





David Lu
Software Developer
Yung-Sheng Lu
OCT 31, 2017
@NCTU-CS
Communication Systems and Networks (COMSNETS) '17
Adrian Loch, Arash Asadi, Gek Hong Sim, Joerg Widmer, Matthias Hollick
Scenario
The contact time during which a mobile node is in range of a fixed road side unit (RSU) is short.
When transmitting a large amount of information, short contact times become problematic.
Problem
Can the high throughput of mm-Wave make up for the reduction in the contact time?
Solution
Analyze the trade-off and design a first-of-its-kind practical mm-Wave vehicular testbed to evaluate the resulting performance.
Millimeter-wave (mm-Wave)
Achieve multi-gigabit-per-second performance
Successfully combined with other vehicular systems
Extremely high attentuation
Uses directional antennas to overcome
Highly mobile scenarios
How can transceivers perform efficient beam-steering at vehicular speeds such that they always reach each other?
Where shall mm-Wave antennas be located on cars?
Place the antenna on a pole on top of the car but stongly disagree with aethetic considerations
How wide shall the bandwidth of the mm-Wave antennas on a car be?
How much data can transceivers enchange in a mobile scenario?
First-of-its-kind mm-Wave vehicular testbed
Operating in the 60 GHz band
Consider the road side units (RSUs) to transmit data to vehicles
The data includes content of large volumes.
Propose an approach that eliminates the use of beem-steering by leveraging the characteristics of vehicular communications.
Contact time
The time during which the RSU and the in-car-unit (ICU) can exchange data.
Directly related to the speed of the car and the distance that the car travels within the beam of the transmitter
Contact distance
Infrastructure
Transmitter: RSU
Receiver: ICU
Symbols
Transmission direction:
Transmit beamwidth at the RSU:
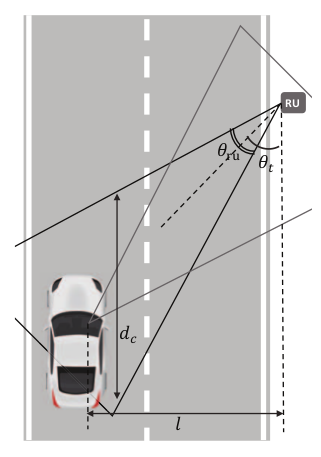
Three RSU Cases
At the road side
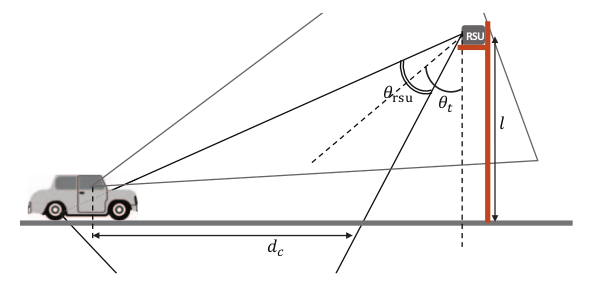
On top of a bridge
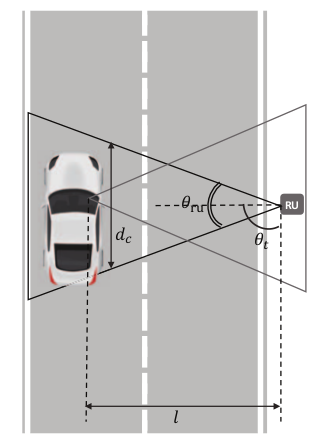
Within a roundabout
Fig.: At the road side.
Fig.: On top of a bridge.
Fig.: Within a roundabout.
The contact distance between the RSU and the ICU
For
For
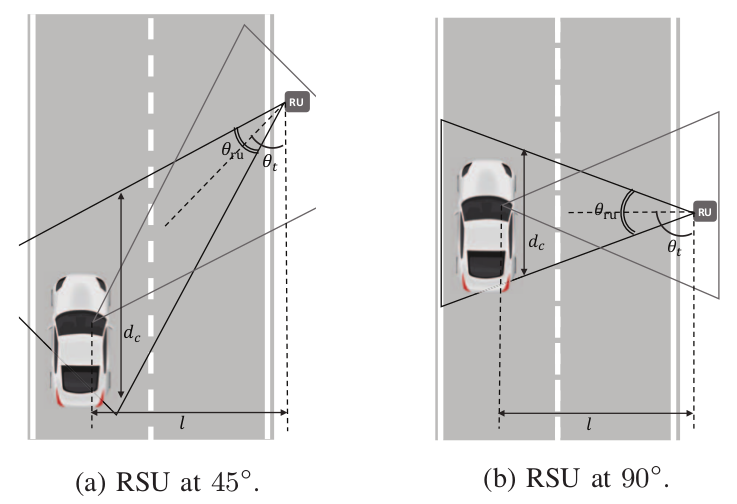
Fig.: RSU at .
