Adaptación de vehículos aéreos no tripulados para Sensado remoto de cultivos.
CONTENIDO
- INTRODUCCIÓN
- PLANTEAMIENTO DEL PROBLEMA Y JUSTIFICACIÓN
- OBJETIVOS
- ESTADO DEL ARTE
- METODOLOGÍA
- RESULTADOS
- BIBLIOGRAFÍA
introducción




PLANTEAMIENTO y JUSTIFICACIÓN del problema







objetivo general
Desarrollo de un sistema de sensado remoto con vehículos aéreos no tripulados y equipados con medidores especializados de bajo costo, lo que permitirá mejorar la toma de decisiones por parte del agricultor colombiano.
objetivos especificos
-
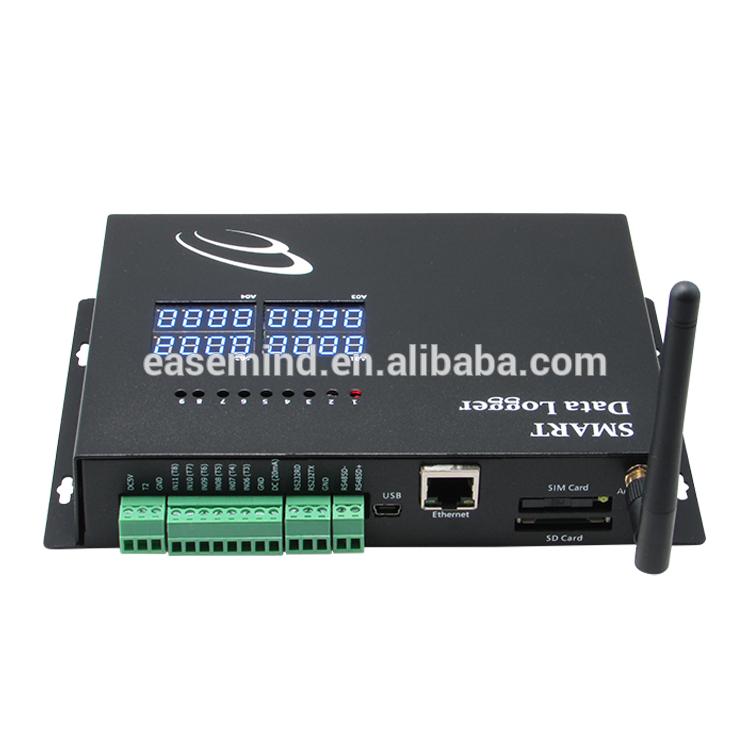
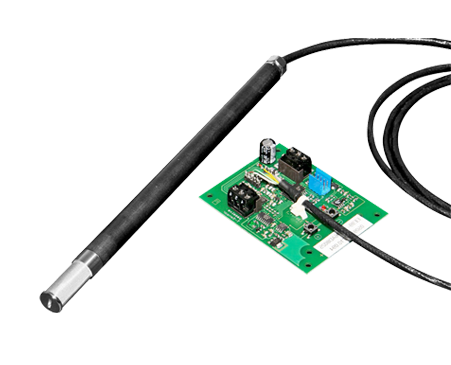
Ensamblar un robot con medidores que permitan el sensado de cultivos implementando algoritmos que garanticen la obtención de una estadística confiable.
-
implantar algoritmos de vuelo autónomo utilizando comando AT compatibles con las capacidades y características del dron multirrotor, que permita realizar el muestreo sobre cultivos.
-
Desarrollar una interfaz de captura, almacenamiento y procesamiento de la información obtenida a través de los sensores de intensidad de radiación solar, humedad, presión atmosférica , altitud y temperatura en las diferentes zonas de estudio en tiempo real y modo offline
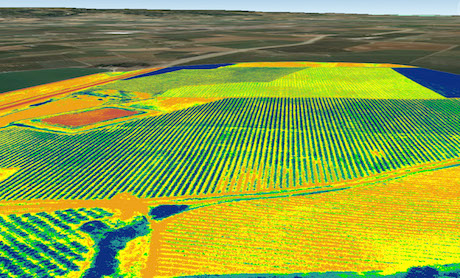
estado del arte

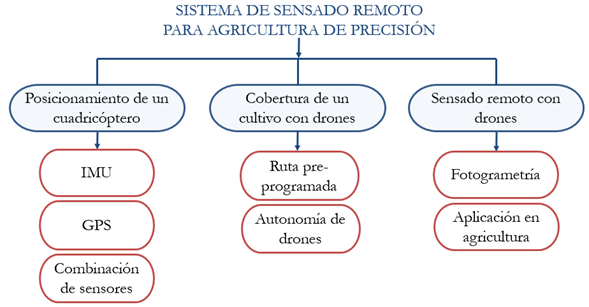
Fuente: Propia
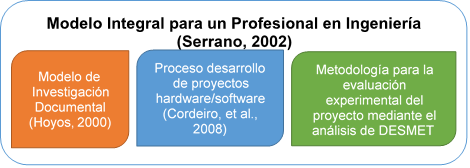
METODOLOGIA
resultados esperados
Se espera la construcción de dispositivo electrónico con hardware e interacción de software open source que permita el sensado de cultivos agrícolas para obtener información detallada del crecimiento, deterioro y evolución del cultivo, sin intervención directa al alcance de pequeños y medianos agricultores.


REFERENCIAS BIBLIOGRÁFICAS
Al Saeed, I. (2011). Importance of Emerging Technologies in Society for Futuring & Innovation. Journal of Applied Global Research, 12–22.
Albaker, B. M., & Rahim, N. A. (2009). A survey of collision avoidance approaches for unmanned aerial vehicles. In 2009 International Conference for Technical Postgraduates (TECHPOS) (pp. 1–7). IEEE. https://doi.org/10.1109/TECHPOS.2009.5412074
Bongiovanni, R., & Lowenberg-Deboer, J. (2004). Precision agriculture and sustainability. Precision Agriculture, 359-387.
Brutto, M. L., Borruso, A., & D'Argenio, A. (2012). UAV systems for photogrammetric data acquisition of archaeological sites. International Journal of Heritage in the Digital Era, 1, 7-14.
Coetzee, L., & Eksteen, J. (2011). The Internet of Things - promise for the future? An introduction. In IST-Africa Conference Proceedings. IEEE.
Chen, G., & Kotz, D. (2000). A Survey of Context-Aware Mobile Computing Research. Time, 3755(TR2000-381), 1–16. https://doi.org/10.1.1.140.3131
Cordeiro, L., Mar, C., Valentin, E., Cruz, F., Patrick, D., Barreto, R., & Lucena, V. (2008). An agile development methodology applied to embedded control software under stringent hardware constraints. ACM SIGSOFT Software Engineering Notes, 5.
Nodo 2017
By Häzël PG
Nodo 2017
ADAPTACIÓN DE VEHÍCULOS AÉREOS NO TRIPULADOS PARA SENSADO REMOTO DE CULTIVOS.




