










Jd Fiscus
Standard Nerd
Use cases
Automotive
Amazon
Fetch Robotics
iRobot
Boston Robotics (Spot)
Volunteering
Outreach to youth
AI-Enabled Products
AWS (Alexa, DeepLens, DeepRacer)
Google Coral
Nvidia Jetson Nano
RaspberryPI
Text
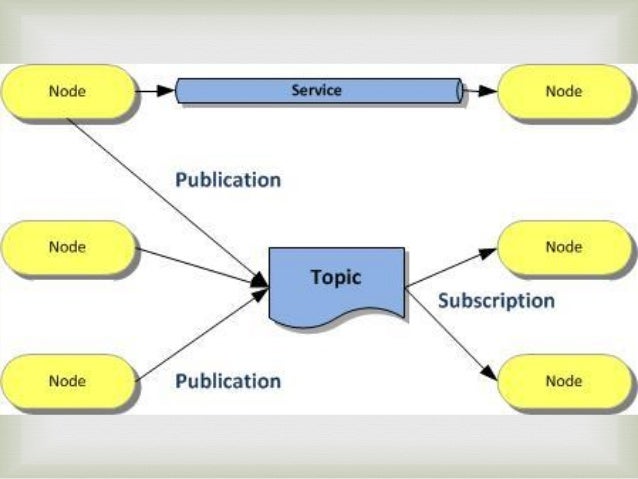
