Motion planning around obstacles with Graphs of Convex Sets
Russ Tedrake
Columbia ME Seminar
May 5, 2023
Slides available live at https://slides.com/d/548A4jE/live
or later at https://slides.com/russtedrake/2023-columbia

A golden age for robotics


"What's still hard for AI" by Kai-Fu Lee:
-
AI cannot create, conceptualize, or manage complex strategic planning.
-
AI cannot accomplish complex work that requires precise hand-eye coordination.
-
AI cannot deal with unknown and unstructured spaces, especially ones that it hasn’t observed.
-
AI cannot, unlike humans, feel or interact with empathy and compassion; therefore, it is unlikely that humans would opt for interacting with an apathetic robot for traditional communication services.
Kai-Fu's key axes of development:
- Manual dexterity
- Social intelligence (empathy/compassion)
written in 2018




Goal #1: Motion planning
Efficient algorithms for (approximate) global optimization-based planning for manipulators with dynamic constraints
image credit: James Kuffner
Goal #2: Deeper connections between

Trajectory optimization
Sample-based planning
AI-style logical planning
Combinatorial optimization
Shortest Paths in Graphs of Convex Sets.
Tobia Marcucci, Jack Umenberger, Pablo Parrilo, Russ Tedrake.
Available at: https://arxiv.org/abs/2101.11565


Motion Planning around Obstacles with Convex Optimization.
Tobia Marcucci, Mark Petersen, David von Wrangel, Russ Tedrake.
Available at: https://arxiv.org/abs/2205.04422


Running example: Shortest path around an obstacle
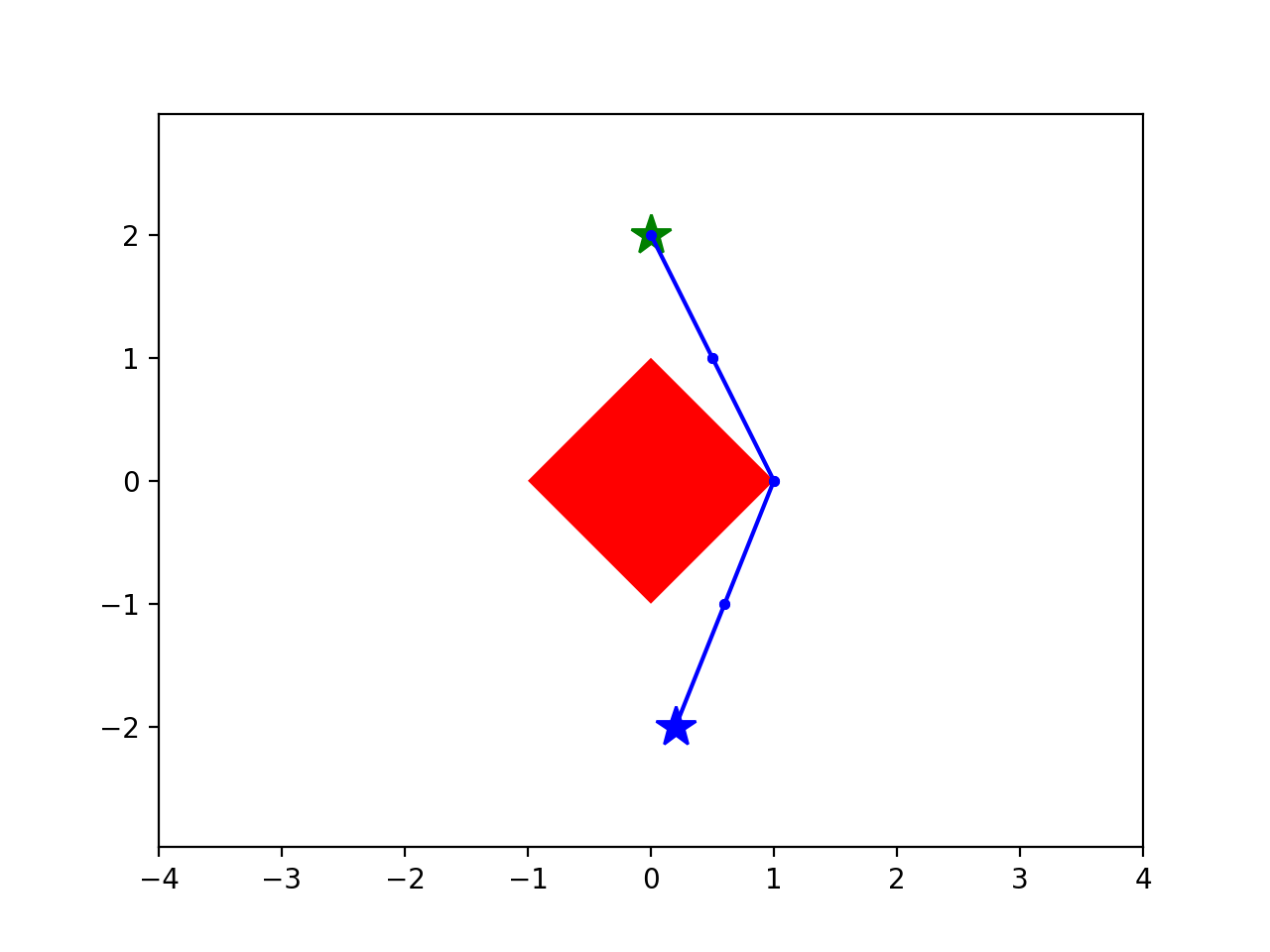
start
goal

