Tecnología 4º E.S.O.
Departamento Científico-Tecnológico
C.P.E.B. Aurelio Menéndez - Ibias
Febrero 2021
Unidad Didáctica 3.
Electrónica Analógica

Qué vamos a aprender...
- Conceptos básicos
- Circuitos electrónicos.
- Componentes pasivos
- Resistencias
- Condensadores
- Semiconductores
- Receptores activos
- Diodos
- Transistores
Conceptos básicos
Conceptos básicos
- Electrónica
- Corriente eléctrica
- Sentido de la corriente
- One
- Bullet Two
- Bullet Three
Title Text
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Morbi nec metus justo. Aliquam erat volutpat.
Electrónica
Rama de la ciencia que estudia los circuitos que permiten modificar la corriente eléctrica y que aplica la electricidad al tratamiento de la información. Posibles modificaciones:
- Amplificar
- Atenuar
- Rectificar
- Filtrar
Corriente eléctrica
Flujo de electrones a través de un material conductor, desde un cuerpo con carga negativa a otro con carga positiva (de exceso de electrones a déficit de electrones)
Sentido de corriente
Por convenio: sentido contrario al flujo de electrones.
Sentido corriente
Por convenio: sentido contrario al flujo de electrones.
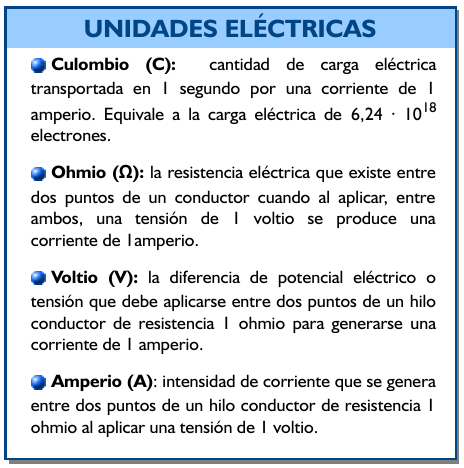
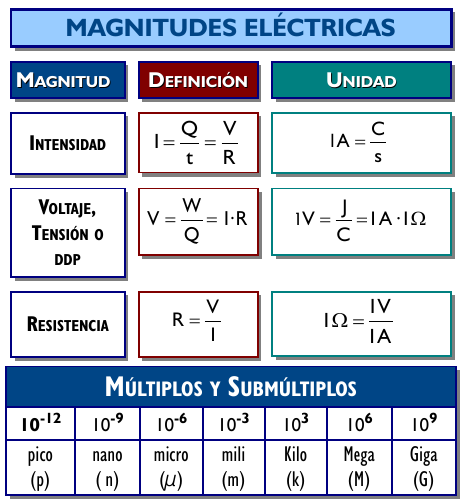
Cantidad carga (Q)
Carga total que circula a través de un circuito eléctrico.
En el S... se emplea como unidad de carga el Culombio, C=6.24 10e18, ya que la carga de un electrón es muy pequeña.
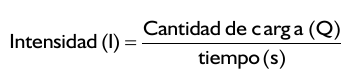
Intensidad corriente (I)
Cantidad de carga (Q) transportada por unidad de tiempo (t).
Unidad: Amperio
Se mide con el amperímetro o el polímetro.
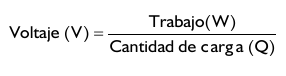
Voltaje (V)
Trabajo a realizar para transportar una carga positiva entre dos puntos.
Unidad: Voltio (V)
Se mide con voltímetro o polímetro.
Restistencia (R)
Oposición de un cuerpo al paso de la corriente eléctrica.
Depende del material, de la longitud y de la sección.
Unidad: Ohmio
Se mide con óhmero.

