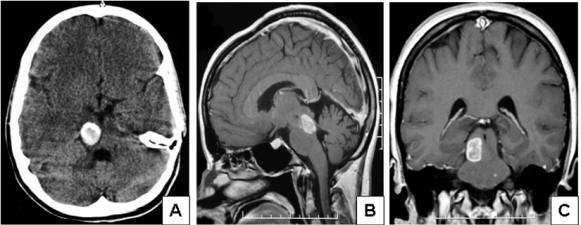
Alzheimer's:
structure degeneration
Schizophrenia: volume abnormalities
[Shenton M.E. et al., Psychiatry Res. 2002]
Tumors: avoid radiation on sensitive regions
[Hoehn D. et al., Journal of Medical Cases, 2012]
Why automatic segmentation?
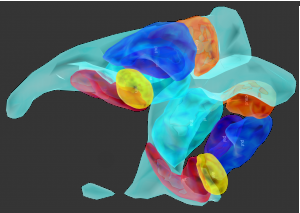
Putamen
Ventricle
Caudate
Amygdala
Hippocampus
Visualization and inspection
No need for manual annotation
(time consuming, need experts,
limited reproducibility)
Non-invasive diagnosis and treatment
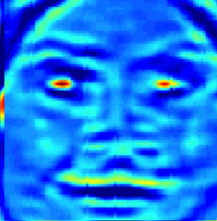