- Combinatorial (e.g. over homotopy classes)
- Smooth optimization (over curves)
Two aspects of the motion planning problem:

start
goal
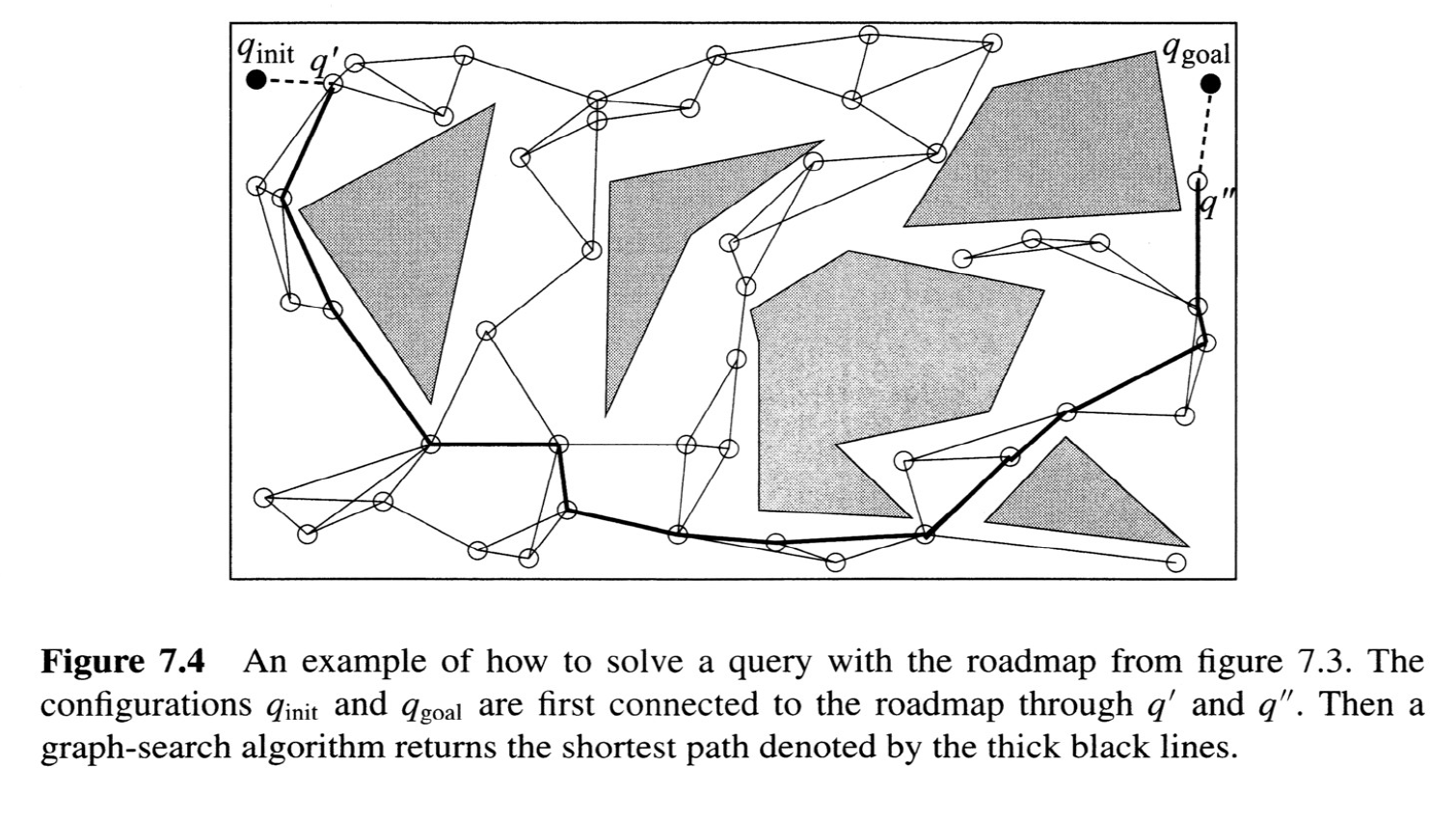
Combinatorial: Sampling-based motion planning
The Probabilistic Roadmap (PRM)
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
Smooth: Trajectory Optimization
A preview of the results...
Default playback at .25x

