From Shapes to Actions
Andy Zeng
Workshop on 3D Vision and Robotics

\text{sign}(x)
Learning Precise 3D Manipulation from Multiple Uncalibrated Cameras
Akinola et al., ICRA 2020

Image credit: Dmitry Kalashnikov
4-3{x_1}{x_2}-4{x_2}^2+{x_1}{x_2}^3+2{x_2}^4
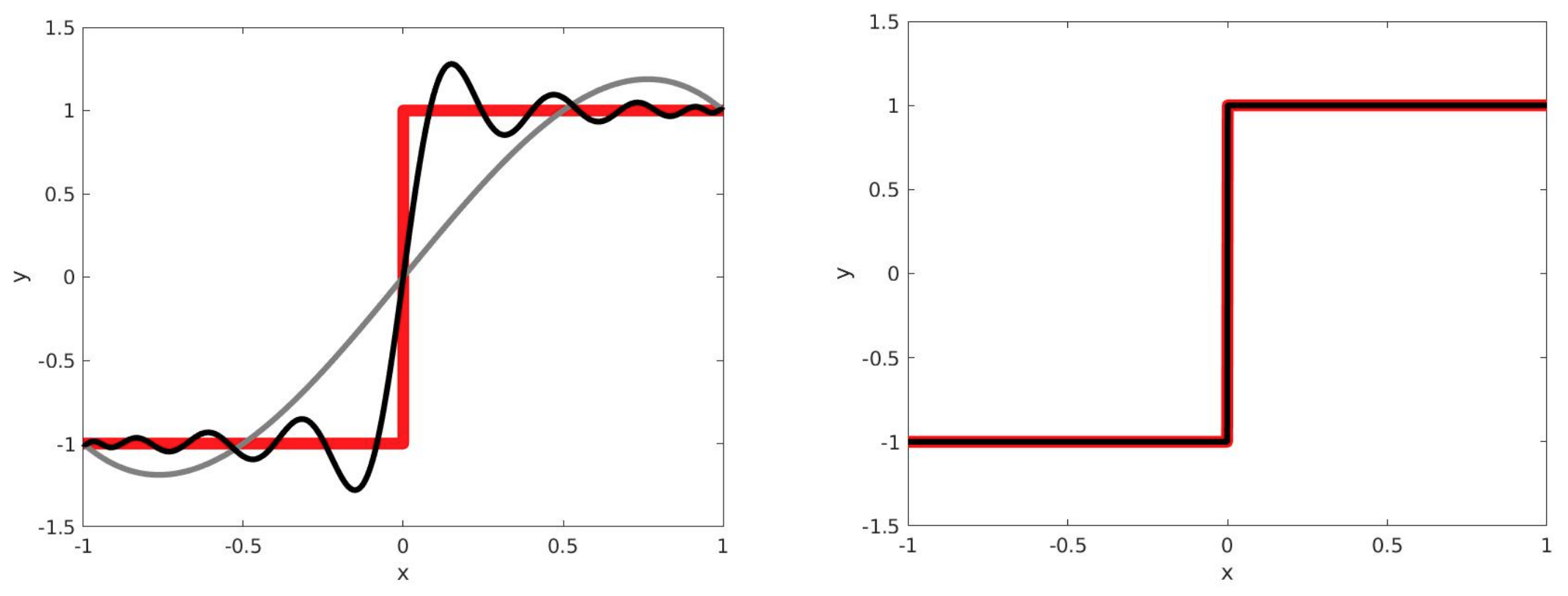
Semi-Algebraic Approximation using Christoffel-Darboux Kernel
Marx et al., Springer 2021
NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
Mildenhall and Srinivasan et al., ECCV 2020


