Revisión - Junio 2019
DyCon Toolbox is a MATLAB library of Non Lineal Optimal Control
\min_{u\in\Omega} J \\
s.t. \ \ \dot{Y} = f(t,Y,U) \\
s.t. \ \ Y(0) = Y_0
s.t. \ \ C(Y,U) = 0 \\
s.t. \ \ G(Y,U) < 0 \\
Dynamic
Constraint
Control State Constraints
J = \Psi(T,Y(T)) + \int_0^T L(t,Y(t),U(t)) dt \\
DyCon Toolbox solve this problem:
\min_{u\in\Omega} J \\
J = \Psi(T,Y(T)) + \int_0^T L(t,Y(t),U(t)) dt \\
s.t. \ \ \dot{Y} = f(t,Y,U) \\
s.t. \ \ Y(0) = Y_0
s.t. \ \ C(Y,U) = 0 \\
s.t. \ \ G(Y,U) < 0 \\
Dynamic
Constraint
Control State Constraints
With Final Time Fixed
DyCon Toolbox solve this problem:
Method Clasification to solve this problems
Indirect Methods
Direct Methods
Use the optimal conditions
Discretization all equations
H = L + p*f \\
\dot{p} = -H_{y} \\
\dot{x} = H_{p} \\
H_{u} = 0 \\
...
U = [u_1 u_2 \ ... \ u_3] \\
Y = [y_1 y_2 \ ... \ y_3]
\min \ J(u_1,u_2,...,y_1,y_2)
Methods to solve this problem
AMPL IPOPT
H = L + p*f \\
\dot{p} = -H_{y} \\
\dot{x} = H_{p} \\
H_{u} = 0 \\
...
U = [u_1 u_2 \ ... \ u_3] \\
Y = [y_1 y_2 \ ... \ y_3]
\min \ J(u_1,u_2,...,y_1,y_2)
Indirect Methods
Direct Methods
DyCon Toolbox puede obtener las condiciones de optimalidad gracias al cálculo simbólico de MATLAB
Indirect Methods
Indirect Methods
J = y_1^2(1) + y_2^2(1) + 0.005*\int_0^1 u_1^2(t) + u_2^2(t) dt \\
\begin{bmatrix}
\dot{y_1} \\
\dot{y_2} \\
\end{bmatrix} =
\begin{bmatrix}
y_1y_2 + u_1 \\
-y_2 +u_2 \\
\end{bmatrix}
\begin{bmatrix}
y_1(0) \\
y_2(0) \\
\end{bmatrix} =
\begin{bmatrix}
0 \\
-1 \\
\end{bmatrix}
Veamos un ejemplo
Y = sym('y',[2 1]); U = sym('u',[1 1])
% Vector dynamics
F = @(t,Y,U) [ Y(1)*Y(2) + U(1) ; ...
-Y(2) + U(2) ] ;
% Create a ode object
dynamics = ode(F,Y,U);
dynamics.InitialCondition = [0;-1];
%
Psi = @(T,Y) Y*Y;
L = @(t,Y,U) 0.005*(U*U) ;
%
% We finally define the optimal control problem as a
% Pontryagin class:
iP = Pontryagin(dynamics,Psi,L);
%Indirect Methods
En código ...
Indirect Methods
\partial_Y f(t,Y,U) \\
\partial_U f(t,Y,U) \\
\partial_Y L(t,Y,U) \\
\partial_U L(t,Y,U) \\
\partial_Y \Psi(T,Y(T))
Con estos pasos hemos obtenido la expresión simbólica y el función numérica de:
Indirect Methods
\partial_Y f(t,Y,U) \\
Por ejemplo:
>> iP.Dynamics.DerivativeDynState
ans =
SymNumFun with properties:
Numerical: @(t,in2,in3)reshape([in2(2,:),0.0,in2(1,:),-1.0],[2,2])
Symbolical: [2×2 sym]Si vemos en el interior de la variable IP encontramos la expresión simbólica y la función numérica
Indirect Methods
\partial_Y f(t,Y,U) \\
Por ejemplo:
>> iP.Dynamics.DerivativeDynState.Symbolical
ans =
[ y2, y1]
[ 0, -1]Vemos en este caso el valor simbólico
\begin{bmatrix}
\dot{y_1} \\
\dot{y_2} \\
\end{bmatrix} = f(t,Y,U) =
\begin{bmatrix}
y_1y_2 + u_1 \\
-y_2 +u_2 \\
\end{bmatrix}
\partial_Y f = \begin{bmatrix}
y_2 & y_1 \\
0 & -1 \\
\end{bmatrix}
Indirect Methods
\dot{P} = \partial_Y f + \partial_Y L \\
s.t. \ \ P(T) = \partial_Y \Psi
De la misma forma para Adjoint Equation
\text{Dado que tenemos }\partial_Y f \text{ y } \partial_Y L