Sampling-based motion planning
The Probabilistic Roadmap (PRM)
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
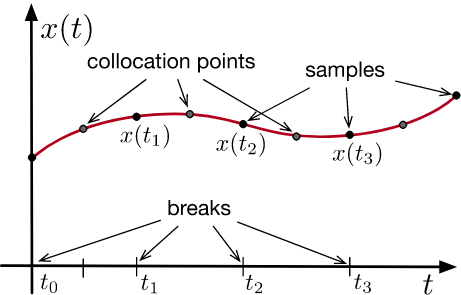
- Guaranteed collision-free along piecewise polynomial trajectories
- Complete/globally optimal within convex decomposition
- Very efficient solutions
Key ingredients
- The linear programming formulation of the shortest path problem on a discrete graph.
- Convex formulations of continuous motion planning (without obstacle navigation), for example:
- New Graphs of Convex Sets (GCS) machinery
- New approximate convex decompositions of configuration space
Kinematic Trajectory Optimization
(for robot arms)
Motion planning as an optimization
Motion planning as a (nonconvex) optimization
\begin{aligned} \min_{x_0, ..., x_N} \quad & \sum_{n=0}^{N-1} | x_{n+1} - x_n|_2^2 & \\
\text{subject to} \quad & x_0 = x_{start} \\ & x_N = x_{goal} \\ & |x_n|_1 \ge 1 & \forall n \end{aligned}
start
goal
fixed number of samples
collision-avoidance
(outside the \(L^1\) ball)
nonconvex
Planning as a (nonconvex) optimization
Planning as a mixed-integer convex program
\begin{aligned} \min_{x_0, ..., x_N} \quad & \sum_{n=0}^{N-1} | x_{n+1} - x_n|_2^2 & \\
\text{subject to} \quad & x_0 = x_{start} \\ & x_N = x_{goal} \end{aligned}
[1,1]^T x_n \ge 1 \quad \textbf{or} \quad
[1,1]^T x_n \le -1 \quad \textbf{or} \\
[1,-1]^T x_n \ge 1 \quad \textbf{or} \quad
[1,-1]^T x_n \le -1, \quad \forall n.
goal
start
[1,1]
disjunctive
constraints
[1,1]^T x_n \ge 1
Planning as a mixed-integer convex program
Mixed-integer programs
\begin{aligned} \underset{x, b}{\text{minimize}} \quad & f(x, b) \\
\text{subject to} \quad & g(x, b) \le 0 \\ & b_i \in \{0, 1\}, \forall i \end{aligned}
0 \le b_i \le 1
"Convex relaxation" replaces this with:
"Mixed-integer convex" iff \(f\) and \(g\) are convex.
Convex relaxation is "tight" when the relaxed solution is a solution to the original problem.
Branch and bound
b_0 = 0.9, b_1 = 0.4
b_0 = 1
b_0 = 0
b_1 = 1
b_1 = 0
Convex relaxations provide lower bounds
Feasible solutions provide upper bounds
convex
convex
convex
convex
convex
\begin{aligned} \underset{x, b}{\text{minimize}} \quad & f(x, b) \\
\text{subject to} \quad & g(x, b) \le 0 \\ & b_i \in \{0, 1\}, \forall i \end{aligned}
Branch and bound performance
- Number of integer variables
- "Tightness" of the convex relaxation
- Motion planning transcription:
\(\Rightarrow\) Long solve times.
b_0 = 0.9, b_1 = 0.4
b_0 = 1
b_0 = 0
b_1 = 1
b_1 = 0
- Too many integer variables (false combinatorial complexity)
- Disjunctive programming leads to "loose" relaxations
Planning as a mixed-integer convex program
This is the convex relaxation
(it is very loose!).
Pablo asked the right question...
"We know that the LP formulation of the shortest path problem is tight. Why exactly are your relaxations so loose?"

- Vertices \(V\)
- (Directed) edges \(E\)
Traditional Shortest Path as a Linear Program (LP)
\(\varphi_{ij} = 1\) if the edge \((i,j)\) in shortest path, otherwise \(\varphi_{ij} = 0.\)
\(c_{ij} \) is the (constant) length of edge \((i,j).\)
\begin{aligned} \min_{\varphi} \quad & \sum_{(i,j) \in E} c_{ij} \varphi_{ij} \\
\mathrm{s.t.} \quad
& \sum_{j \in E_i^{out}} \varphi_{ij} + \delta_{ti} = \sum_{j \in E_i^{in}} \varphi_{ji} + \delta_{si}, && \forall i \in V, \\
& \varphi_{ij} \in {0, 1}, && \forall (i,j) \in E.
\end{aligned}
"flow constraints"
binary relaxation
path length
\begin{aligned} \min_{\varphi} \quad & \sum_{(i,j) \in E} c_{ij} \varphi_{ij} \\
\mathrm{s.t.} \quad
& \sum_{j \in E_i^{out}} \varphi_{ij} + \delta_{ti} = \sum_{j \in E_i^{in}} \varphi_{ji} + \delta_{si}, && \forall i \in V, \\
& \varphi_{ij} \ge 0, && \forall (i,j) \in E.
\end{aligned}
Graphs of Convex Sets

