GCS + Behavior Cloning
Amazon Presentation
February 22nd 2024
Adam Wei
Behavior Cloning
Behavior Cloning
Tesla
1X
If we have enough data... is robotics (mostly) solved?
1. How can we scale up data collection?
2. Is scaling all we need?
Scaling Up Data Collection
Takeaway: real-world data is extremely valuable, but hard to scale

Teleoperation
- ex. Tesla, 1X, TRI, etc
Text
Open X-Embodiment:
- 1M+ episodes across 22 embodiments and 500+ tasks
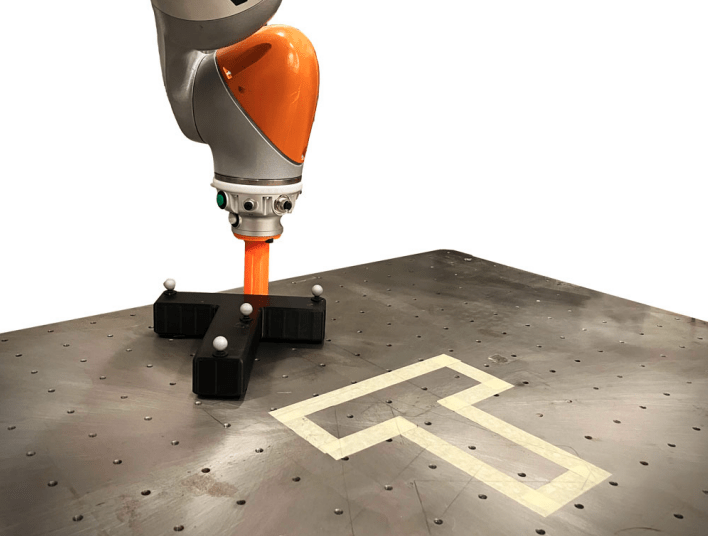
Simulation For Data Generation
Goal: learn a useful representation of physics in simulation; then transfer to real




Policy
Training
Data
Trajectory Generation
GCS + simulation can be a general recipe for scaling up data collection
Is Scale All We Need?
How much extra "performance" are we getting for every new datapoint?
- Generate data at scale using GCS (or other model-based planners) directly in simulation
- Explore the scaling laws and generalization abilities of diffusion policies...
Next Steps...
Transferring to the real-world:
- Accurate simulation
- Visual sim2real (finetuning, domain randomization, photo-realistic renderings, etc)
Exploring the scaling laws of Diffusion Policy:
- Generate data at scale in simulation and explore scaling
GCS + Imitation Learning: Amazon Presentation
By weiadam