\text{ podemos calcular } \\ \text{ la ecuación adjunta}
Indirect Methods
\text{Give } U \rightarrow \text{ Obtain }[J, d_{U}J, d^2_{U}J]
DyCon Toolbox resume todo a una función
>> [J,Gradient,Hessian] = Control2Functional(iP,U0)J =
0.1200
Gradient =
-0.0240 0
-0.0270 0
-0.0304 0
-0.0342 0
-0.0384 0
-0.0433 0
-0.0487 0
-0.0547 0
-0.0616 0
-0.0693 0
Hess =
0 -1.0000
0 -0.8889
0 -0.7901
0 -0.7023
0 -0.6243
0 -0.5549
0 -0.4933
0 -0.4385
0 -0.3897
0 -0.3464Indirect Methods
\text{Give } U \rightarrow [J, d_{U}J, d^2_{U}J]
Se han implementado métodos del gradiente dentro de DyCon Toolbox
GradientMethod(iP,U0,'DescentAlgorithm',@ConjugateDescent)
%
GradientMethod(iP,U0,'DescentAlgorithm',@ClassicalDescent)
%
GradientMethod(iP,U0,'DescentAlgorithm',@AdaptativeDescent)Indirect Methods
\text{Give } U \rightarrow [J, d_{U}J, d^2_{U}J]
Además se puede acoplar fácilmente con el optimizador fmincon de MATLAB
Umax = 1;
Umin = -1;
fmincon(@(U)Control2Functional(iP,U),U0, ... % U0 initial guess
[],[], ... % A*U = 0
[],[], ... % A*U > 0
Umin,Umax, ... % Umin<U<Umax
[]); ... % G(U) < 0
Indirect Methods
Resolución de ODE
Tanto en el cálculo de la dinámica directa como en la dinámica adjunta se debe resolver una ODE.
Esta pieza del algoritmo es intercambiable. Lo más importante es que tenga una interfaz determinada.
Indirect Methods
Herramientas las ODE
% DyCon Toolbox Syntax
Y = sym('y',[2 1]); U = sym('u',[1 1])
% Vector dynamics
F = @(t,Y,U) [ Y(1)*Y(2) + U(1) ; ...
-Y(2) + U(2) ] ;
% Create a ode object
dynamics = ode(F,Y,U);
dynamics.Solver = @ode45% Interfaz Obligatoria
dynamics.InitialCondition = [0;-1];
[tspan ,Ysolution] = solve(dynamics)Indirect Methods
Diferentes Solvers
- ode45 - MATLAB implentation
- ode23 - MATLAB implentation
- ode23tb - MATLAB implentation
- rk4 - simple
- eulere - simple
- euleri - simple
% change the solver
dynamics.Solver = @ode45Indirect Methods
Herramientas específicas
- HUM - Implementación de Umberto y Víctor del método del gradiente para problemas lineales sin restricciones
- LQR - Implementación de Dario, utilizando las herramientas de MATLAB para problemas LQR
- InverseProblem - Implementacion de Azahar de Problemas tipo:
\min_{Y(0)} J \\
J = \int ( y(T) - y_{Target}) dx + \gamma \int |y(0)| dx \\
s.t. \ \ \dot{y} = A*y \ \
- LsNorm - Implementacion de Umberto para problemas tipo:
\min_{U} J \\
J = ||Y(T) - Y_T||_{L^2} + \gamma \int || U ||_{L^s}dt \\
s.t. \ \ \dot{Y} = A*Y + B^U\ \
Posibles Extensiones
Posibles Extensiones
Desarrollar un método propio para discretizar todo el problema, y calcular sus derivadas discretas (como AMPL)
Dentro del la clase Pontryagin tenemos todo lo necesario para poder calcular las derivadas discretas.
Esto nos ayudaría a extender Dycon Toolbox a métodos indirectos
AMPL IPOPT
Indirect Methods
Direct Methods
Posibles Extensiones
Desarrollar un método propio para discretizar todo el problema, y calcular sus derivadas discretas (como AMPL)
Dentro del la clase Pontryagin tenemos todo lo necesario para poder calcular las derivadas discretas.