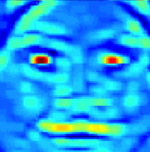
Intensity in MRI is not enough


Spatial arrangement patterns matter
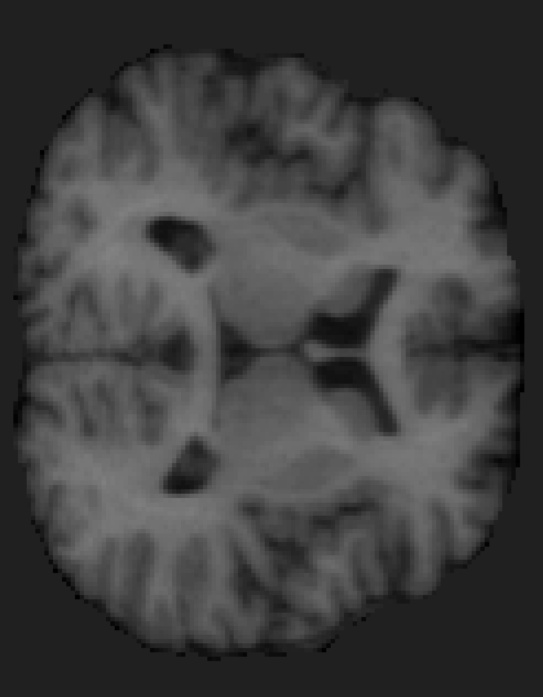
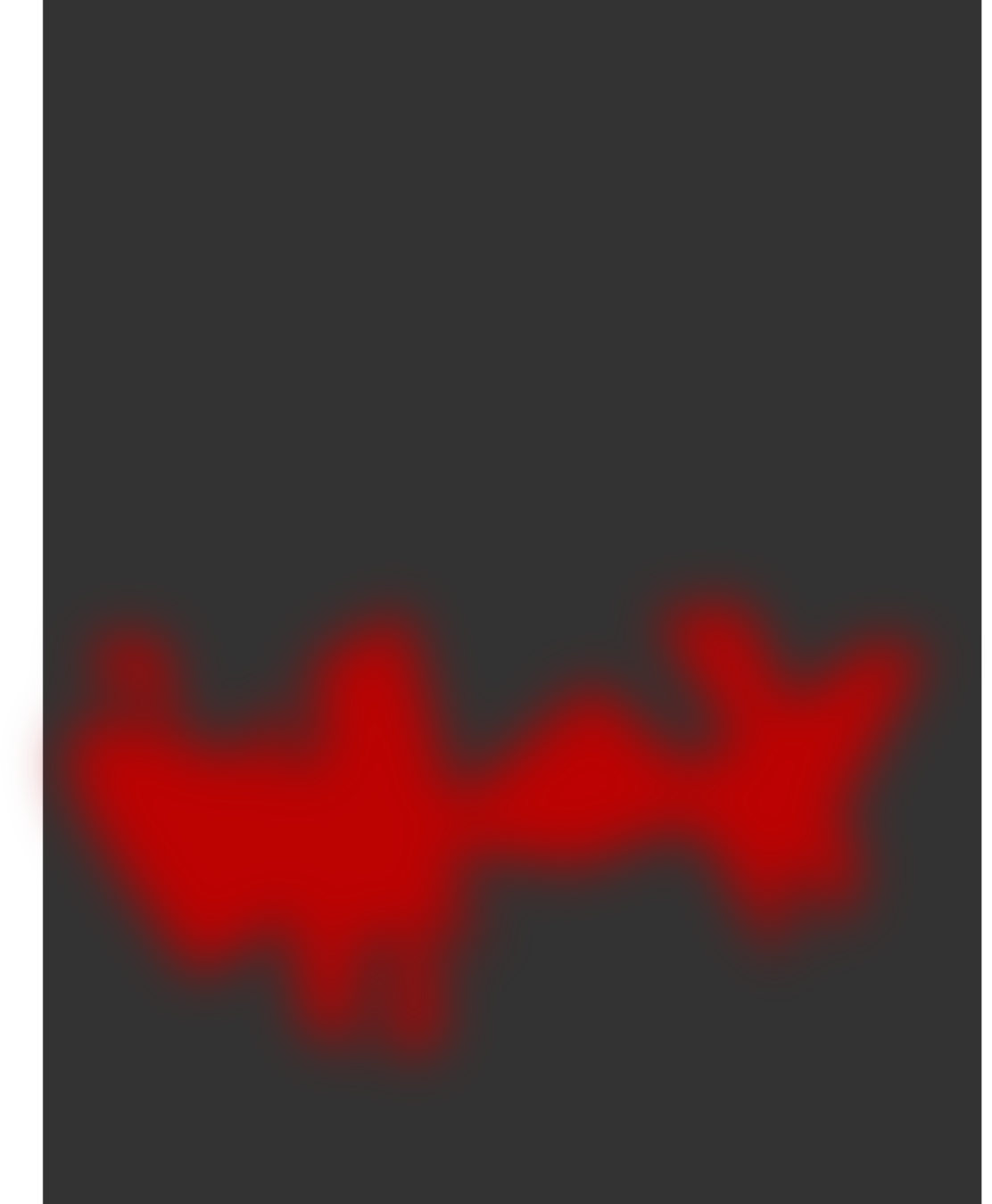
Segmenting subcortical structures in 2D FMRI with FCNNs
P(thalamus)
P(putamen)
:
P(caudate)
:
P(white matter)


2D slice
thalamus
white matter
From 2D slice to 3D volume segmentation



CNN architecture
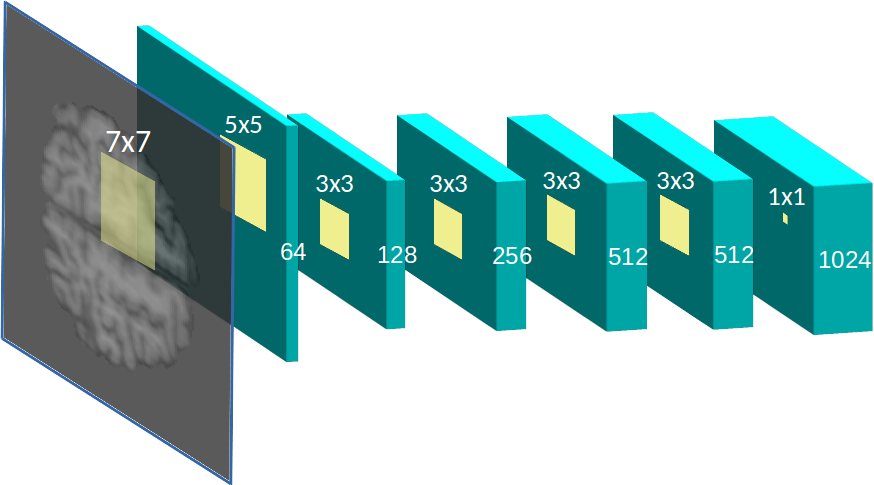
-
16 layers including max-pooling and dropout.
-
Dilated convolutions for higher resolution.
