













Kevin Song
I'm a student at UT (that's the one in Austin) who studies things.
Kevin Song
2024-12-09
© Koshu Endo, GeoJapanCorporation 2014
Robert Brown, for whom this motion is named, initially thought that this was due to a driving life force.
Repeated experiments with coal dust showed that this was not the case.
Fuel
Living Thing
Entropy
Entropy
Entropy
Work
Fuel (Food)
Living Thing
Entropy
Entropy
Entropy
Work
This definition has several downsides: for example, cars and fires are considered "alive".
But it has enough utility in other situations (not just alive/not-alive decisions) that we'll use it for this talk.
The second law of thermodynamics says that entropy increases over time.
Would like to quantify how irreversible a process is!
Can be mathematically described by a stochastic process.
A set of random variables indexed by a time variable \(i \in \mathcal{T}\), with outcome space \(\mathcal{X}\).
denotes that \(x\) is sampled from the stochastic process \(\{X_t\}\) (brackets dropped for simplicity).
Most of the time, we do not know the actual probabilities of the stochastic process (i.e. \(\{X_t\}\) is hidden).
Space of first frame of ink-mixing videos
Space of all ink-mixing videos
Space of second frame of ink mixing videos
A specific first frame of an ink mixing video
A specific second frame of an ink mixing video
A specific ink mixing video (multiple frames)
A superscript \(\tau\) on a stochastic process denotes the length-\(\tau\) prefix of that process.
Physically, means "stopping the clock" after \(\tau\) time.
We often use formulas that require us to sum over all possible realizations of a stochastic process, e.g.
When possible, I'll instead write this:
We denote the time-reversal of a stochastic process \(X_t\) by \(\theta(X_t)\).
Example:
Jarzynski, C. 1997. “Nonequilibrium Equality for Free Energy Differences.” Physical Review Letters 78 (14): 2690.
Crooks, G. E. 1999. “Entropy Production Fluctuation Theorem and the Nonequilibrium Work Relation for Free Energy Differences.” Physical Review. E. 60 (3): 2721–26.
Kawai, R., J. M. R. Parrondo, and C. Van den Broeck. 2007. “Dissipation: The Phase-Space Perspective.” Physical Review Letters 98 (8): 080602.
A significant line of work started by Jarzynski and Crooks in the late 90s leads to the following definition of entropy production:
Sanity check: more KLD = more entropy production
We can use this to massively simplify the evaluation of this formula!
A stochastic process is Markov (or has the Markov property) iff
This says that each random variable only depends on the previous one.
Markov
Not Markov!
If process is Markov, the probability of seeing \(x_1\) after \(x_0\) only depends on \(x_0\).
The probability of seeing \(x_2\) after \(x_1\) only depends on \(x_1\).
If process is Markov, the probability of seeing \(x_1\) after \(x_0\) only depends on \(x_0\).
The probability of seeing \(x_2\) after \(x_1\) only depends on \(x_1\).
Instead of having to estimate joint probabilities, we only have to estimate pairwise probabilities!
If process is Markov, the probability of seeing \(x_1\) after \(x_0\) only depends on \(x_0\).
The probability of seeing \(x_2\) after \(x_1\) only depends on \(x_1\).
Suppose \(\mathcal{X} = \{1,2,3\}\) and our system is Markov. Let's pull a very long sample from \(\theta(X_t)\).
We will see certain transitions (e.g. \(\color{orange}1\color{black} \rightarrow \color{green}2\)) with a certain probability \(p\).
We will see certain transitions (e.g. \(\color{orange}1\color{black} \rightarrow \color{green}2\)) with a certain probability \(p\).
We will see certain transitions (e.g. \(\color{orange}1\color{black} \rightarrow \color{green}2\)) with a certain probability \(p\).
If we reverse this sample, we get a sample from \(X_t\).
We will see certain transitions (e.g. \(\color{orange}1\color{black} \rightarrow \color{green}2\)) with a certain probability \(p\).
If we reverse this sample, we get a sample from \(X_t\).
We will see certain transitions (e.g. \(\color{orange}1\color{black} \rightarrow \color{green}2\)) with a certain probability \(p\).
Note that \( \color{green}2\color{black} \rightarrow \color{orange}1 \) occurs with the same frequency in \(X_t\) as \(\color{orange}1\color{black} \rightarrow \color{green}2\) occurs in \(\theta(X_t)\).