contact distance
Transmission direction:
Transmit beam-width at the RSU:
The contact time at which the vehicle is driving
We do not condiser angles .
Let
Let
Fig.: RSU at .
Transmission direction:
Transmit beam-width at the RSU:
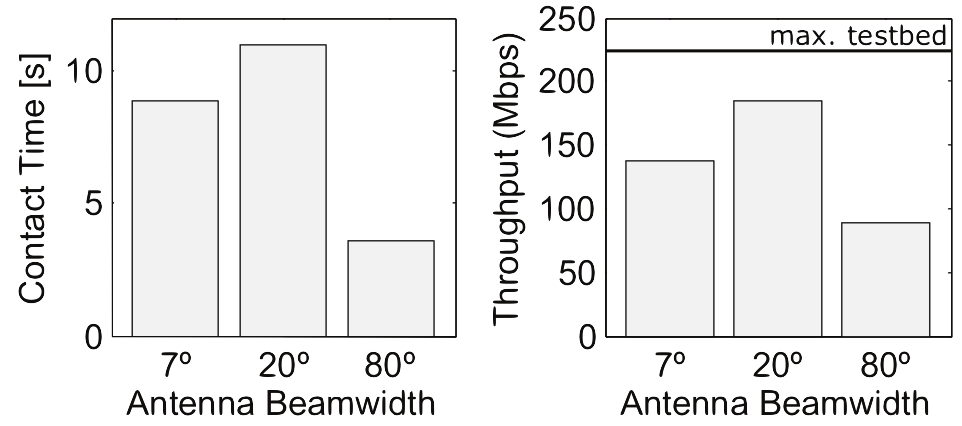
While a wider beamwidth may provide a longer contact time, may also result in lower transmit rates since the antenna gain typically.
Optimal and
Contact time:
Transmission rate:
Transmission direction:
Transmit beam-width at the RSU:
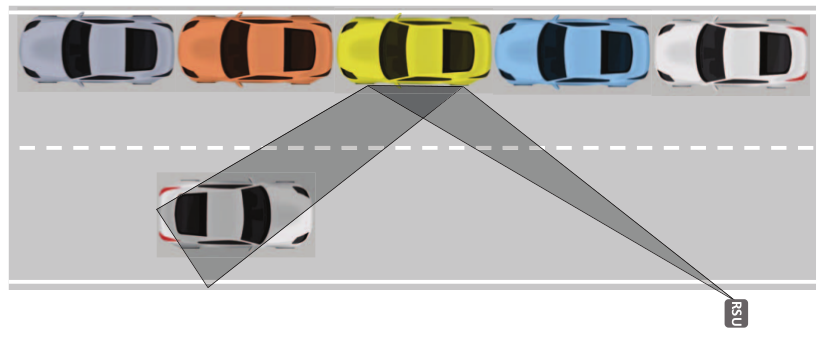
Fig.: Car reflection case. The row of cars are parked cars.
The cars on the road cannot cause blockage.
The signal can receive all of the car from above.
May not hold when a car driving closely behind a large truck.
Large truck
Fig.: RSU located at the top of a bridge.
The cars must slow down when driving in a roundabout.
Increases the contact time
Provides coverage in all directions
To compensate for the low gain of the omnidirectional antenna, the car can use a highly directional receive antenna.
The contact time for given a
roundabout of radius
Contact time:
Transmit beam-width at the RSU:
Environment
RSU
Based on GNU Radio developed at RWTH Aachen
Along with a USRP X310 to generate a stream of 4-QAM modulated data
Sends this data to the external upconverter for transmission in the 60 GHz band
ICU
Carrier-frequency offset (CFO) compensation
Decoding
Metrics
Receive time
Period of time during which the receiver gets packets.