-
Compact architecture (~4GB GPU RAM)
MRF enforces volume homogeneity
S^{*}=\text{argmin}E(S) = \sum_{i\in\mathcal{V}}\green{U_i} + \lambda\sum_{(i,j)\in\mathcal{E}}\orange{P_{ij}}
i
j
f(CNN output)
d(intensities)
Solve with \(\alpha\)-expansion
MRF removes spurious responses
CNN
CNN+MRF
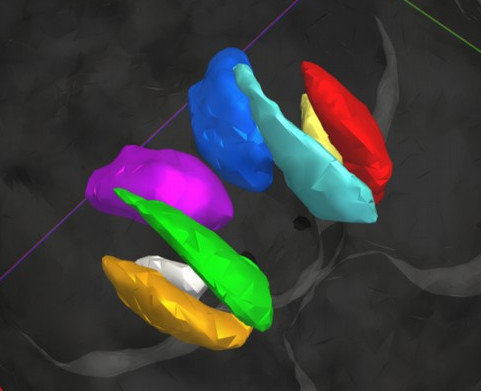
3D segmentation results
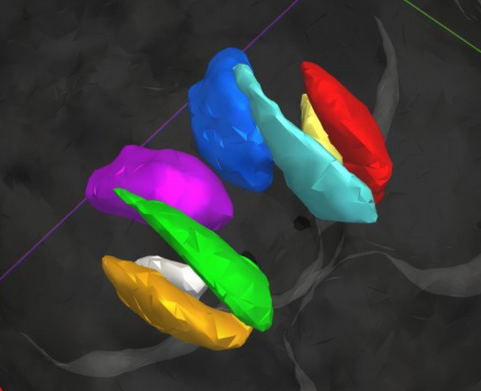
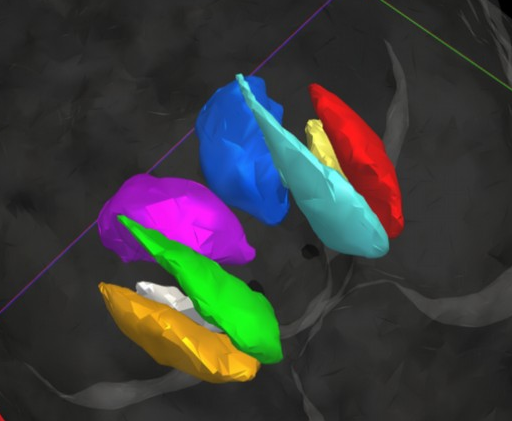
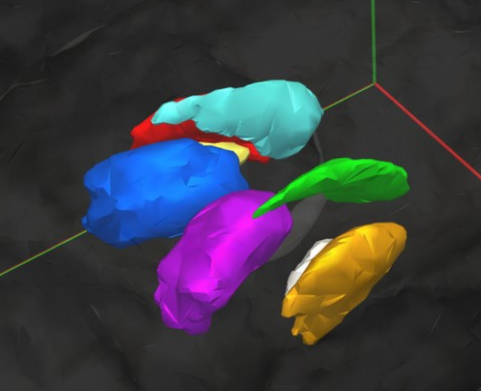
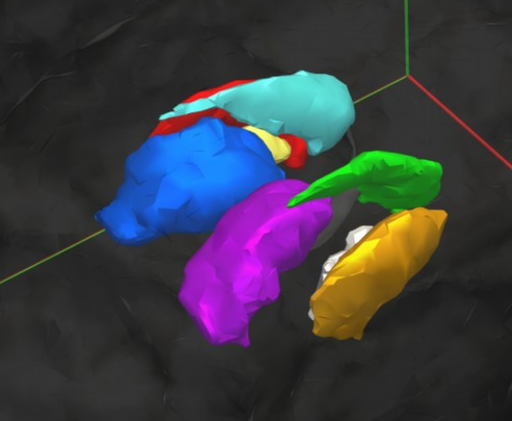
Our results
Groundtruth
