Loss Landscape and
Performance in Deep Learning
M. Geiger, A. Jacot, S. d’Ascoli, M. Baity-Jesi,
L. Sagun, G. Biroli, C. Hongler, M. Wyart
Stefano Spigler
arXivs: 1901.01608; 1810.09665; 1809.09349

(Supervised) Deep Learning
\(<-1\)
\(>+1\)
- Learning from examples: train set
- Is able to predict: test set
- Not understood why it works so well!
\(f(\mathbf{x})\)


-
How many data are needed to learn?
- What network size?
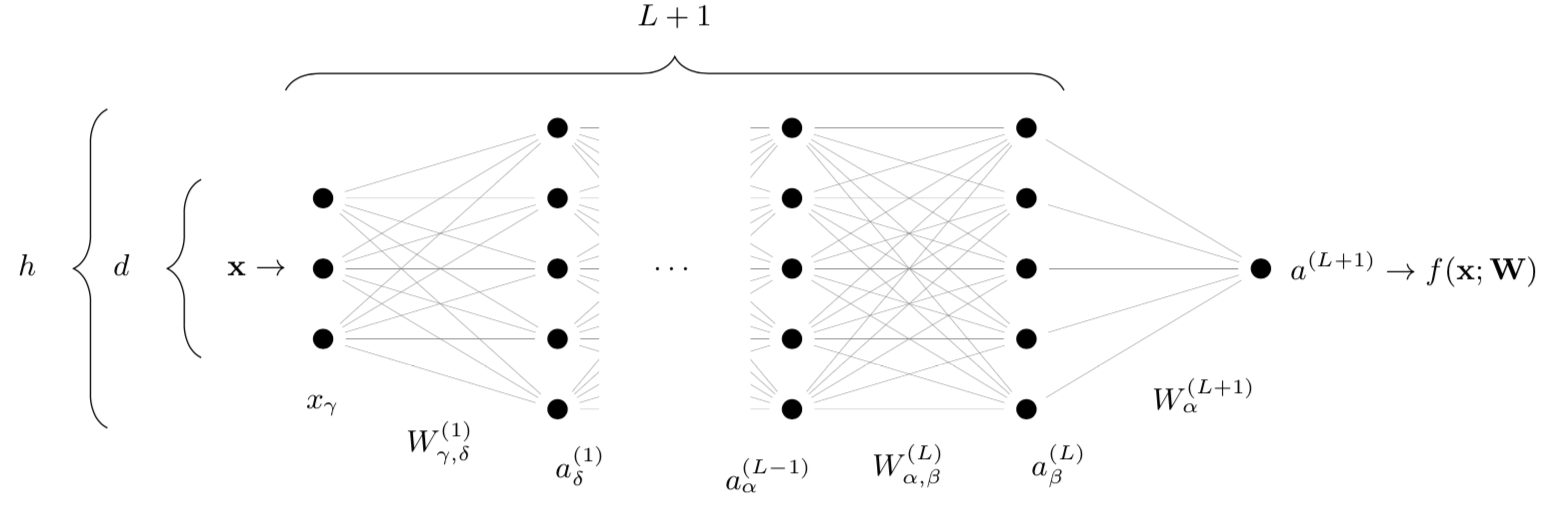
Set-up: Architecture
- Deep net \(f(\mathbf{x};\mathbf{W})\) with \(\textcolor{red}{N}\sim h^2L\) parameters
depth \(L\)
width \(\color{red}h\)
\(f(\mathbf{x};\mathbf{W})\)
- Alternating linear and nonlinear operations!