RealSense

Gahan Wilson


"BusyPhone" - a 2020 BusyBoard
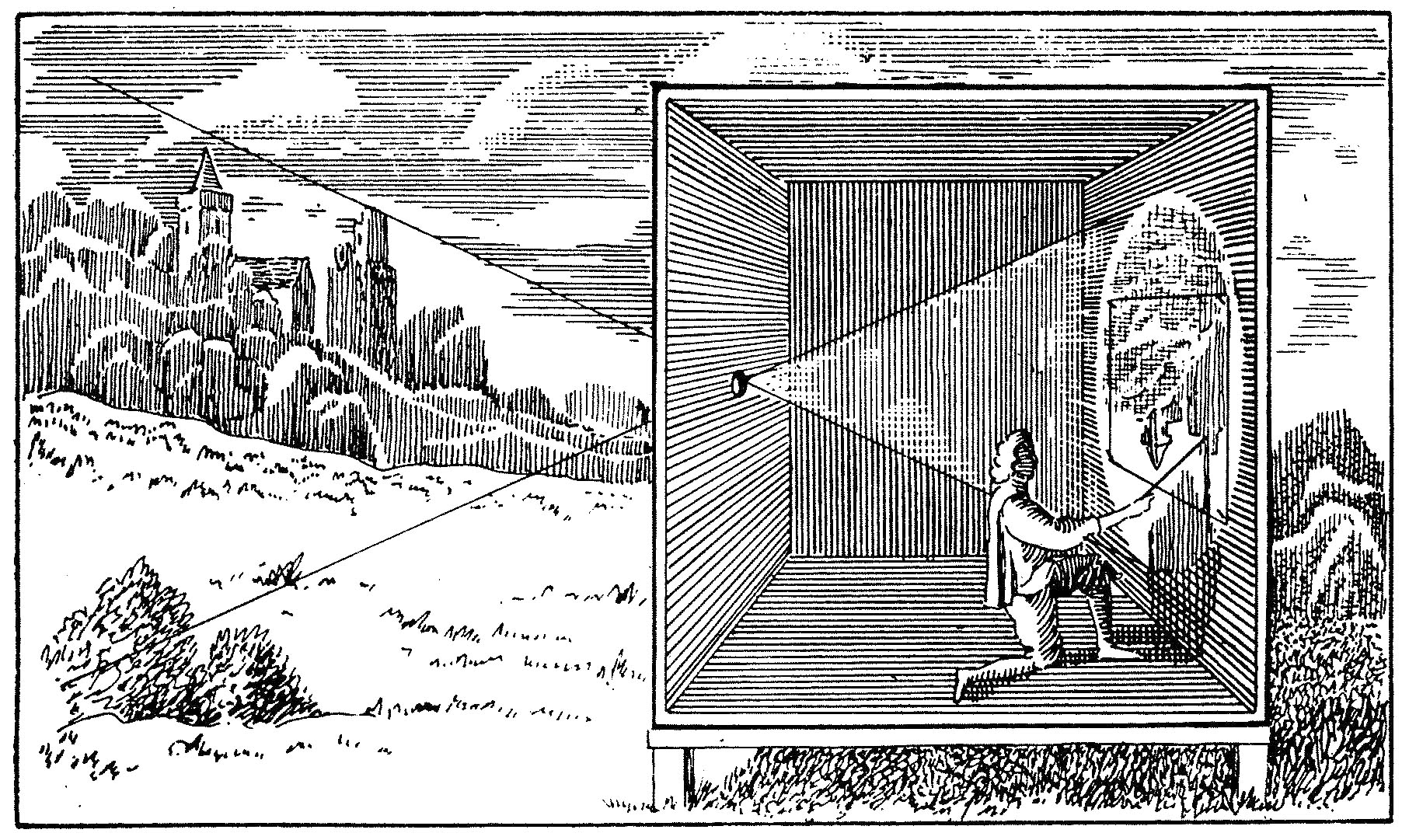
"The Perception of the Visual World"
James J. Gibson (1950)
affordances
the opportunities for action provided by a particular object or environment
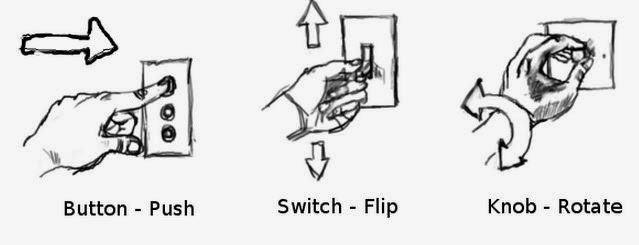

"Affordance in User Interface Design" by Avadh Dwivedi
"Role of Affordances in DT and IoT" by Anant Kadiyala
grasping
lifting
twisting
touching
grasping
grasping
pushing
Shape classification!