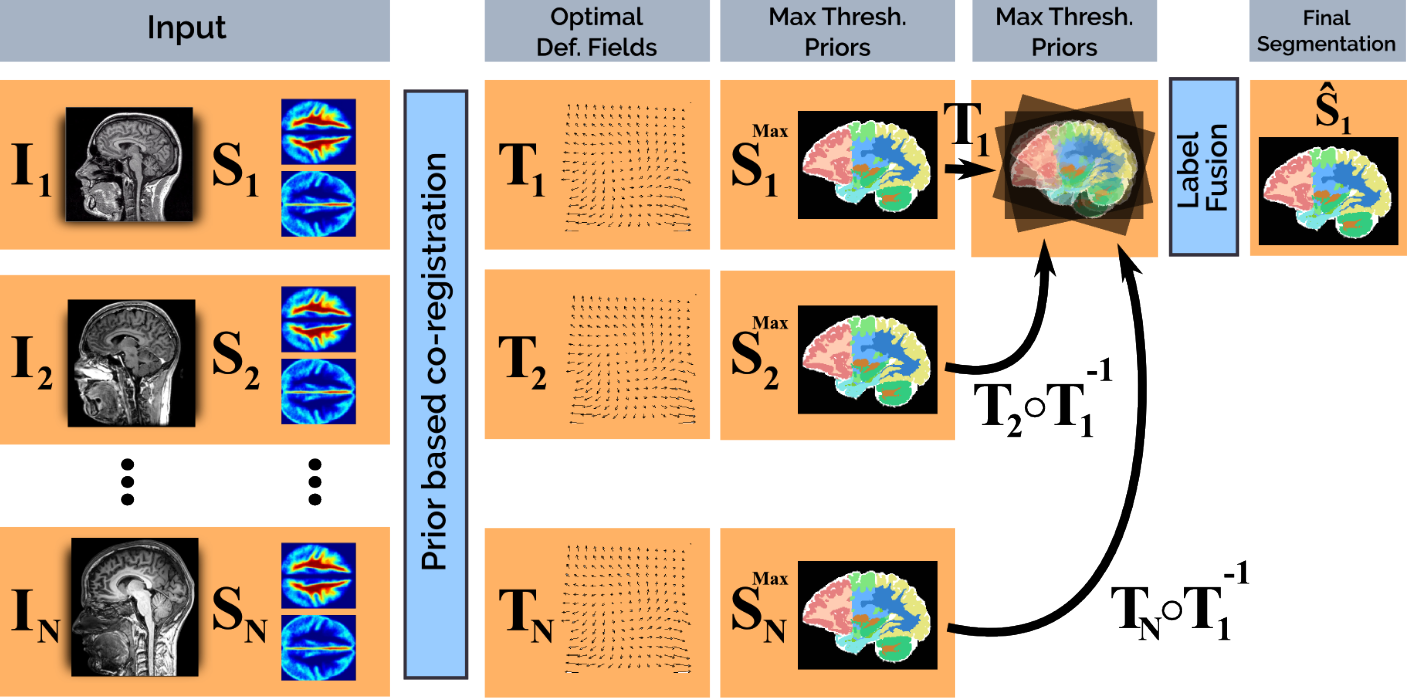
Deep priors for coregistration and cosegmentation
Future work
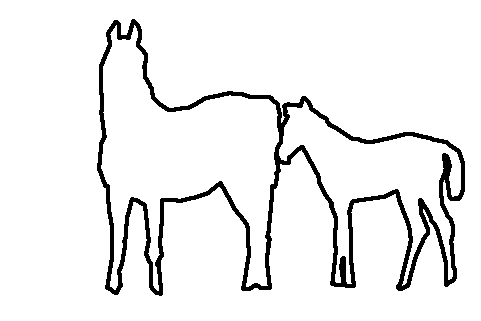
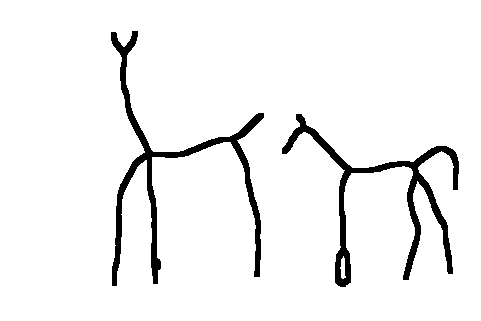
Recognition in line drawings
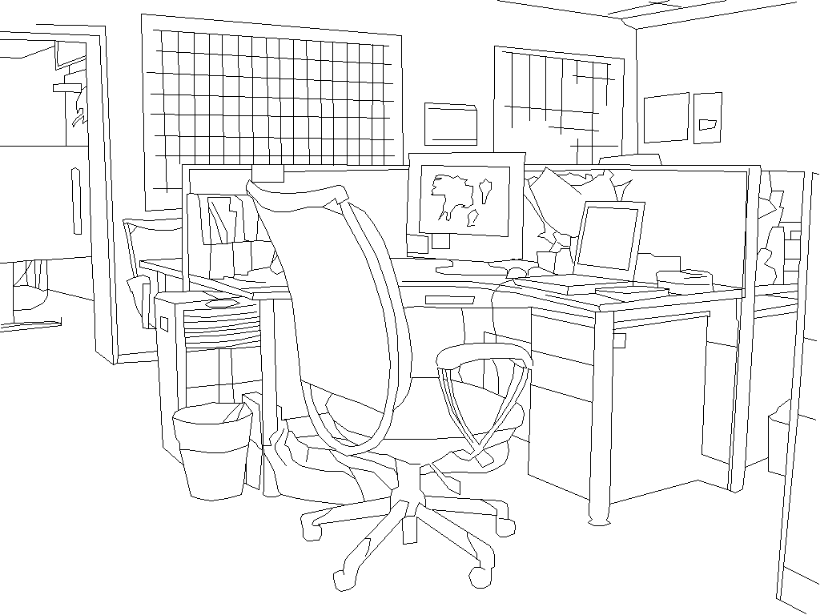
Chair
Monitor
Basket
Office
Intuitive form of communication


Sketch-based image retrieval
3D models from sketches
Grouping is key
Smart scribbles for sketch segmentation, Norris et al., EU computer graphics forum
Example-based sketch segmentation and labelling using CRFs, Schneider et al., TOG 2016