\(W_\mu\)
Set-up: Dataset
- \(\color{red}P\) training data:
\(\mathbf{x}_1, \dots, \mathbf{x}_P\)
- Binary classification:
\(\mathbf{x}_i \to \mathrm{label}\ y_i = \pm1\)
- Independent test set to evaluate performance
Example - MNIST (parity):
70k pictures, digits \(0,\dots,9\);
use parity as label
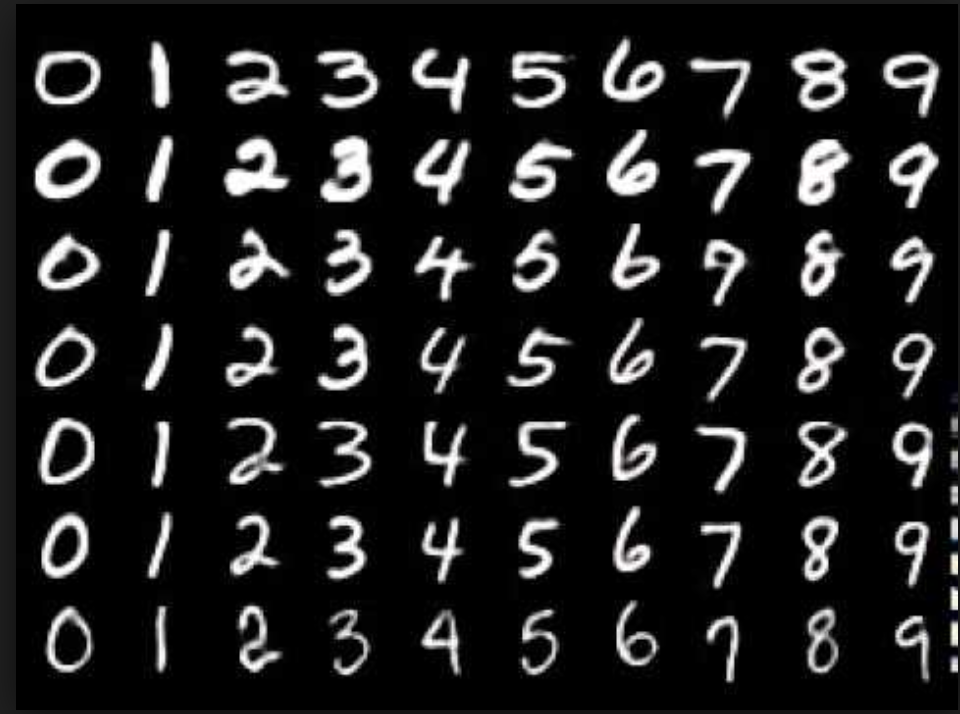
\(\pm1=\) cats/dogs, yes/no, even/odd...
Outline
Vary network size \(\color{red}N\) (\(\sim\color{red}h^2\)):
- Can networks fit all the \(\color{red}P\) training data?
- Can networks overfit? Can \(\color{red}N\) be too large?
\(\to\) Long term goal: how to choose \(\color{red}N\)?
\(h\)
Learning
-
Find parameters \(\mathbf{W}\) such that \(\mathrm{sign} f(\mathbf{x}_i; \mathbf{W}) = y_i\) for \(i\in\) train set
-
Minimize some loss!
-
\(\mathcal{L}(\mathbf{W}) = 0\) if and only if \(y_i f(\mathbf{x}_i;\mathbf{W}) > 1\) for all patterns
\displaystyle \mathcal{L}(\mathbf{W}) = \sum_{i=1}^P {\color{red}\ell\left( {\color{black}y_i f(\mathbf{x}_i;\mathbf{W})} \right)}
(classified correctly with some margin)

Binary classification: \(y_i = \pm1\)
Hinge loss:
Learning dynamics = descent in loss landscape
-
Minimize loss \(\longleftrightarrow\) gradient descent
-
Start with random initial conditions!
Random, high dimensional, not convex landscape!
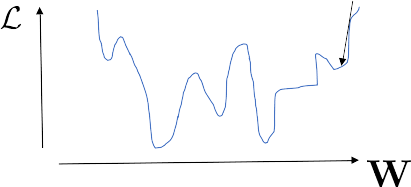
- Why not stuck in bad local minima?
- What is the landscape geometry?
- Many flat directions are found!
bad local minimum?
