
DeepMind Robotics (formerly known as Brain)
Language as Robot Middleware
Andy Zeng
Life-Long Learning with Human Help (L3H2)
ICRA 2023 Workshop
Manipulation
PaLM-SayCan
RoboPianist
Implicit Behavior Cloning
w/ machine learning
Manipulation
PaLM-SayCan
Interact with the physical world to learn bottom-up commonsense
RoboPianist
Implicit Behavior Cloning
w/ machine learning
i.e. "how the world works"
Building shared priors over robot lifetime(s)
Interact with the physical world to learn bottom-up commonsense
w/ machine learning
i.e. "how the world works"

# Tasks
Data

MARS Reach arm farm '21
Building shared priors over robot lifetime(s)
Interact with the physical world to learn bottom-up commonsense
w/ machine learning
i.e. "how the world works"
# Tasks
Data
Expectation
Reality
Complexity in environment, embodiment, contact, etc.
MARS Reach arm farm '21
Machine learning is a box
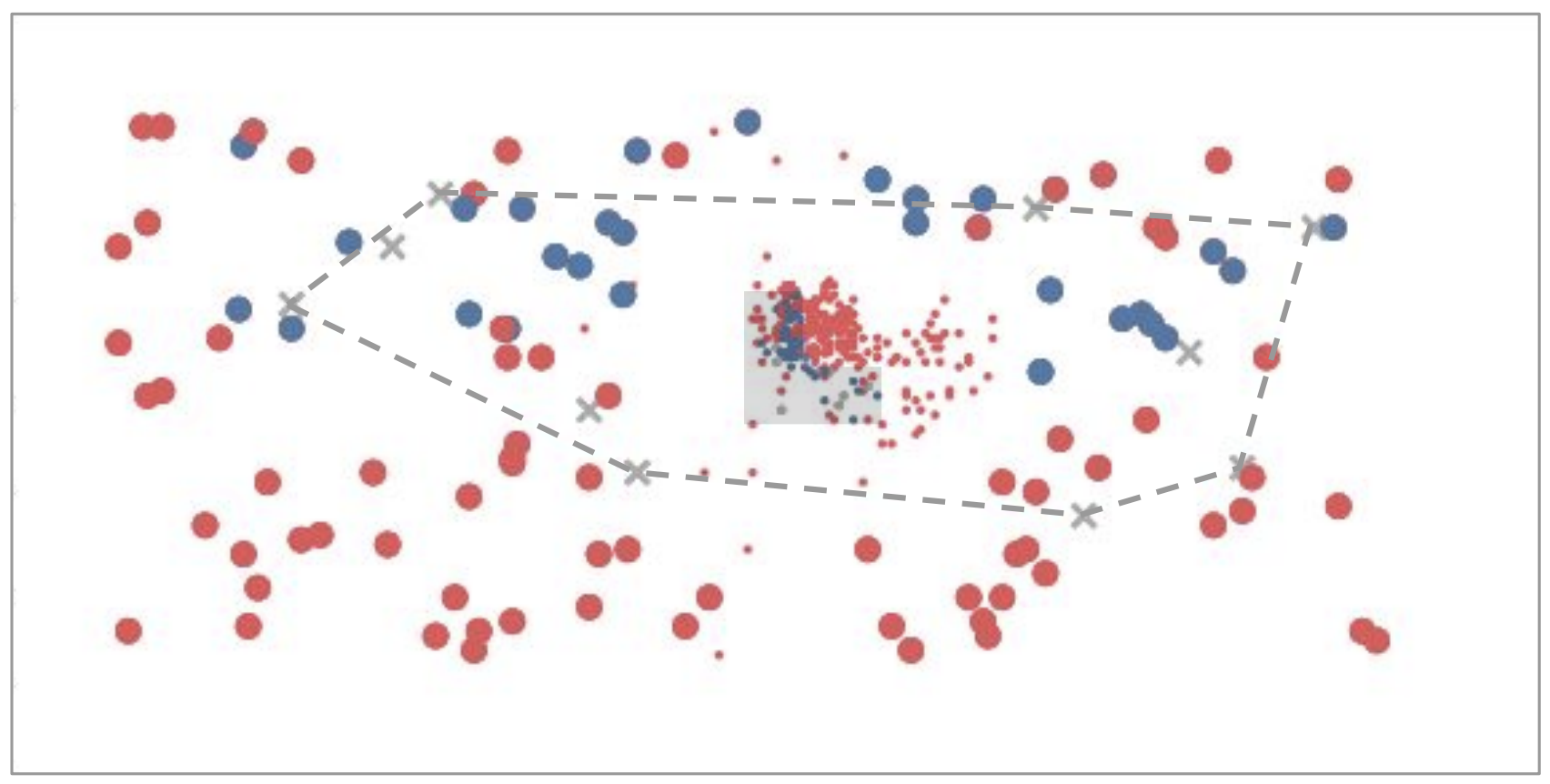
Interpolation
Extrapolation
adapted from Tomás Lozano-Pérez
Machine learning is a box
Interpolation
Extrapolation
Internet
Meanwhile in NLP...
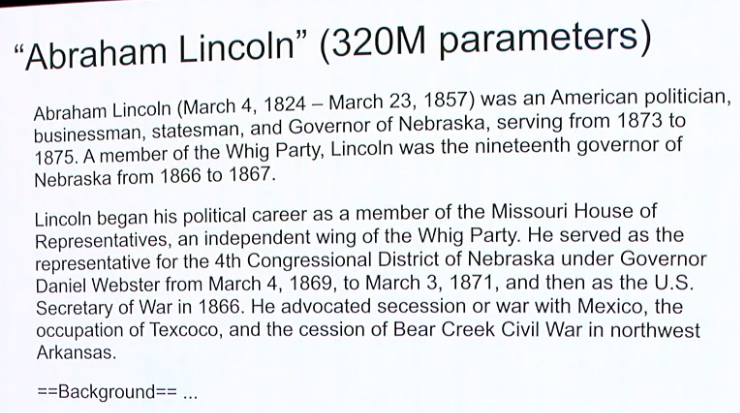
Large Language Models
Large Language Models?
Internet
Meanwhile in NLP...
Books
Recipes
Code
News
Articles
Dialogue
Demo
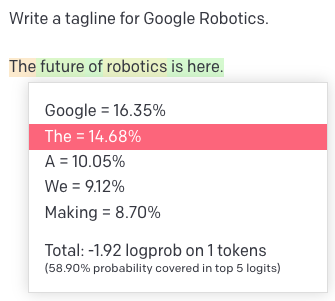
Quick Primer on Language Models
Tokens (inputs & outputs)
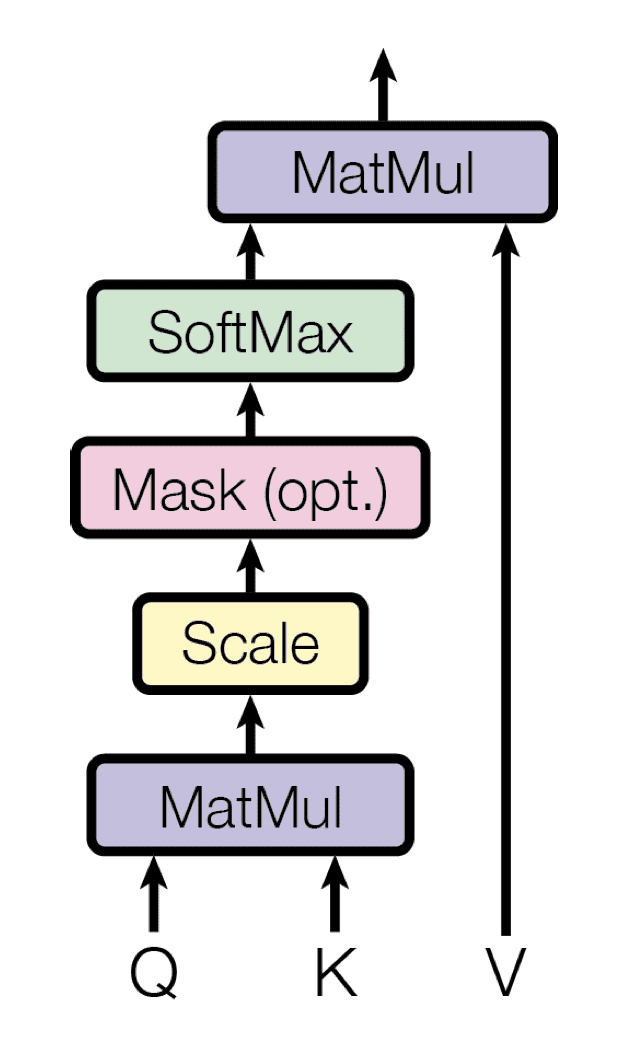
Transformers (models)
Attention Is All You Need, NeurIPS 2017
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N. Gomez, Lukasz Kaiser, Illia Polosukhin