If we reverse this sample, we get a sample from \(X_t\).
1. All probabilities factors into pairwise conditional probabilites
2. We can explicitly compute probabilities in \(p(\theta(X_t^\tau = x))\)
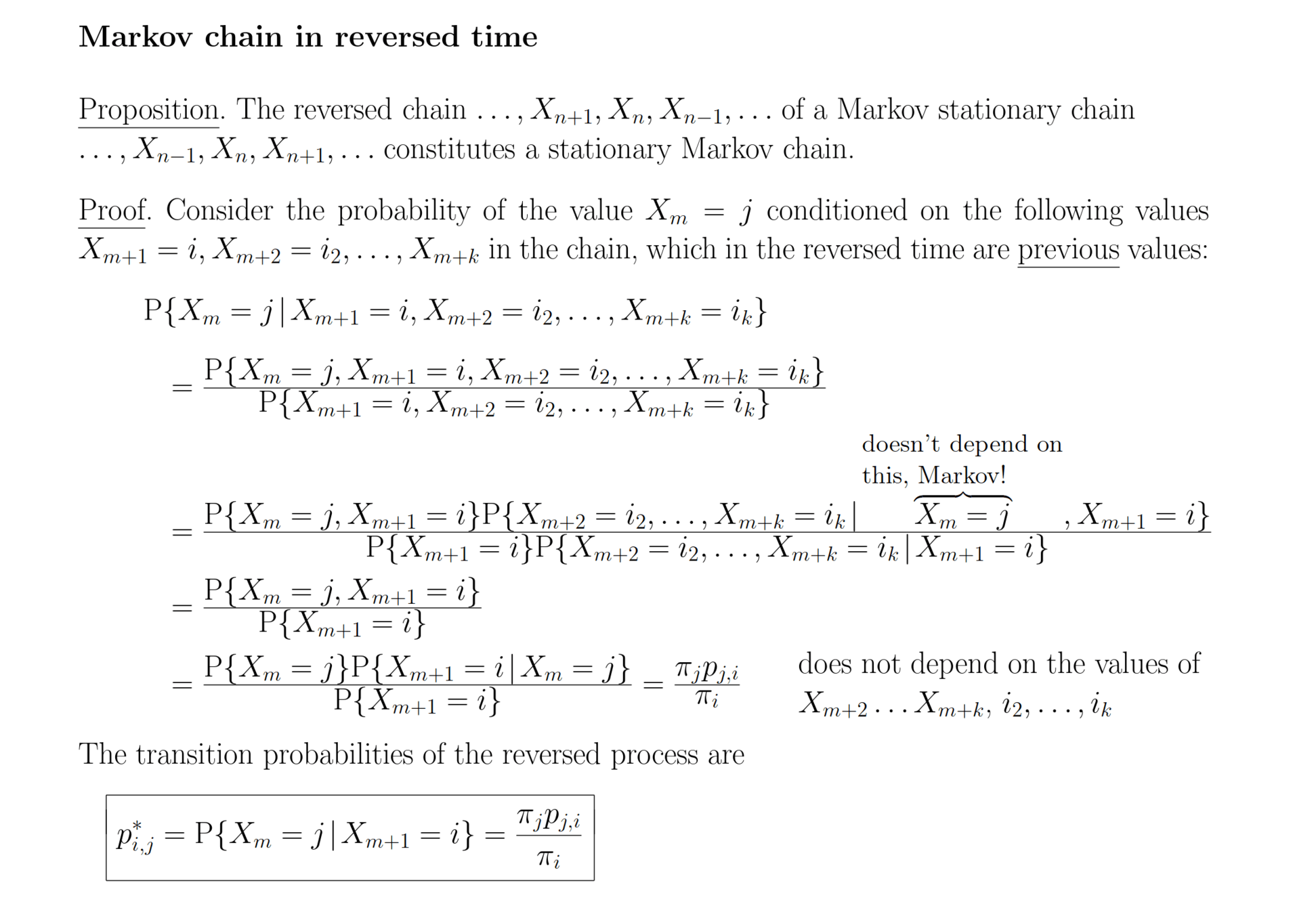
where \(p_{ij}\) is the probability to do a transition, and \(\pi_j\) is the probability of being in state \(j\) at a random point in time.
