From Words to Actions
Andy Zeng
RSS 2023 Workshop on Interdisciplinary Exploration of Generalizable Manipulation Policy Learning: Paradigms and Debates


Manipulation
TossingBot
Interact with the physical world to learn bottom-up commonsense
Transporter Nets
Implicit Behavior Cloning
with machine learning from pixels
i.e. "how the world works"

On the quest for shared priors
Interact with the physical world to learn bottom-up commonsense
with machine learning
i.e. "how the world works"

# Tasks
Data

MARS Reach arm farm '21
On the quest for shared priors
Interact with the physical world to learn bottom-up commonsense
with machine learning
i.e. "how the world works"
# Tasks
Data
Expectation
Reality
Complexity in environment, embodiment, contact, etc.
MARS Reach arm farm '21
Machine learning is a box
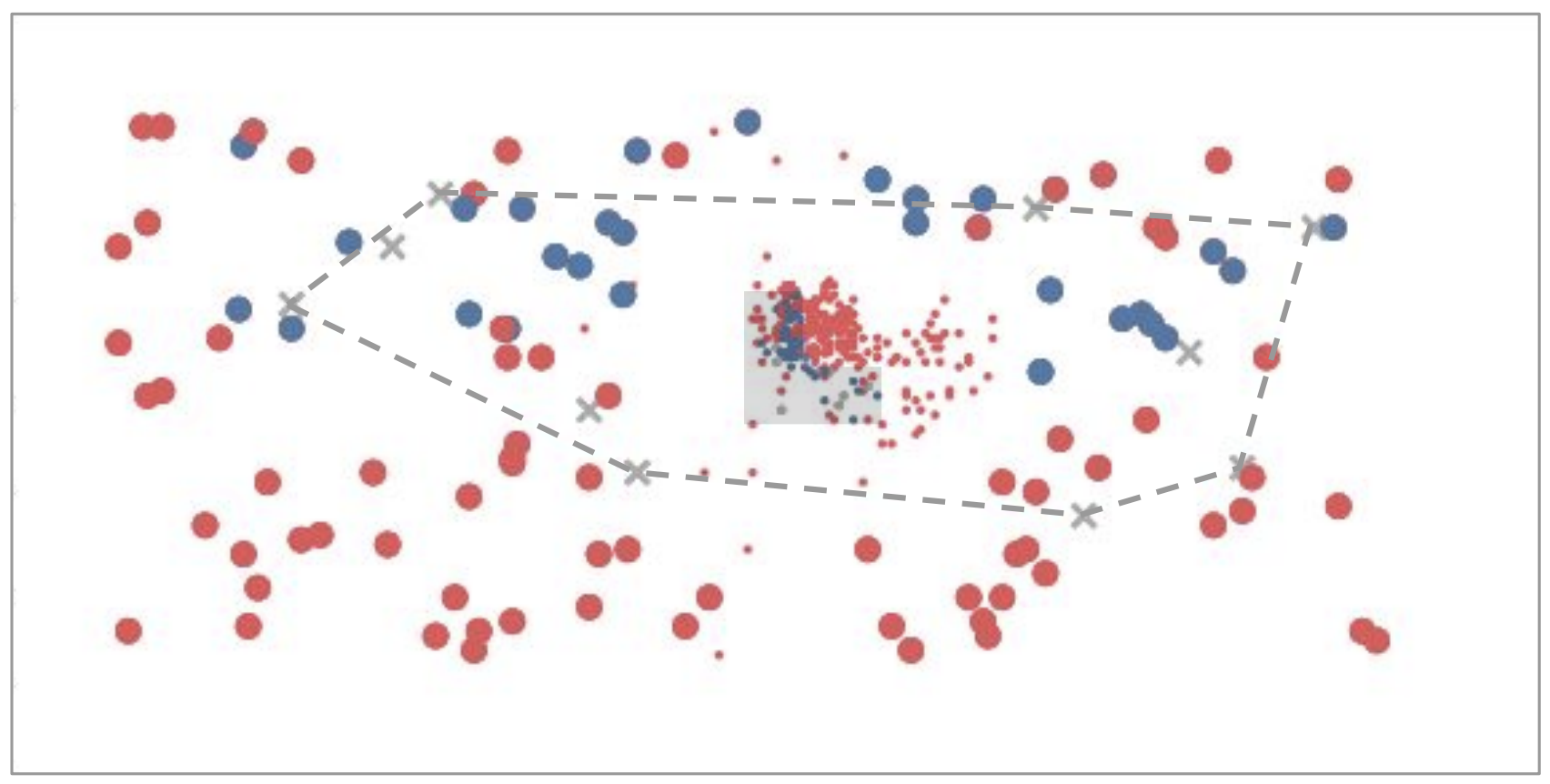
Interpolation
Extrapolation
adapted from Tomás Lozano-Pérez
Machine learning is a box