Ley de Ohm
La intensidad de corriente eléctrica (I) que recorre un circuito es igual a la tensión (V) a la que está conectado por su resistencia (R)
I = V/R
Resumiendo...
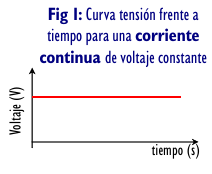
Tipos de corriente
Corriente contínua
Circula siempre
en un mismo sentido, producida por dinamos, pilas,
baterías, celdas voltaicas....
Todos los dispositivos electrónicos trabajan
con este tipo de corriente.
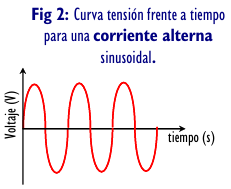
Corriente alterna
Circula alternativamente en dos sentidos, por lo que la tensión y la intensidad varían en función del tiempo; i.e. las cargas fluyen alternativamente primero en una
dirección y luego en la otra.
La más empleada es aquella en la que la tensión y la intensidad varían según una función sinusoidal en función del tiempo.
Elementos de los circuitos eléctricos y electrónicos
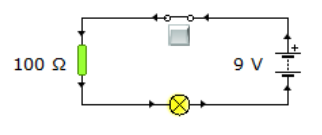
Circuito eléctrico
Cualquier conexión de elementos a través de los cuales puede circular la corriente de forma transitoria o permanente.
Elementos
- Generador o fuente de tensión
- Conductores
- Elementos de control
- Interruptores
- Pulsadores
- Conmutadores
- Relés
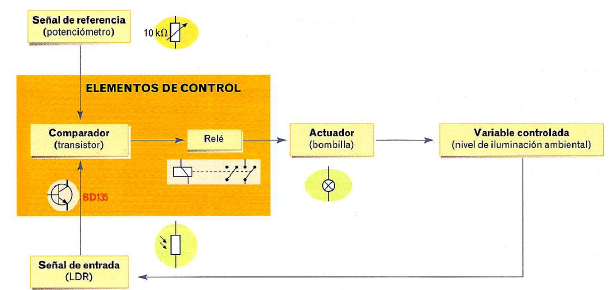
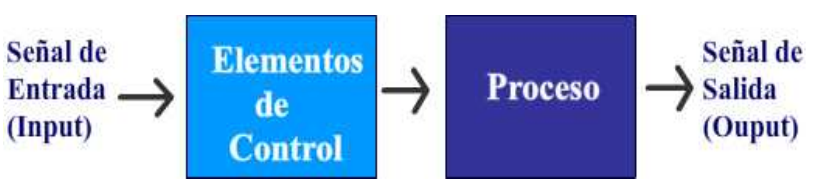
Sistema de control
Sistema capaz de iniciar y detener procesos sin la intervención manual de un usuario. Para ello necesitan recibir información del exterior (entrada - input), procesarla y emitir una respuesta (salida - output).
Componentes de un Sistema de Control
- Sensor
- Señal entrada
- Vbl. Referencia
- Comparador
- Controlador (relé)
- Actuador
- Realimentación
Tipos de sistemas de control
- De lazo abierto
- De lazo cerrado
1. De lazo abierto
- Son sistemas que no monitorizan la variable controlada, por lo que no requieren sensores.
- No modifican su funcionamiento según las condiciones del entorno, siguen una secuencia de operación prefijada.
- La mayor parte pueden considerarse automatismos ya que no tienen en cuenta la salida y por tanto su capacidad de toma de decisiones es limitada.
2. De lazo cerrado
- Son sistemas que vigilan permanentemente la variable controlada y actúan en función de los cambios que sufre la variable.
- Requieren sensores para controlar la variable
- Modifican su funcionamiento según la información recogida por los sensores

Ejercicio pág. 6. Experimento.
- Dibuja un hexágono.
- Dibuja de nuevo un hexágono con los ojos cerrados.
- ¿Puedes distinguir qué proceso es un sistema de lazo abierto y cuál de lazo cerrado? Expón los motivos.
- En el caso del lazo cerrado, identifica qué partes del cuerpo realizan las funciones de actuador, controlador y sensor.
Resistencias
Resistencia
La resistencia eléctrica es la oposición al flujo de corriente eléctrica a través de un conductor.
La unidad es Ω
Los símbolos eléctricos de las resistencias son:

Ley de Ohm
La intensidad de corriente eléctrica (I) que recorre un circuito es igual a la tensión (V) a la que está conectado por su resistencia (R)
I = V/R
Tipos de resistencias
- Fijas
- Variables
- Especiales
Resistencias fijas
El valor de la resistencia es fijo y está determinado por un código de colores.