In practice, we usually cannot obtain samples from \(X_t\).
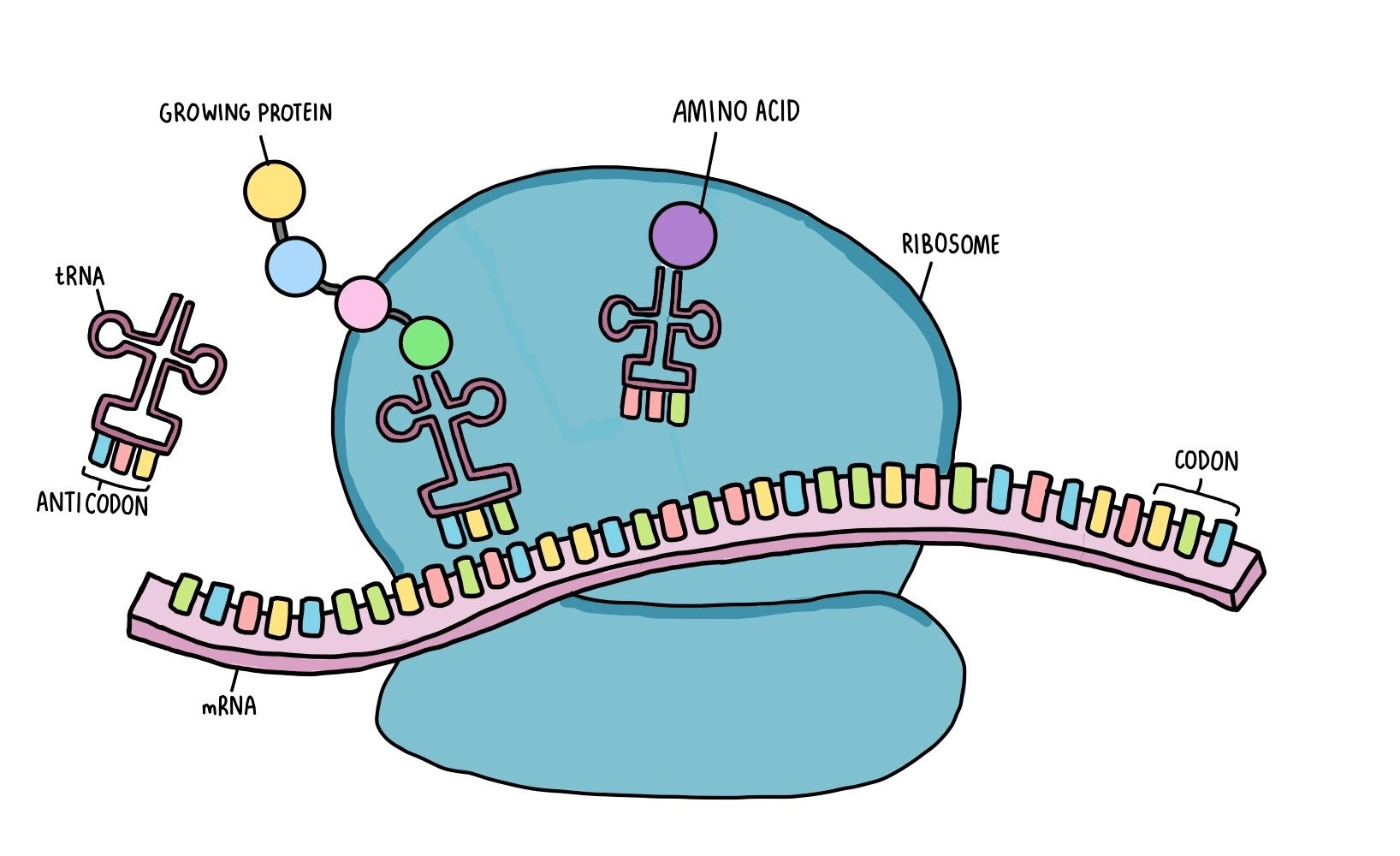
Given this image, we might say a reasonable model for the translation process is a linear chain of states (RNA) and the region currently in the ribosome.
But RNA is really small! We can't accurately resolve which bases are being read.
\(\approx\) 150 bases
Camera View
True System
Camera View
True System
Camera View
True System
Camera View
True System
Camera View
True System
Now that we've just seen a state change on the camera, are we more likely to see the particle continue through to the next state, or return to the old state?