Suction
Grasping


RGB-D Data Collection
Fully Convolutional Networks
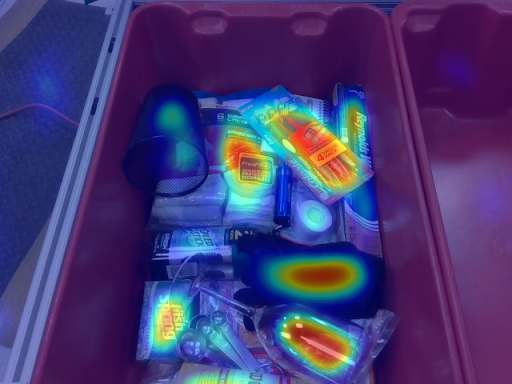
Robotic Pick-and-Place of Novel Objects in Clutter with Multi-Affordance Grasping and Cross-Domain Image Matching
Zeng et al., ICRA 2018, 1st Place Stow Task Amazon Robotics Challenge 2017
A3



Grasping confidence
Throwing velocity
Input RGB-D
TossingBot: Learning to Throw Arbitrary Objects with Residual Physics
Zeng et al., RSS 2019, T-RO 2020, Best Paper Award
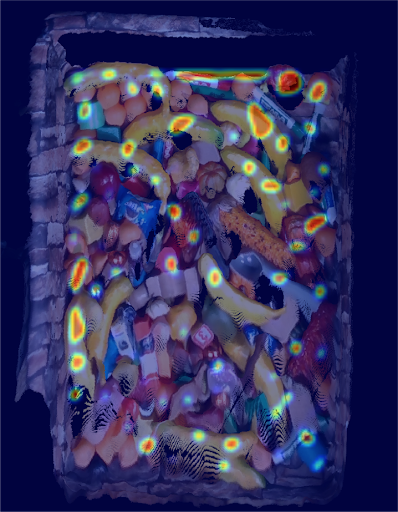
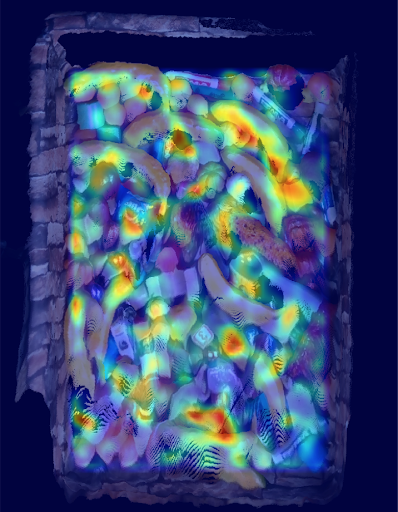
Grasps self-supervised by throws
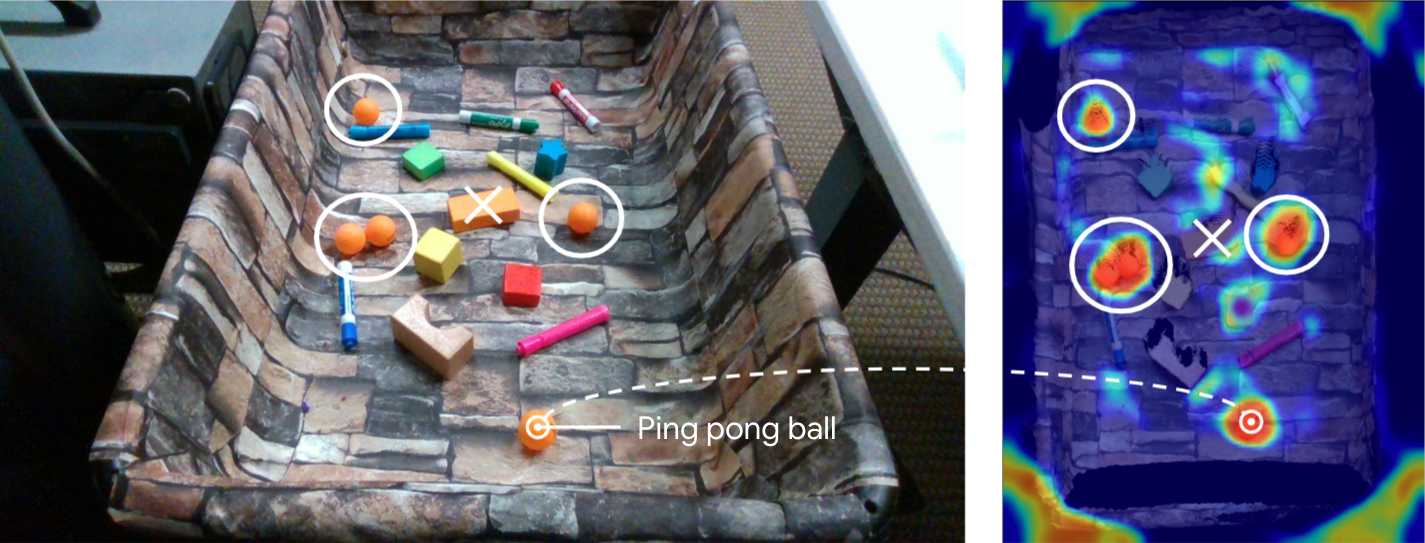
Self-supervised grasping

Perception
Actions
TossingBot: Learning to Throw Arbitrary Objects with Residual Physics
Zeng et al., RSS 2019, T-RO 2020, Best Paper Award
Throwing improves how we see grasps
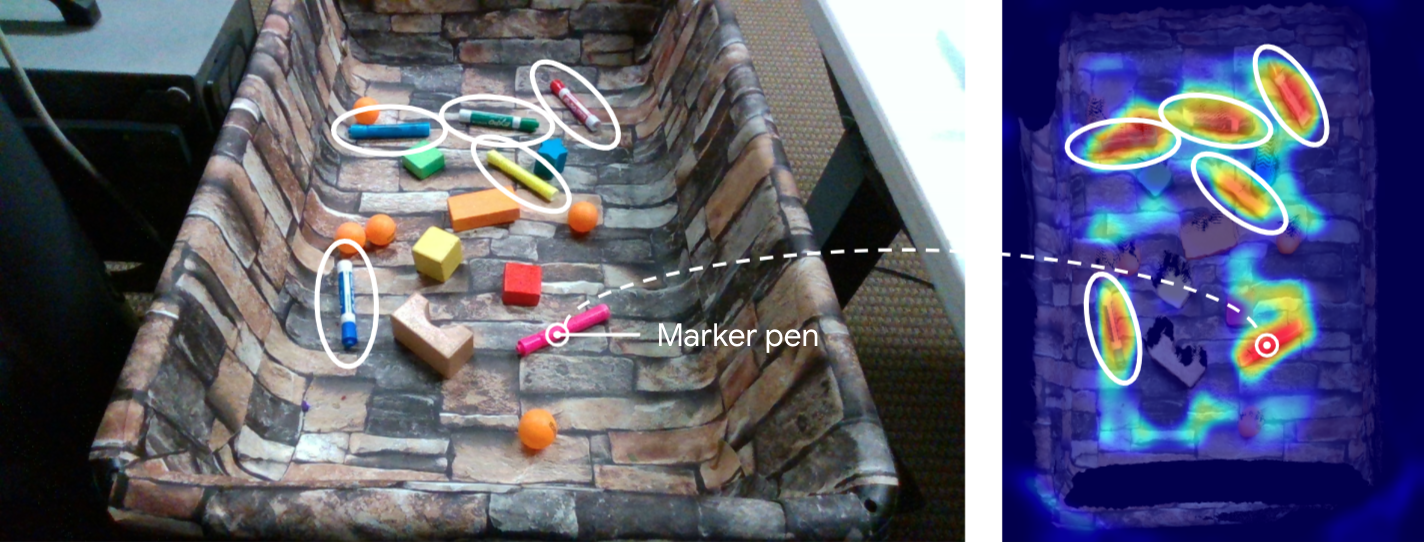
