



Davide Murari
A PhD student in numerical analysis at the Norwegian University of Science and Technology.
Davide Murari
davide.murari@ntnu.no
In collaboration with : Elena Celledoni, James Jackaman, Brynjulf Owren, Carola-Bibiane Schönlieb, and Ferdia Sherry
\( \mathcal{N}(x) = f_{\theta_M}\circ ... \circ f_{\theta_1}(x)\)
Neural networks motivated by dynamical systems
\( \dot{x}(t) = F(x(t),\theta(t)) \)
Where \(F_i(x) = F(x,\theta(t_i))\)
\( \delta t_i = t_{i}-t_{i-1}\)
\( \mathcal{N}(x) = f_{\theta_M}\circ ... \circ f_{\theta_1}(x)\)
Neural networks motivated by dynamical systems
\( \dot{x}(t) = F(x(t),\theta(t)) \)
Where \(F_i(x) = F(x,\theta(t_i))\)
\( \delta t_i = t_{i}-t_{i-1}\)
\( \mathcal{N}(x) = f_{\theta_M}\circ ... \circ f_{\theta_1}(x)\)
Neural networks motivated by dynamical systems
\( \dot{x}(t) = F(x(t),\theta(t)) \)
Where \(F_i(x) = F(x,\theta(t_i))\)
\( \delta t_i = t_{i}-t_{i-1}\)
Neural networks motivated by dynamical systems
Outline
Universal approximation theorem based on gradient flows
Approximation theory for ResNets applied to space-time PDE data
Defining neural networks with prescribed properties
Pixel-based learning
\(U^{n+1} = \Phi(U^n)\)
GOAL: Approximate the map \(\Phi\)