Camera View
True System
Now that we've just seen a state change on the camera, are we more likely to see the particle continue through to the next state, or return to the old state?
Camera View
True System
Now that we've just seen a state change on the camera, are we more likely to see the particle continue through to the next state, or return to the old state?
Continue through
Camera View
True System
Now that we've just seen a state change on the camera, are we more likely to see the particle continue through to the next state, or return to the old state?
Continue through
Return
Camera View
True System
Now that we've just seen a state change on the camera, are we more likely to see the particle continue through to the next state, or return to the old state?
Continue through
Return
Appears that particle remembers its old state. But this is non-Markov!
Thesis chapters 2-4 cover how to detect if \(Y_t\) is non-Markov and give one way to quantify its degree of non-Markovianity.
Sneak peek: chapter 5 solves this problem in certain systems by discarding additional information from the coarse-grained observations.
But doesn't tell us what to do instead!
Barato, Andre C., and Udo Seifert. 2015. “Thermodynamic Uncertainty Relation for Biomolecular Processes.” Physical Review Letters 114 (April): 158101.
Intuition: molecular systems tend to look very random. The less random they look, the stronger a hidden driving force must be.
The original TUR was only proven correct on discrete unicyclic systems, but various extensions have been developed for hierachical coarse-graining, continuous systems, etc.
Secondary downside: behavior of bounds not well understood under coarse-graining (Knotz 2024).
The Kullback-Leibler Divergence is more common in information theory and machine learning.
Suppose I draw some observations \(x_1 \dots x_n \sim X\). I want to transmit these observations to someone else.
I need to use some minimum number of bits to transmit these \(n\) observations. What is this minimum?
Requires \(N H(X)\) bits!
Suppose I draw some observations \(x_1 \dots x_n \sim X\). I want to transmit these observations to someone else.
I need to use some minimum number of bits to transmit these \(n\) observations. What is this minimum?
Requires \(N H(X)\) bits!
Now suppose I draw \(\color{red}y_1 \dots y_n \sim Y\). How many bits do I need to transmit these observations if I use a code which is optimal for \(X\)?
Number of bits needed to encode \(Y\) using a code for \(X\).
Number of bits needed to encode \(Y\) using a code for \(Y\).
Now suppose I draw \(\color{red}y_1 \dots y_n \sim Y\). How many bits do I need to transmit these observations if I use a code which is optimal for \(X\)?
Number of bits needed to encode \(Y\) using a code for \(X\).
Number of bits needed to encode \(Y\) using a code for \(Y\).
Goal: Encode \(Y\) using phrases from \(X\).
Ziv, J., and N. Merhav. 1993. “A Measure of Relative Entropy between Individual Sequences with Application to Universal Classification.” IEEE Transactions on Information Theory / Professional Technical Group on Information Theory 39 (4): 1270–79.
Using this encoding of \(y\), we can estimate \(H(Y, X)\).
1. Draw sample from \(X_t\).
1. Draw sample from \(X_t\).
2. Reverse to obtain sample from \(\theta(X_t)\).
1. Draw sample from \(X_t\)
2. Reverse to obtain sample from \(\theta(X_t)\)
3. Compute Ziv-Merhav cross parse and estimate \(H(X, \theta(X))\)
1. Draw sample from \(X_t\)
2. Reverse to obtain sample from \(\theta(X_t)\)
3. Compute Ziv-Merhav cross parse and estimate \(H(X, \theta(X))\)
4. Estimate \(H(X_t)\) using methods discussed in Chapter 2 of thesis.
1. Draw sample from \(X_t\)
2. Reverse to obtain sample from \(\theta(X_t)\)
3. Compute Ziv-Merhav cross parse and estimate \(H(X, \theta(X))\)
4. Estimate \(H(X_t)\) using methods discussed in Chapter 2 of thesis.
4. Combine these two quantities to estimate \(D_{KL}\).
1. Draw sample from \(X_t\)
2. Reverse to obtain sample from \(\theta(X_t)\)
3. Compute Ziv-Merhav cross parse and estimate \(H(X, \theta(X))\)
4. Estimate \(H(X_t)\) using methods discussed in Chapter 2 of thesis.
4. Combine these two quantities to estimate \(D_{KL}\).
5.Plug this estimate into the formula for entropy production.