Contact time
Period of time during which the receiver is able to receive correct packets without bit errors.
Others - throughput, BER, PER, SNR
RSU Setup
Desktop PC
USRP X310
SiversIMA FC1005V/00 60 GHz upconverter
Horn antenna or omni-directional antenna
ICU Setup - Same elements as the RSU
Location
Temporarily installed the RSU at multiple locations in the city of Leganés, Spain.
All experiments were carried out under real traffic conditions at the beginning of August 2016.
Points the antenna of the RSU at and the ICU at
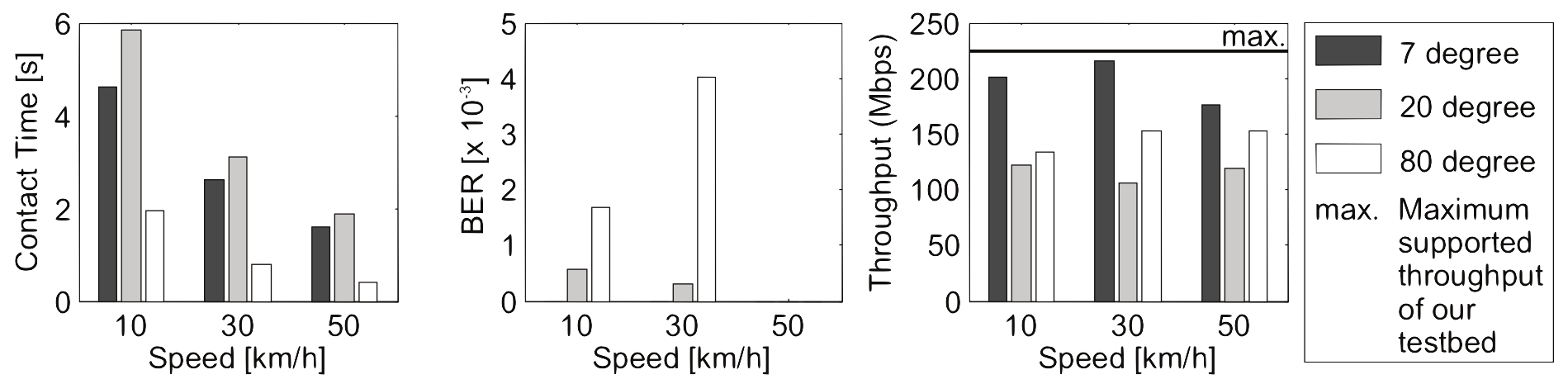
The faster the car,
the less time the transmit and the receive beams are aligned
the less packets are received
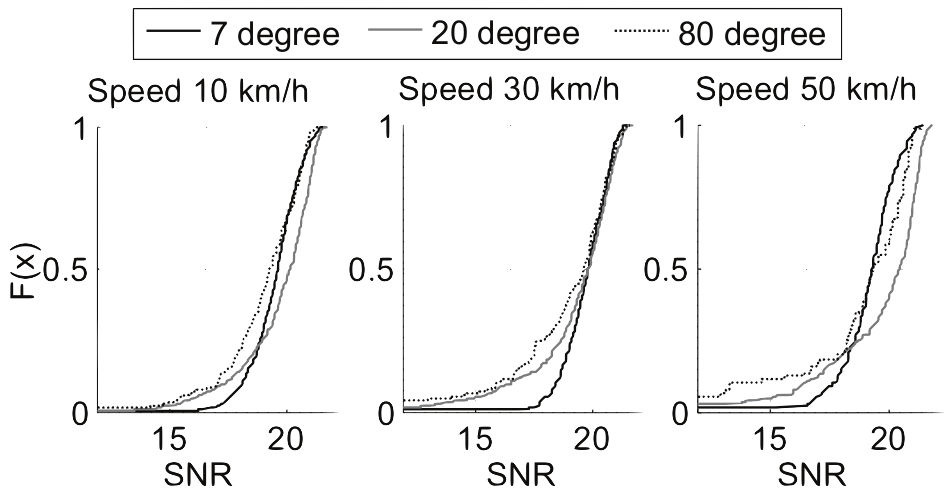
the lower the probability that we observe bit errors
Related to the antenna gain
The wider the beam width, the larger the variance of SNRs.
Fig.: SNR distribution.