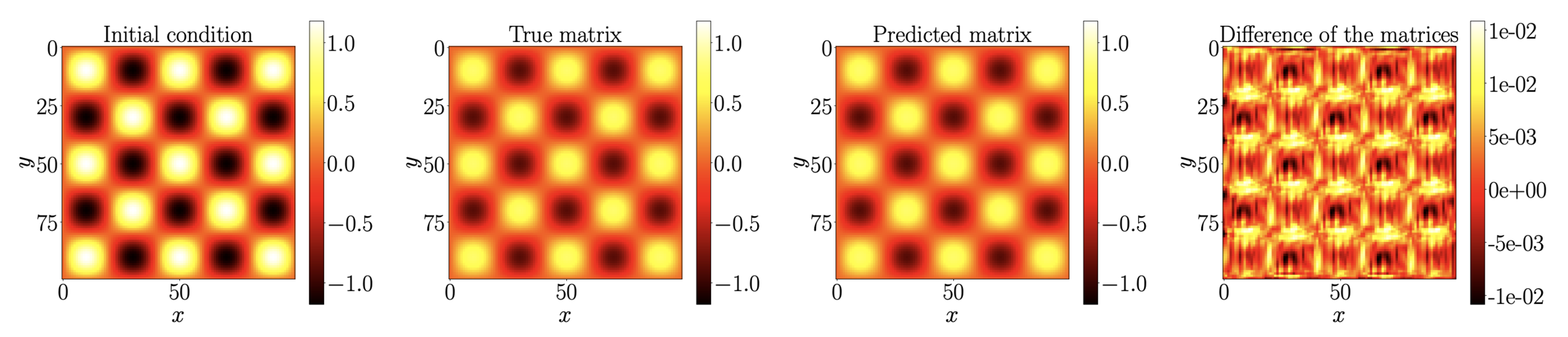
Predictions at time \(40\delta t\)
Fisher's equation:
\(\partial_t u=\alpha \Delta u+u(1-u)\)
Approximation of space-time dynamics of PDEs
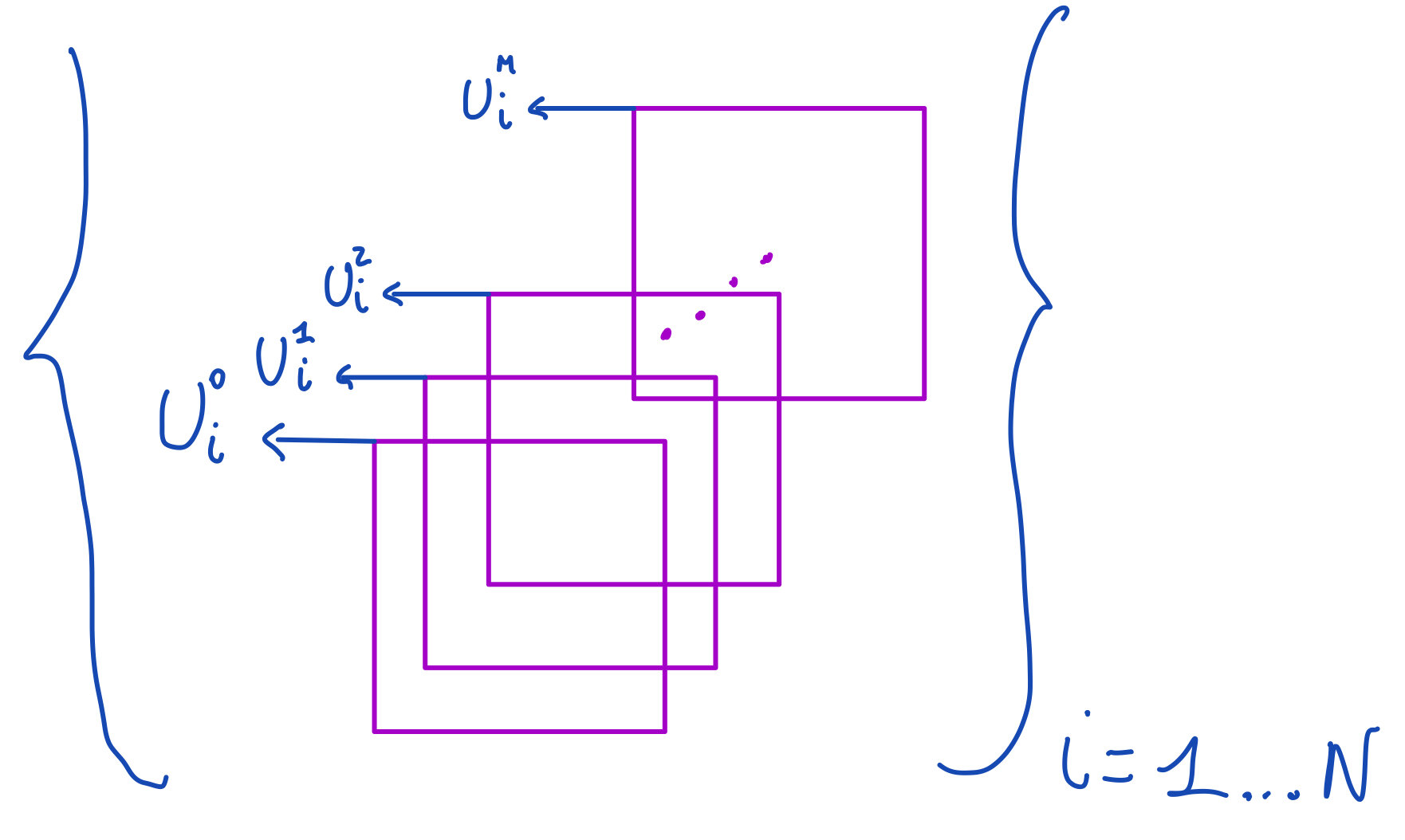
\(0=t_0 < t_1<...<t_M\)
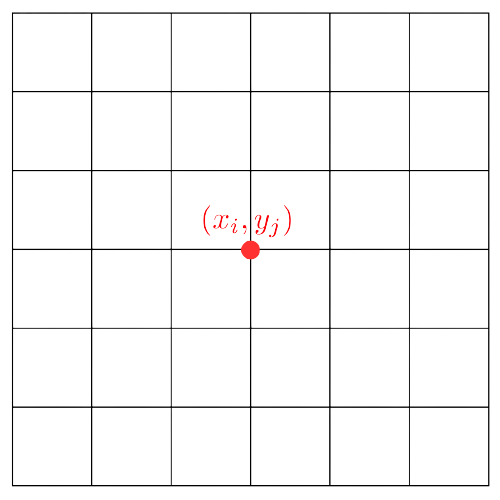
\(U_{ij}^n = u(t_n,x_i,y_j)\)
{
Method of lines
Initial PDE
Semidiscretisation in space with finite differences
Approximation of the time dynamics
Method of lines
Initial PDE
Semidiscretisation in space with finite differences
Approximation of the time dynamics
Method of lines
Initial PDE