Resistencias fijas. Código de colores
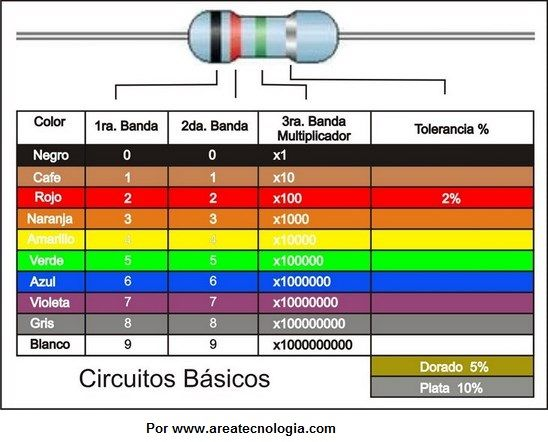
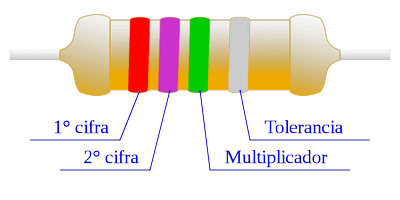
El primer color nos dice que tiene un valor de 2, el segundo de 7, es decir 27, y el tercer valor es por 100.000 (o añadirle 5 ceros). La resistencia valdrá 2.700.000 Ω = 2.7 MΩ.
¿Cual será su tolerancia? pues como es color plata es del 10%. Esa resistencia en la realidad podrá tener valores entre 2.700.000Ω +- el 10% de ese valor. Podrá valer 270.000Ω más o menos del valor teórico que es 2.700.000Ω.
Resistencias variables
Nos permiten variar su valor modificando la posición de un contacto deslizante.
También se llaman potenciómetros.

Resistencias especiales
Varían su valor en función de la estimulación que reciben de un factor externo (luz, temperatura, etc.)


Sensores
Sensor (definición)
Elemento del sistema de control que permite traducir la información que le llega del exterior en un impulso eléctrico, normalmente digital (pasa o no pasa corriente), que puede ser analizado y procesado por la unidad de control del sistema.
Tipos
Dependiendo del tipo de variable que tengan que medir o detectar:
-
De contacto.
-
Ópticos
-
Térmicos
-
De humedad
-
Magnéticos
-
De infrarrojos
Sensores de contacto
Se emplean para detectar el final del recorrido de componentes mecánicos. Por ejemplo: saber cuando una puerta que se abre automáticamente está ya abierta y por tanto el motor que la acciona debe pararse.
Fines de carrera (o finales de carrera).