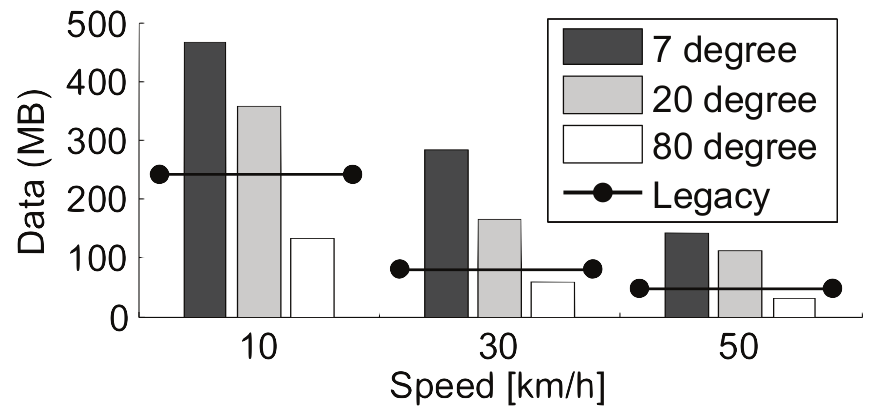
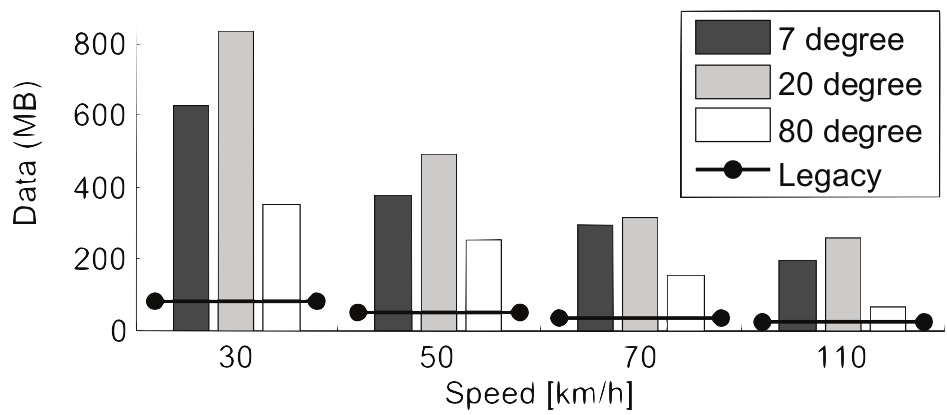
Compares with lagacy 802.11p-like WiFi
Assumes a circular range of 100 m and a fixed rate of 27 Mbps
Achieves higher throughput only holds for narrow beam width
Only holds for narrow beam
Fig.: 60 GHz vs. legacy WiFi.
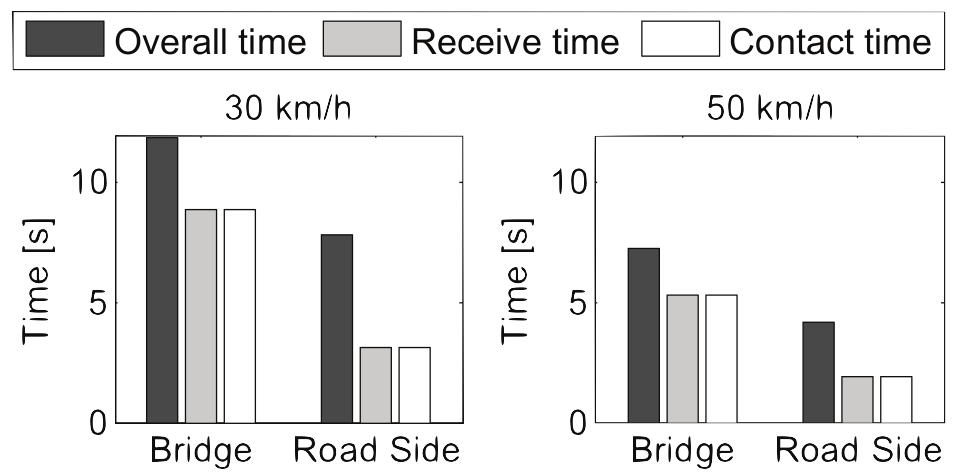
Achieves higher contact times in bridge scenario compared to the road side case
Fig.: Communication times.