Quick Primer on Language Models
Tokens (inputs & outputs)
Transformers (models)
Pieces of words (BPE encoding)
big
bigger
per word:
biggest
small
smaller
smallest
big
er
per token:
est
small
Attention Is All You Need, NeurIPS 2017
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N. Gomez, Lukasz Kaiser, Illia Polosukhin
Quick Primer on Language Models
Tokens (inputs & outputs)
Transformers (models)
Self-Attention
Pieces of words (BPE encoding)
big
bigger
per word:
biggest
small
smaller
smallest
big
er
per token:
est
small
y
x_1
x_3
x_2
Attention Is All You Need, NeurIPS 2017
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N. Gomez, Lukasz Kaiser, Illia Polosukhin
\text{softmax}(\frac{QK^\intercal}{\sqrt{d_k}})V
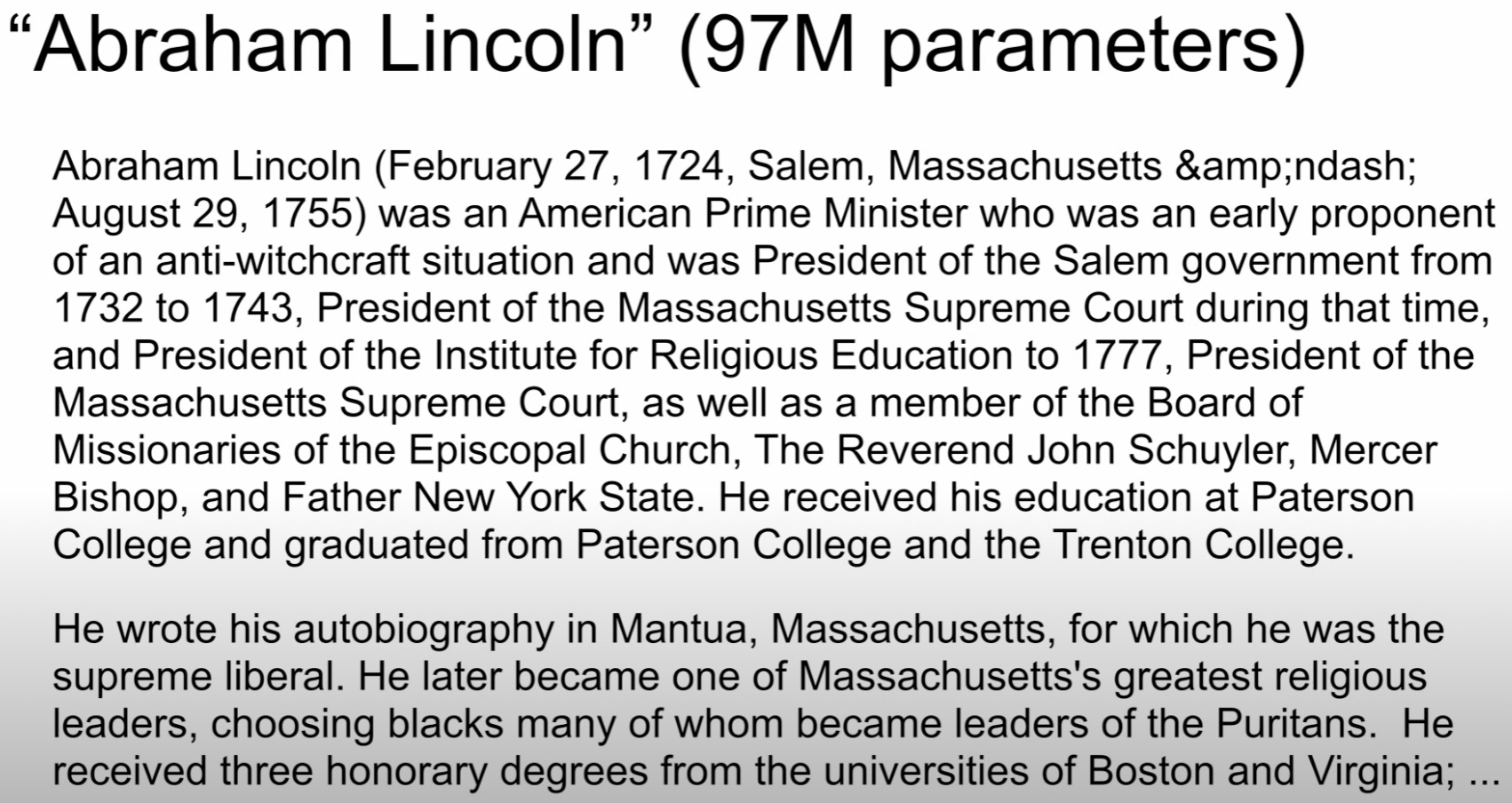
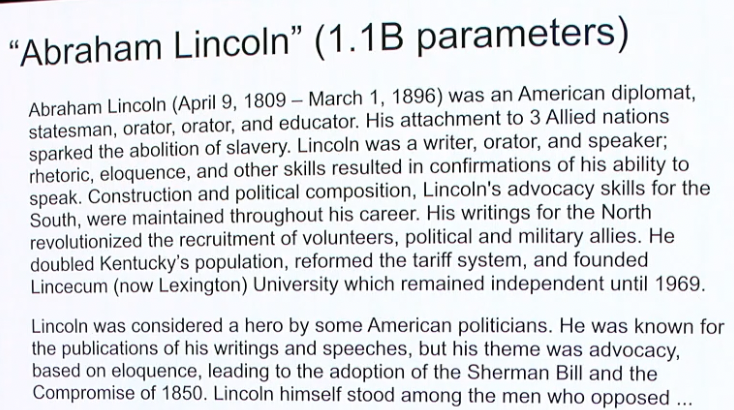
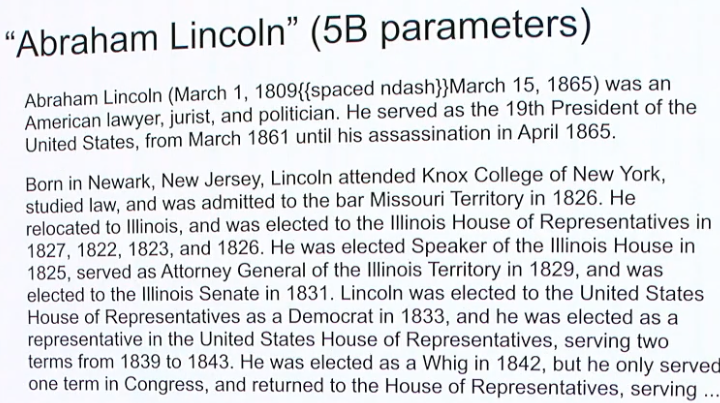
Bigger is Better
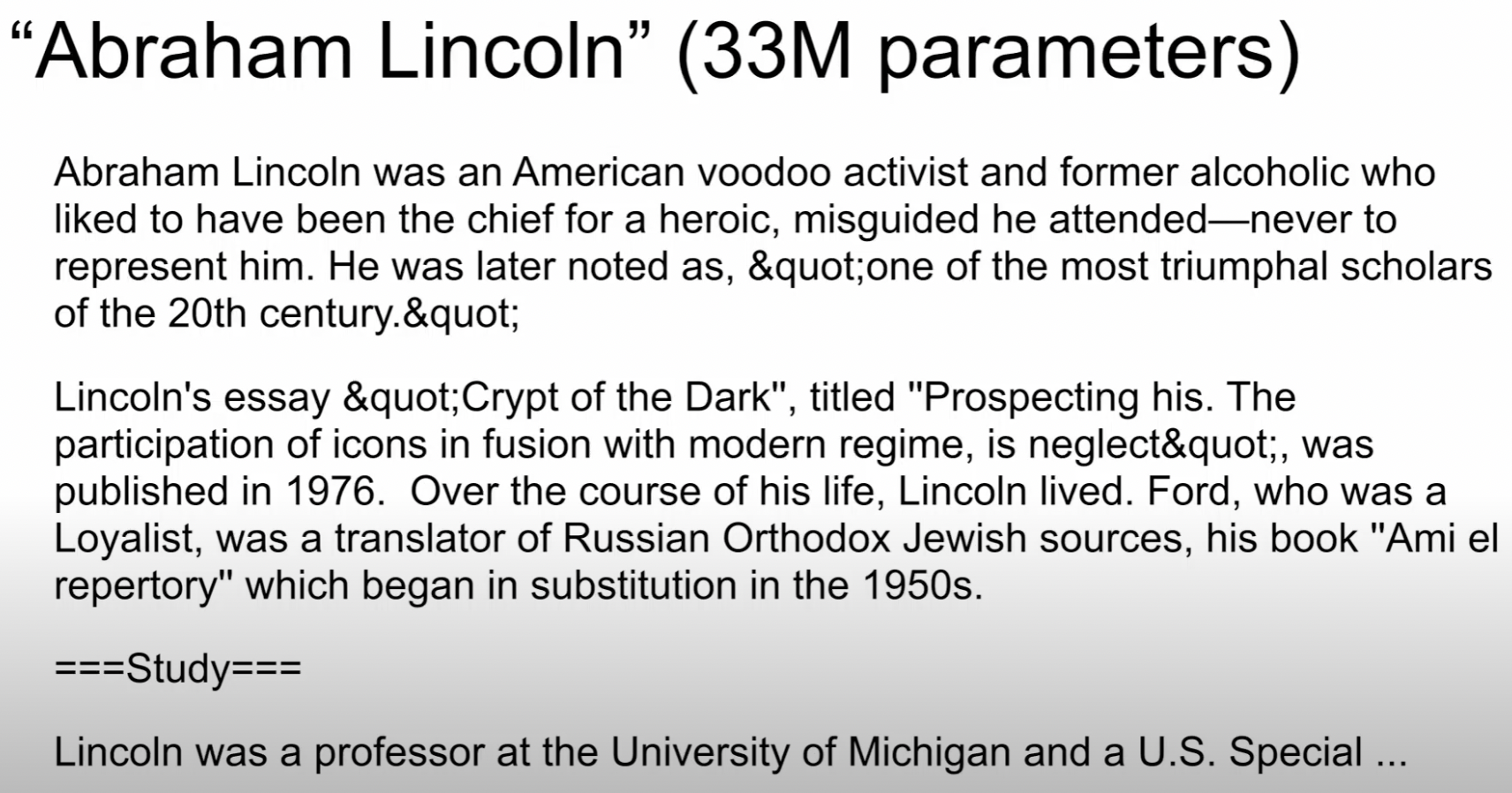
Neural Language Models: Bigger is Better, WeCNLP 2018
Noam Shazeer
Bigger is Better
Neural Language Models: Bigger is Better, WeCNLP 2018
Noam Shazeer
Bigger is Better
Neural Language Models: Bigger is Better, WeCNLP 2018
Noam Shazeer
Bigger is Better
Neural Language Models: Bigger is Better, WeCNLP 2018
Noam Shazeer
Bigger is Better
Neural Language Models: Bigger is Better, WeCNLP 2018
Noam Shazeer
Robot Planning
Visual Commonsense
Robot Programming
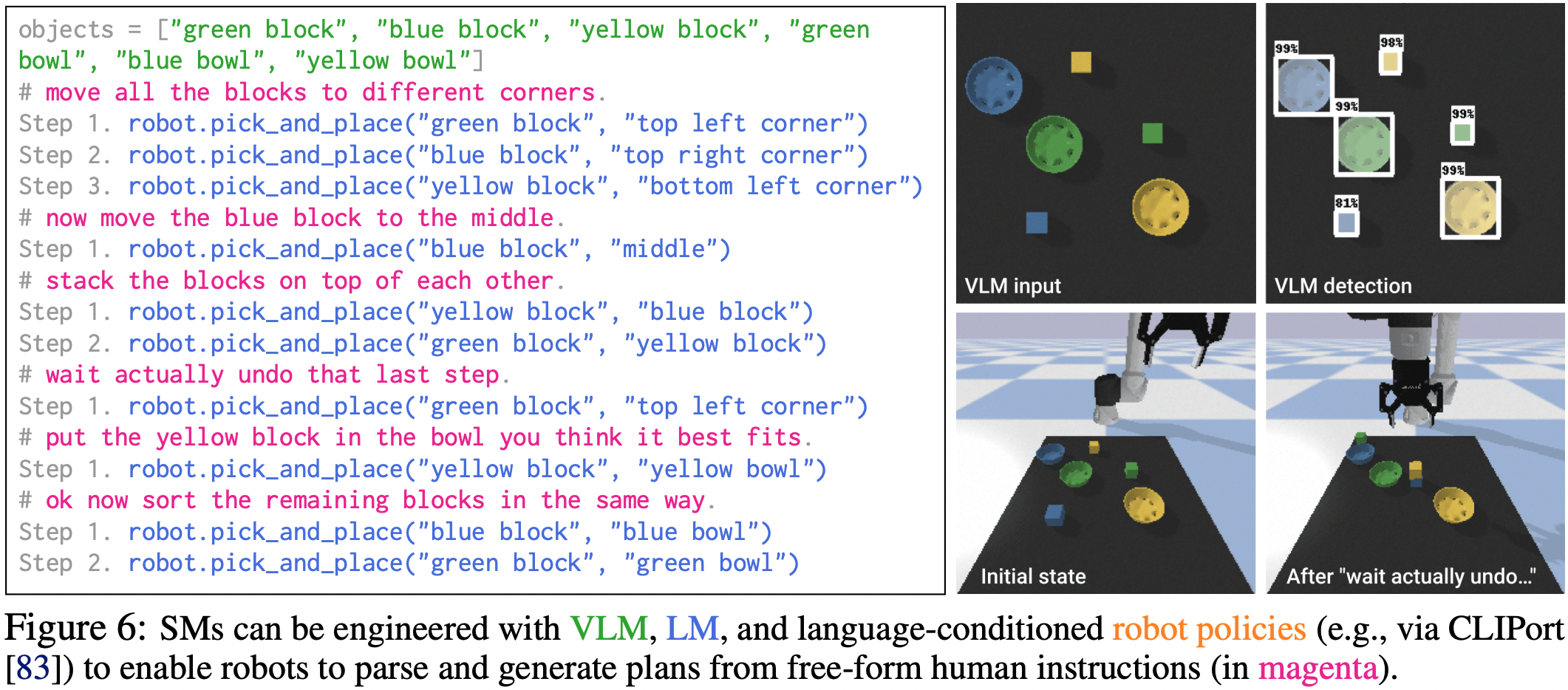
Socratic Models
Code as Policies
PaLM-SayCan