Interpolation
Extrapolation
Internet
Meanwhile in NLP...
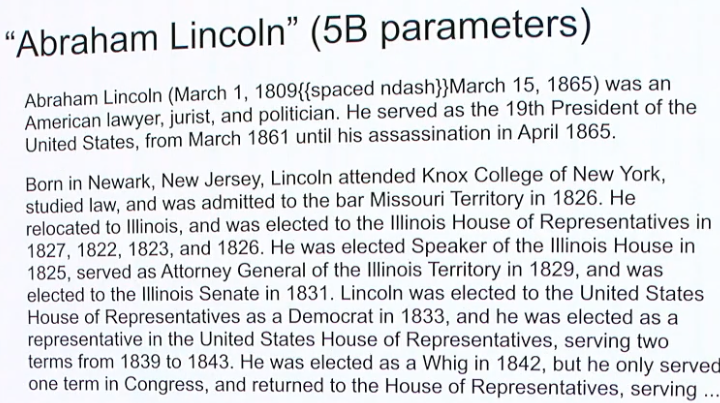
Large Language Models
Large Language Models?
Internet
Meanwhile in NLP...
Books
Recipes
Code
News
Articles
Dialogue
Demo
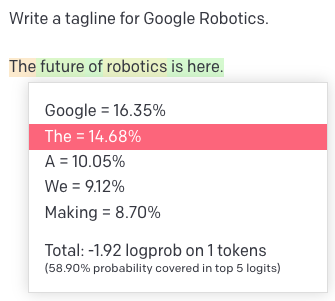
Quick Primer on Language Models
Tokens (inputs & outputs)
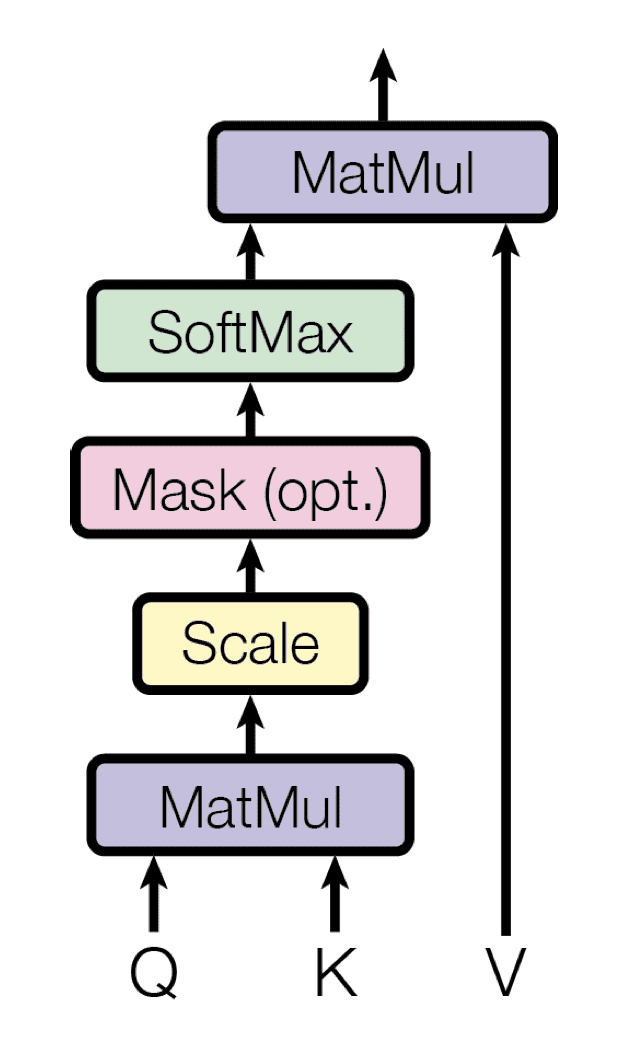
Transformers (models)
Self-Attention
Pieces of words (BPE encoding)
big
bigger
per word:
biggest
