Regularized Policy Gradients
(Zhao, etc. 15)
By Denis and Steve
Why You Should Care

GOOD
BAD
Policy Gradient (PG) +Parameter-Based Exploration (PE) = PGPE
PG
Value Function- Gradient Ascent
- Pros: Easy to incorporate domain knowledge, less parameters, model-free
-
Problem: Stochasticity in policy
- High variance in noisy sample.
- Variance increases along T
- Example: Williams '92 REINFORCE

PGPE
- Linear, Deterministic Policy
- Parameters sampled from prior distribution at START of trajectory. Draws with hyperparameter ⍴.
- Pros:
- solves policy initialization problem
- reduces variance (single sample, T)
- Issue: still variance...
- Example: Sehnke '08 (and Peters)


Baseline
Regularization
Experiments
Baseline

Types
- Guess - (Jellybeans)
- Zero Rule - (Titanic)
- For RL, the obvious baseline is Average Reward
- Optimal baseline = minimize variance + not introduce bias
Literature
- Williams '92 (variance growth cubical along h and quadratically along with reward. can only be single number in episodic REINFORCE)
- Greensmith '04 (basis function challenge)
- Peters '08 (separate baseline for each coefficient gradient )
- Zhao '11 (optimal baseline PGPE > optimal REINFORCE)
Their baseline


Take over Sample D
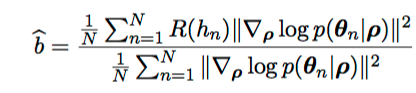
Solve
What's interesting?
- Accounts for correlation
- Nothing much in this paper
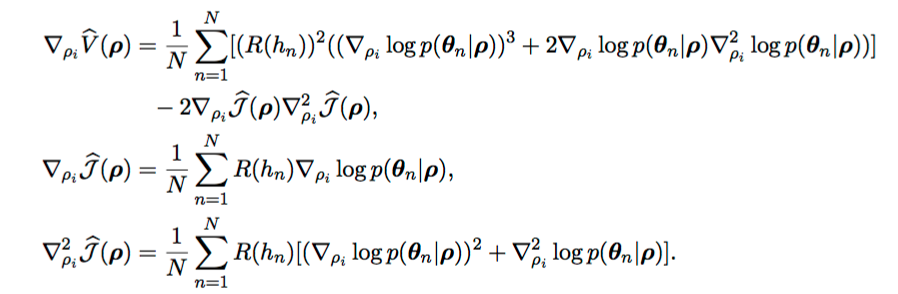
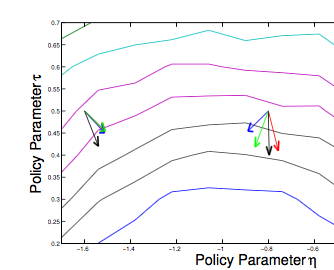
Variance Regularization
- Why
- How
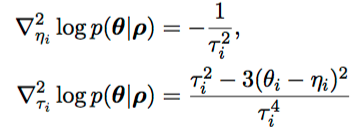
- Math
Why Regularize Variance?
-
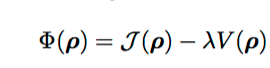
Maximize reward while reducing variance in policy gradient
-
Makes changes to ρ smoother
-
Can still subtract baseline from R(h) for best results
New Objective Function
1.
2.

