




cirquit
PhD student with a focus on machine learning, distributed systems and functional programming.
Introduction
1
Adrian, Jonathan, Alexander
Introduction
2
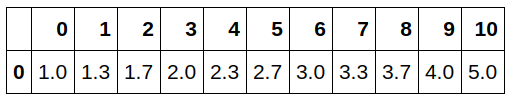
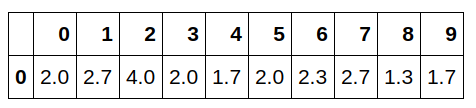
Grading system:
Values:
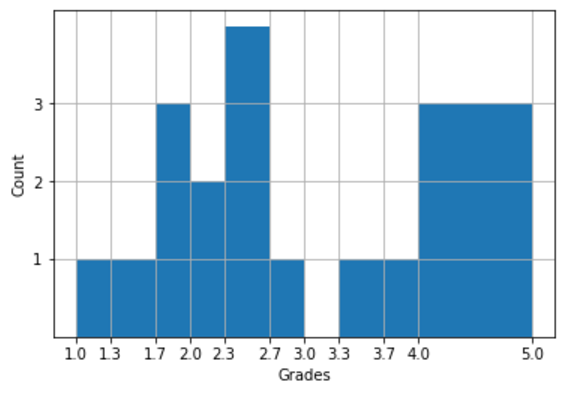
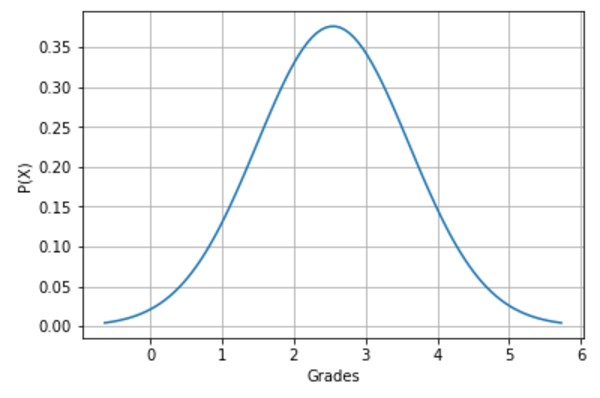
Gauss Distribution
3
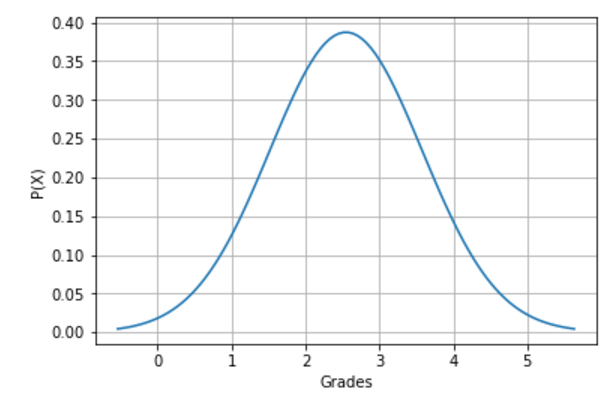
Gauss Distribution
4
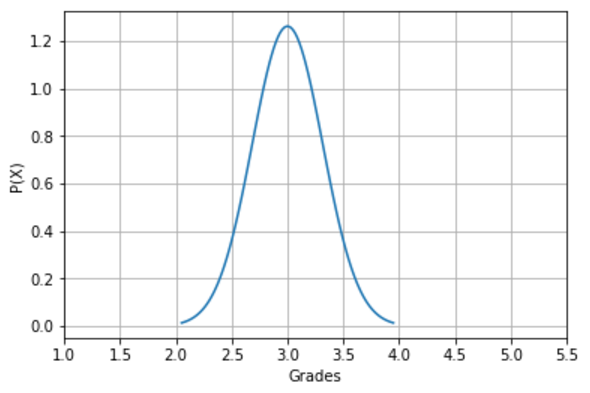
Gauss Distribution
5
Gauss Distribution
6
Gauss Distribution
7
Gauss Distribution
8
Gauss Distribution
9
Gauss Distribution
10
Gauss Distribution
11
Gauss Distribution
12
Gauss Distribution
13
Basic Physics Formulae
By cirquit