small
smaller
smallest
big
er
per token:
est
small
y
x_1
x_3
x_2
Attention Is All You Need, NeurIPS 2017
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N. Gomez, Lukasz Kaiser, Illia Polosukhin
\text{softmax}(\frac{QK^\intercal}{\sqrt{d_k}})V
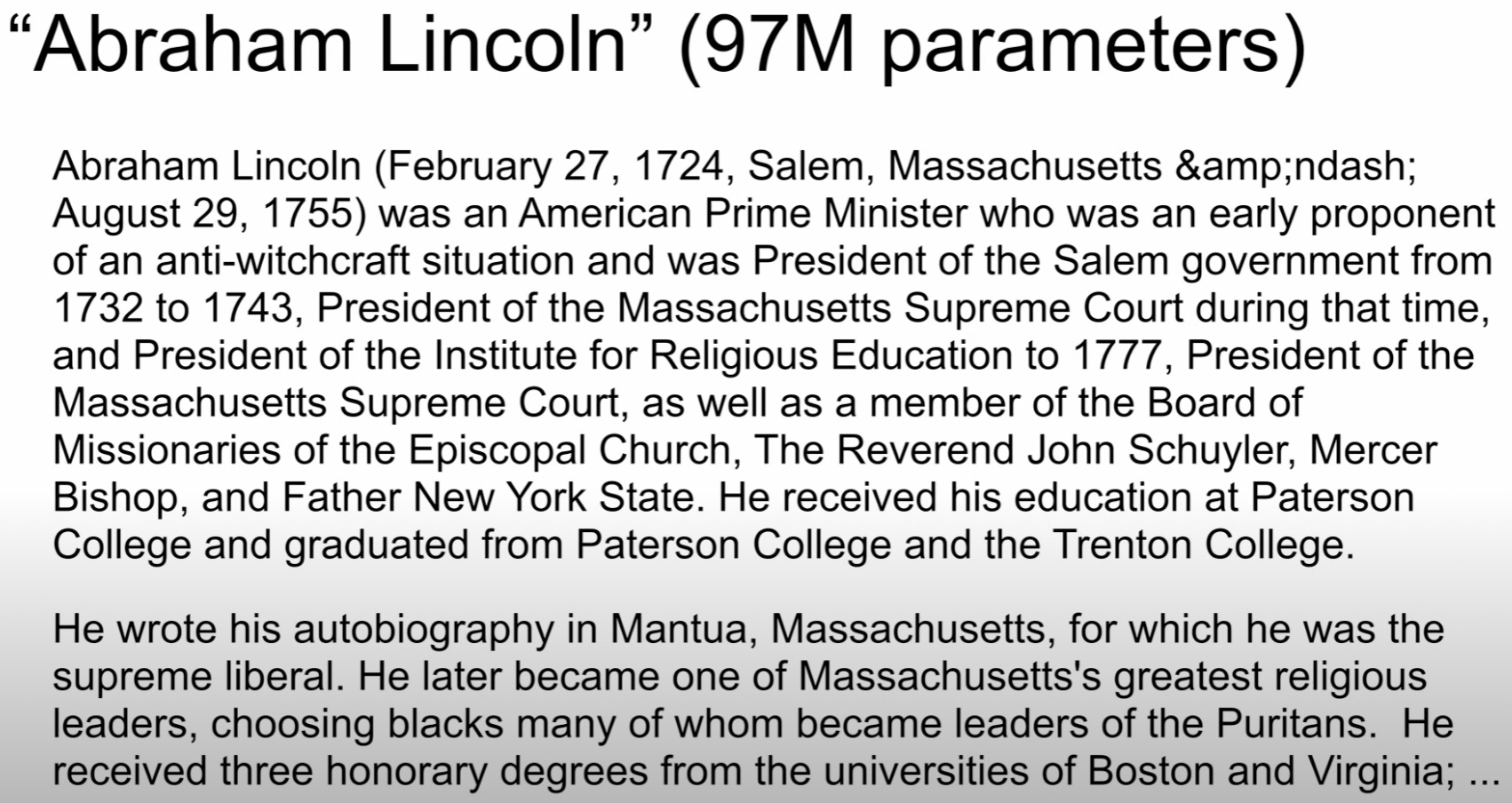
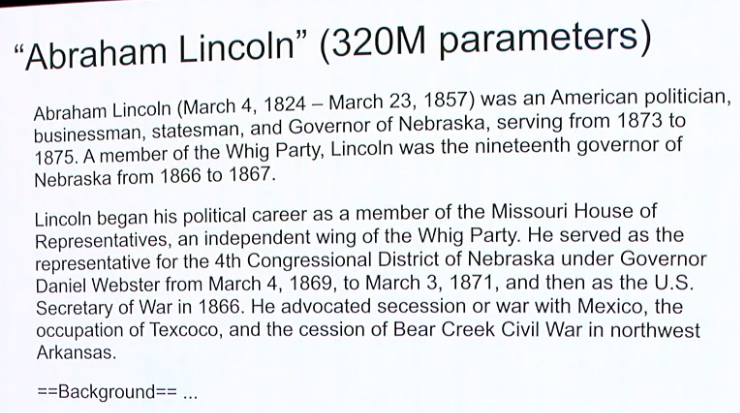
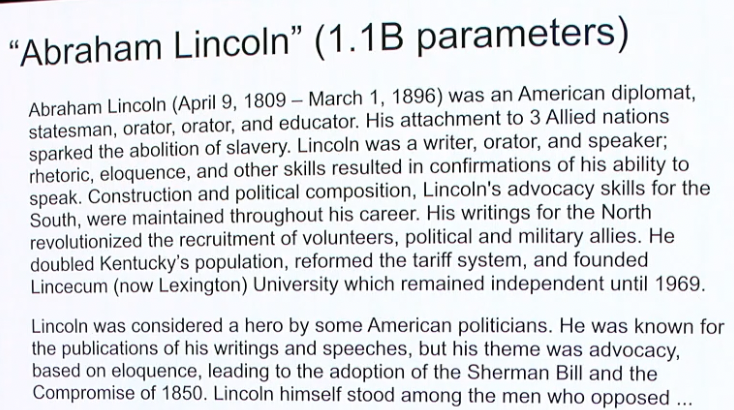
Bigger is Better
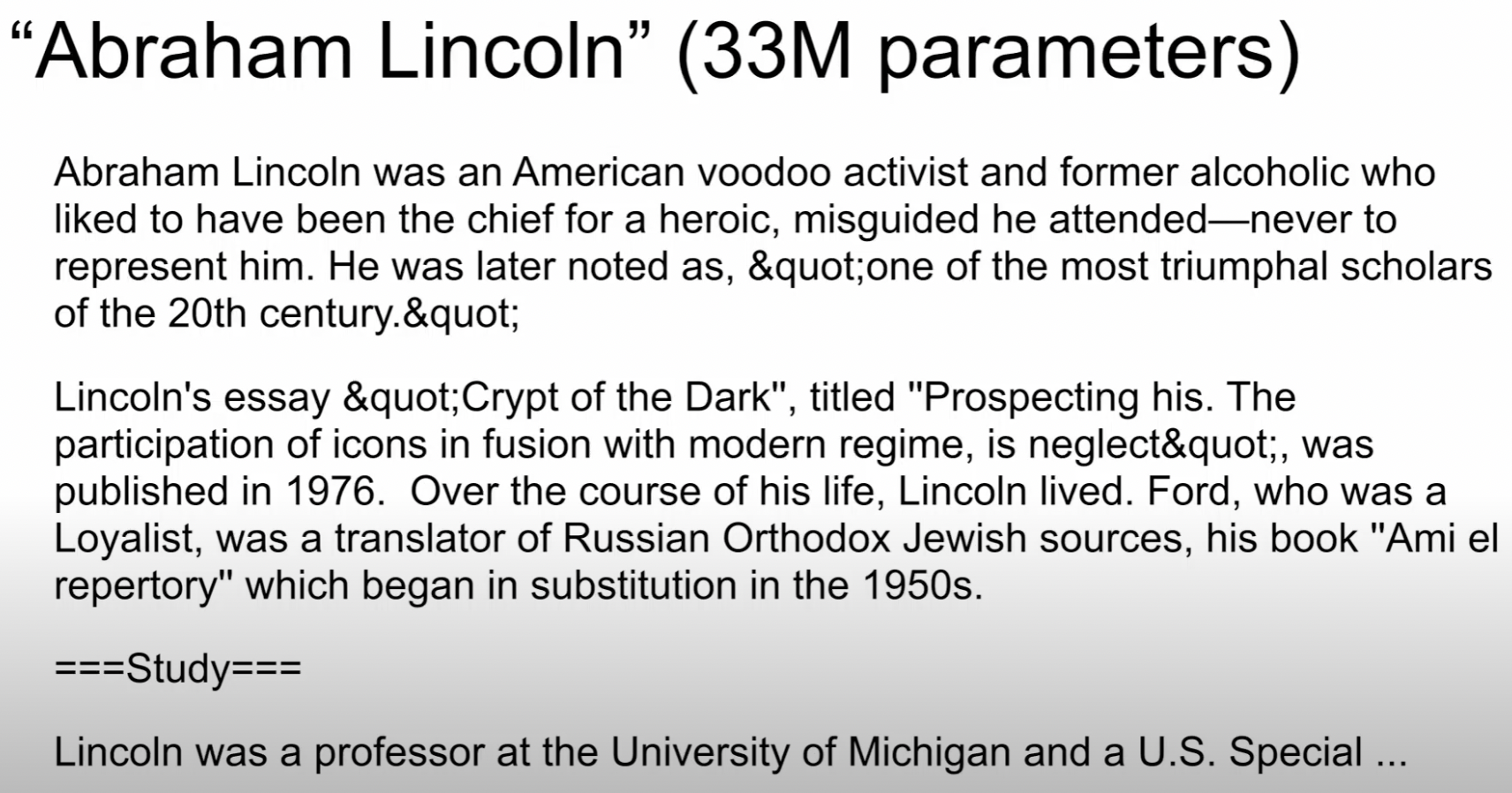
Neural Language Models: Bigger is Better, WeCNLP 2018
Noam Shazeer
Bigger is Better
Neural Language Models: Bigger is Better, WeCNLP 2018
Noam Shazeer
Bigger is Better
Neural Language Models: Bigger is Better, WeCNLP 2018
Noam Shazeer
Bigger is Better
Neural Language Models: Bigger is Better, WeCNLP 2018
Noam Shazeer
Bigger is Better
Neural Language Models: Bigger is Better, WeCNLP 2018
Noam Shazeer
Robot Planning
Visual Commonsense
Robot Programming
Socratic Models
Code as Policies
PaLM-SayCan