Soudry, Hoffer '17; Sagun et al. '17; Cooper '18; Baity-Jesy et al. '18 - arXiv:1803.06969
in practical settings:
Analogy with granular matter: Jamming
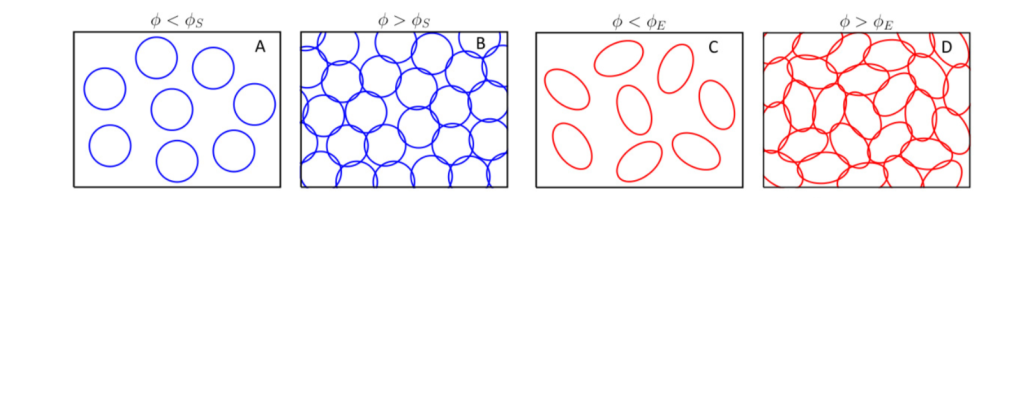
Upon increasing density \(\to\) transition
sharp transition with finite-range interactions
- random initial conditions
- minimize energy \(\mathcal{L}\)
- either find \(\mathcal{L}=0\) or \(\mathcal{L}>0\)
Random packing:
this is why we use the hinge loss!
Shallow networks \(\longleftrightarrow\) packings of spheres: Franz and Parisi, '16
Deep nets \(\longleftrightarrow\) packings of ellipsoids!
(if signals propagate through the net)
\(\color{red}N^\star < c_0 P\)
typically \(c_0=\mathcal{O}(1)\)

Theoretical results: Phase diagram
- When \(N\) is large, \(\mathcal{L}=0\)
- Transition at \(N^\star\)
\(\color{red}N^\star < c_0 P\)
\(\color{red}N^\star\)
network size
dataset size
Empirical tests: MNIST (parity)
Geiger et al. '18 - arXiv:1809.09349;
Spigler et al. '18 - arXiv:1810.09665
- Above \(\color{red}N^*\) we have \(\mathcal{L}=0\)
- Solid line is the bound \(\color{red}N^* < c_0 P\)
No local minima are found when overparametrized!
\(P\)
\(N\)
dataset size
network size
\(\color{red}N^\star < c_0 P\)
Landscape curvature
Spectrum of the Hessian (eigenvalues)
We don't find local minima when overparametrized... ...shape of the landscape?
Geiger et al. '18 - arXiv:1809.09349
Local curvature:
second order approximation

Information captured by Hessian matrix: \(\mathcal{H}_{\mu\nu} = \frac{\partial^2}{\partial_{\mathbf{W}_\mu}\partial_{\mathbf{W}_\nu}} \mathcal{L}(\mathbf{W})\)
w.r.t parameters \(W\)
Flat directions
Spectrum
Over-parametrized
Jamming
Under-parametrized
\(\sim\sqrt{\mathcal{L}}\)



\(\leftrightarrow\)
eigenvalues
eigenvalues
eigenvalues
\(\mathcal{L} = 0\)
Flat
Geiger et al. '18 - arXiv:1809.09349
Almost flat

\(N>N^\star\)
\(N\approx N^\star\)
\(N<N^\star\)
Spectrum
Spectrum
From numerical simulations:
(at the transition)
Dirac \(\delta\)'s
\left.\phantom{\int}\right\}
depth
Outline
Vary network size \(\color{red}N\) (\(\sim\color{red}h^2\)):
- Can networks fit all the \(\color{red}P\) training data?
- Can networks overfit? Can \(\color{red}N\) be too large?
\(\to\) Long term goal: how to choose \(\color{red}N\)?
\(h\)
Yes, deep networks fit all data if \(N>N^*\ \longrightarrow\) jamming transition
Generalization
Spigler et al. '18 - arXiv:1810.09665
Ok, so just crank up \(N\) and fit everything?
Generalization? \(\to\) Compute test error \(\epsilon\)
But wait... what about overfitting?