TossingBot: Learning to Throw Arbitrary Objects with Residual Physics
Zeng et al., RSS 2019, T-RO 2020, Best Paper Award
object
end effector
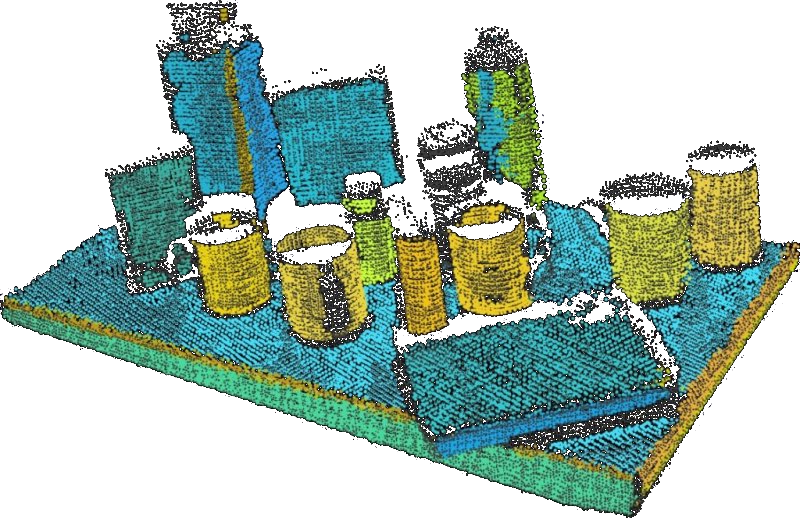
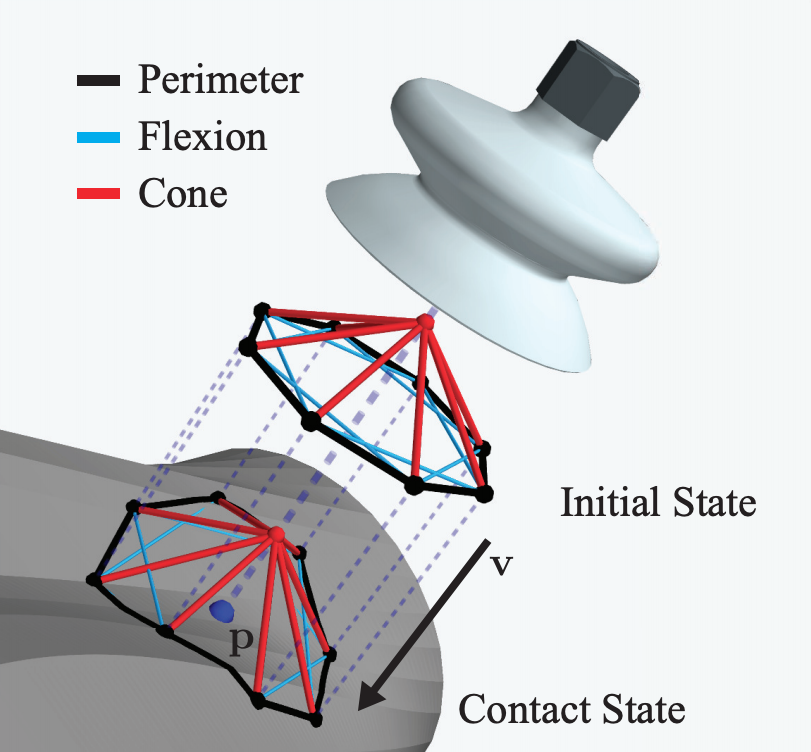
Dex-Net 3.0: Computing Robust Vacuum Suction Grasp Targets in Point Clouds using a New Analytic Model and Deep Learning
Mahler et al., ICRA 2018


Rearrangement: A Challenge for Embodied AI
Batra et al., 2020
object ↔ object?