Esto nos ayudaría a extender Dycon Toolbox a métodos indirectos
Indirect Methods
Direct Methods
AMPL IPOPT
Posibles Extensiones
Acoplar con IPOPT
El enlace con FMINCON de MATLAB esta hecho pero este tipo de problemas funcionan mejor con los métodos directos (Problemas totalmente discretizado)
Posibles Extensiones
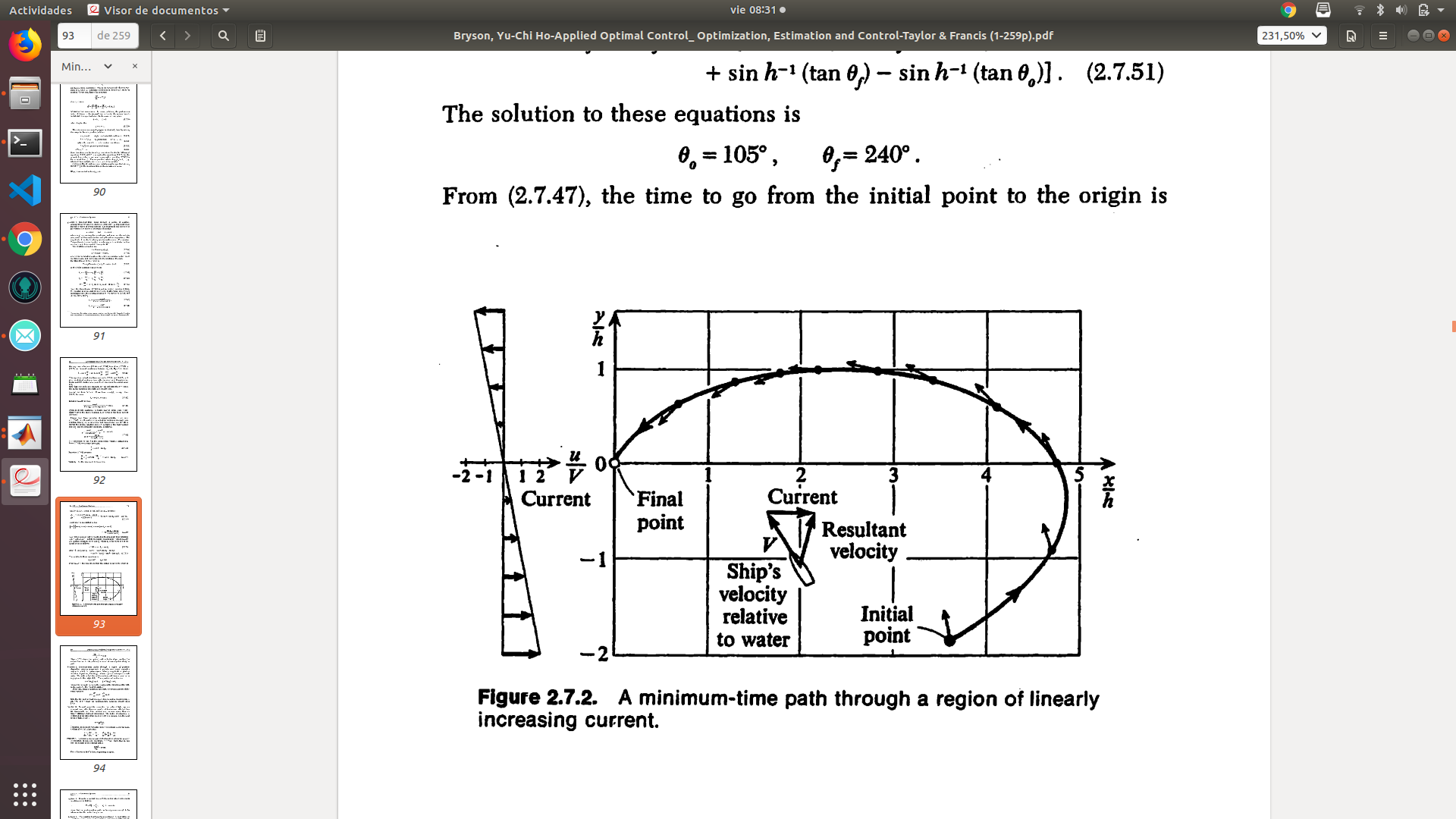
Crear tutoriales sobre problemas clásicos: braquistocrona, Principio de Fermat, ...
Posibles Extensiones
Agregar los métodos del gradiente que permiten un tiempo final variable
Book: Applied Optimal Control: Optimization Estimation and Control
Posibles Extensiones
Utilizar PDE Toolbox en MATLAB. Solo para obtener las matrices de Mass, Stiffnex, ...
-
K is the stiffness matrix, the integral of the c coefficient against the basis functions.
-
M is the mass matrix, the integral of the m or d coefficient against the basis functions.
-
A is the integral of the a coefficient against the basis functions.
-
F is the integral of the f coefficient against the basis functions.
-
Q is the integral of the q boundary condition against the basis functions.
-
G is the integral of the g boundary condition against the basis functions.
-
The H and R matrices come directly from the Dirichlet conditions and the mesh.
FEM = assembleFEMatrices(model)Posibles Extensiones
Utilizar PDE Toolbox en MATLAB. Solo para obtener las matrices de la dinámica
Heat Equation with some no lineal term in DyCon Logo
Posibles Extensiones
Añadir funcionalidades desarrolladas en el proyecto Elkartek
Umberto esta implementado de forma independiente junto Mondragon, métodos para buscar regiones de estabilidad.
La sintaxis de los scripts son muy compatibles con la sintaxis para definir ODE en DyCon Toolbox
Dado una dinámica y un punto de estabilidad, recuperan una región de estabilidad.
Posibles Extensiones
Tareas y Personas
| Persona | Tarea |
|---|---|
| Dario | Desarrollar un método propio para discretizar todo el problema, y calcular sus derivadas discretas (como AMPL) |
| Domenec | Utilizar PDE Toolbox en MATLAB. Solo para obtener la función de la dinamicas |
| Umberto | Proyecto Elkartek |
| Dongnam | Optimización de la arquitectura de software, y testeo |
| ? | Problemas Clásicos |
DyCon Toolbox - Revisión - Junio 2019
By Deyviss Jesus Oroya