Demo
Somewhere in the space of interpolation
Lives
Socratic Models & PaLM-SayCan
One way to use Foundation Models with "language as middleware"
Socratic Models: Composing Zero-Shot Multimodal Reasoning with Language
https://socraticmodels.github.io
Socratic Models & PaLM-SayCan
Socratic Models: Composing Zero-Shot Multimodal Reasoning with Language
https://socraticmodels.github.io
Visual Language Model
CLIP, ALIGN, LiT,
SimVLM, ViLD, MDETR
Human input (task)
One way to use Foundation Models with "language as middleware"
Socratic Models & PaLM-SayCan
Socratic Models: Composing Zero-Shot Multimodal Reasoning with Language
https://socraticmodels.github.io
Visual Language Model
CLIP, ALIGN, LiT,
SimVLM, ViLD, MDETR
Human input (task)
Large Language Models for
High-Level Planning
Language-conditioned Policies
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances say-can.github.io
Language Models as Zero-Shot Planners: Extracting Actionable Knowledge for Embodied Agents wenlong.page/language-planner
One way to use Foundation Models with "language as middleware"
Socratic Models: Robot Pick-and-Place Demo
Socratic Models: Composing Zero-Shot Multimodal Reasoning with Language
https://socraticmodels.github.io

For each step, predict pick & place:
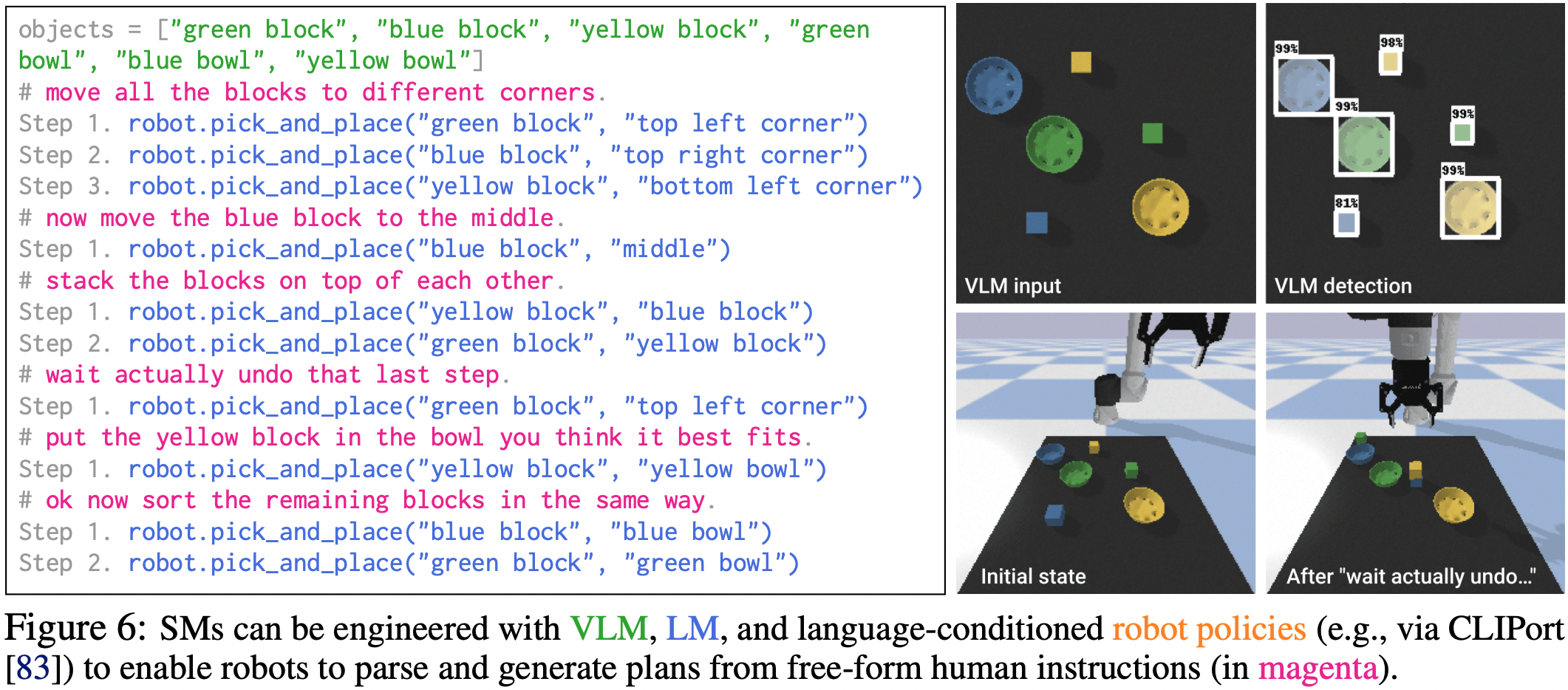
Language models can write code
Code as a medium to express more complex plans