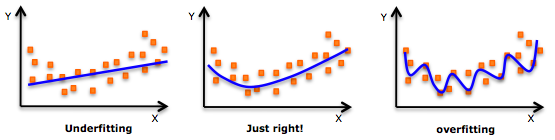
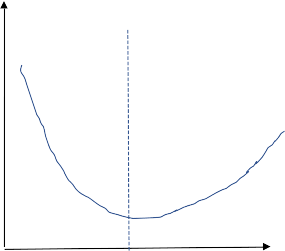
overfitting
\(N\)
\(N^*\)
Test error \(\epsilon\)

Train error
example: polynomial fitting
\(N \sim \mathrm{polynomial\ degree}\)
Overfitting?
Spigler et al. '18 - arXiv:1810.09665
-
Test error decreases monotonically with \(N\)!
- Cusp at the jamming transition
Advani and Saxe '17;
Spigler et al. '18 - arXiv:1810.09665;
Geiger et al. '19 - arXiv:1901.01608
"Double descent"

test error
\(N\)
\(N/N^*\)
(after the peak)
\(P\)
\(N\)
dataset size
network size
We know why: Fluctuations!
Ensemble average
- Random initialization \(\to\) output function \(f_{\color{red}N}\) is stochastic
- Fluctuations: quantified by average and variance
ensemble average over \(n\) instances:
\bar f^n_N(\mathbf{x}) \equiv \frac1n \sum_{\alpha=1}^n f_N(\mathbf{x}; \mathbf{W}_\alpha)
\(\phantom{x}\)
\(f_N(\mathbf{W}_1)\)
\(f_N(\mathbf{W}_2)\)
\(f_N(\mathbf{W}_3)\)
\(-1\)
\(-1\)
\(+1\)
\overbrace{\phantom{wwwwwwwwwwwwwwwwi}}
\(\bar f_N\)
\(-1!\)