A Markov model where we don't get to explicitly see the state.
1
2
3
4
Bouguila, Nizar, Wentao Fan, and Manar Amayri, eds. 2022. Hidden Markov Models and Applications. 1st ed. Unsupervised and Semi-Supervised Learning. Cham, Switzerland: Springer Nature.
1
A
A Markov model where we don't get to explicitly see the state.
1
2
3
4
Bouguila, Nizar, Wentao Fan, and Manar Amayri, eds. 2022. Hidden Markov Models and Applications. 1st ed. Unsupervised and Semi-Supervised Learning. Cham, Switzerland: Springer Nature.
12
AA
A Markov model where we don't get to explicitly see the state.
1
2
3
4
Bouguila, Nizar, Wentao Fan, and Manar Amayri, eds. 2022. Hidden Markov Models and Applications. 1st ed. Unsupervised and Semi-Supervised Learning. Cham, Switzerland: Springer Nature.
121
AAB
A Markov model where we don't get to explicitly see the state.
1
2
3
4
Bouguila, Nizar, Wentao Fan, and Manar Amayri, eds. 2022. Hidden Markov Models and Applications. 1st ed. Unsupervised and Semi-Supervised Learning. Cham, Switzerland: Springer Nature.
1212
AABA
A Markov model where we don't get to explicitly see the state.
1
2
3
4
Bouguila, Nizar, Wentao Fan, and Manar Amayri, eds. 2022. Hidden Markov Models and Applications. 1st ed. Unsupervised and Semi-Supervised Learning. Cham, Switzerland: Springer Nature.
1212
AABA
| State | P("A") | P("B") |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 |
1
2
3
4
AABBAB
| State | P("A") | P("B") |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 |
Graph given to algorithm
Actual Graph
1
2
3
4
3
2
1
4
5
| Method | Advantage | Disadvantage |
|---|---|---|
| TUR | Straightforward to apply Fast |
Only provides lower bound |
| Ziv-Merhav | No parameters to set or guess | Computationally expensive, convergence not guaranteed |
| HMM | Easy to understand result Very well-established algorithms |
If wrong graph provided to algorithm, results may be garbage |
| Markov Formula | Fast, easy,correct | Cannot be used when data is non-Markov |
Blom, Kristian, Kevin Song, Etienne Vouga, Aljaž Godec, and Dmitrii E. Makarov. 2024. “Milestoning Estimators of Dissipation in Systems Observed at a Coarse Resolution.” Proceedings of the National Academy of Sciences of the United States of America 121 (17): e2318333121.
Milestoning Estimators of Dissipation in Systems Observed at a Coarse Resolution
Joint work with Kristian Blom, Aljaž Godec, Dmitrii Makarov, and Etienne Vouga, published in PNAS.
?
?
?
?
?
?
In my proposal, I discussed a technique called milestoning. It allowed us to make highly non-Markov systems look Markov while preserving important elements of the behavior.
We're going to use this technique again for entropy production estimation, but it's going to look slightly different in a discrete system.
= pixel
= milestone pixel
We are given a system which is already lumped. We can only tell which lump(pixel) a particle is in, not the microscopic state.
1
2
3
4
5
6
7
8
9
We (the data analysis team) designate several lumps(pixels) as milestones.
1
2
3
4
5
6
7
8
9
= pixel
= milestone pixel
In the milestoned trajectory, we only record a milestone state if this is the first time at this milestone since visiting a different milestone.
1
2
3
4
5
6
7
8
9
= pixel
= milestone pixel
In the milestoned trajectory, we only record milestone states, and only if this is the first time at this milestone since visiting a different milestone.
1
2
3
4
5
6
7
8
9
4
4
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5
4
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5
4
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5
4
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6
4 6
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6 5
4 6
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6 5 6
4 6
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6 5 6
4 6
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6 5 6
4 6
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6 5 6 7
4 6
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6 5 6 7 6
4 6
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6 5 6 7 6
4 6
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6 5 6 7 6
4 6
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6 5 6 7 6 5
4 6
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6 5 6 7 6 5 6
4 6
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6 5 6 7 6 5 6 5
4 6
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6 5 6 7 6 5 6 5
4 6
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6 5 6 7 6 5 6 5
4 6
= pixel
= milestone pixel
1
2
3
4
5
6
7
8
9
4 5 6 5 6 7 6 5 6 5 4
4 6 4
= pixel
= milestone pixel
Lumps (i.e. pixels or other coarse-graining units) are usually fixed by experimental limitations. Milestones are chosen during data processing.