Sensores de contacto: NA y NC
La pieza NA está separada de la móvil y sólo hace contacto cuando el componente mecánico llega al final de su recorrido y acciona la pieza móvil haciendo que pase la corriente por el circuito de control.
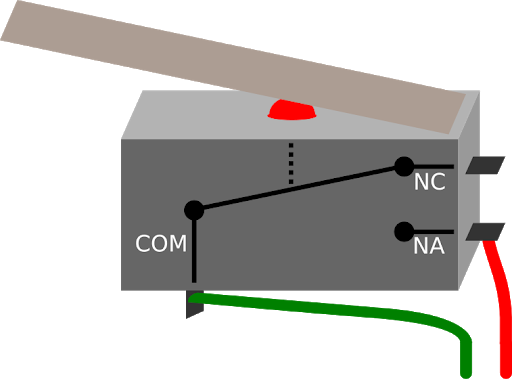
La pieza NC hace contacto con la móvil y sólo se separa cuando el componente mecánico llega al final de su recorrido y acciona la pieza móvil impidiendo el paso de la corriente por el circuito de control.
Sensores de contacto. Vídeo 1
Sensores de contacto. Vídeo 2
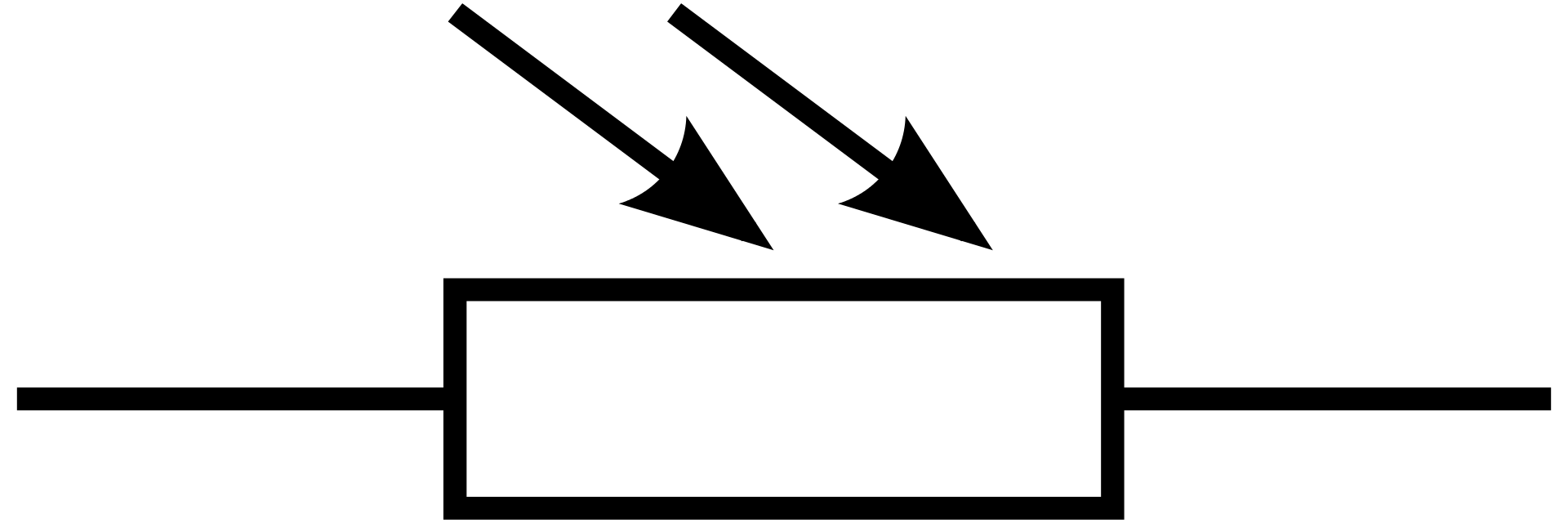
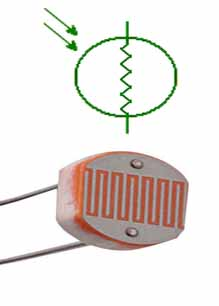
Sensores ópticos
Detectan la presencia de una persona o de un objeto que interrumpen el haz de luz que le llega al sensor. Los principales sensores ópticos son las fotorresistencias, las LDR.
Sensores ópticos
Un fotorresistor o fotorresistencia es un componente electrónico cuya resistencia se modifica, (normalmente disminuye) con el aumento de intensidad de luz incidente.
Cuando reciben un haz de luz permiten el paso de la corriente eléctrica por el circuito de control. Cuando una persona o un obstáculo interrumpen el paso de la luz, la LDR aumenta su resistencia e interrumpe el paso de corriente por el circuito de control.
Sensores ópticos (LDR)
El circuito que aparece en la imagen nos permitiría controlar la puesta en marcha de una alarma al disminuir la intensidad luminosa que incide sobre un LDR.
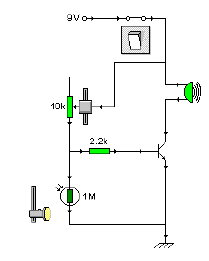
Explica los componentes y el funcionamiento de este circuito
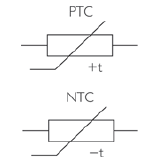
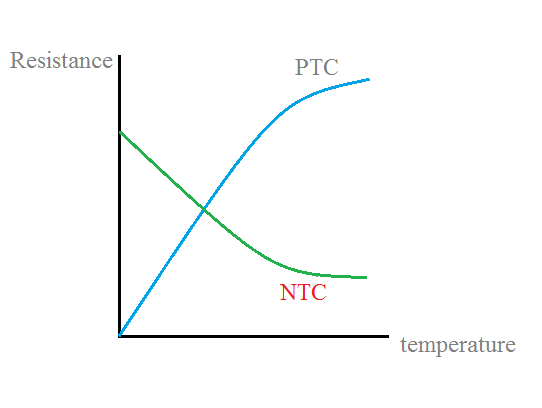
Sensores temperatura (termistores)
Son resistencias cuyo valor se modifica en función de la temperatura.
En los termisores PTC la resistencia aumenta con el aumento de temperatura.
En los termisores NTC la resistencia disminuye con el aumento de temperatura.