Gestalt grouping principles
Proximity
Parallelism
Continuity
Closure
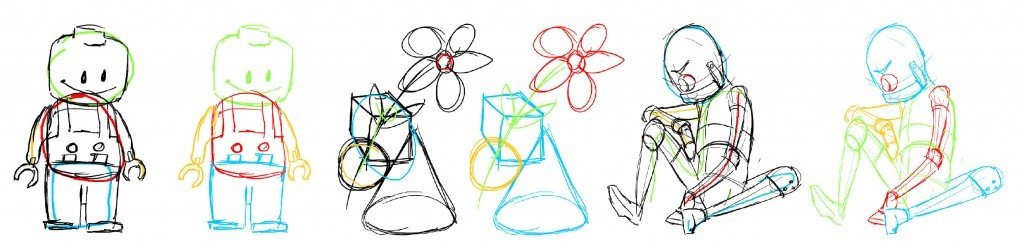
Learn to group from synthetic data
Use CNN to extract point embeddings
\mathbf{e}_1
\mathbf{e}_2
\mathbf{e}_3
||\mathbf{e}_1 - \mathbf{e}_3|| \approx 0
||\mathbf{e}_1 - \mathbf{e}_2|| \gg 0
Points on the same shape have similar embeddings
Points on different shapes have dissimilar embeddings
Cluster embeddings to obtain groups
RNNs for shape embeddings
\mathbf{p}_1
\mathbf{p}_2
\mathbf{p}_3
\mathbf{p}_4
\mathbf{p}_5
N
\mathbf{p}_1