Semidiscretisation in space with finite differences
Approximation of the time dynamics
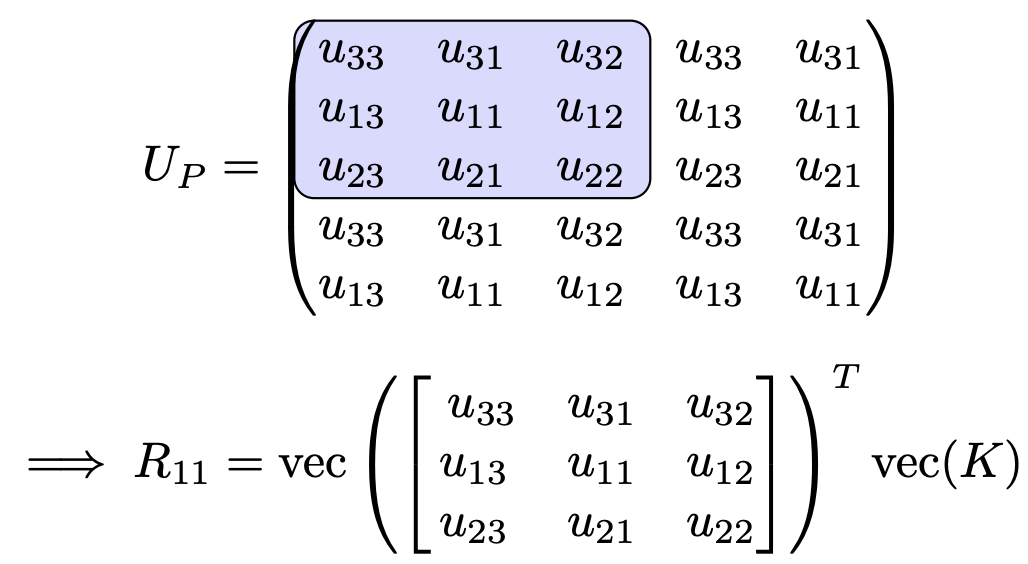
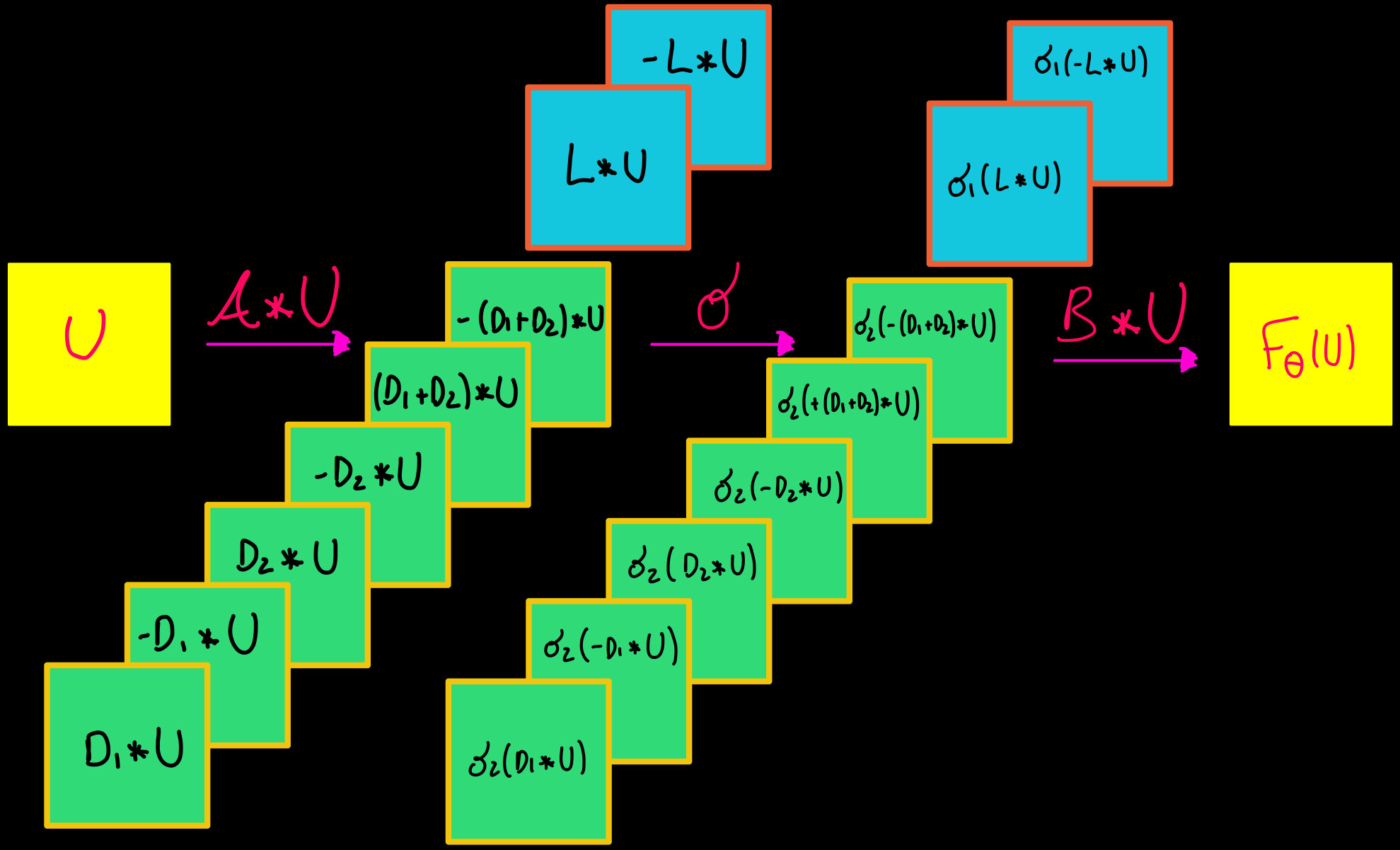
Finite differences as convolutions
Example
Error splitting
Layer of a ResNet we want to study
Splitting:
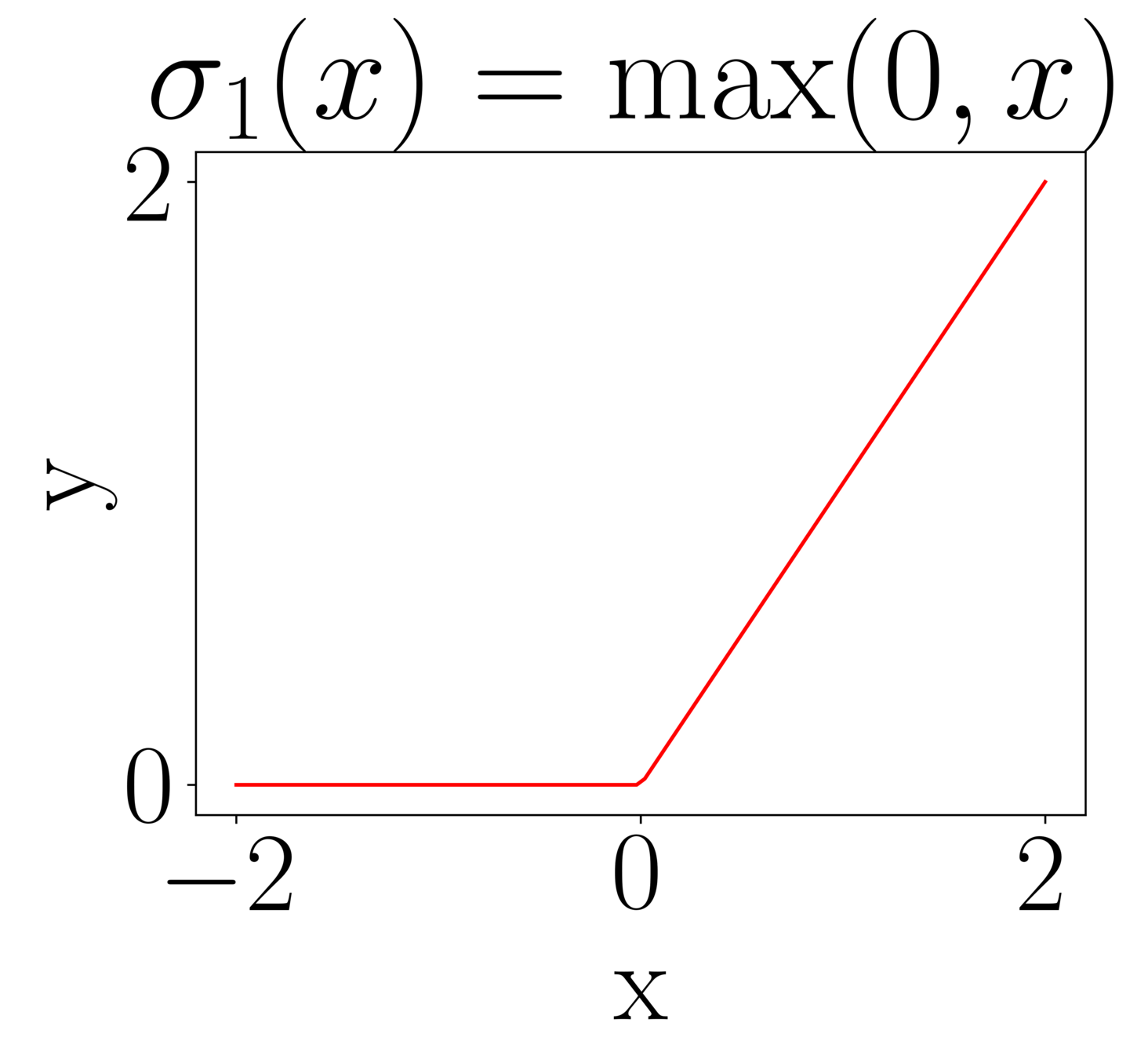
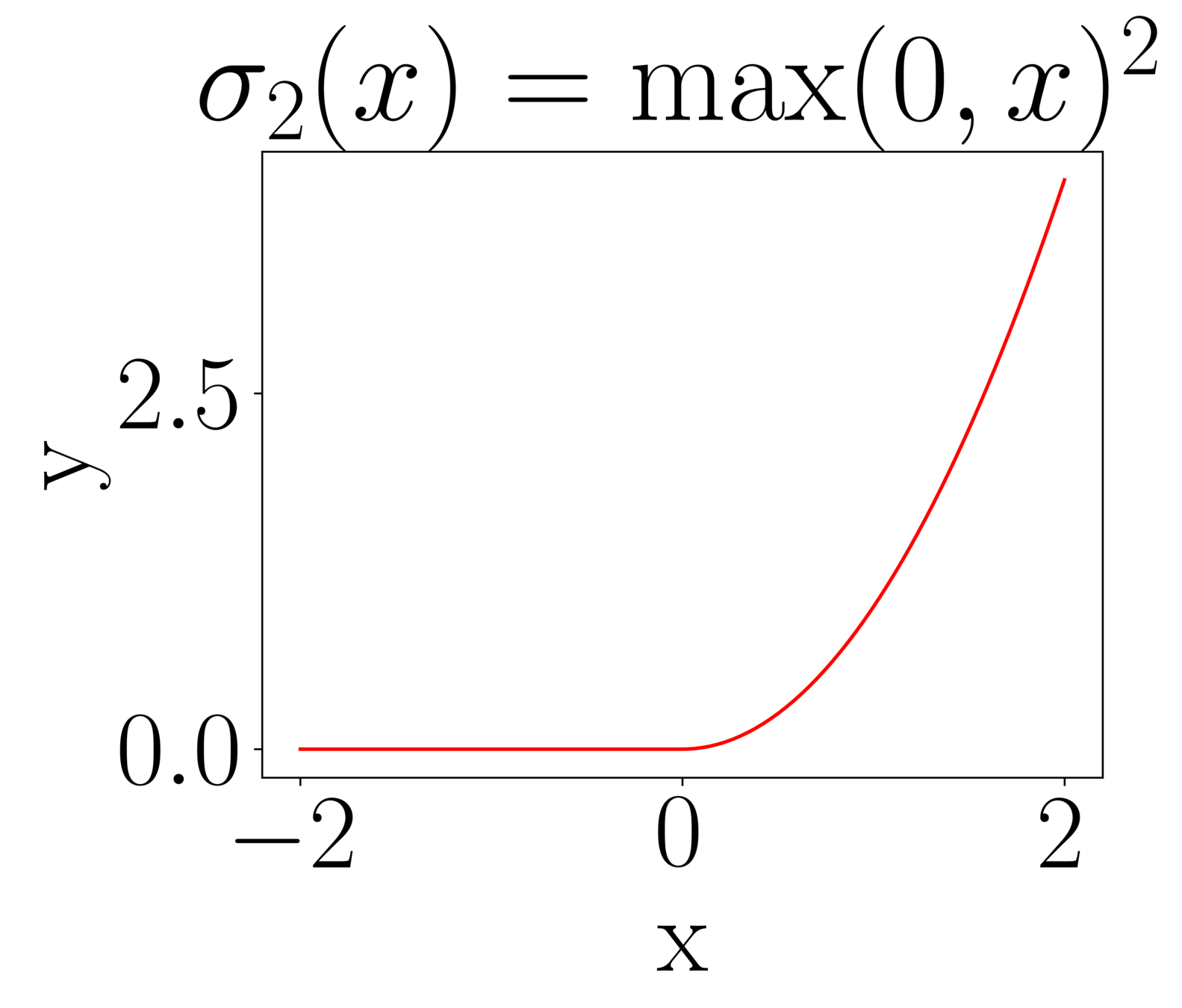
Useful activation functions
Simple but useful property:
\(x^p = \max(0,x)^p + (-1)^p\max(0,-x)^p\)
Approximation theorem
Simplified setting
Approximation theorem
Approximation theorem
This can theoretically be 0. In practice, it depends on to the optimisation error.