-
For each \(i \in V:\)
- Compact convex set \(X_i \subset \R^d\)
- A point \(x_i \in X_i \)
- Edge length given by a convex function \[ \ell(x_i, x_j) \]
Note: The blue regions are not obstacles.
New shortest path formulation
\begin{aligned} \min_{\varphi} \quad & \sum_{(i,j) \in E} c_{ij} \varphi_{ij} \\
\mathrm{s.t.} \quad
& \sum_{j \in E_i^{out}} \varphi_{ij} + \delta_{ti} = \sum_{j \in E_i^{in}} \varphi_{ji} + \delta_{si}, && \forall i \in V, \\
& \varphi_{ij} \geq 0, && \forall (i,j) \in E.
\end{aligned}
Classic shortest path LP
\begin{aligned} \min_{\varphi,x} \quad & \sum_{(i,j) \in E} \ell_{ij}(x_i, x_j) \varphi_{ij} \\
\mathrm{s.t.} \quad
& x_i \in X_i, && \forall i \in V, \\
& \sum_{j \in E_i^{out}} \varphi_{ij} + \delta_{ti} = \sum_{j \in E_i^{in}} \varphi_{ji} + \delta_{si} \le 1, && \forall i \in V, \\
& \varphi_{ij} \geq 0, && \forall (i,j) \in E.
\end{aligned}
now w/ Convex Sets
New shortest path formulation
\begin{aligned} \min_{\varphi,x} \quad & \sum_{(i,j) \in E} \ell_{ij}(x_i, x_j) \varphi_{ij} \\
\mathrm{s.t.} \quad
& x_i \in X_i, && \forall i \in V, \\
& \sum_{j \in E_i^{out}} \varphi_{ij} + \delta_{ti} = \sum_{j \in E_i^{in}} \varphi_{ji} + \delta_{si} \le 1, && \forall i \in V, \\
& \varphi_{ij} \geq 0, && \forall (i,j) \in E.
\end{aligned}
Non-negative scaling of a convex set is still convex (e.g. via "perspective functions")
Achieved orders of magnitude speedups.
Tightening the convex relaxation
- Tobia continued to study the convex relaxation on simple graphs.
- Pablo: "you're still missing a constraint"
\sum_{j \in E_i^{in}} \varphi_{ji} = \sum_{k \in E_i^{out}} \varphi_{ik}
\sum_{j \in E_i^{in}} \varphi_{ji}x_i = \sum_{k \in E_i^{out}} \varphi_{ik}x_i
Conservation of flow
Spatial conservation of flow
(this was the missing constraint!)
\varphi_{ji}
\varphi_{ik}
X_i
Motion planning with Graph of Convex Sets (GCS)
\ell_{i,j}(x_i, x_j) = |x_i - x_j|_2
start
goal
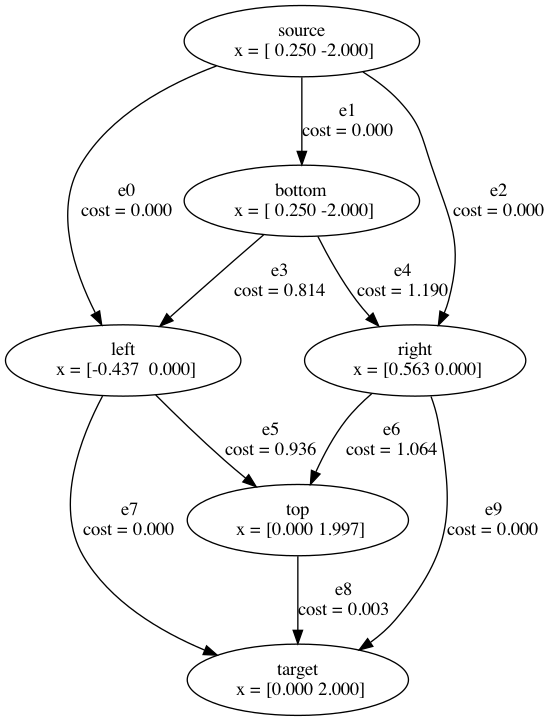
Motion planning with Graph of Convex Sets (GCS)
This is the convex relaxation
(it is tight!).
is the convex relaxation. (it's tight!)

Previous formulations were intractable; would have required \( 6.25 \times 10^6\) binaries.
Euclidean shortest path

- Finding the shortest path from A to B while avoiding polygonal obstacles (“Euclidean shortest path”):
- Solvable in polytime in 2D (with a visibility graph)
- NP-hard from 3 dimensions on
- For the 3D case there exists an approximation algorithm which gives you \(\epsilon\)-optimality in poly time
- Nothing is known for dimension \(\ge 4\)
- New formulation:
- Provides polynomial-time algorithm for dimension \(\ge 4\) that is often tight.
- Solves a more general class of problems (e.g. can add dynamic constraints).
- When sets \( X_i \) are points, reduces to standard LP formulation of the shortest path (known to be tight).
- There are instances of this problem that are NP-hard.
- We give simple examples where relaxation is not tight.
- Can add (piecewise-affine) dynamic constraints on pairs \( (x_i,x_j). \)
Remarks
Example: "Footstep planning" with \(x_{n+1}=Ax_n + Bu_n\)

| Previous best formulations | New formulation | |
|---|---|---|
| Lower Bound (from convex relaxation) |
7% of MICP | 80% of MICP |
Formulating motion planning with differential constraints as a Graph of Convex Sets (GCS)





