Learning From Out-of-Distribution Data in Robotics
Feb 3, 2026
Adam Wei


Open-X
Learning Algorithm
In-Distribution Data
Policy
\(\pi(a | o, l)\)
What are principled algorithms for learning from out-of-distribution data sources?
simulation


Colab w/ Giannis Daras
Our approach: Ambient Diffusion Policy
\(p^{clean}\)
\(p^{corrupt}\)
Out-of-Distribution Data
Diffusion Policy
\(\sigma=0\)
\(\sigma=1\)
"Clean" Data
For all \(\sigma \in [0,1]\): train \(h_\theta(A_\sigma, O, \sigma) \approx \mathbb{E}[A_0 \mid A_\sigma, O]\)
Co-train
\(\sigma=0\)
\(\sigma=1\)
"Corrupt" Data
"Clean" Data
Policy learns to sample from a mixture of \(p^{clean}\) and \(p^{corrupt}\)
For all \(\sigma \in [0,1]\): train \(h_\theta(A_\sigma, O, \sigma) \approx \mathbb{E}[A_0 \mid A_\sigma, O]\)
Ambient
\(\sigma=0\)
\(\sigma=1\)
\(\sigma_{min}\)
\(\sigma > \sigma_{min}\)
"Clean" Data
\(p^{clean}_\sigma\) \(\not\approx\) \(p^{corrupt}_\sigma\)
\(p^{clean}_\sigma\) \(\approx\) \(p^{corrupt}_\sigma\)
Consequence of the data processing inequality
For all \(\sigma \in [0,1]\): train \(h_\theta(A_\sigma, O, \sigma) \approx \mathbb{E}[A_0 \mid A_\sigma, O]\)