Demo
Somewhere in the space of interpolation
Lives
Socratic Models & PaLM-SayCan
One way to use Foundation Models with "language as middleware"
Socratic Models: Composing Zero-Shot Multimodal Reasoning with Language
https://socraticmodels.github.io
Socratic Models & PaLM-SayCan
Socratic Models: Composing Zero-Shot Multimodal Reasoning with Language
https://socraticmodels.github.io
Visual Language Model
CLIP, ALIGN, LiT,
SimVLM, ViLD, MDETR
Human input (task)
One way to use Foundation Models with "language as middleware"
Socratic Models & PaLM-SayCan
Socratic Models: Composing Zero-Shot Multimodal Reasoning with Language
https://socraticmodels.github.io
Visual Language Model
CLIP, ALIGN, LiT,
SimVLM, ViLD, MDETR
Human input (task)
Large Language Models for
High-Level Planning
Language-conditioned Policies
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances say-can.github.io
Language Models as Zero-Shot Planners: Extracting Actionable Knowledge for Embodied Agents wenlong.page/language-planner
One way to use Foundation Models with "language as middleware"
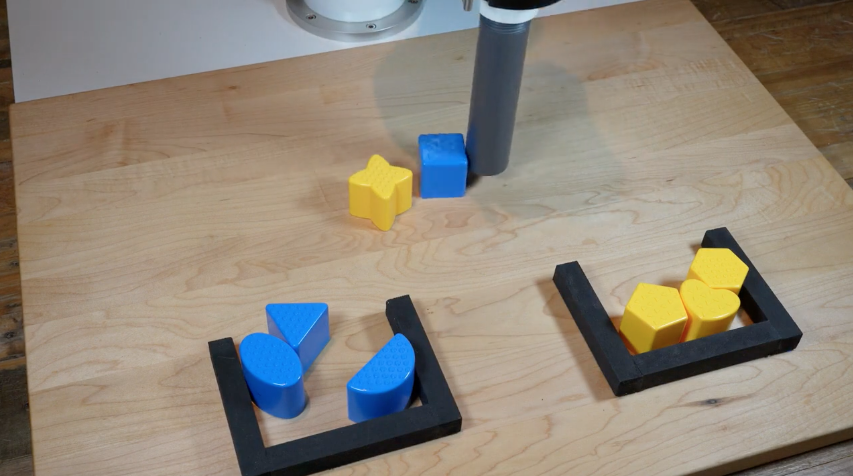
Socratic Models: Robot Pick-and-Place Demo
Socratic Models: Composing Zero-Shot Multimodal Reasoning with Language
https://socraticmodels.github.io