+ time-rescaling
\begin{aligned}
\min \quad & a T + b \int_0^T |\dot{q}(t)|_2 \,dt + c \int_0^T |\dot{q}(t)|_2^2 \,dt \\
\text{s.t.} \quad
& q \in \mathcal{C}^\eta, \\
& q(t) \in \bigcup_{i \in \mathcal{I}} \mathcal{Q}_i, && \forall t \in [0,T], \\
& \dot q(t) \in \mathcal{D}, && \forall t \in [0,T], \\
& T \in [T_{min}, T_{max}], \\
& q(0) = q_0, \ q(T) = q_T, \\
& \dot q(0) = \dot q_0, \ \dot q(T) = \dot q_T.
\end{aligned}
duration
path length
path "energy"
note: not just at samples
continuous derivatives
collision avoidance
velocity constraints


minimum distance
minimum time
Transcription to a mixed-integer convex program, but with a very tight convex relaxation.
- Solve to global optimality w/ branch & bound orders of magnitude faster than previous work
- Solving only the convex optimization (+rounding) is almost always sufficient to obtain the globally optimal solution.

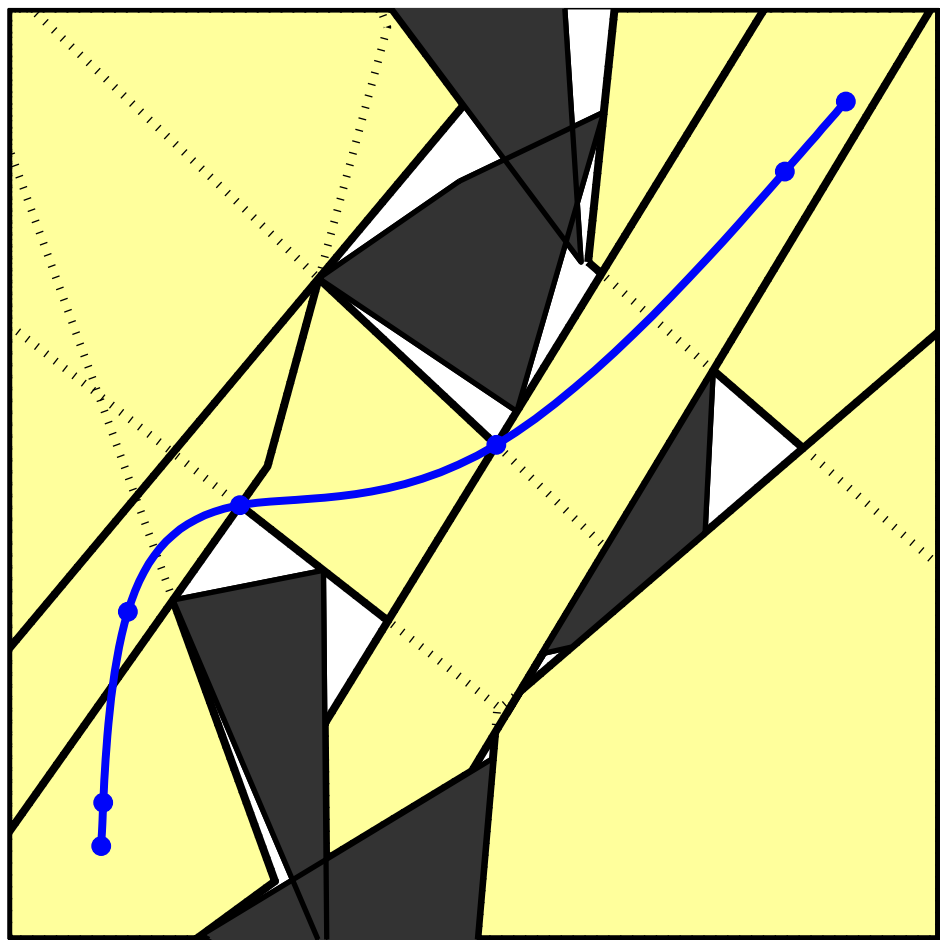
But how did we get the convex regions?