Additional Equations

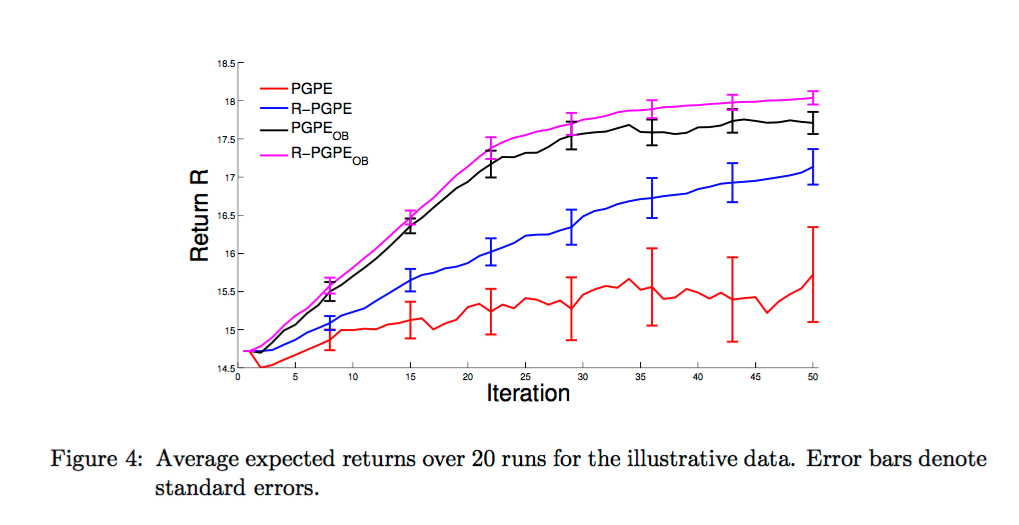
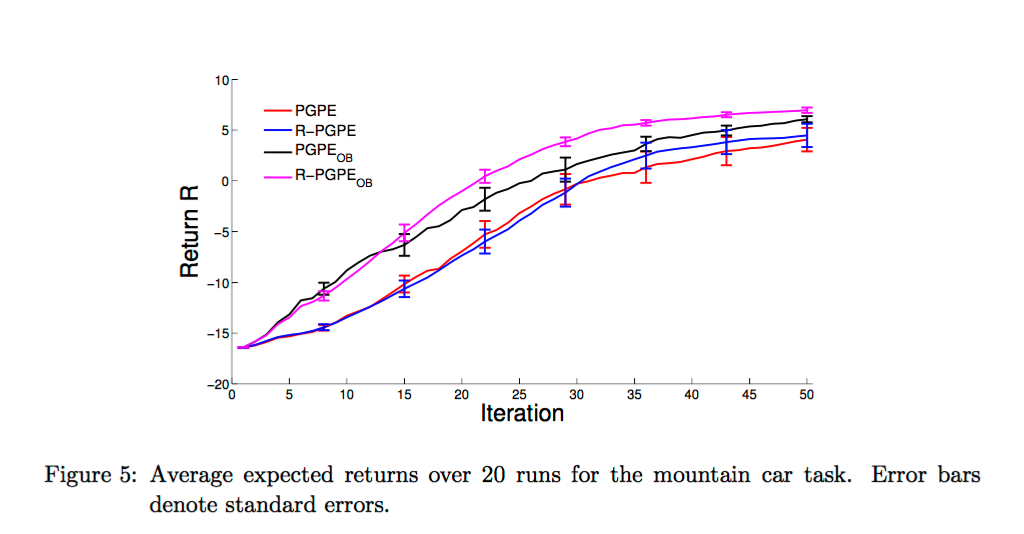
Experiments
Performance
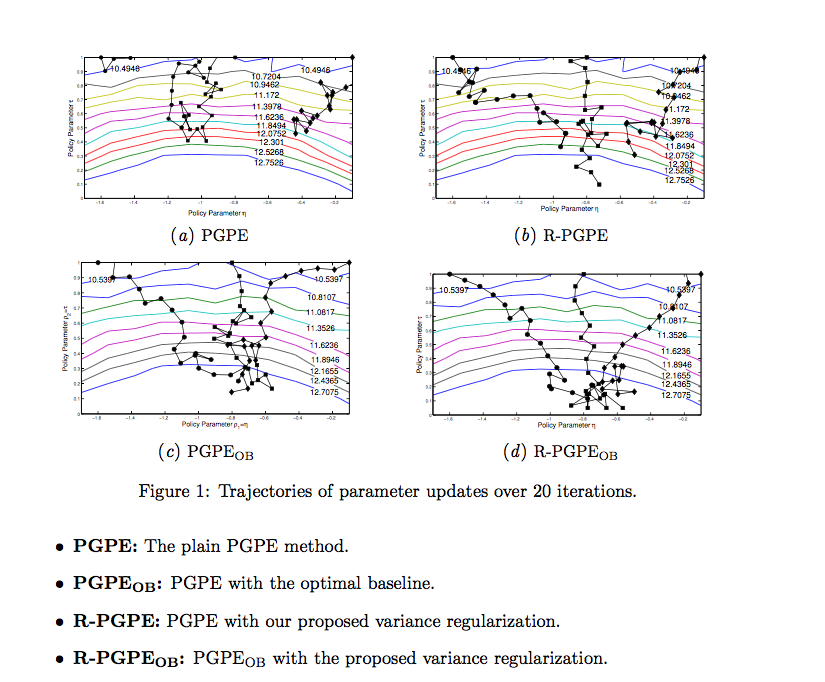
Performance Continued
Mountain Car