\(\frac{{\color{red}-1-1}{\color{blue}+1}}{3}\cdots\)
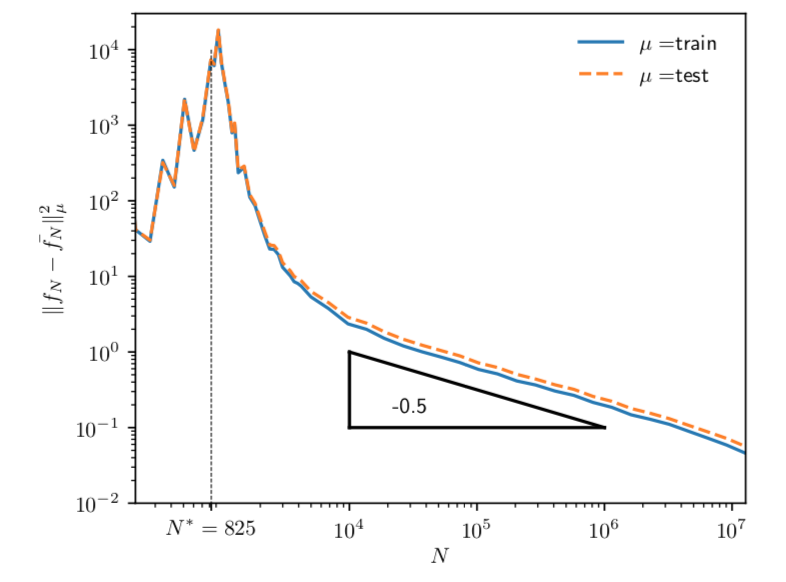
|\!|f_N - \bar f^n_N|\!|^2 \sim N^{-\frac12}
Explained in a few slides
Define some norm over the output functions:
ensemble variance (fixed \(n\)):
\(\phantom{x}\)
Fluctuations increase error
\( \{f(\mathbf{x};\mathbf{W}_\alpha)\} \to \left\langle\epsilon_N\right\rangle\)
Remark:
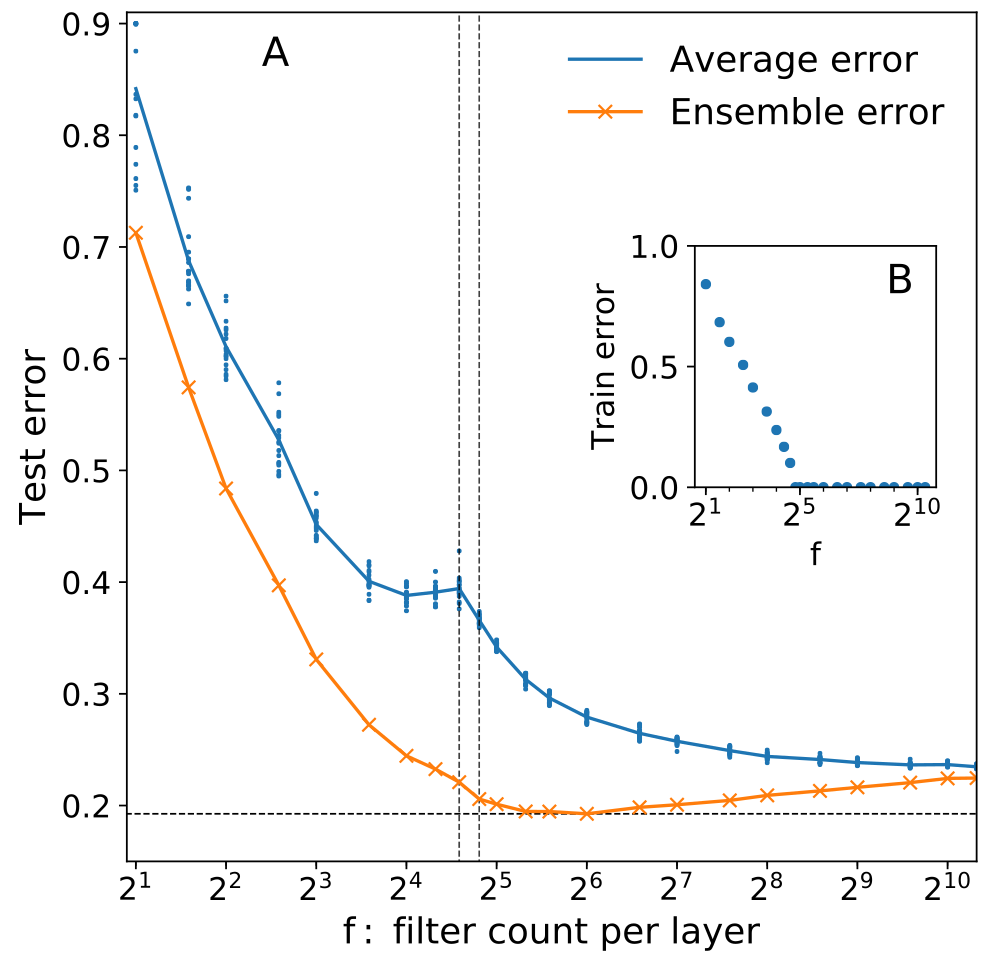
Geiger et al. '19 - arXiv:1901.01608

-
Test error increases with fluctuations
- Ensemble test error is nearly flat after \(N^*\)!
\(\bar f^n_N(\mathbf{x}) \to \bar\epsilon_N\)
test error of ensemble average
average test error
\(\neq\)
normal average
ensemble average
test error \(\epsilon\)
test error \(\epsilon\)
(CIFAR-10 \(\to\) regrouped in 2 classes)
(MNIST parity)
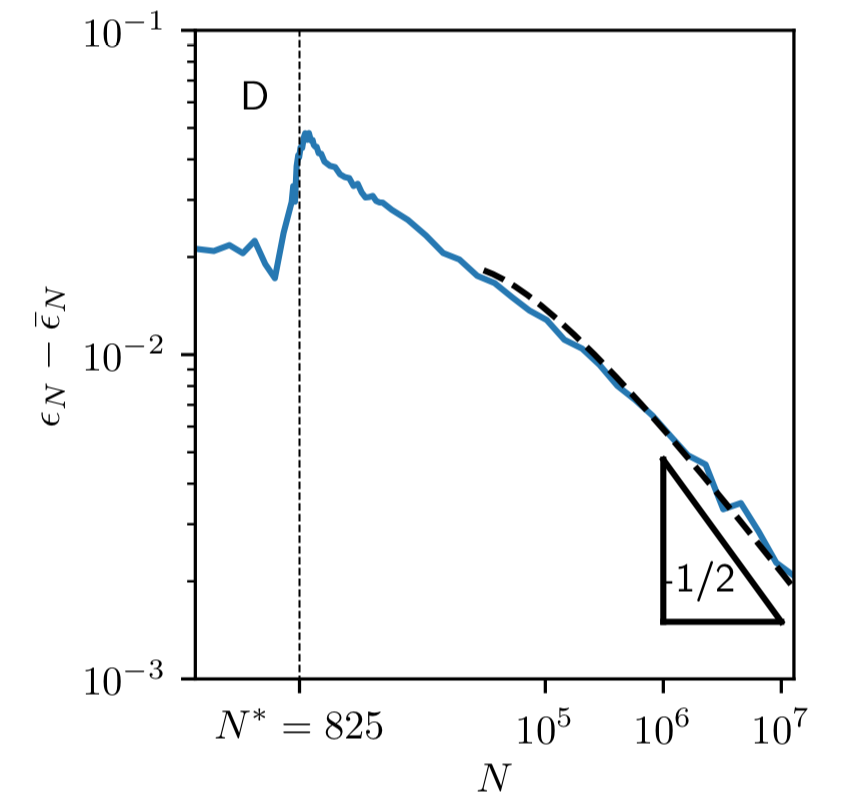
Scaling argument!
Geiger et al. '19 - arXiv:1901.01608
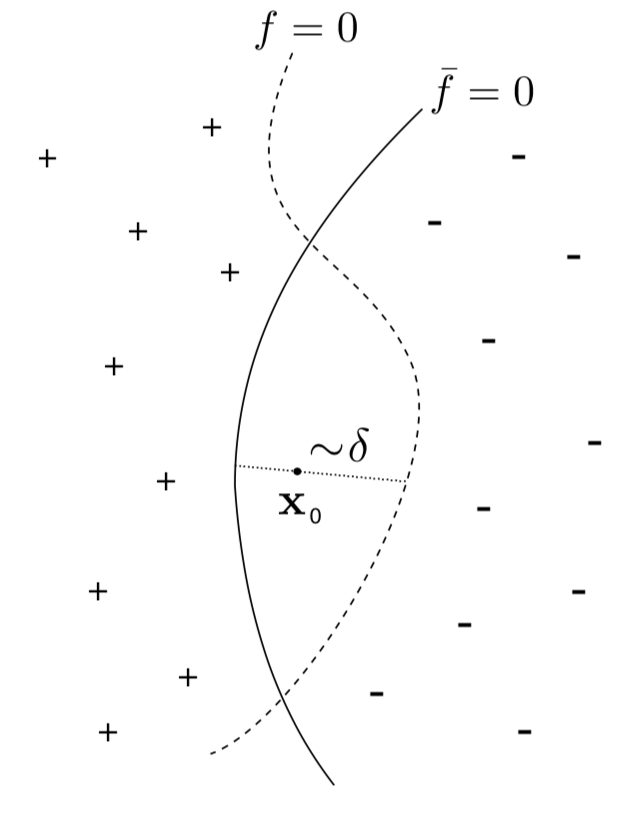
decision boundaries:
Smoothness of test error as function of decision boundary + symmetry:
\left\langle\epsilon_N\right\rangle - \bar\epsilon_N \sim |\!|f_N - \bar f_N|\!|^2 \sim N^{-\frac12}
normal average
ensemble average
Infinitely-wide networks: Initialization
Neal '96; Williams '98; Lee et al '18; Schoenholz et al. '16
- Weights: each initialized as \(W_\mu\sim {\color{red}h}^{-\frac12}\mathcal{N}(0,1)\)
- Neurons sum \(\color{red}h\) signals of order \({\color{red}h}^{-\frac12}\) \(\longrightarrow\) Central Limit Theorem
- Output function becomes a Gaussian Random Field
width \(\color{red}h\)
\(f(\mathbf{x};\mathbf{W})\)
input dim \(\color{red}d\)
\(W^{(1)}\sim d^{-\frac12}\mathcal{N}(0,1)\)
as \(h\to\infty\)
\(W_\mu\)
Infinitely-wide networks: Learning
Jacot et al. '18
- For small width \(h\): \(\nabla_{\mathbf{W}}f\) evolves during training
- For large width hh\(h\): \(\nabla_{\mathbf{W}}f\) is constant during training
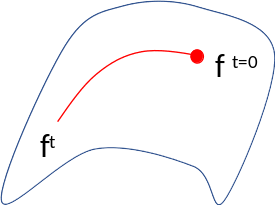
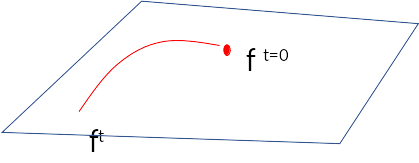
For an input the function lives on a curved manifold
The manifold becomes linear!