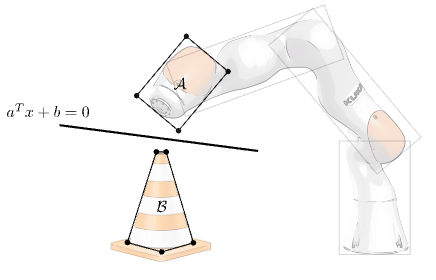
IRIS (Fast approximate convex segmentation). Deits and Tedrake, 2014
- Iteration between (large-scale) quadratic program and (relatively compact) semi-definite program (SDP)
- Scales to high dimensions, millions of obstacles
- ... enough to work on raw sensor data
Configuration-space regions
- Original IRIS algorithm assumed obstacles were convex
- Two new extensions for C-space:
- Nonlinear optimization for speed
- Sums-of-squares for rigorous certification
q_1
q_2
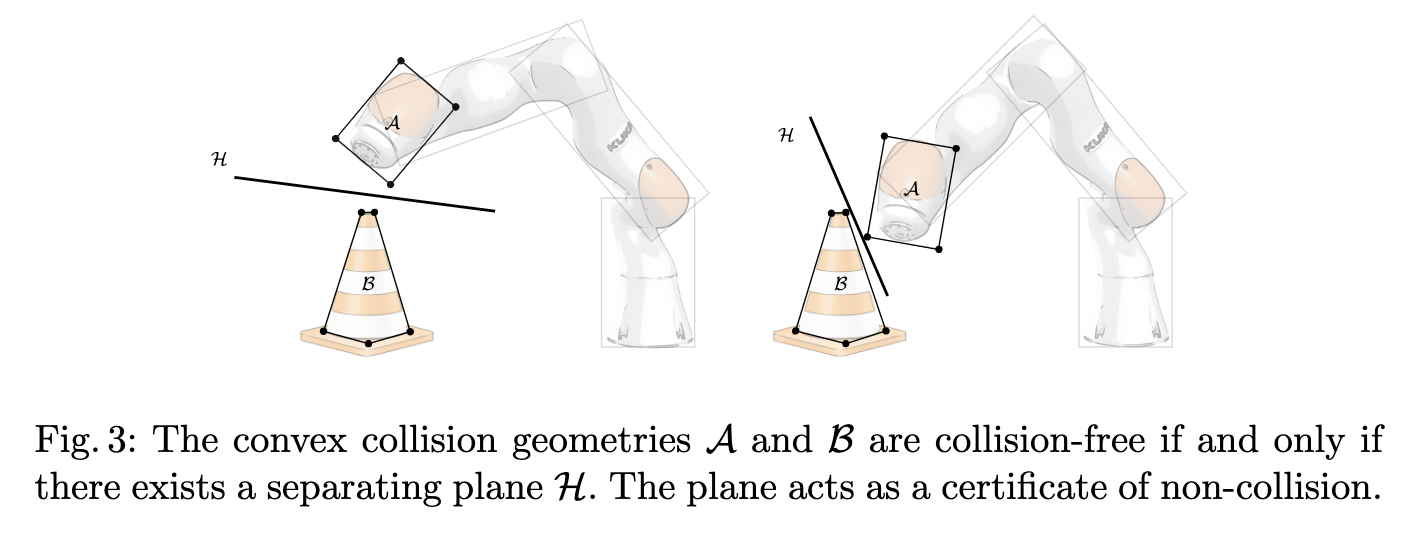
Sums-of-Squares formulation
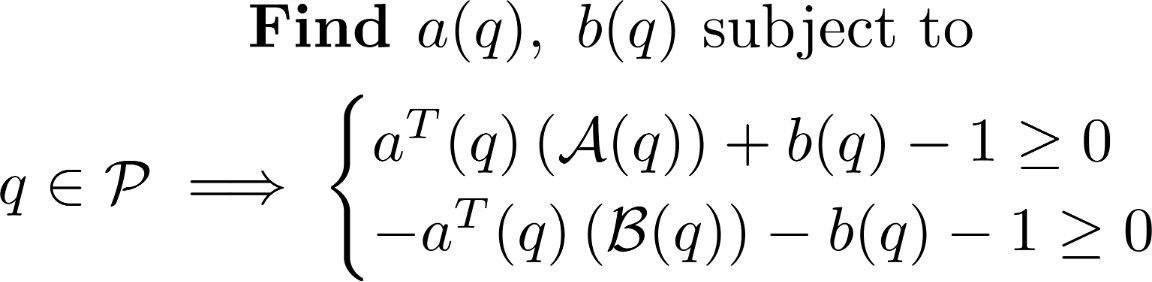

