Davide Faconti
A quick and uncomplete summary of what I did in 16 years
Humanoids!
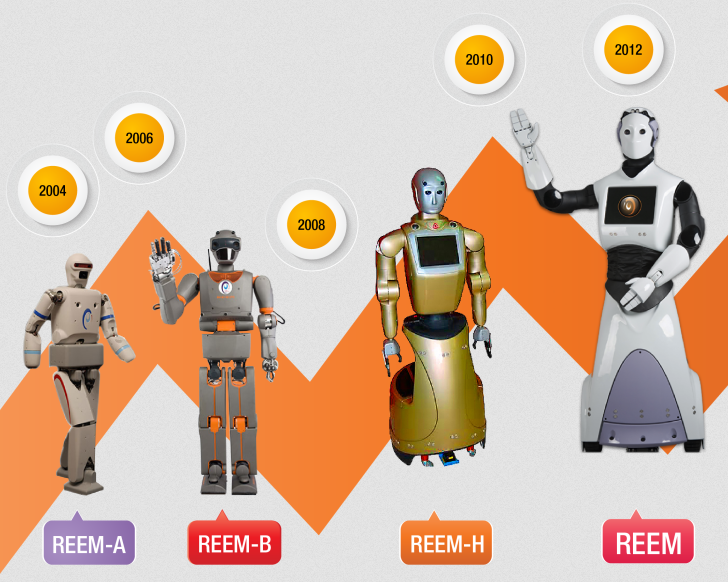
- Founded the R&D team that became Pal Robotics (employe #1)
- Tech Lead / CEO.
- Software for simulation and real-time control.
- Low level interface.
- Lead of the mechanical team
Model-Driven Development

Delta robot for metrology
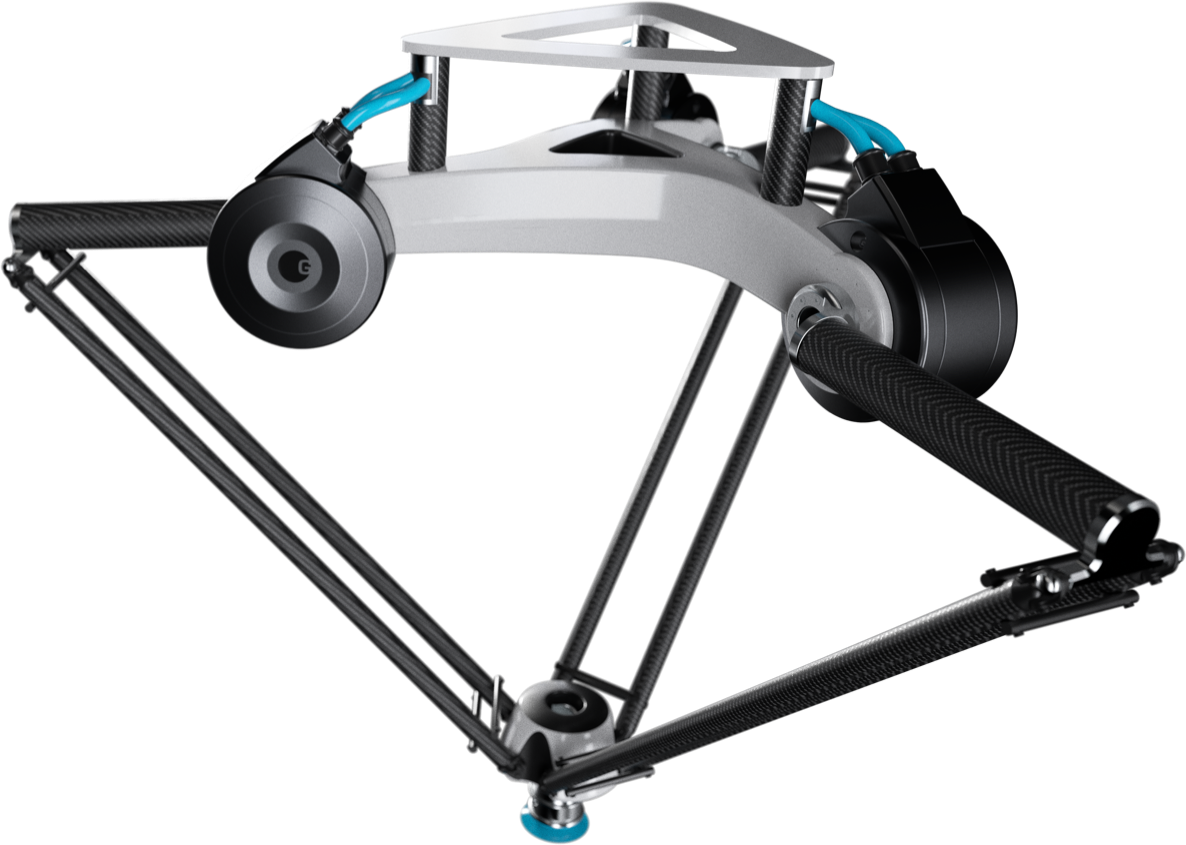
- 5g acceleration!
- 50 um precision!
- Hard real-time (10 KHz loop)!
I was responsible for the path planning and control
+
Basic "Middleware"
More humanoids!
Darpa Robotic Challenge
- Joined the IHMC team (second place at the DRC)
- Developed from scratch the full-body control using Hierarchical "Stack of Tasks"

Text
Eurecat Technology Center


- Grape: robot for vineyard inspection
- MAIC: mobile manipulator for the industry.
- BehaviorTree.CPP (initially a RobMoSys project)
Text
Blue Ocean Robotics

"Robotic Architect":
- Involved in all the projects of the company.
- Main focus: perception and navigation.
- Responsible for the harmonization of the platform.
- Implementation of new modules or improvement of old ones.
- Coordinating the Visual-SLAM team
Text
Things I have done
- Architectural design of robotic hardware.
- Components selection.
- Low-level interfaces with hardware under real-time constraints.
- Control or robotic arms or legs (kinematic, dynamic, path planning).
- Autonomous Navigation (indoor and outdoor).
- C++ optimizations and refactoring.
- Some Perception....
- High-level task planning.
- Project Management.
Text
Open Source contributions for fun and profit
- PlotJuggler
- BehaviorTree.CPP + Groot
- Velodyne ROS driver
- Intel RealSense ROS driver
- Robosense ROS driver
- MapViz
- LOAM Velodyne
- Lego-LOAM
- PCL
- iris_lama

About Me
By Davide Faconti