Sensores humedad
Se basan en que el agua es un material conductor por lo que un par de cables eléctricos desnudos van a conducir una pequeña cantidad de corriente si el ambiente es húmedo.
Se emplean para detectar nivel de líquido en un depósito, en sistemas de riego...

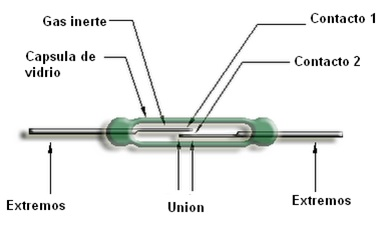
Sensores magnéticos
Detectan campos magnéticos provocados por imanes o las corrientes eléctricas.
Interruptor Reed:
Son 2 láminas metálicas ferromagnéticas dentro de una cápsula que se atraen cuando existe un campo magnético, cerrando así el circuito.

Sensores infrarrojos
Existen diodos capaces de emitir luz infrarroja y transistores sensibles a este tipo de ondas que pueden detectar las emisiones de los diodos.
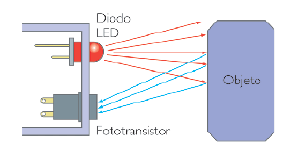


Diodo emisor
Diodo receptor
Ejercicios repaso sensores
Páginas 20-22
Usos industriales de los robots
Robots
Un robot industrial es una máquina de manipulación automática reprogramable y multifuncional, que posee tres o más ejes que pueden posicionar y orientar materias, piezas, herramientas o dispositivos especiales para la ejecución de trabajos diversos, en las diferentes etapas de la producción industrial, ya sea en una posición fija o en movimiento.
IFR (International Federation Robotic)
Objetivos de la robótica industrial
- Mejorar la calidad de fabricación
- Optimizar el rendimiento de otras máquinas y herramientas que estén relacionadas con el robot
- Amortizar la inversión, sustituyendo la mano de obra y evitando pérdidas de material y averías (reducir mantenimiento)
- Disminuir stocks
- Realizar trabajos en condiciones hostiles y peligrosas.
Robots industriales según su arquitectura
- Poliarticulados
- Móviles
- Androides
- Zoomórficos
- Híbridos
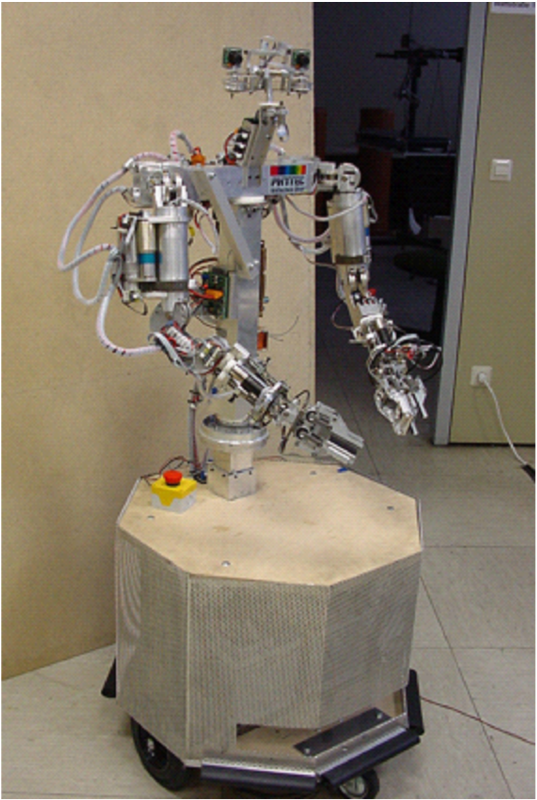
Poliarticulados
- Tienen múltiples formas.
- Suelen ser sedentarios aunque pueden ser guiados para desplazamientos limitados.
- Mueven sus terminales según uno o más sistemas de coordenadas y con diferentes grados de libertad.