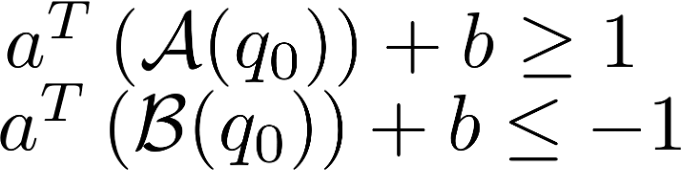

Solve using rational polynomial kinematics
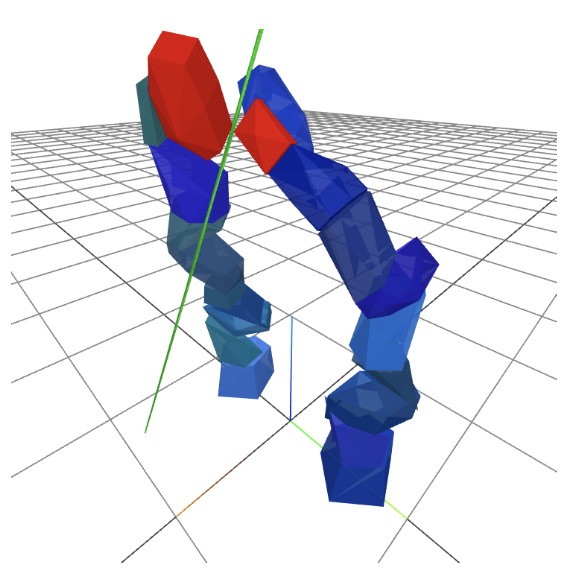
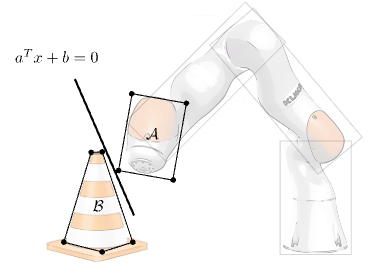
The separating plane (green) is the non-collision certificate between the two highlighted polytopic collision geometries (red), with a distance of 7.3mm.
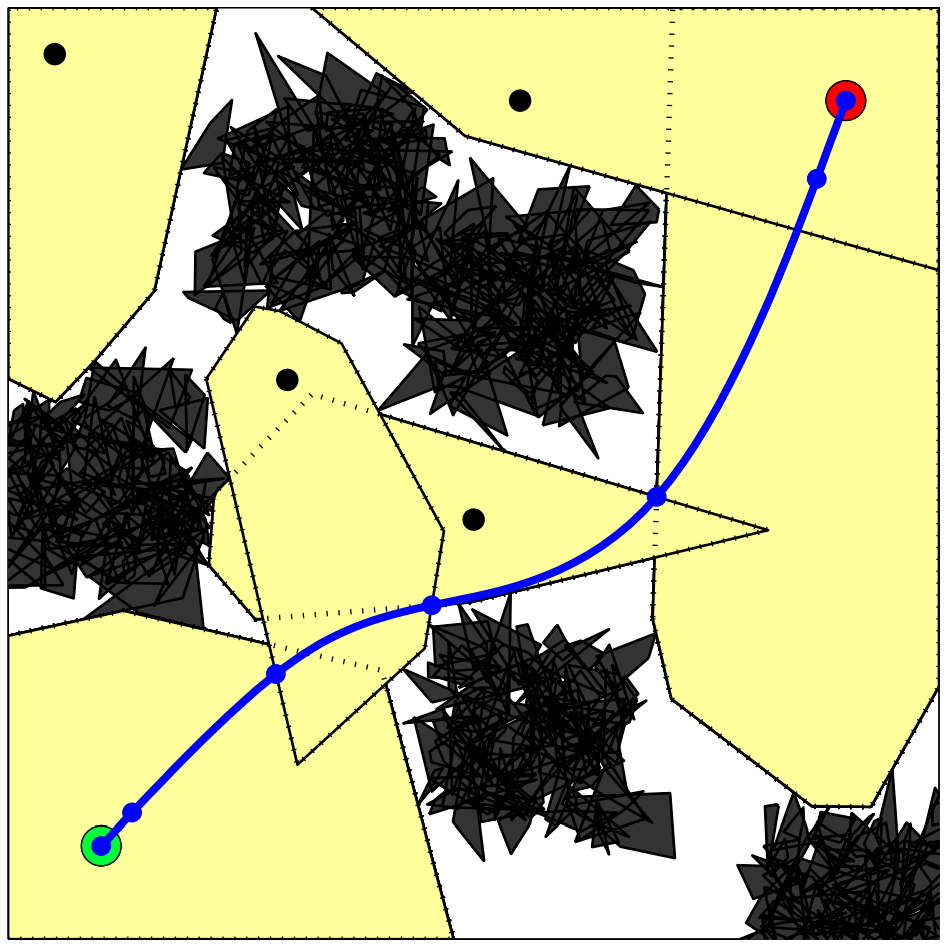
Graph of Convex Sets (GCS)
PRM
PRM w/ short-cutting
Preprocessor makes easy optimizations fast!


Geometry Problems
- We don't yet understand rigorously what defines optimal convex decompositions for this planner
- closely related to the maximum vertex hidden set problem and visibility graphs
- subtle costs/benefits of overlapping regions
- subtle trade-offs between coverage and complexity of the sets
- closely related to the maximum vertex hidden set problem and visibility graphs