For each step, predict pick & place:
Socratic Models & PaLM-SayCan
Open research problem, but here's one way to do it
Socratic Models: Composing Zero-Shot Multimodal Reasoning with Language
https://socraticmodels.github.io
Visual Language Model
CLIP, ALIGN, LiT,
SimVLM, ViLD, MDETR
Human input (task)
Large Language Models for
High-Level Planning
Language-conditioned Policies
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances say-can.github.io
Language Models as Zero-Shot Planners: Extracting Actionable Knowledge for Embodied Agents wenlong.page/language-planner

Inner Monologue
Inner Monologue: Embodied Reasoning through Planning with Language Models
https://innermonologue.github.io
Limits of language as information bottleneck?
- Loses spatial (numerical) precision
- Highly (distributional) multimodal
- Not as information-rich as other modalities
Limits of language as information bottleneck?
- Loses spatial (numerical) precision
- Highly (distributional) multimodal
- Not as information-rich as other modalities
- Only for high level? what about control?
Perception
Planning
Control
Socratic Models
Inner Monologue
PaLM-SayCan
Wenlong Huang et al, 2022
Imitation? RL?
Engineered?
Intuition and commonsense is not just a high-level thing
Intuition and commonsense is not just a high-level thing
Applies to low-level behaviors too
- spatial: "move a little bit to the left"
- temporal: "move faster"
- functional: "balance yourself"
Behavioral commonsense is the "dark matter" of robotics:
Intuition and commonsense is not just a high-level thing
Can we extract these priors from language models?
Applies to low-level behaviors too
- spatial: "move a little bit to the left"
- temporal: "move faster"
- functional: "balance yourself"
Behavioral commonsense is the "dark matter" of robotics:
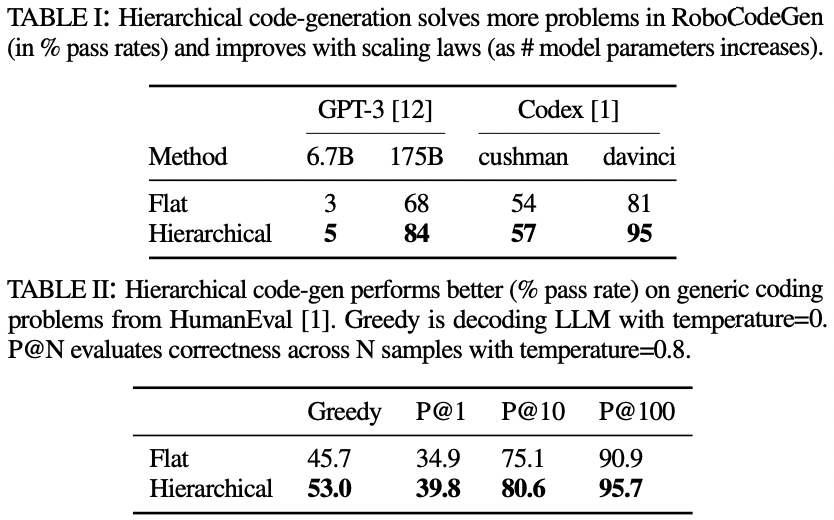
Language models can write code
Code as a medium to express low-level commonsense
Live Demo
In-context learning is supervised meta learning
Trained with autoregressive models via "packing"

x_1, f(x_1), x_2, f(x_2), ..., x_\textrm{query} \rightarrow
f(x_\textrm{query})
f \in \mathcal{F} \quad \textrm{drawn i.i.d. from} \quad D_\mathcal{F}
In-context learning is supervised meta learning
Trained with autoregressive models via "packing"
x_1, f(x_1), x_2, f(x_2), ..., x_\textrm{query} \rightarrow
f(x_\textrm{query})
f \in \mathcal{F} \quad \textrm{drawn i.i.d. from} \quad D_\mathcal{F}
Better with non-recurrent autoregressive sequence models

Transformers at certain scale can generalize to unseen (i.e. tasks)

f
"Data Distributional Properties Drive Emergent In-Context Learning in Transformers"
Chan et al., NeurIPS '22
"General-Purpose In-Context Learning by Meta-Learning Transformers" Kirsch et al., NeurIPS '22
"What Can Transformers Learn In-Context? A Case Study of Simple Function Classes" Garg et al., '22
Language models can write code
Code as a medium to express more complex plans

Jacky Liang, Wenlong Huang, Fei Xia, Peng Xu, Karol Hausman, Brian Ichter, Pete Florence, Andy Zeng
code-as-policies.github.io
Code as Policies: Language Model Programs for Embodied Control