\mathbf{h}_1
N
\mathbf{p}_2
\mathbf{h}_2
N
N
N
\mathbf{p}_3
\mathbf{h}_3
\mathbf{p}_4
\mathbf{h}_4
\mathbf{p}_5
\mathbf{h}_5
triangle
square
circle
-
grouping
-
classification
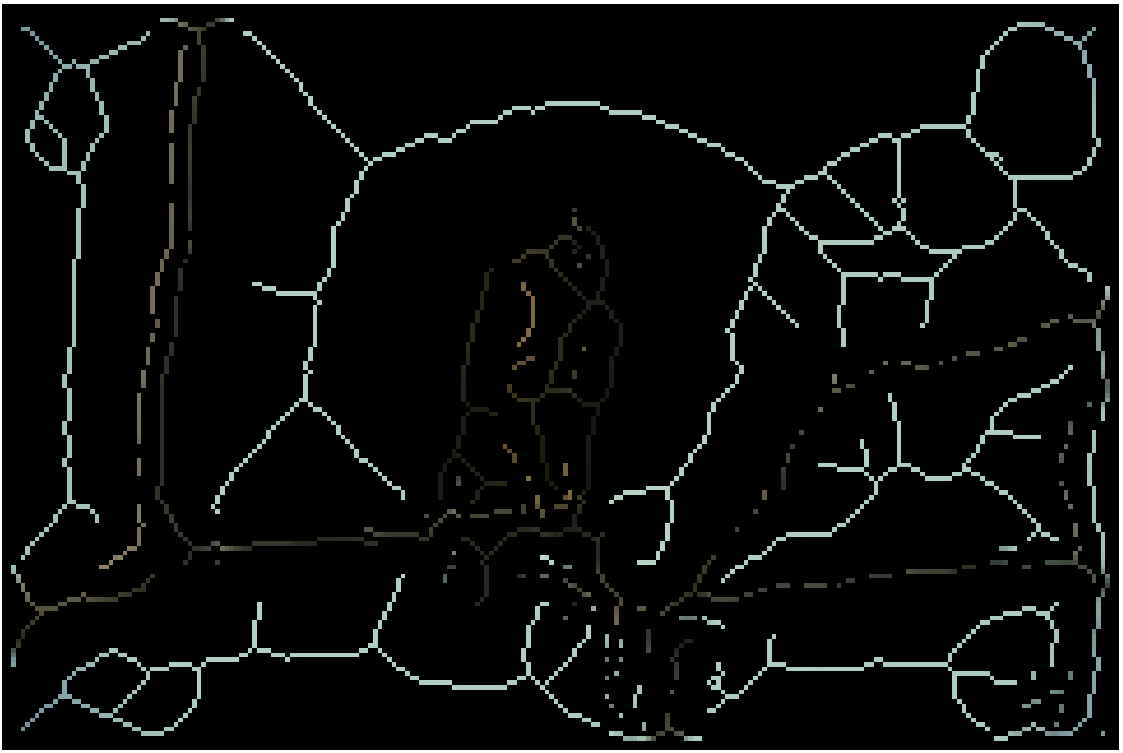
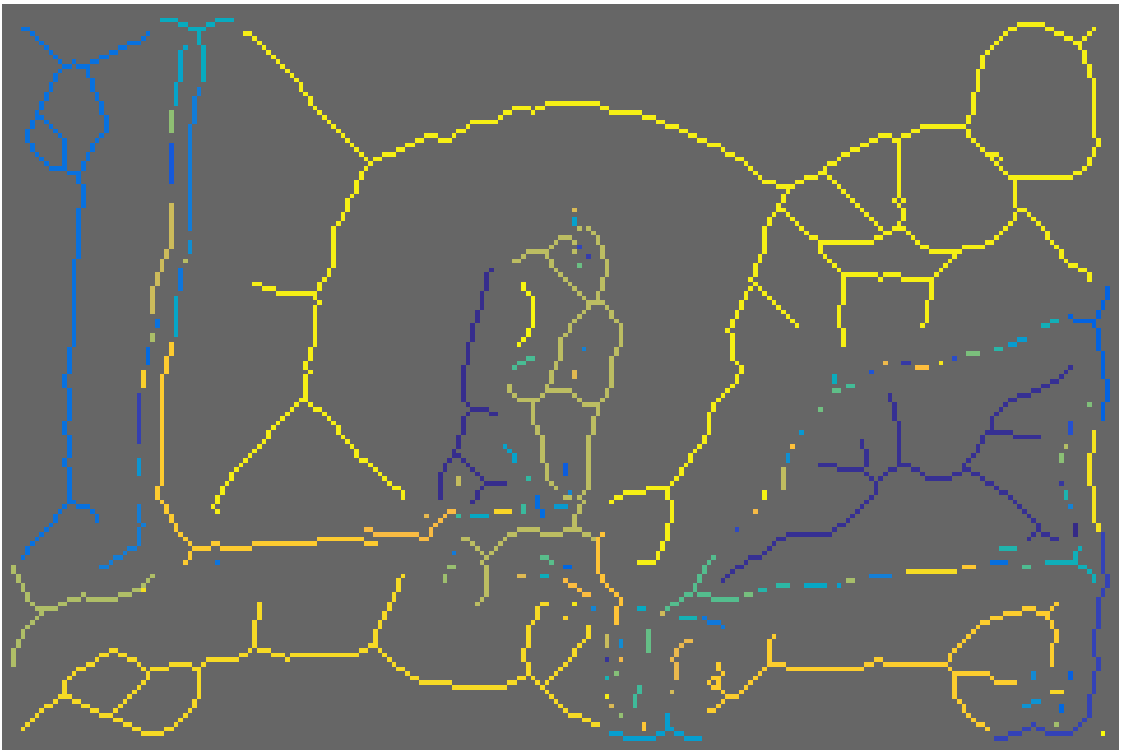
Application to complex scenes?

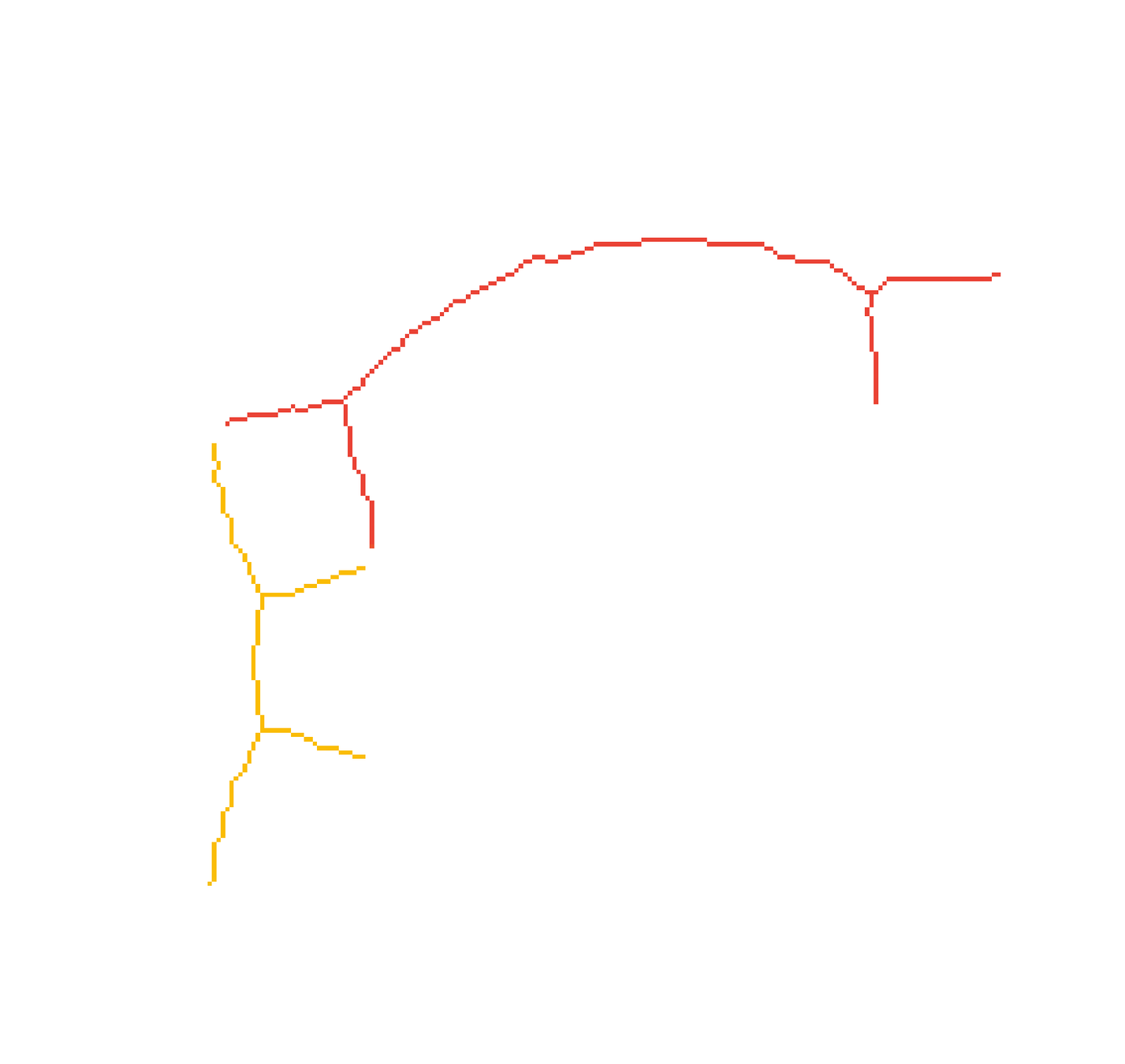
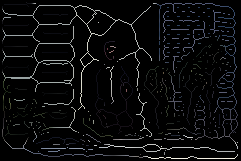
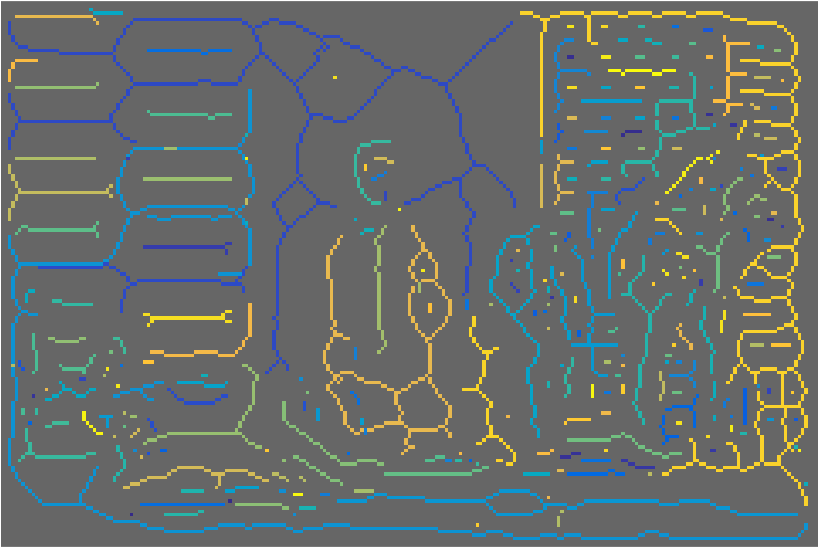
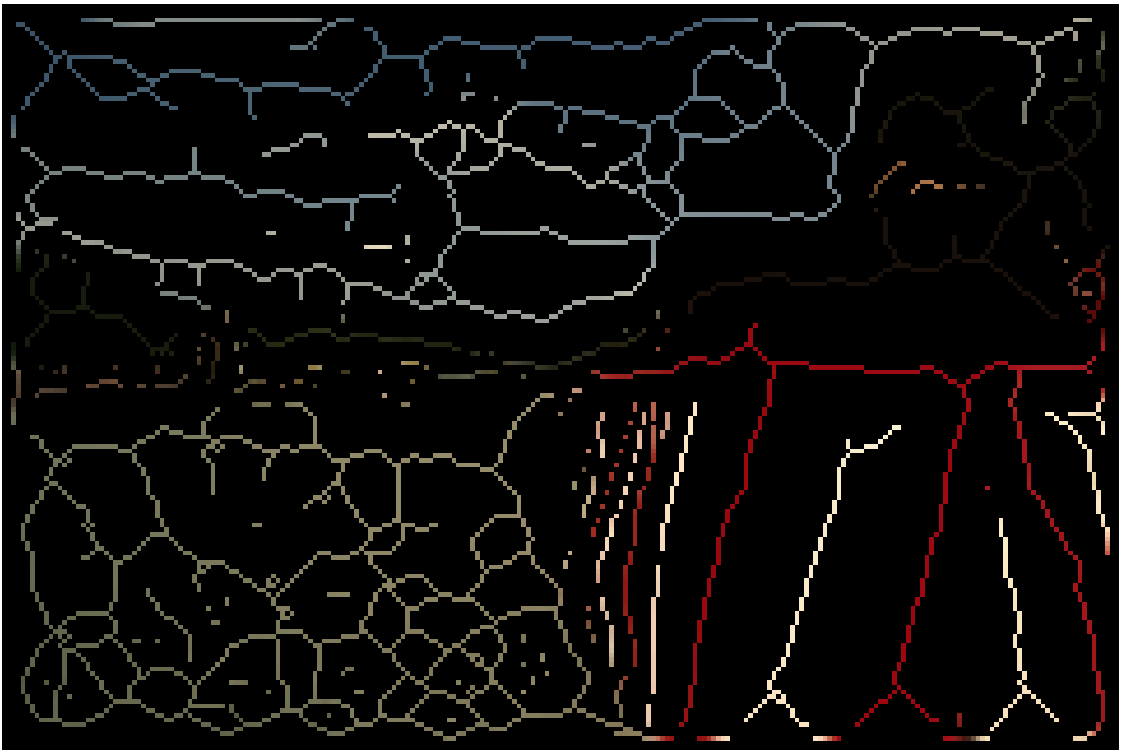
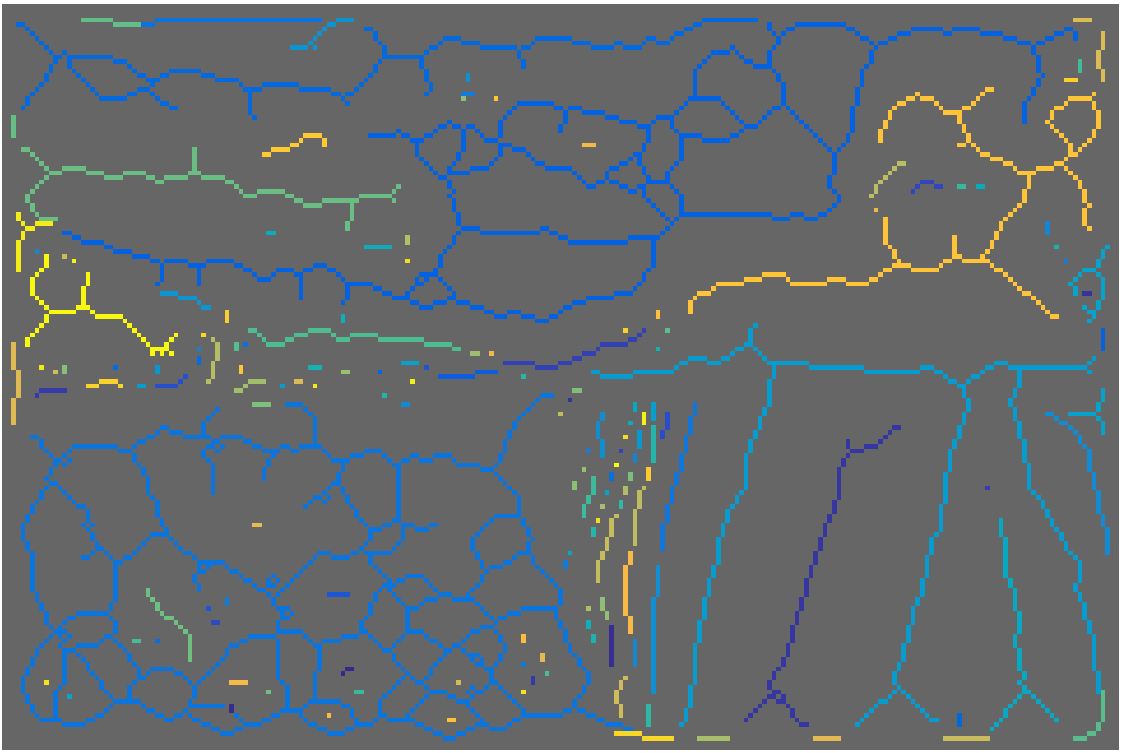
Edge detector result
Boundaries and medial axes are dual representations of objects
edge loss \(l_e\)
skeleton loss \(l_s\)
Edge detection network
Skeleton detection network
But they are usually extracted independently
Exploit duality to jointly learn boundaries and skeletons

edge loss \(l_e\)
skeleton loss \(l_s\)
consistency loss \(l_c\)
L_{total} = l_e + l_s + l_c
-
Single network (more efficient)
-
Joint optimization should improve accuracy
Autoencoders for image patches


Input patch \(P\)
Reconstruction \(\tilde P\)
Reconstruction loss \(L(P, \tilde{P})\)
Self supervised task
encoder
decoder
Learn homogeneity for textured patches from segmentation data
Rank loss: L( , ) < L( , )


high homogeneity
low homogeneity
Applications


Painterly rendering
Interactive segmentation
Constrained image editing
Acknowledgements









Mahsa Shakeri
Enzo Ferrante
Siddhartha Chandra
Eduard Trulls
P.A. Savalle
George Papandreou
Sven Dickinson
Nikos Paragios
Iasonas Kokkinos
Andrea Vedaldi
Thank you for your attention!


Symmetry
Medical imaging
Segmentation and parts
Learning mid-level representations for computer vision
By tsogkas