Achieves higher contact times in bridge scenario compared to the road side case
Fig.: In the Bridge Scenario.
Fig.: In Road Side Scenario.
The increase in contact
time when switching angles.
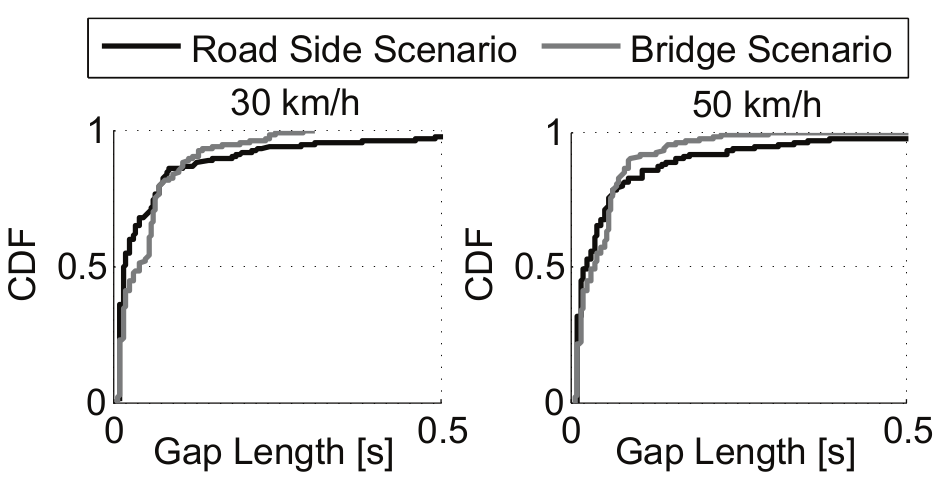
Communication gaps occur when antennas are temporarily misaligned due to, e.g., bump.
Fig.: Communication gaps.
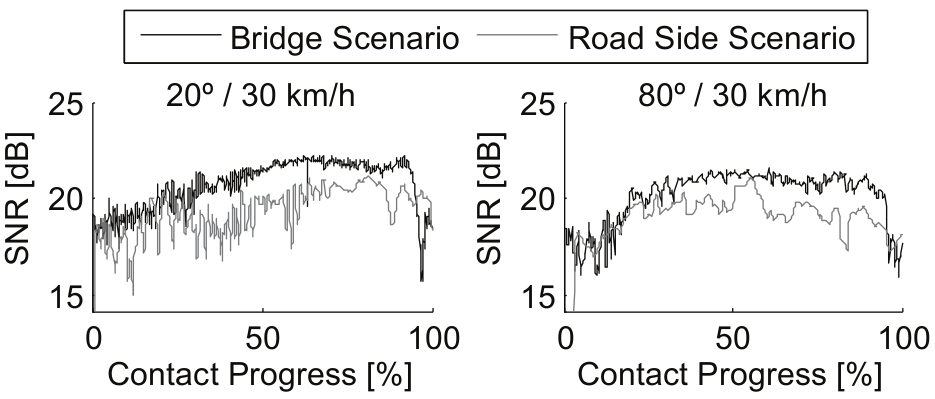
The contact progress reflects the normalized contact time.
The bridge case is more stable than the road with bumps.
Fig.: SNR fluctuations.
Shakiness has less influence.
Considers an RSU placed at the center of a roundabout
The omnidirectional antenna has a peak of its radiation pattern when the car is driving through a roundabout.