Live Demo
https:youtu.be/byavpcCRaYI
Outstanding Paper Award in Robot Learning Finalist, ICRA 2023
Language models can write code
Code as a medium to express more complex plans
Jacky Liang, Wenlong Huang, Fei Xia, Peng Xu, Karol Hausman, Brian Ichter, Pete Florence, Andy Zeng
code-as-policies.github.io
Code as Policies: Language Model Programs for Embodied Control
Live Demo
Outstanding Paper Award in Robot Learning Finalist, ICRA 2023
Language models can write code
Jacky Liang, Wenlong Huang, Fei Xia, Peng Xu, Karol Hausman, Brian Ichter, Pete Florence, Andy Zeng
code-as-policies.github.io
Code as Policies: Language Model Programs for Embodied Control
use NumPy,
SciPy code...
Outstanding Paper Award in Robot Learning Finalist, ICRA 2023
Language models can write code
Jacky Liang, Wenlong Huang, Fei Xia, Peng Xu, Karol Hausman, Brian Ichter, Pete Florence, Andy Zeng
code-as-policies.github.io
Code as Policies: Language Model Programs for Embodied Control
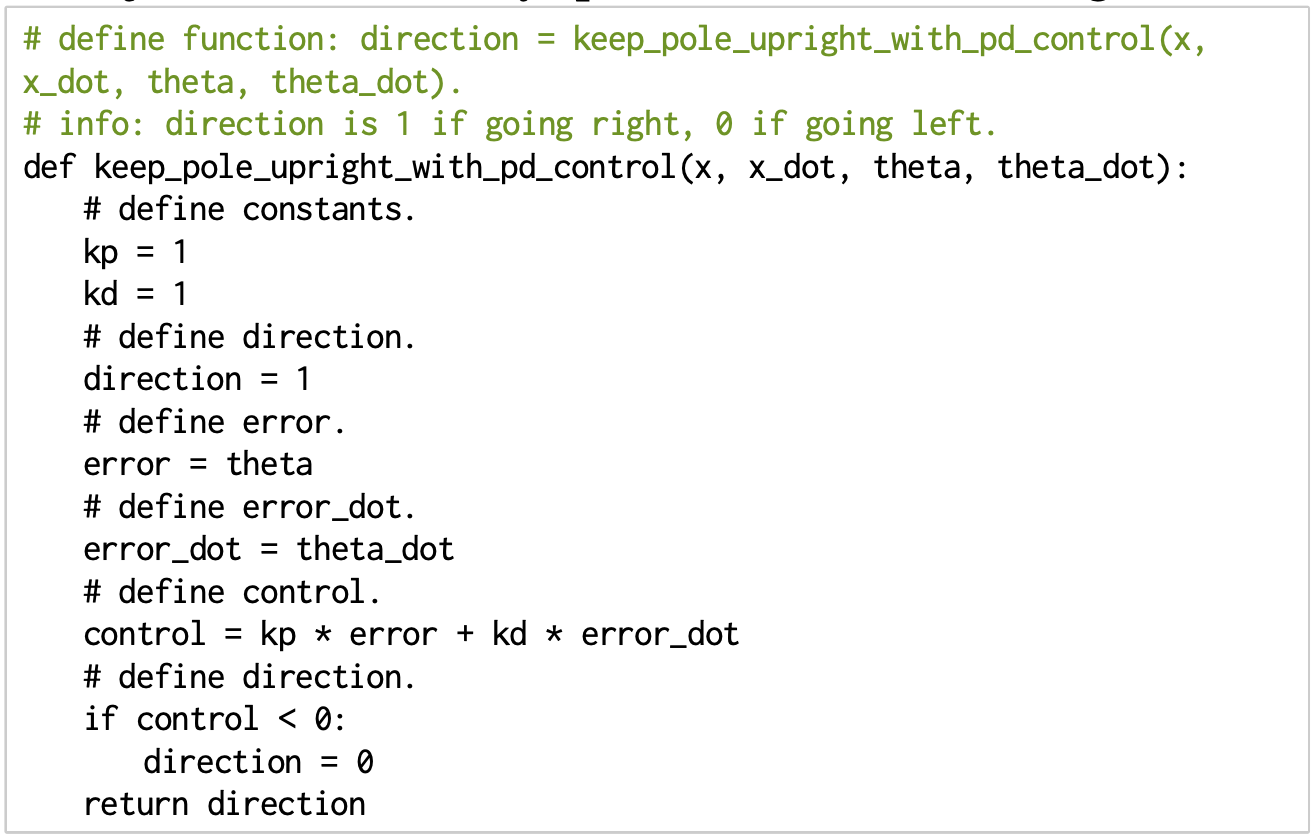
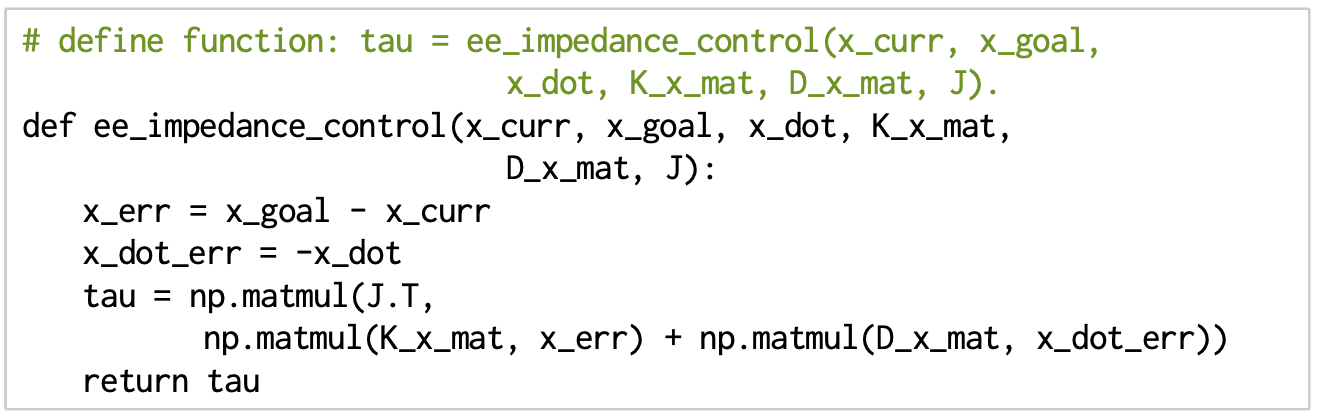
- PD controllers
- impedance controllers
Outstanding Paper Award in Robot Learning Finalist, ICRA 2023
and have probably read your Robotics textbooks too
How much data do we need?
Robot Learning
Not a lot of robot data
Lots of Internet data