Extensions to Non-Euclidean spaces
- Constrain IRIS regions with geodesic convexity
- Assign a chart to each vertex
- Pullbacks define all of the natural changes of coordinates
with Tommy Cohn, Mark Petersen, and Max Simchowitz
Beyond collision-free motion planning
I've focused today on Graphs of convex sets (GCS) for motion planning
GCS is a more general modeling framework
- already orders of magnitude faster for a number of mixed-combinatorial continuous problems (e.g. TSP w/ neighborhoods)
- For control
- Linear quadratic regulator model-predictive control (LQR MPC)
- extends naturally to piecewise affine systems
Planning through contact
Planning through contact
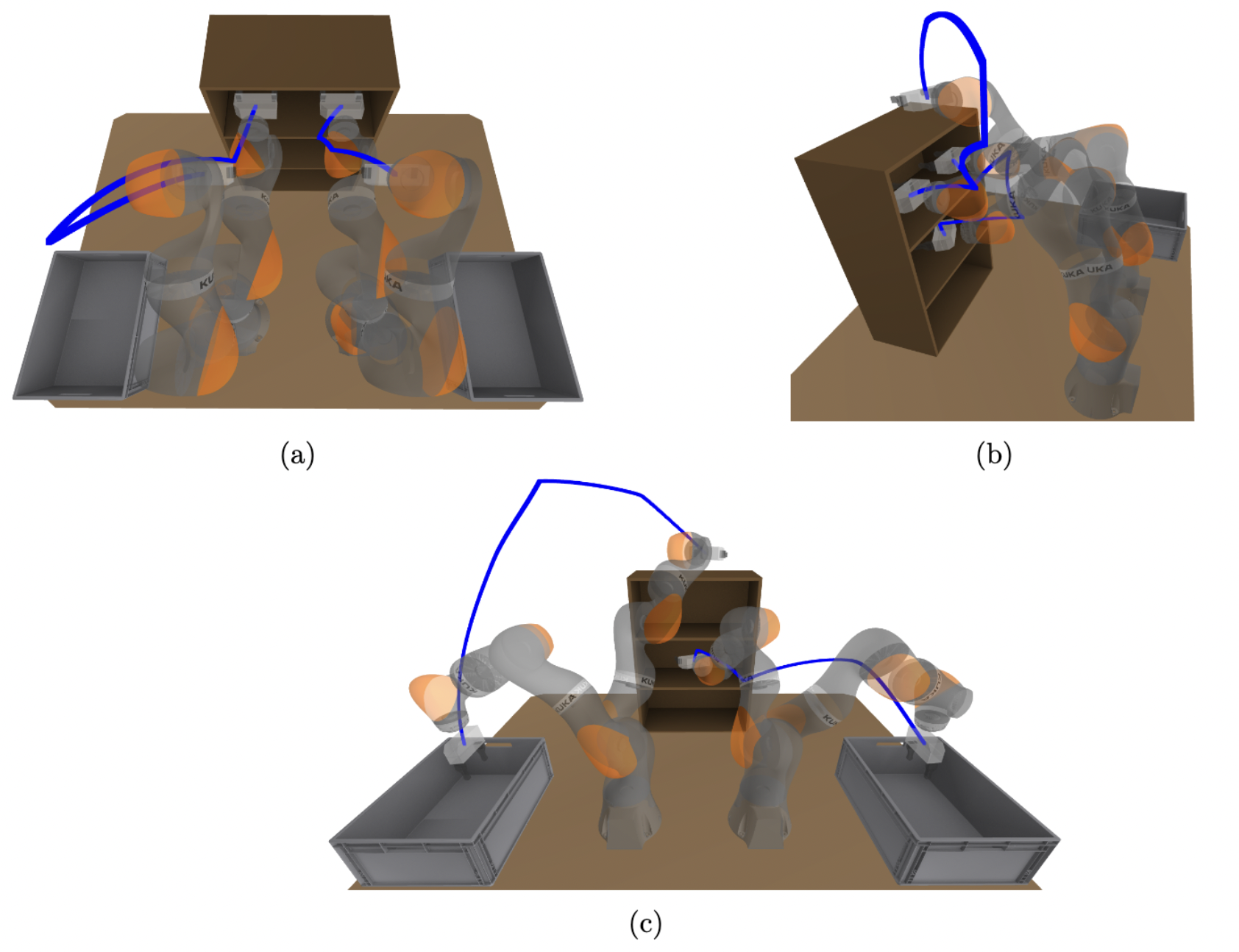
Task and motion planning
GCS version (top down)
Task and motion planning with GCS
Prelimary results by Savva Morozov
As a motion planning tool
This is version 0.1 of a new framework.
- Already competitive (better paths faster; higher DOF; supports differential constraints)
- We've provided a mature implementation
There is much more to do, for example:
- Add support for additional costs / constraints
- Dynamic collision geometry / moving obstacles
- GCS can warm-start well
- Working on a custom solver with Stephen Boyd
Scaling
-
~10k regions in 3D
-
20k vertices and 400k edges.
- Online planning takes 0.3s
by Tobia Marcucci in collaboration w/ Stephen Boyd

Summary
- New strong mixed-integer convex formulation for shortest path problems over convex regions
- Immediate applications in manipulator planning at dynamic limits
- Foundation models for control?
- Have not yet seen zero-shot generalization in manipulation
- Stronger planners \(\Rightarrow\) less human demonstrations
Give it a try:
pip install drake
sudo apt install drakeGoal #2: Deeper connections between
Trajectory optimization
Sample-based planning
AI-style logical planning
Combinatorial optimization
Online classes (videos + lecture notes + code)
http://manipulation.mit.edu
http://underactuated.mit.edu
Shortest Paths in Graphs of Convex Sets.
Tobia Marcucci, Jack Umenberger, Pablo Parrilo, Russ Tedrake.
Available at: https://arxiv.org/abs/2101.11565
Motion Planning around Obstacles with Convex Optimization.
Tobia Marcucci, Mark Petersen, David von Wrangel, Russ Tedrake.
Available at: https://arxiv.org/abs/2205.04422
"Hydroelastic contact" as implemented in Drake
Copy of Motion Planning around Obstacles with Graphs of Convex Sets
By Bernhard Paus Græsdal
Copy of Motion Planning around Obstacles with Graphs of Convex Sets
Columbia Mechanical Engineering Seminar