30 km/h
Path loss
Path loss
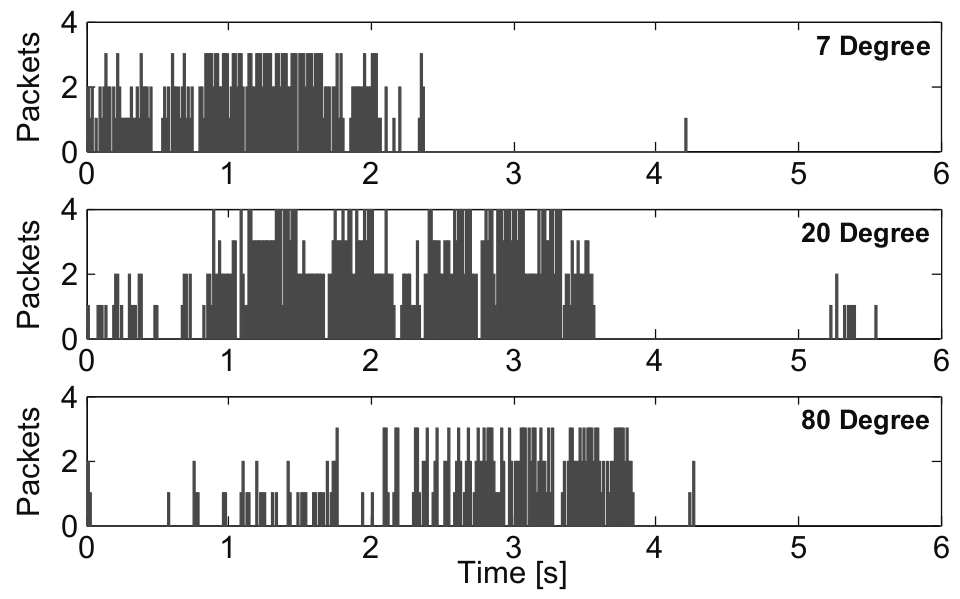
Fig.: Packet arriving at the ICU via a car reflection.
The length of the main burst increases with the beam width.
The reflected path becomes wider.
20 km/h
Isolated packets
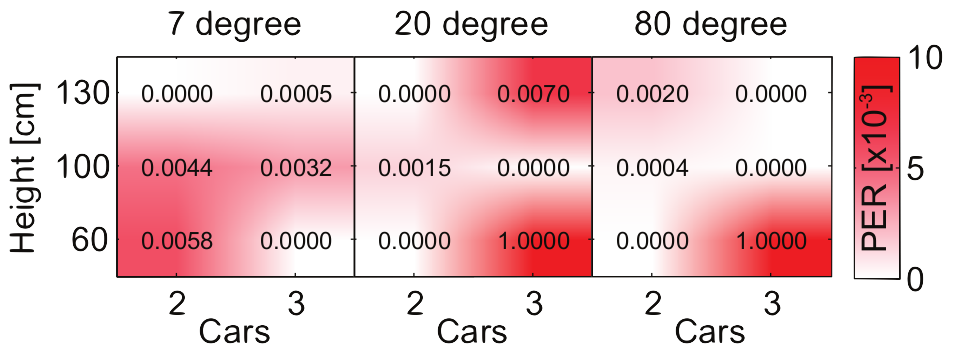
Higher heights results in lower PER.
Wider beam widths tend to yield better results.
The transmission through parallel cars is feasible.
Easily result in link loss
Fig.: PER for transimission through cars multiple heights.
Height
The road geometry and the arrival direction of cars are known in vehicular scenarios.
Fixed beam-steering and beam width angles
Builds a first-of-its-kind SDR-based practical vehicular testbed
Enables 60 GHz packet-level transmissions
Our approach is feasible and yields significant throughput gains compared to legacy 802.11p-based systems.
A simple yet effective approach to select a fixed antenna steering for multiple RSU scenarios
at the road side, on a bridge, and in a roundabout
The impact of antenna beam width in the above RSU scenarios, and analytically optimize it
The impact of reflectors in vehicular scenarios
the walls of buildings or cars parked nearby
J. Blumenstein, T. Mikulasek, A. Prokes, T. Zemen, and C. Mecklen-brauker, "INtra-Vehicular Path Loss Comparison of UWB Channel for 3-11 GHz and 55-65 GHz," IEEE IXUWB, 2015.
E. Ben-Dor, T. S. Rappaport, Y. Qiao, and S. J. Lauffenburger, "Millimeter-Wave 60 GHz Outdoor and Vehicle AOA Propagation Measurements Using a Broadband Channel Sounder," IEEE GLOBECOM, 2011.
Y. Kim, H.-Y. Lee, P. Hwang, R. K. Patro, J. Lee, W. Roh, and K. Cheun, "Feasibility of Mobile Cellular Communications at Millimeter Wave Frequency," IEEE Journal of Selected Topics in Signal Processing, 2016.
S. Sur, V. Venkateswaran, X. Zhang, and P. Ramanathan, "60 GHz Indoor Networking Through Flexible Beams: A Link-Level Profiling," ACM SIGMETRICS Performance Evaluation Review, 2015.
By David Lu
20171031 Group Meeting Presentation