500 expert demos
5000 expert demos
50 expert demos
Foundation Models
Robot Learning
Not a lot of robot data
Lots of Internet data

500 expert demos
5000 expert demos
50 expert demos
How much data do we need?
Foundation Models
Robot Learning
Not a lot of robot data
Lots of Internet data

256K token vocab w/ word embedding dim = 18,432
collecting (mostly) diverse data
How much data do we need?
Foundation Models
PaLM-sized robot dataset = 1000 robots for 2 yrs
Robot Learning
- Finding other sources of data (sim, YouTube)
- Improve data efficiency with prior knowledge
Not a lot of robot data
Lots of Internet data
256K token vocab w/ word embedding dim = 18,432
collecting (mostly) diverse data
How much data do we need?
Foundation Models
PaLM-sized robot dataset = 1000 robots for 2 yrs
Robot Learning
Foundation Models
- Finding other sources of data (sim, YouTube)
- Improve data efficiency with prior knowledge
Not a lot of robot data
Lots of Internet data
Embrace foundation models to help close the gap!
256K token vocab w/ word embedding dim = 18,432
PaLM-sized robot dataset = 1000 robots for 2 yrs
collecting (mostly) diverse data
How much data do we need?
Robot Learning
Foundation Models
Not a lot of robot data
Lots of Internet data
Embrace foundation models to help close the gap!
Life-Long Robot Learning with Foundation Models
Foundation
Models
Embodied AI
Continual Life-Long Learning
Commonsense & Skill Acquisition
Bootstrap Robot Learning
Fast Learning
Memory
Online Adaptation
Offline Processing
Day-Night Recipe for Life-Long Robot Learning

In-Context Learning
1. Model Finetuning
2. Embedded Mapping
towards autonomous self-improvement
Fast Learning
Memory
Online Adaptation
Offline Processing
Day-Night Recipe for Life-Long Robot Learning
In-Context Learning
1. Model Finetuning
2. Embedded Mapping
towards autonomous self-improvement
Day-Night w/ PaLM-E: Embodied Multimodal Language Model

Finetuning pre-trained models helps

Larger models are less forgetful

Day-Night w/ PaLM-E: Embodied Multimodal Language Model
Fast Learning
Memory
Online Adaptation
Offline Processing
Day-Night Recipe for Life-Long Robot Learning
In-Context Learning
1. Model Finetuning
2. Embedded Mapping
towards autonomous self-improvement
Fast Learning
Memory
Online Adaptation
Offline Processing
Day-Night Recipe for Life-Long Robot Learning
In-Context Learning
1. Model Finetuning
2. Embedded Mapping
towards autonomous self-improvement
Day-Night w/ Visual (Audio) Language Maps
1. Fuse visual-language features into robot maps
2. Use Code as Policies to do spatial reasoning for navigation
"Visual Language Maps" Chenguang Huang et al., ICRA 2023

"Audio Visual Language Maps" Chenguang Huang et al., 2023
Fuse all the modalities! (including audio)
(i.e. semantic memory with Foundation Models)
Fast Learning
Memory
Online Adaptation
Offline Processing
Day-Night Recipe for Life-Long Robot Learning
towards autonomous self-improvement
Thank you!
Pete Florence
Adrian Wong
Johnny Lee








Vikas Sindhwani
Danny Driess
Vincent Vanhoucke
Kevin Zakka
Michael Ryoo
Maria Attarian
Brian Ichter
Krzysztof Choromanski
Federico Tombari

Jacky Liang
Aveek Purohit
Wenlong Huang
Fei Xia
Peng Xu
Karol Hausman



and many others!

2023-ICRA-Workshop-Lifelong
By Andy Zeng