Where transition probabilities \(p\) are estimated directly from the data, either using a lumped trace or a lumped + milestoned trace.
4 5 6 5 6 7 6 5 6 5 4
4 6 4
| 1 | |
4 5 6 5 6 7 6 5 6 5 4
4 6 4
| 2 | |
4 5 6 5 6 7 6 5 6 5 4
4 6 4
| 2 | |
| 1 | |
4 5 6 5 6 7 6 5 6 5 4
4 6 4
| 3 | |
| 1 | |
4 5 6 5 6 7 6 5 6 5 4
4 6 4
| 5 | |
| 4 | |
4 5 6 5 6 7 6 5 6 5 4
4 6 4
| 5 | |
| 4 | |
| 1 | |
4 5 6 5 6 7 6 5 6 5 4
4 6 4
| 5 | |
| 4 | |
| 1 | |
4 5 6 5 6 7 6 5 6 5 4
4 6 4
| 5 | |
| 4 | |
| 2 | |
| 2 |
| 5 | |
| 4 | |
| 2 | |
| 2 |
4 5 6 5 6 7 6 5 6 5 4
| 5 | |
| 4 | |
| 2 | |
| 2 |
| 5 | |
| 4 | |
| 2 | |
| 2 |
4 5 6 5 6 7 6 5 6 5 4
| 5 | |
| 4 | |
| 2 | |
| 2 |
| 0.55 | |
| 0.44 | |
| 0.22 | |
| 0.22 |
4 5 6 5 6 7 6 5 6 5 4
| 5 | |
| 4 | |
| 2 | |
| 2 |
| 0.55 | |
| 0.44 | |
| 0.22 | |
| 0.22 |
\(Q\): Ratio of estimated entropy production to true entropy production.
Ideally, \(Q = 1.0\).
Chapter 5 of the thesis discusses additional results that demonstrate how removing information can result in better entropy production estimates, including:
Information-theoretical limit on the estimates of dissipation by molecular machines using single-molecule fluorescence resonance energy transfer experiments
Joint work with Dmitrii Makarov, and Etienne Vouga, published in JCP
Song, Kevin, Dmitrii E. Makarov, and Etienne Vouga. 2024. “Information-Theoretical Limit on the Estimates of Dissipation by Molecular Machines Using Single-Molecule Fluorescence Resonance Energy Transfer Experiments.” The Journal of Chemical Physics 161 (4): 044111.
Chapter 6 of thesis
Instead, if we want to track (some limited) information about positions over time, we can use Förster resonance energy transfer (FRET).
Some complex physics (including a term that scales as \(x^6\), but a very straightforward interpretation.
Our goal will be to predict the entropy production of the walker.
We have a flashbulb which goes off at random times.
We can control how often this light flashes per second (on average) with a system parameter \(\mu\).
Every time the flashbulb goes off, we see the color of the state, but not what state it came from.
Time
The system could have transitioned from orange to purple to green here, but we can't see it because our flashbulb didn't go off!
Given this photon sequence, how can we estimate the entropy production of the walker?
The same single-file diffusion process from earlier, but now we can only observe photon colors!
When the light flashes, we see the color of the site this walker is on.
We cannot observe this walker at all.
We call the HMM estimates using the wrong model the "MLE" estimate.
...in the thesis.
Throughout my PhD, I have exploited these connections to make various inference algorithms for molecular systems.
| Chapter 2 | Using compression as an entropy rate estimator to infer coarse-graining |
| Chapter 4 | Extending Chapter 2 to continuous-space systems by careful discretization of the state space |
| Chapter 5 | Using the representations of Chapter 4 to improve estimates of entropy production rate |
| Chapter 6 | Estimating entropy rates by various means (including compression) when the state cannot be seen |
Fine Grained
Coarse Grained
Zero Entropy Production
Positive Entropy Production
Fine Grained
Coarse Grained
Zero Entropy Production
Positive Entropy Production
Fine Grained
Coarse Grained
Zero Entropy Production
Positive Entropy Production
Fine Grained
Coarse Grained
Zero Entropy Production
Positive Entropy Production
Fine Grained
Coarse Grained
Zero Entropy Production
Positive Entropy Production
If we can show that these do not exist, then any entropy production exhibited by a coarse-grained system must be real!