Ambient
\(\sigma=0\)
\(\sigma=1\)
\(\sigma_{min}\)
\(\sigma > \sigma_{min}\)
"Clean" Data
At low noise levels, action denoising only depends on local actions
For all \(\sigma \in [0,1]\): train \(h_\theta(A_\sigma, O, \sigma) \approx \mathbb{E}[A_0 \mid A_\sigma, O]\)
\(\sigma \leq \sigma_{max}\)
\(\sigma_{max}\)
"Locality"
\(p^{clean}_\sigma\) \(\approx\) \(p^{corrupt}_\sigma\)
Co-train:
Noisy Teleop
Sim2real Gap
Task Mismatch
Ambient:
91%, high jerk
98%, low jerk
93.5%
84.5%
22.7%
93.3%
\(p^{clean}\)
\(p^{corrupt}\)
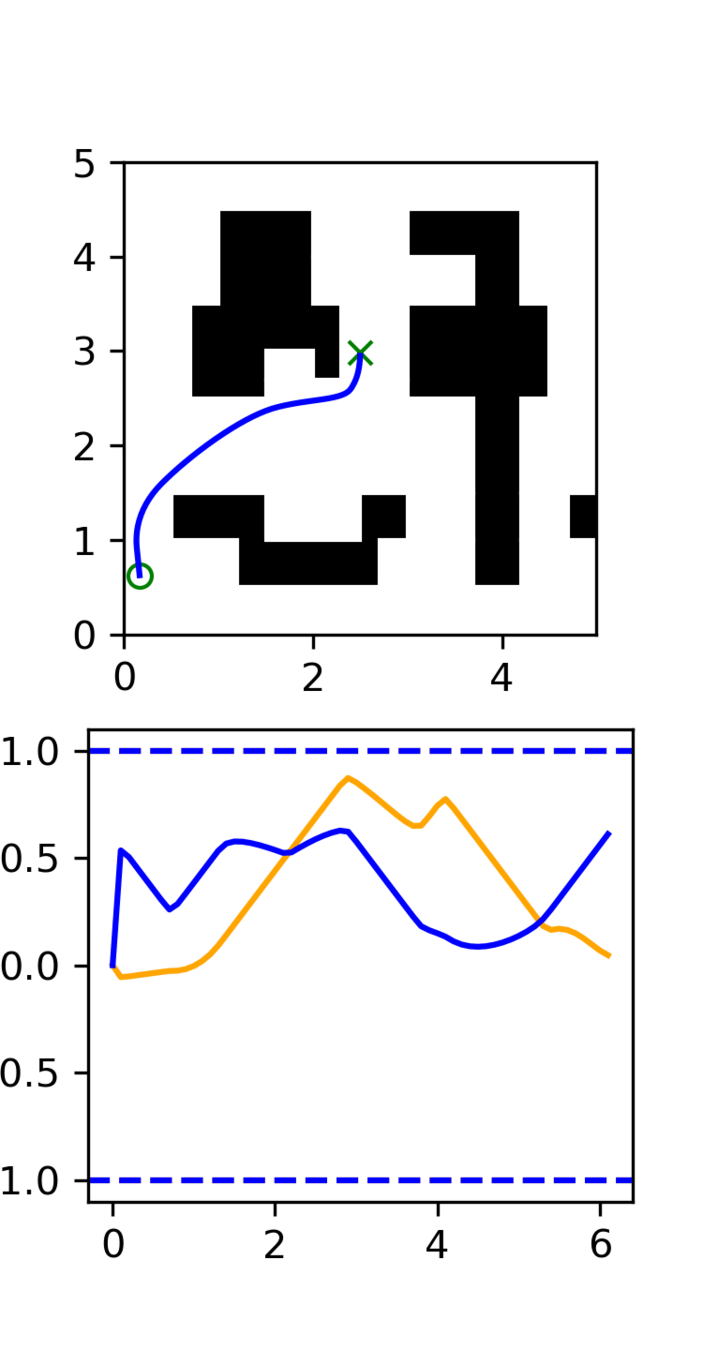
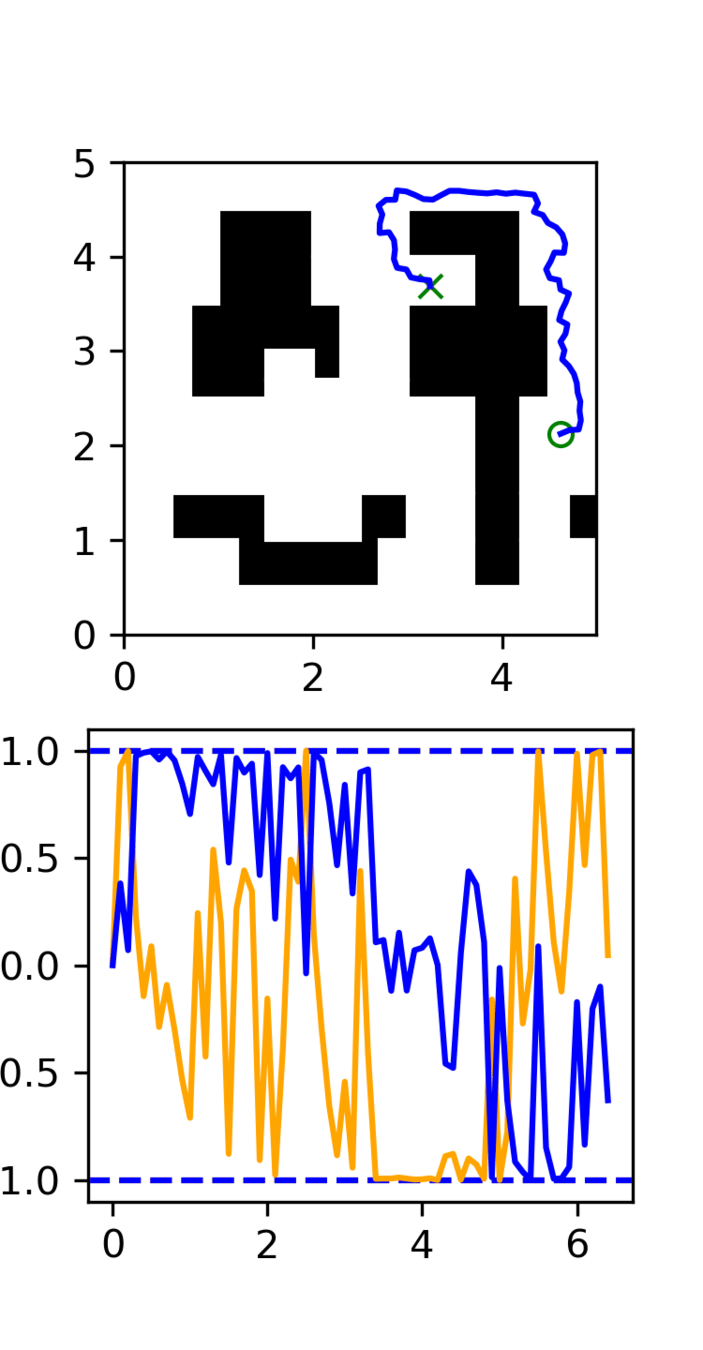
Smooth (GCS)
Non-smooth (RRT)
Sim data
"Real" data
Incorrect logic
Sorts the blocks
Ambient + Locality
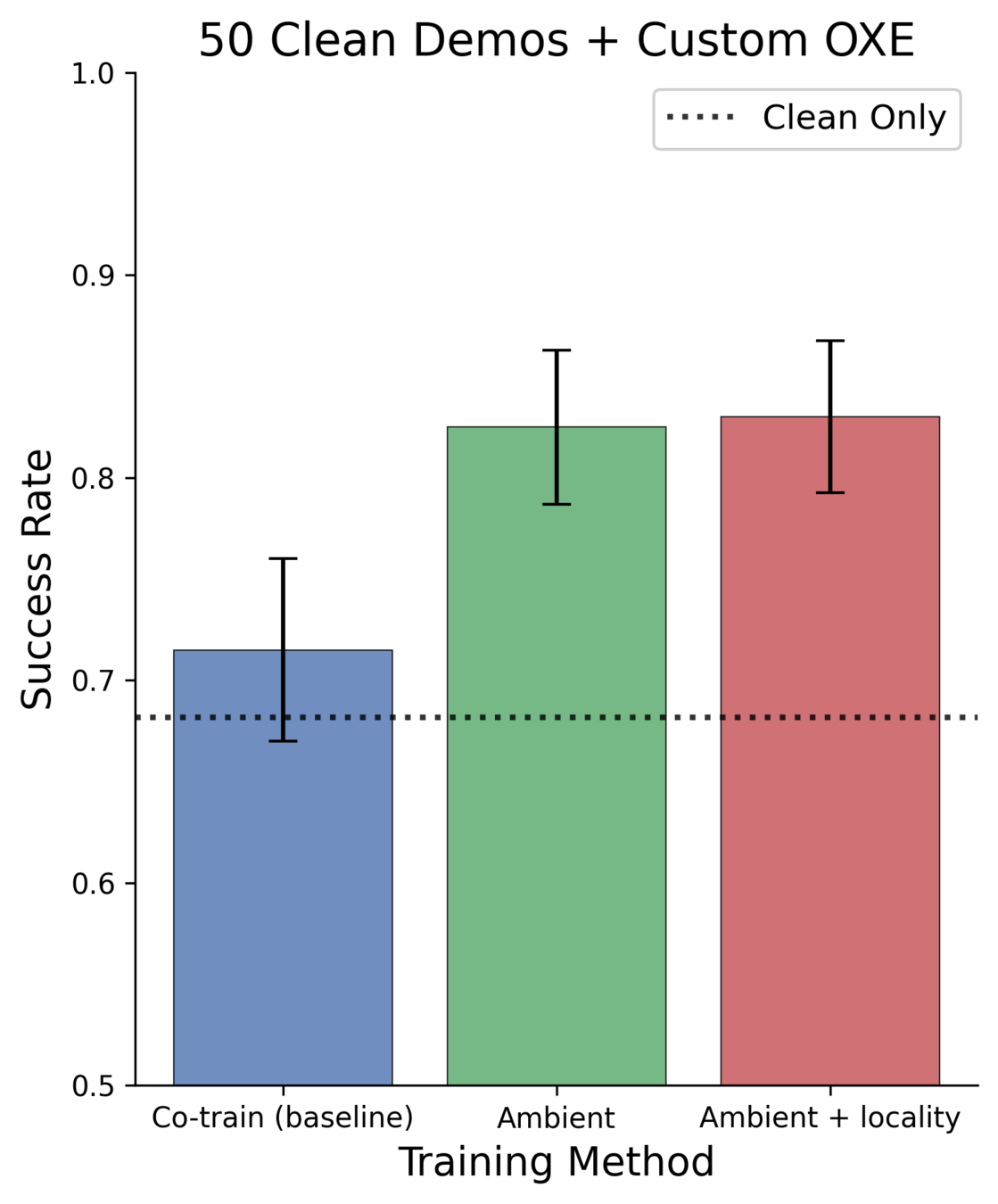
Scaling to Real-World Datasets
Goal: move objects from the table into the drawer
\(\mathcal{D}_{clean}\): 50 in-distribution demos
\(\mathcal{D}_{corrupt}\): Open-X Embodiment
Can we learn from unstructure distribution shifts in large real-world datasets?
Open-X
- cross-embodied
- diff. teleoperators
- sim data!
- mislabeled data
- diff tasks, environments, camera
OpenX Results
More baselines, ablations, dataset combinations, tasks...
...see our upcoming paper :)
Applications
- Sim2real gaps
- Noisy/low-quality teleop
- Task-level mismatch
- Changes in low-level controller
- Embodiment gap
- Camera models, poses, etc
- Different environment, objects, etc
Ambient can be used to learn from any distribution shift in robotics
In-Distribution Data
Open-X
simulation
Out-of-Distribution Data
Applications
- Sim2real gaps
- Noisy/low-quality teleop
- Task-level mismatch
- Changes in low-level controller
- Embodiment gap
- Camera models, poses, etc
- Different environment, objects, etc
Ambient can be used to learn from any distribution shift in robotics
In-Distribution Data
Open-X
simulation
Out-of-Distribution Data
Theory Of Diffusion: On-going Work
1. Ambient Diffusion
2. Long-context policies
3. Tilting diffusion models with reward models
4. Learning from heterogeneous data sources
5. Casuality-informed learning
Amazon Theory Of Diffusion 04/03/26
By weiadam