Lazy learning:
- weights don't change much:
- enough to change the output \(f\) by \(\sim \mathcal{O}(1)\)!\partial_{\mathbf{W}}
|\!|\mathbf{W}^t - \mathbf{W}^{t=0}|\!|^2 \sim \frac1h
Neural Tangent Kernel
- Gradient descent implies:
\displaystyle \frac{\mathrm{d}}{\mathrm{d}t} f(\mathbf{x}{\color{gray};\mathbf{W}^t}) = \sum_{i=1}^P \ \Theta^t(\mathbf{x},\mathbf{x}_i) \ \ {\color{gray} y_i \ell^\prime(y_i f(\mathbf{x}_i;\mathbf{W}^t))}
\Theta^t(\mathbf{x},\mathbf{x}^\prime) = \nabla_{\mathbf{W}} f(\mathbf{x}{\color{gray};\mathbf{W}^t}) \cdot \nabla_{\mathbf{W}} f(\mathbf{x}^\prime{\color{gray};\mathbf{W}^t})
The formula for the kernel \(\Theta^t\) is useless, unless...
Theorem. (informal)
\lim_{\mathrm{width}\ h\to\infty} \Theta^t(\mathbf{x},\mathbf{x}^\prime) \equiv \Theta_\infty(\mathbf{x},\mathbf{x}^\prime)
Deep learning \(=\) learning with a kernel as \(h\to\infty\)
Jacot et al. '18
\(\phantom{x}\)
\overbrace{\phantom{wwwwwwwwwwwwwwwwwwi}}
convolution with a kernel
\(\phantom{wwwwwwww}\)
Finite \(N\) asymptotics?
Geiger et al. '19 - arXiv:1901.01608;
Hanin and Nica '19;
Dyer and Gur-Ari '19
-
Evolution in time is small:
- Fluctuations are much larger:
Then:
|\!|f_N-\bar f_N|\!|^2 \sim \left(\Delta\Theta^{t=0}\right)^2 \sim N^{-\frac12}
The output function fluctuates similarly to the kernel
\(\Delta\Theta^{t=0} \sim 1/\sqrt{h} \sim N^{-\frac14}\)
at \(t=0\)
\(|\!|\Theta^t - \Theta^{t=0}|\!|_F \sim 1/h \sim N^{-\frac12}\)
\displaystyle f(\mathbf{x}{\color{gray};\mathbf{W}^t}) = \int \mathrm{d}t \sum_{i=1}^P \ \Theta^t(\mathbf{x},\mathbf{x}_i) \ \ {\color{gray} y_i \ell^\prime(y_i f(\mathbf{x}_i;\mathbf{W}^t))}
Conclusion
1. Can networks fit all the \(\color{red}P\) training data?
-
Yes, deep networks fit all data if \(N>N^*\ \longrightarrow\) jamming transition
-
Initialization induces fluctuations in output that increase test error
- No overfitting: error keeps decreasing past \(N^*\) because fluctuations diminish
check Geiger et al. '19 - arXiv:1906.08034 for more!
check Spigler et al. '19 - arXiv:1905.10843 !
2. Can networks overfit? Can \(\color{red}N\) be too large?
3. How does the test error scale with \(\color{red}P\)?
\(\to\) Long term goal: how to choose \(\color{red}N\)?
(tentative) Right after jamming, and do ensemble averaging!
Loss Landscape and Performance in Deep Learning
By Stefano Spigler
Loss Landscape and Performance in Deep Learning
Talk given in ICTS, Bangalore, January 2020