Fine Grained
Coarse Grained
Zero Entropy Production
Positive Entropy Production
We want to write down this system in a manner that is invariant to rigid transforms.
Avinery, Ram, Micha Kornreich, and Roy Beck. 2019. “Universal and Accessible Entropy Estimation Using a Compression Algorithm.” Physical Review Letters 123 (17): 178102.
These two representations give different answers....but the physics of a system should not depend on the representation used to write it down!
Time
This looks like it started in the orange state, transitioned through the mixed state, and ended in the purple state....but did it?
Time
Time
Time
By more carefully analyzing the Markov condition, we find that we cam also reverse the variable dependencies.
Time
By more carefully analyzing the Markov condition, we find that we cam also reverse the variable dependencies.
Time
Time
Consider a particle moving around. At each instant in time, we capture its position and momentum.
Consider a particle moving around. At each instant in time, we capture its position and momentum.
Consider a particle moving around. At each instant in time, we capture its position and momentum.
Consider a particle moving around. At each instant in time, we capture its position and momentum.
Consider a particle moving around. At each instant in time, we capture its position and momentum.
Consider a particle moving around. At each instant in time, we capture its position and momentum.
Consider a particle moving around. At each instant in time, we capture its position and momentum.
Consider a particle moving around. At each instant in time, we capture its position and momentum.
Consider a particle moving around. At each instant in time, we capture its position and momentum.
However, even if we assume that cycles like these are not completely hidden by coarse-graining, it still introduces other challenges.
Lumping of cycles introduces non-Markov behavior, as we have already seen.
will become
Easy (low entropy)
Hard (high entropy)
"How hard is it to guess what happens?"
,
,
Let's say we repeat this process \(N\) times. How many bits do we need to send over the wire?
Let's say we repeat this process \(N\) times. How many bits do we need to send over the wire?
Shannon's source coding theorem
\( H(X) \) bits per observation
If transmitting \(N\) observations from a process with entropy \(H(X)\), we cannot use fewer than \(N H(X)\) bits.
No compression scheme can use fewer than \(N H(X)\) bits, else we could violate the source coding theorem.
Generally, optimal codes use shorter representations for more frequent symbols and longer representations for less frequent symbols.
,
,
minimum number of bits
penalty for using a code optimized for \(X\) when we were actually transmitting \(Y\)
Can be estimated just by compressing \(Y\) using any compression algorithm.
Estimated by using a special cross-parse algorithm.
= standard lump
= milestone lump
= standard lump
= milestone lump
The particle just entered a milestone. What is the probability of it returning to its previous milestone versus continuing to the next one?
= standard lump
= milestone lump
6 sites
= standard lump
= milestone lump
6 sites
4 sites
= standard lump
= milestone lump
The particle just entered a milestone. What is the probability of it returning to its previous milestone versus continuing to the next one?
= standard lump
= milestone lump
The particle just entered a milestone. What is the probability of it returning to its previous milestone versus continuing to the next one?
12 sites
= standard lump
= milestone lump
The particle just entered a milestone. What is the probability of it returning to its previous milestone versus continuing to the next one?
12 sites
10 sites
= standard lump
= milestone lump
12 sites
10 sites
= standard lump
= milestone lump
In the limit of infinite distance, we recover the original process. See Section 5.4 for details.
Milestones and lumps both create an additional piece we haven't talked about: waiting times.
TIME
Milestone
Lump
A
B
1
A
B
C
2
B
A
1
B
C
2
D
3
Unequal times between milestone crossings!
Waiting times can also contribute to entropy production, e.g. if waiting times systematically increase, this creates an asymmetry in the forward/backward processes.
In the system presented here, we show (cf. Section 5.5) that in this case, we must ignore the waiting times in order to obtain the correct entropy production.
However, in other systems studied in the literature (Martínez et. al.), the waiting times do contribute to entropy production.
Martínez, Ignacio A., Gili Bisker, Jordan M. Horowitz, and Juan M. R. Parrondo. 2019. “Inferring Broken Detailed Balance in the Absence of Observable Currents.” Nature Communications 10 (1): 3542.
By Kevin Song