Examples of problems with a specific structure
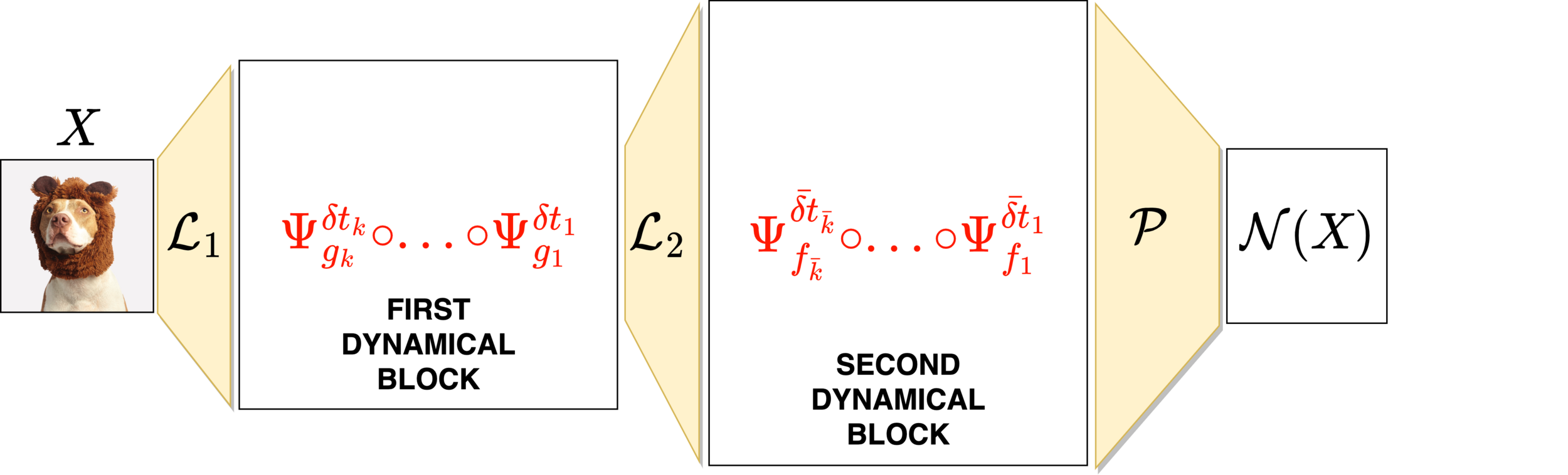
What if I want a network to satisfy a certain property?
GENERAL IDEA
EXAMPLE
Property \(\mathcal{P}\)
\(\mathcal{P}=\) Volume preservation
Family \(\mathcal{F}\) of vector fields that satisfy \(\mathcal{P}\)
\(F_{\theta}(x,v) = \begin{bmatrix} \Sigma(Av+a) \\ \Sigma(Bx+b) \end{bmatrix} \)
\(\mathcal{F}=\{F_{\theta}:\,\,\theta\in\mathcal{P}\}\)
Integrator \(\Psi^{\delta t}\) that preserves \(\mathcal{P}\)
GENERAL IDEA
EXAMPLE
Property \(\mathcal{P}\)
\(\mathcal{P}=\) Volume preservation
Family \(\mathcal{F}\) of vector fields that satisfy \(\mathcal{P}\)
\(F_{\theta}(x,v) = \begin{bmatrix} \Sigma(Av+a) \\ \Sigma(Bx+b) \end{bmatrix} \)
\(\mathcal{F}=\{F_{\theta}:\,\,\theta\in\mathcal{P}\}\)
Integrator \(\Psi^{\delta t}\) that preserves \(\mathcal{P}\)
What if I want a network to satisfy a certain property?
GENERAL IDEA
EXAMPLE
Property \(\mathcal{P}\)
\(\mathcal{P}=\) Volume preservation
Family \(\mathcal{F}\) of vector fields that satisfy \(\mathcal{P}\)
\(F_{\theta}(x,v) = \begin{bmatrix} \Sigma(Av+a) \\ \Sigma(Bx+b) \end{bmatrix} \)
\(\mathcal{F}=\{F_{\theta}:\,\,\theta\in\mathcal{P}\}\)
Integrator \(\Psi^{\delta t}\) that preserves \(\mathcal{P}\)
What if I want a network to satisfy a certain property?