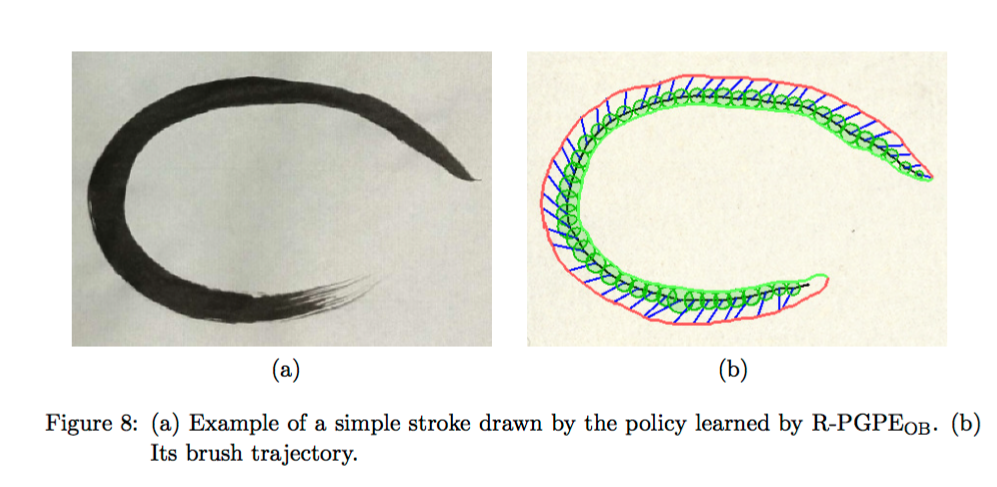
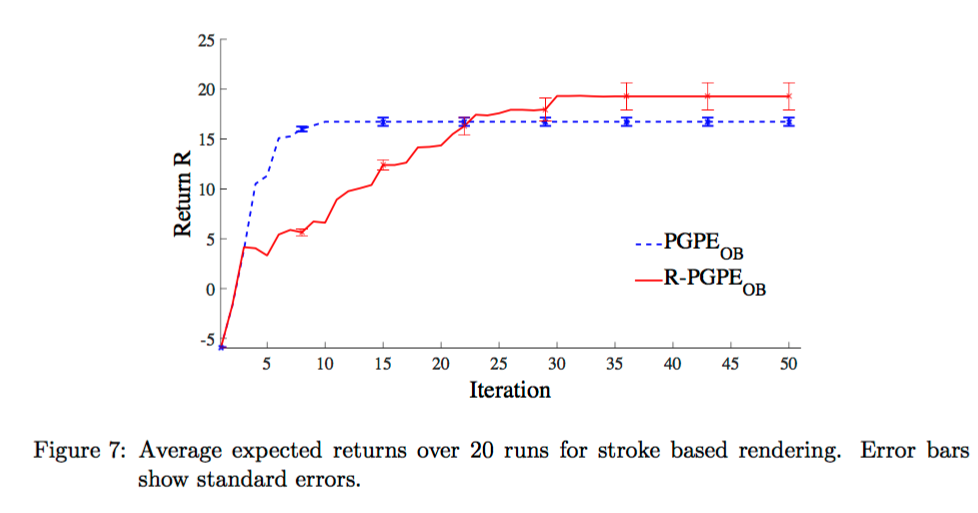
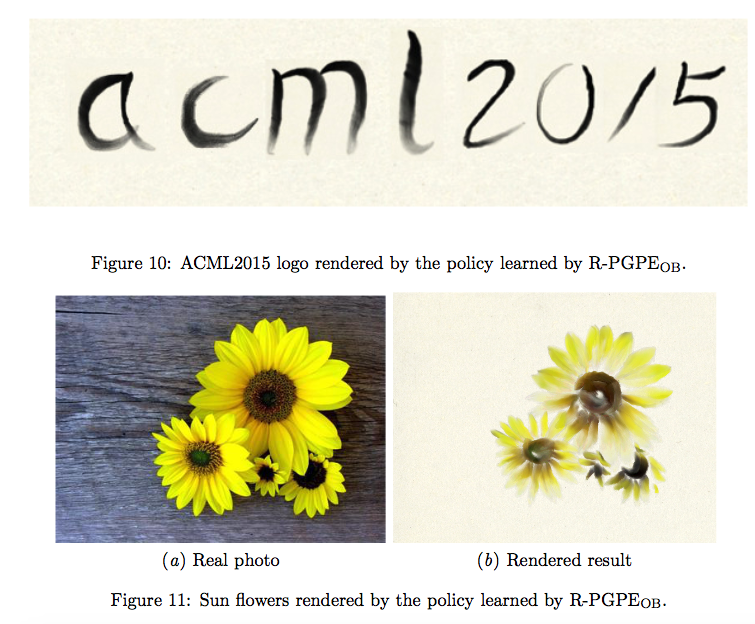
Stroke Rendering
More Examples
Follow-up Work
- Replicate for Off Policy
- Theoretical proof of convergence for VR
- Combine with other regularized PG methods
Conclusion
- We can reduce variance
- Always use a baseline in practice
Regularized Policy Gradients
By dpeskov