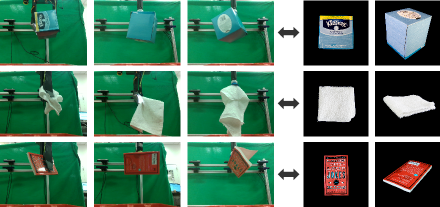
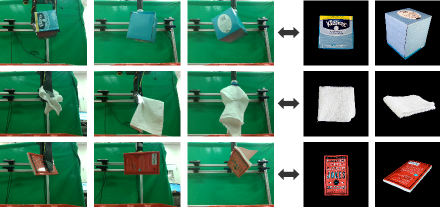
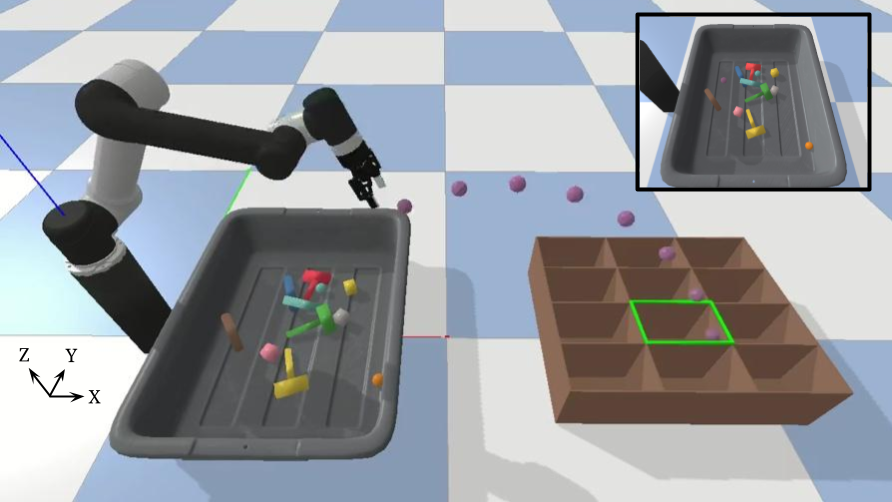
Manipulation → Rearranging Objects (3D Space)
Can we predict these displacements, without object assumptions?
✓
✗
✗
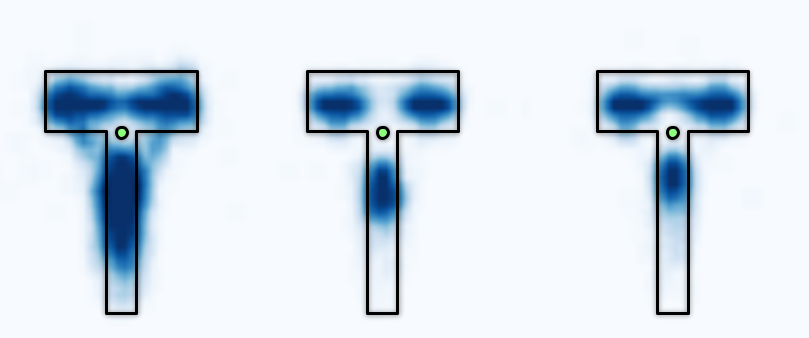
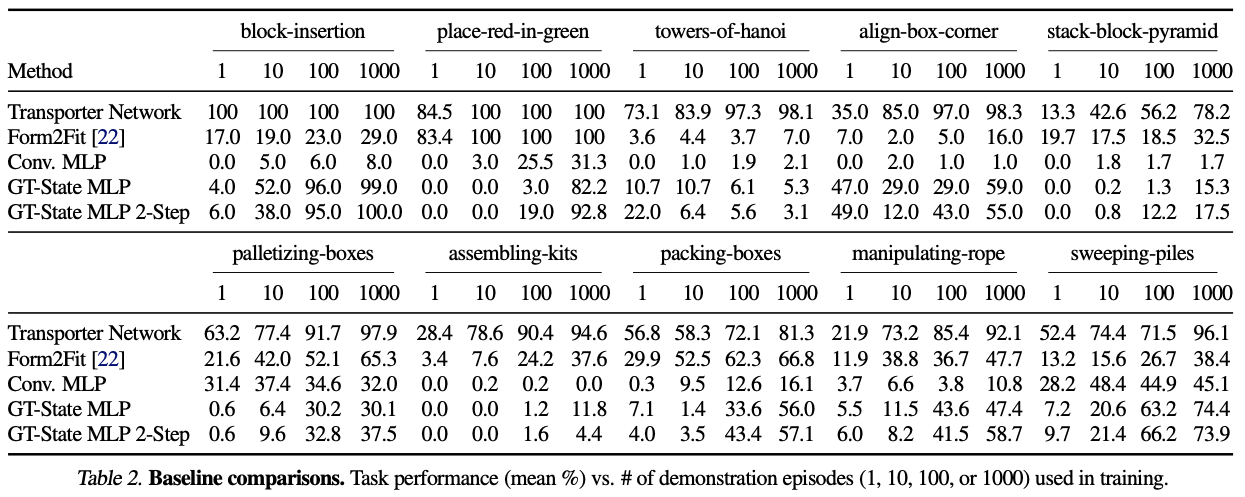
Transporter Networks: Rearranging the Visual World for Robotic Manipulation
Zeng et al., CoRL 2020
Transporter Nets
Form2Fit: Learning Shape Priors for Generalizable Assembly from Disassembly
Kevin Zakka et al., ICRA 2020
- Affordance perception: shapes → actions (e.g. grasping)
- Actions → affordance perception (e.g. TossingBot)
- Relationship between objects → actions (e.g. Transporter Nets)
From Shapes to Actions
Lin Yen-Chen et al., ICRA 2020