Choice of dynamical systems
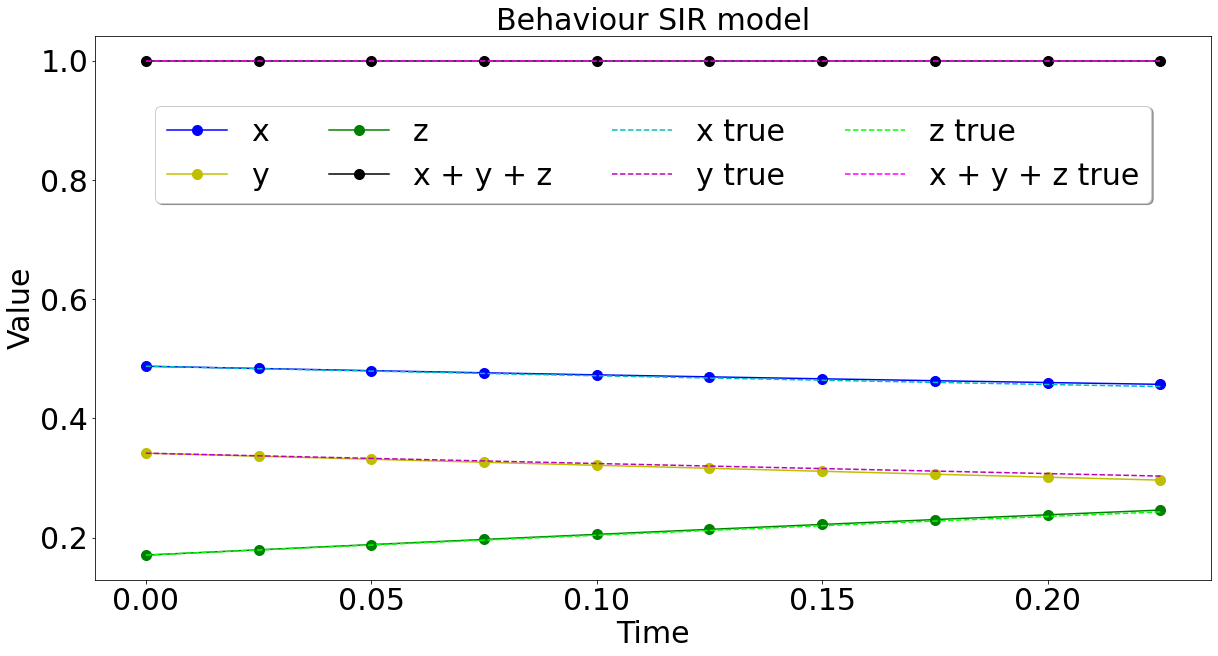
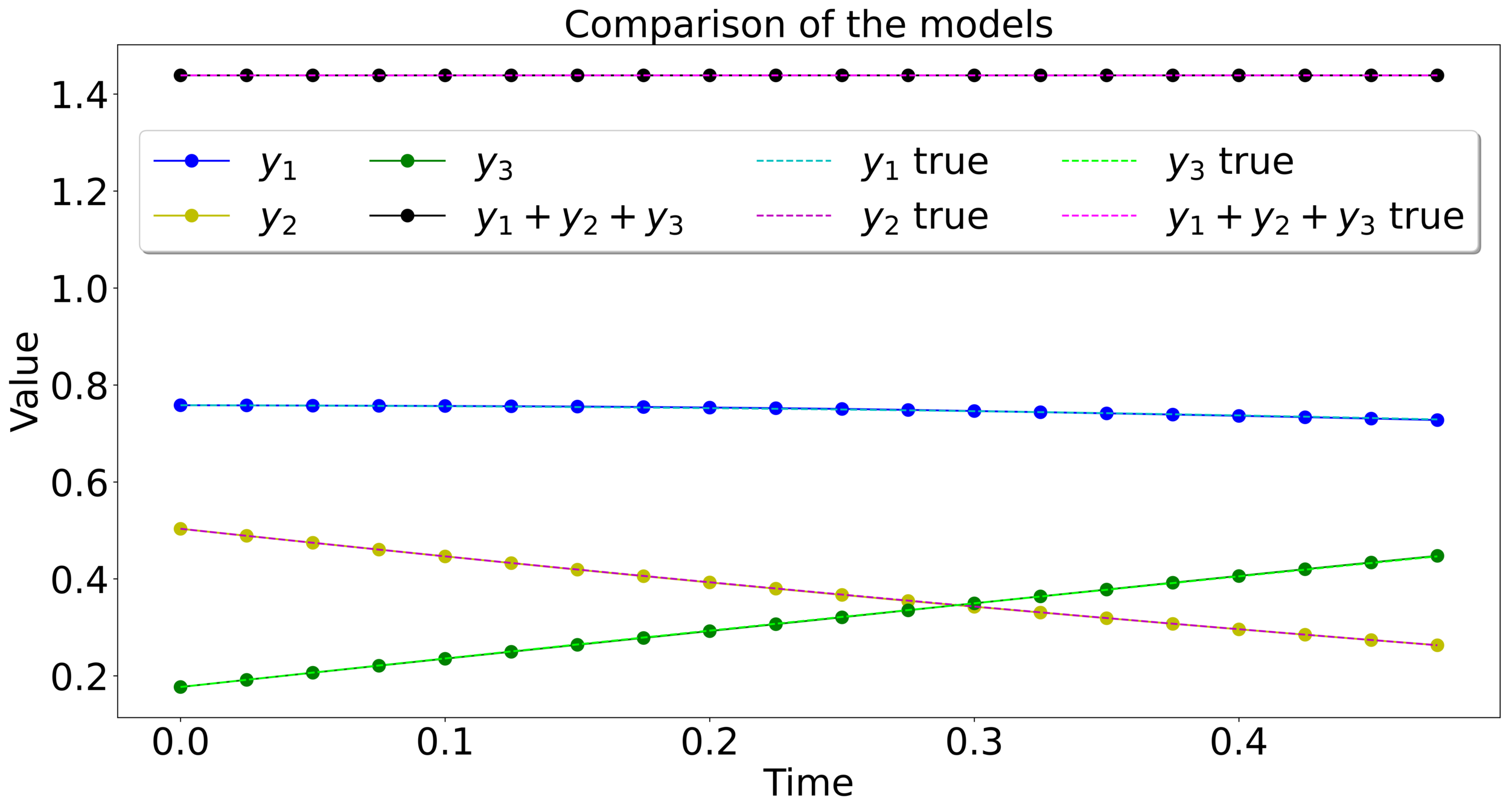
MASS-PRESERVING NEURAL NETWORKS
SYMPLECTIC NEURAL NETWORKS
Choice of dynamical systems
MASS-PRESERVING NEURAL NETWORKS
SYMPLECTIC NEURAL NETWORKS
Choice of numerical methods
MASS-PRESERVING NEURAL NETWORKS
SYMPLECTIC NEURAL NETWORKS
Any Runge-Kutta method