Jacky Liang, Wenlong Huang, Fei Xia, Peng Xu, Karol Hausman, Brian Ichter, Pete Florence, Andy Zeng
code-as-policies.github.io
Code as Policies: Language Model Programs for Embodied Control


Live Demo
In-context learning is supervised meta learning
Trained with autoregressive models via "packing"

x_1, f(x_1), x_2, f(x_2), ..., x_\textrm{query} \rightarrow
f(x_\textrm{query})
f \in \mathcal{F} \quad \textrm{drawn i.i.d. from} \quad D_\mathcal{F}
In-context learning is supervised meta learning
Trained with autoregressive models via "packing"
x_1, f(x_1), x_2, f(x_2), ..., x_\textrm{query} \rightarrow
f(x_\textrm{query})
f \in \mathcal{F} \quad \textrm{drawn i.i.d. from} \quad D_\mathcal{F}
Better with non-recurrent autoregressive sequence models

Transformers at certain scale can generalize to unseen (i.e. tasks)

f
"Data Distributional Properties Drive Emergent In-Context Learning in Transformers"
Chan et al., NeurIPS '22
"General-Purpose In-Context Learning by Meta-Learning Transformers" Kirsch et al., NeurIPS '22
"What Can Transformers Learn In-Context? A Case Study of Simple Function Classes" Garg et al., '22
Language models can write code
Jacky Liang, Wenlong Huang, Fei Xia, Peng Xu, Karol Hausman, Brian Ichter, Pete Florence, Andy Zeng
code-as-policies.github.io
Code as Policies: Language Model Programs for Embodied Control
use NumPy,
SciPy code...
Linguistic Patterns
PaLM-SayCan, Socratic Models, Inner Monologue, Code as Policies
There may be more we can extract from language models
Linguistic Patterns
Non-Linguistic Patterns
General Pattern Machines?
PaLM-SayCan, Socratic Models, Inner Monologue, Code as Policies
There may be more we can extract from language models


Research topic wishlist
- Why/where/when do these pattern emerge from in-context learning?
- Is this unique to the Transformers architecture?
- Do patterns emerge from pretraining in other domains?
- Can this be a mechanism for positive transfer between modalities?
- Which patterns can't be captured with in-context training on Internet data?
- How can we leverage these capabilities more in robotics?
looking for help from the community
Thank you!
Pete Florence
Johnny Lee







Vikas Sindhwani
Vincent Vanhoucke
Kevin Zakka
Michael Ryoo
Maria Attarian
Brian Ichter
Krzysztof Choromanski
Federico Tombari

Jacky Liang
Aveek Purohit
Wenlong Huang
Fei Xia
Peng Xu
Karol Hausman



and many others!
Suvir Mirchandani
Dorsa Sadigh


2023-RSS-workshop-manipulation
By Andy Zeng




