

Gülçin Yıldırım Jelínek
Staff Database Engineer @Xata, Main Organizer @Prague PostgreSQL Meetup, MSc, Computer and Systems Engineering @ Tallinn University of Technology, BSc, Applied Mathematics @Yildiz Technical University
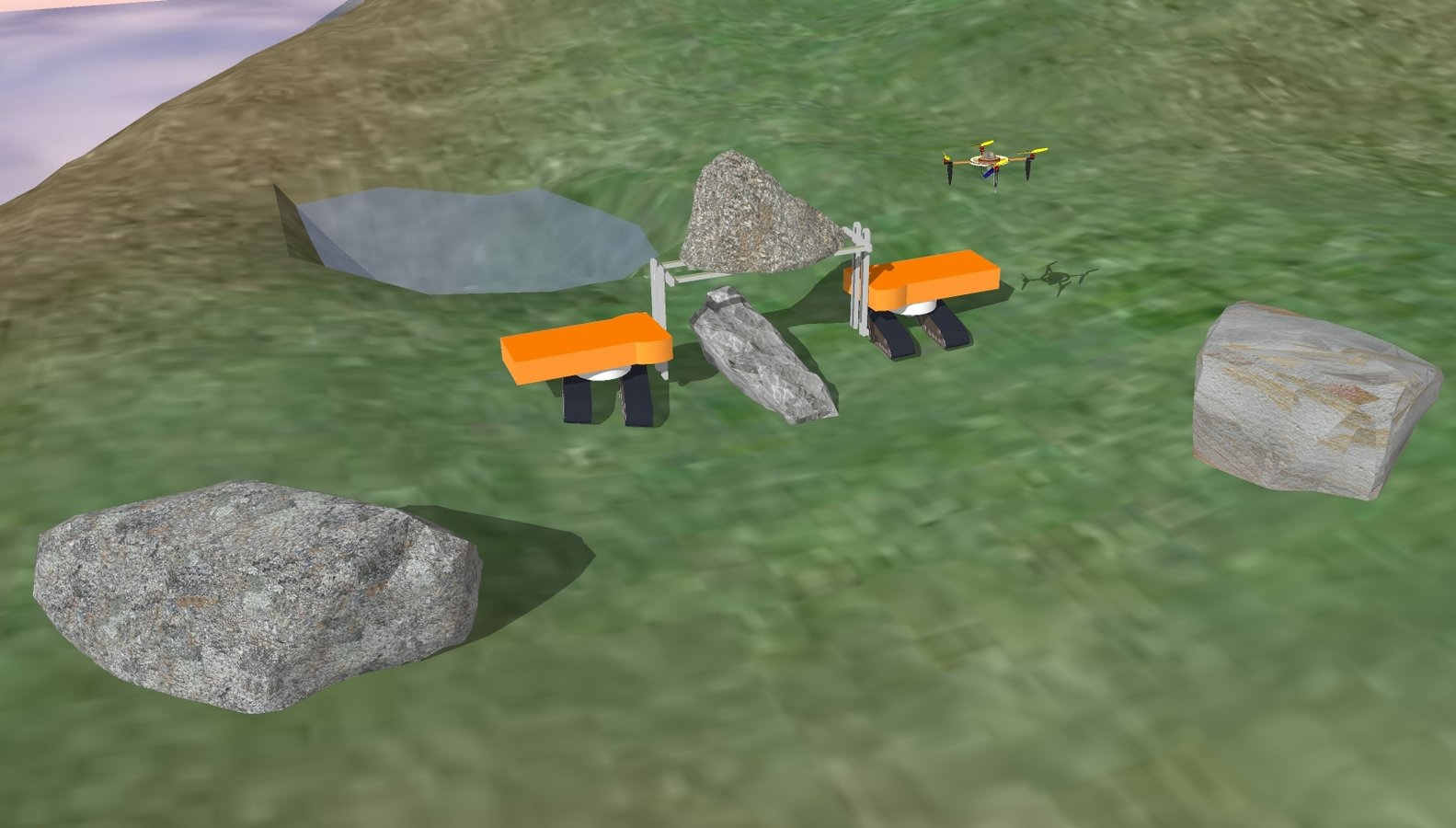
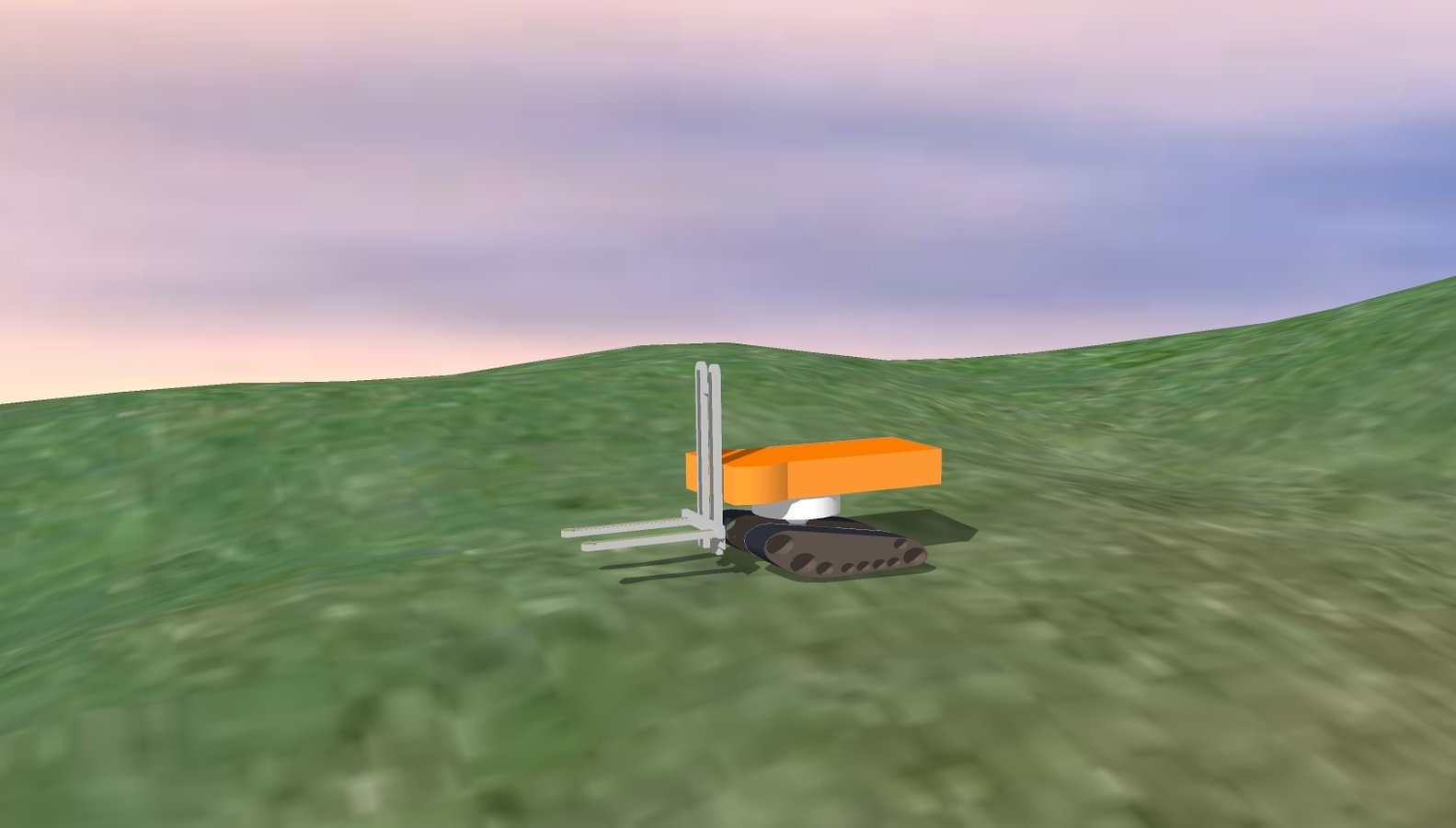
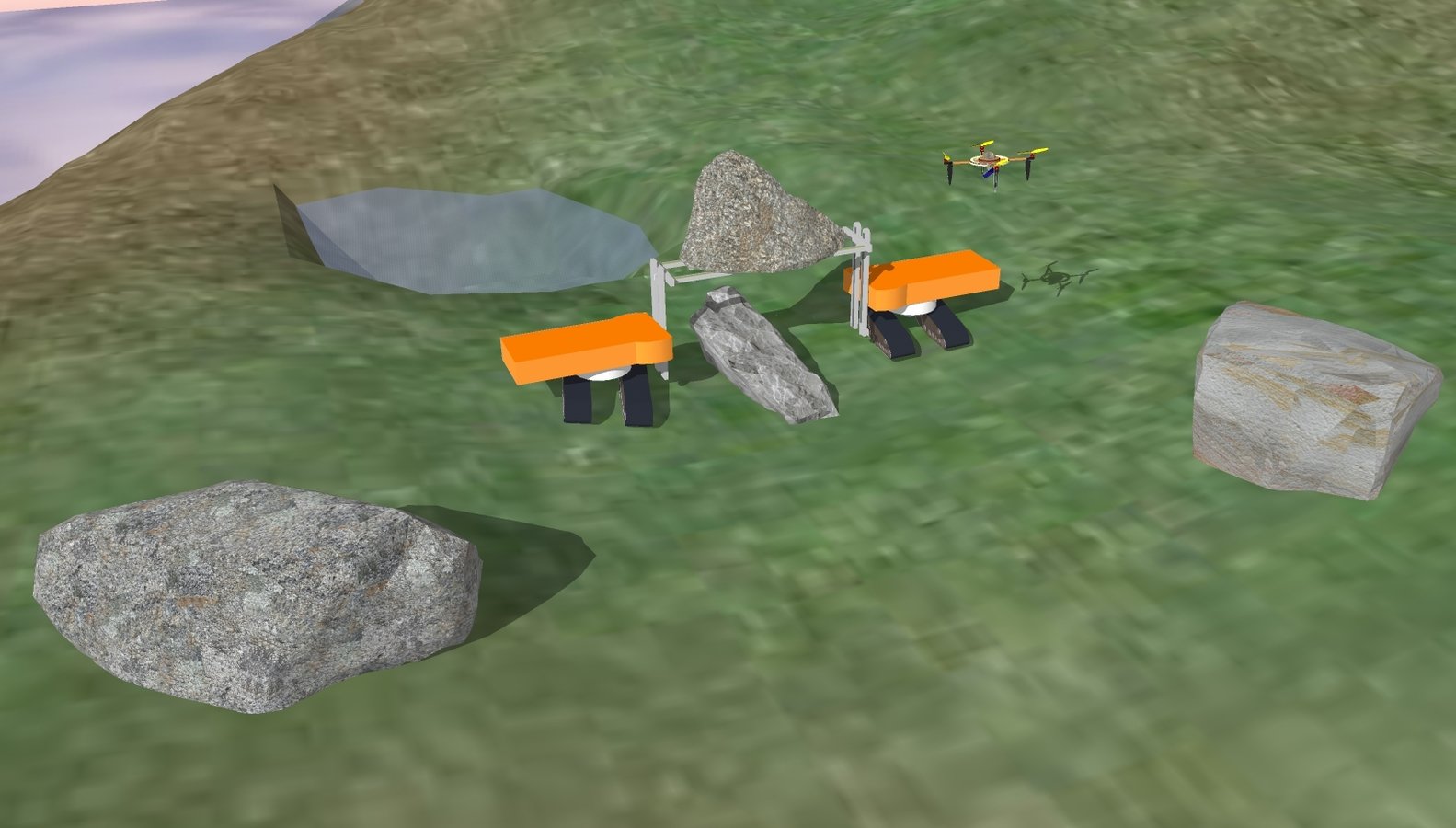
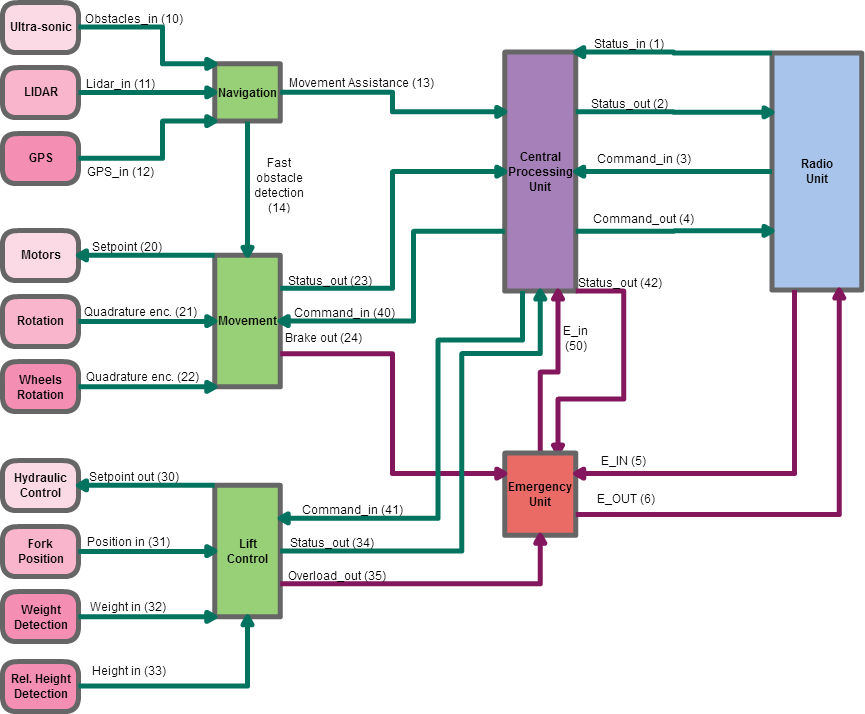
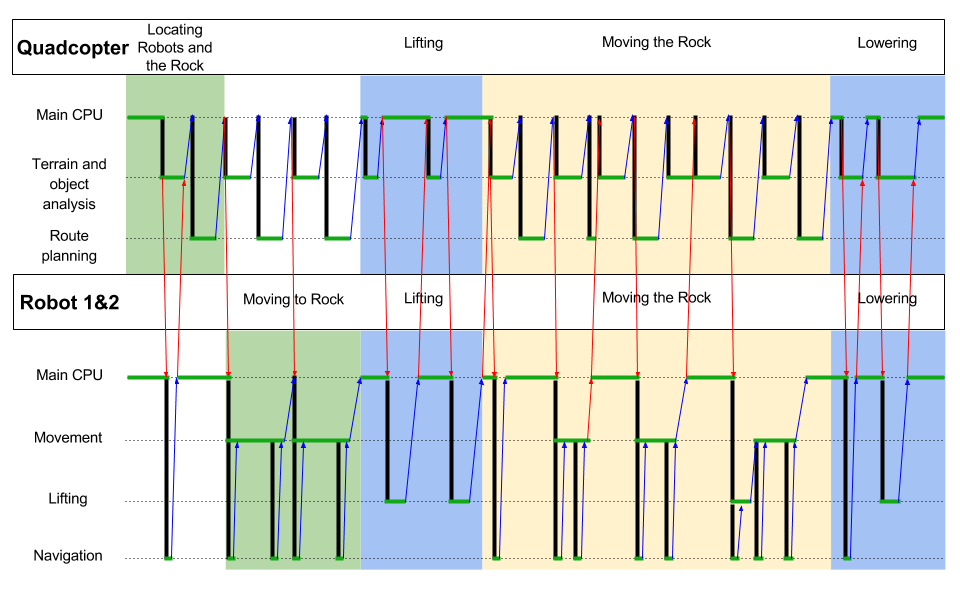
2 autonomous robots + 1 quadcopter (master)
GPS
Lidar
Weight sensor
Quadrature encoders
GPS
Camera
Lidar
Flight control sensors:
Barometer for altitude control
Magnetic field sensor for direction control
Motors for moving tracks
Motors for moving the top part of the robot
Hydraulics for forks
By Gülçin Yıldırım Jelínek
This presentation is created for Timing Analysis of Software Dynamic Properties lecture of Computer Systems Engineering master programme at Tallinn University of Technology