Any Symplectic numerical method
Choice of numerical methods
MASS-PRESERVING NEURAL NETWORKS
SYMPLECTIC NEURAL NETWORKS
Any Runge-Kutta method
Any Symplectic numerical method
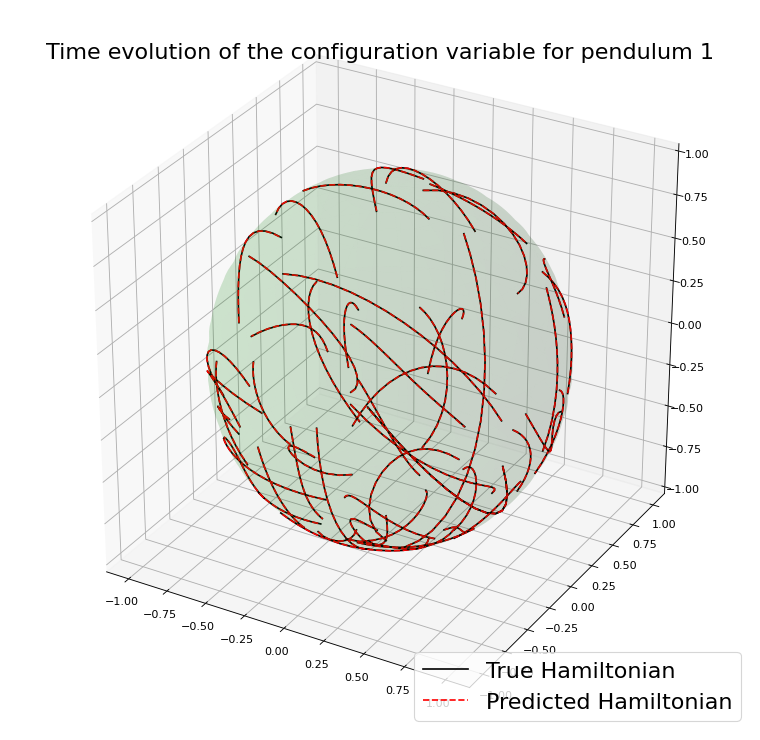
Can we still approximate many functions?
Then \(F\) can be approximated arbitrarily well by composing flow maps of gradient and sphere preserving vector fields.