Jimmy Wu et al., ICRA 2021
Daniel Seita et al., ICRA 2021
Thank you!
Robotic Pick-and-Place of Novel Objects in Clutter with Multi-Affordance Grasping and Cross-Domain Image Matching
Andy Zeng, Shuran Song, Kuan-Ting Yu, Elliott Donlon, Francois R. Hogan, Maria Bauza, Daolin Ma, Orion Taylor, Melody Liu, Eudald Romo, Nima Fazeli, Ferran Alet, Nikhil Chavan Dafle, Rachel Holladay, Isabella Morona, Prem Qu Nair, Druck Green, Ian Taylor, Weber Liu, Thomas Funkhouser, Alberto Rodriguez
TossingBot: Learning to Throw Arbitrary Objects with Residual Physics
Andy Zeng, Shuran Song, Johnny Lee, Alberto Rodriguez, Thomas Funkhouser
Transporter Networks: Rearranging the Visual World for Robotic Manipulation
Andy Zeng, Pete Florence, Jonathan Tompson, Stefan Welker, Jonathan Chien, Maria Attarian, Travis Armstrong, Ivan Krasin, Dan Duong, Vikas Sindhwani, Johnny Lee
Learning to Rearrange Deformable Cables, Fabrics, and Bags with Goal-Conditioned Transporter Networks
Daniel Seita, Pete Florence, Jonathan Tompson, Erwin Coumans, Vikas Sindhwani, Ken Goldberg, Andy Zeng
Spatial Intention Maps for Multi-Agent Mobile Manipulation
Jimmy Wu, Xingyuan Sun, Andy Zeng, Shuran Song, Szymon Rusinkiewicz, Thomas Funkhouser
Form2Fit: Learning Shape Priors for Generalizable Assembly from Disassembly
Kevin Zakka, Andy Zeng, Johnny Lee, Shuran Song
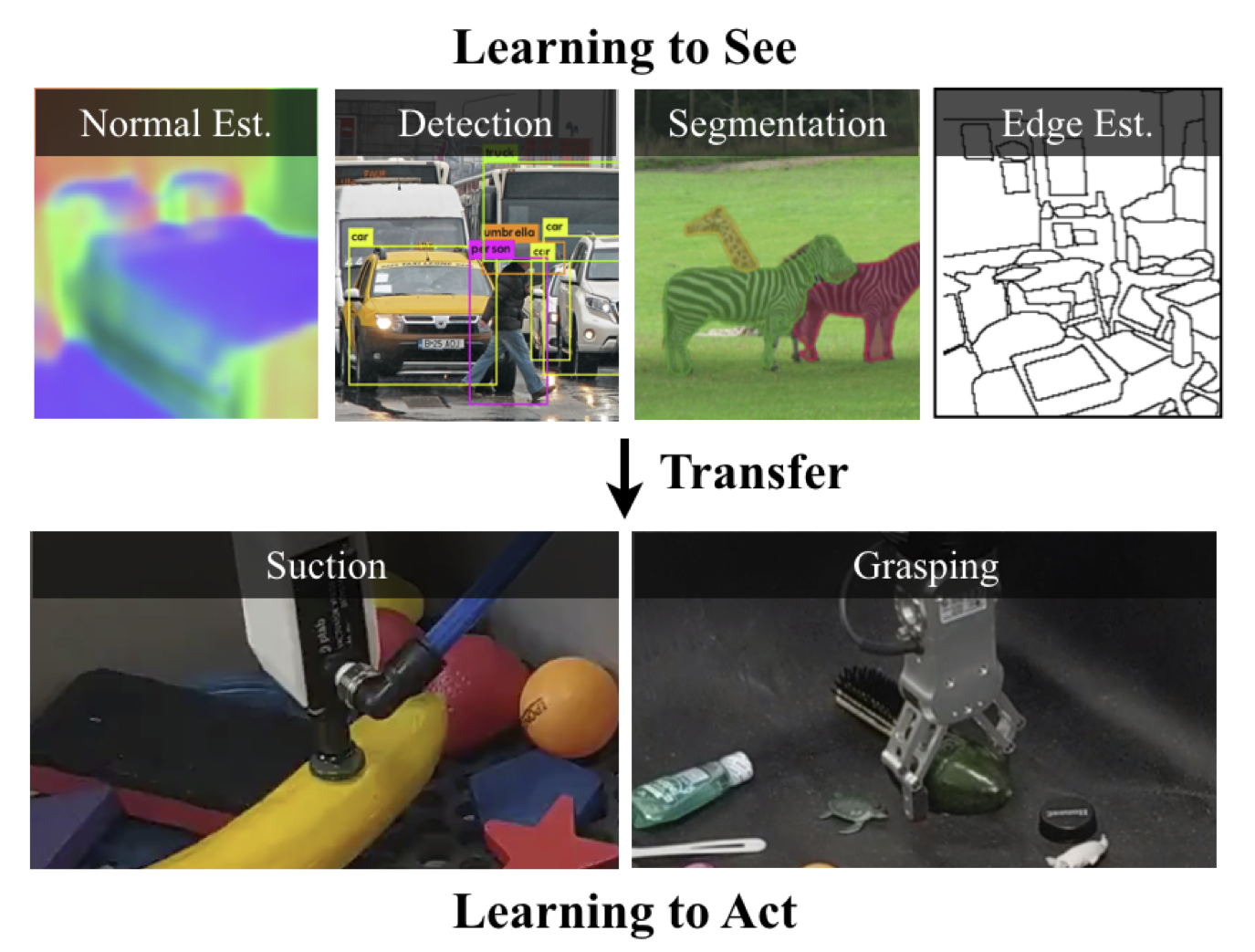
Learning to See before Learning to Act: Visual Pre-training for Manipulation
Lin Yen-Chen, Andy Zeng, Shuran Song, Phillip Isola, Tsung-Yi Lin
2021-CVPR-3DVR
By Andy Zeng