Móviles
- Gran capacidad desplazamiento.
- Transportan piezas de un punto a otro de la cadena de fabricación.
- Guiados por pistas metalizadas, radiación electromagnética de circuitos empotrados en el suelo, bandas fotodetectadas...
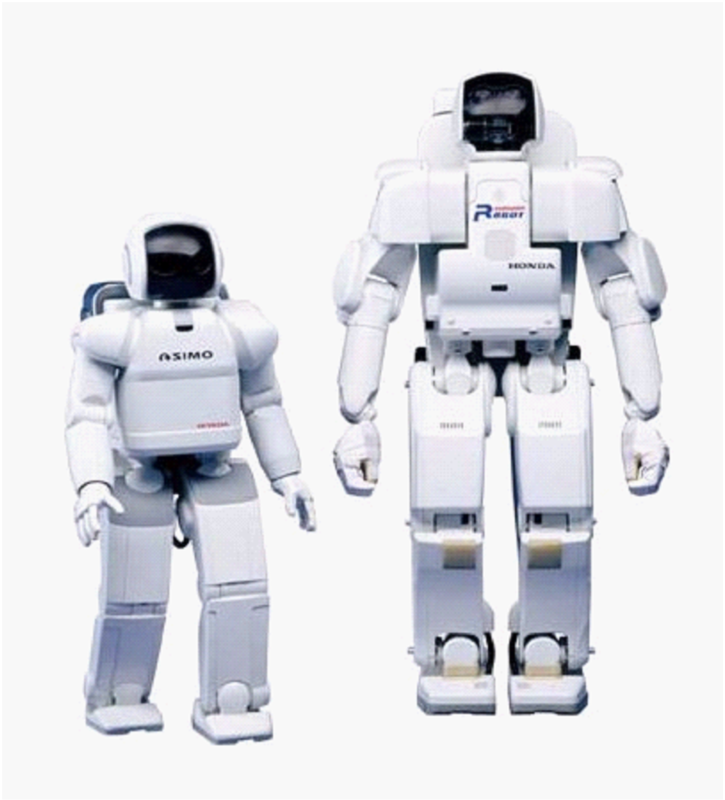
Androides
- Intentan reproducir forma y comportamiento humano, sobre todo LOCOMOCIÓN BÍPEDA.
- Aún están poco evolucionados.
Zoomórficos
- Su sistema de locomoción imita a diferentes seres vivos.
- No caminantes:
- Poco evolucionados.
- Ej. experimentos Japón
- Caminantes:
- Para vehículos terrestres (pilotados o autónomos).
- Exploración espacial o estudio volcanes.

Híbridos
- Combinación de los anteriores:
- Dispositivo articulado con ruedas - móvil y zoomórfico.
Principales aplicaciones de los robots industriales
- Soldadura
- Corte (laser, térmico...)
- Pintura spray
- Manipular materiales
- Carga materiales pesados
- Embalaje
- Etiquetado
- Paletizado
- ...
Domótica
Conjunto de sistemas y tecnologías que permiten que una vivienda se automatice (gestione su propio hogar)
Robots y domótica (P.L.E.I.)
- Aplicaciones y tipos de sistemas domóticos en el hogar
- Iluminación
- Climatización
- Seguridad
- Ventanas y persianas
- Jardín
- Televisión
- ¿Qué necesito para tener una casa domótica?
Link a enunciado en Teams: 01_PLEI_UD1_DOMOTICA.odt
Muchas gracias
Unidad Didáctica 1: Sistemas automáticos by David Fernández Arango is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Tecnología 4º ESO. UD3: Electrónica Analógica
By darango
Tecnología 4º ESO. UD3: Electrónica Analógica
Tecnología 4º ESO. UD3: Electrónica Analógica. Curso 2020/2021