Presnov Decomposition
Idea of the proof
Mass-preserving networks
\(X\) , Label : Plane
\(X+\delta\), \(\|\delta\|_2=0.3\) , Label : Cat
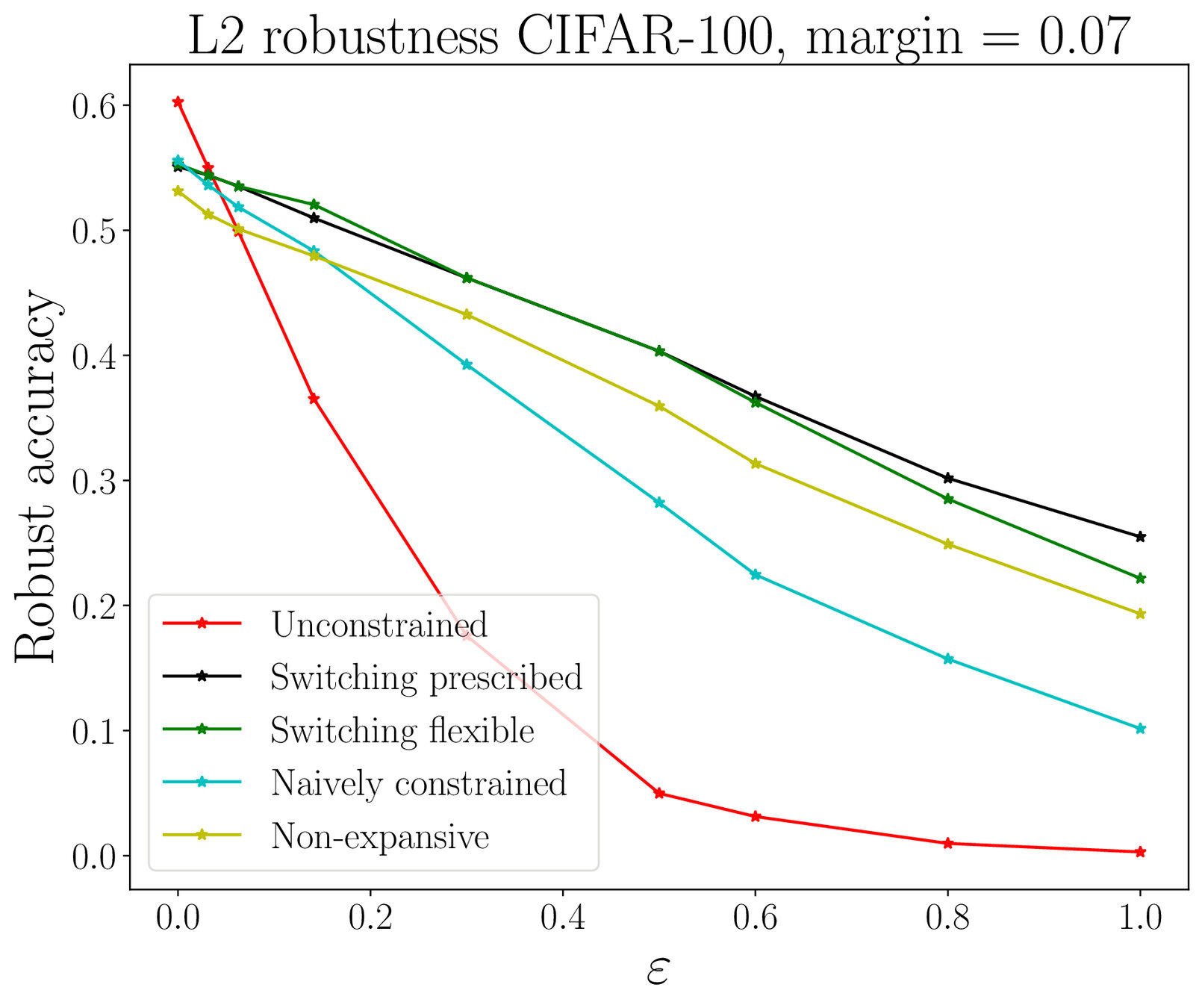
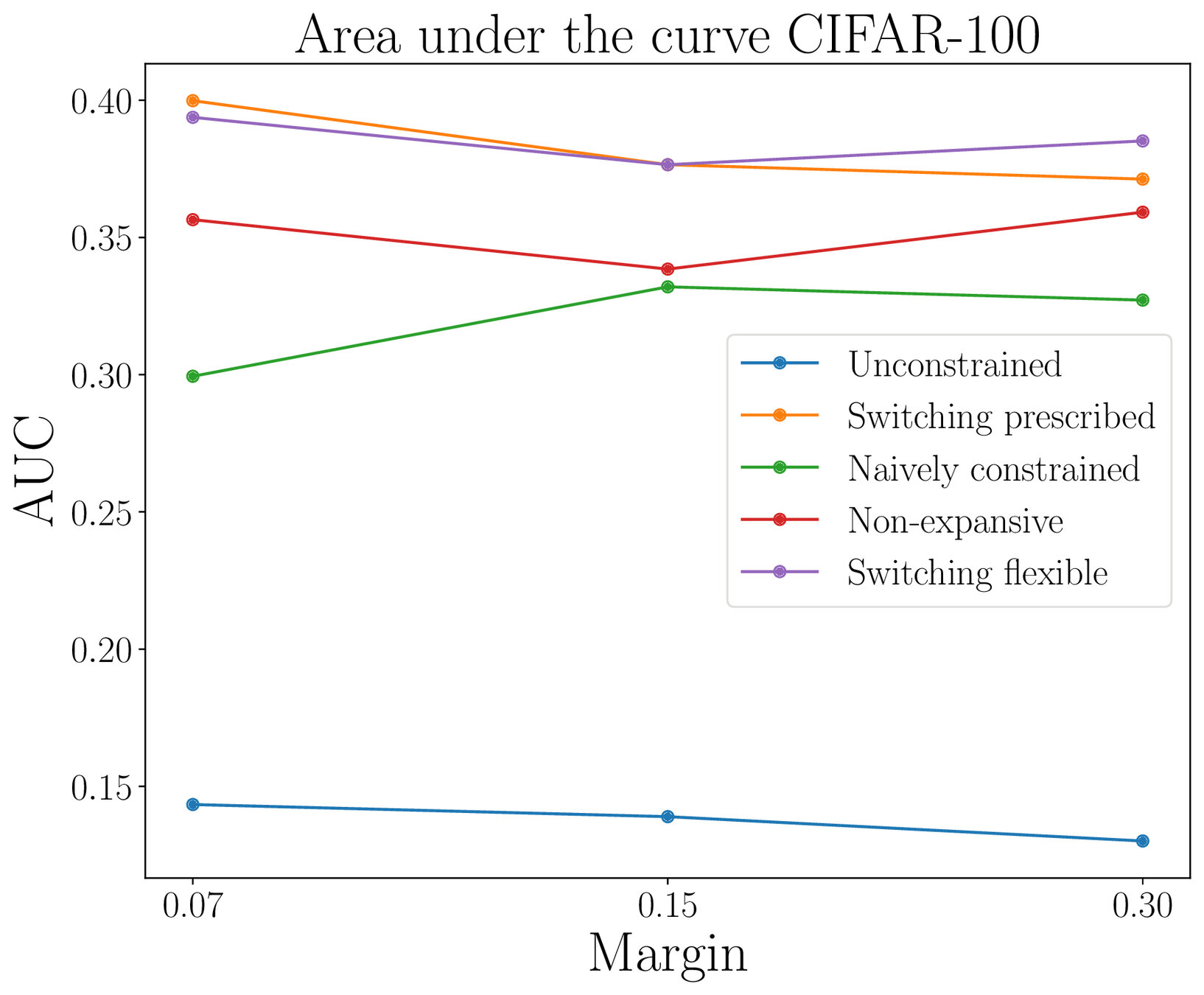
Adversarial robustness
Lipschitz-constrained networks
We impose :
Lipschitz-constrained networks
Adversarial robustness
By Davide Murari
Slides Talk INI 30 May 2023