Source: awesomeopensource.com
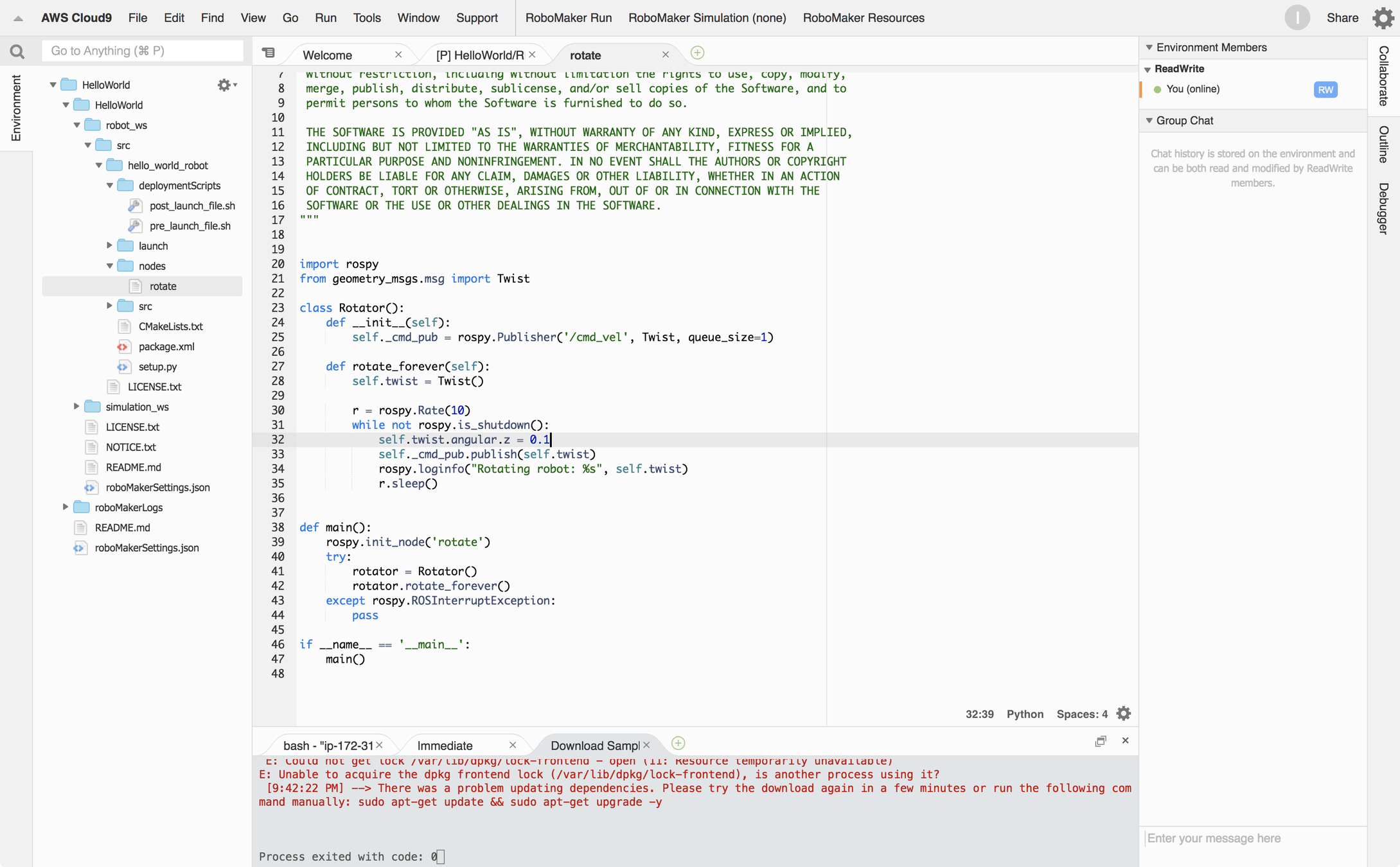
$ rosrun [package_name] [node_name]
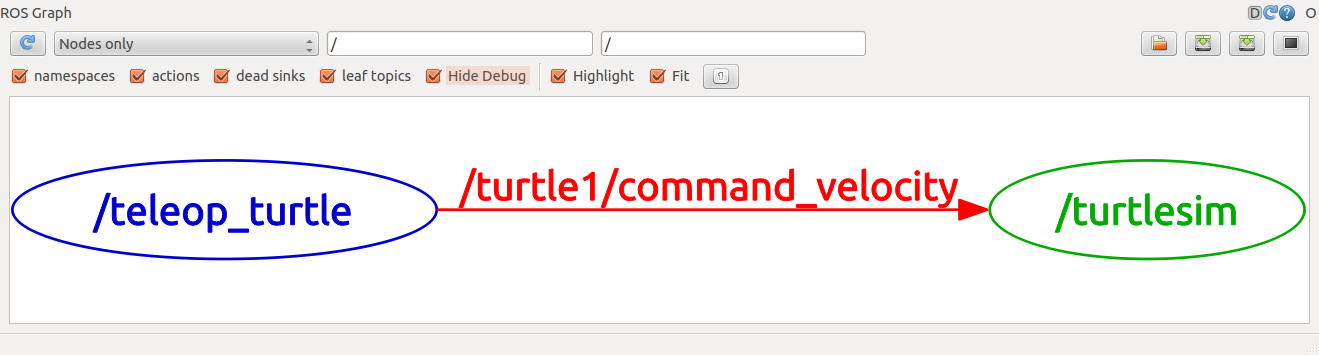
$ rostopic list
$ rostopic echo /[topic_name]
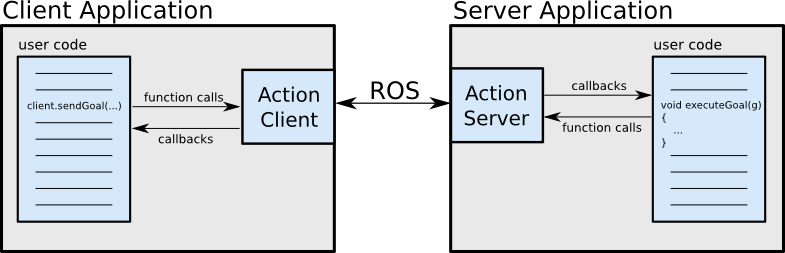
Source: http://wiki.ros.org/actionlib
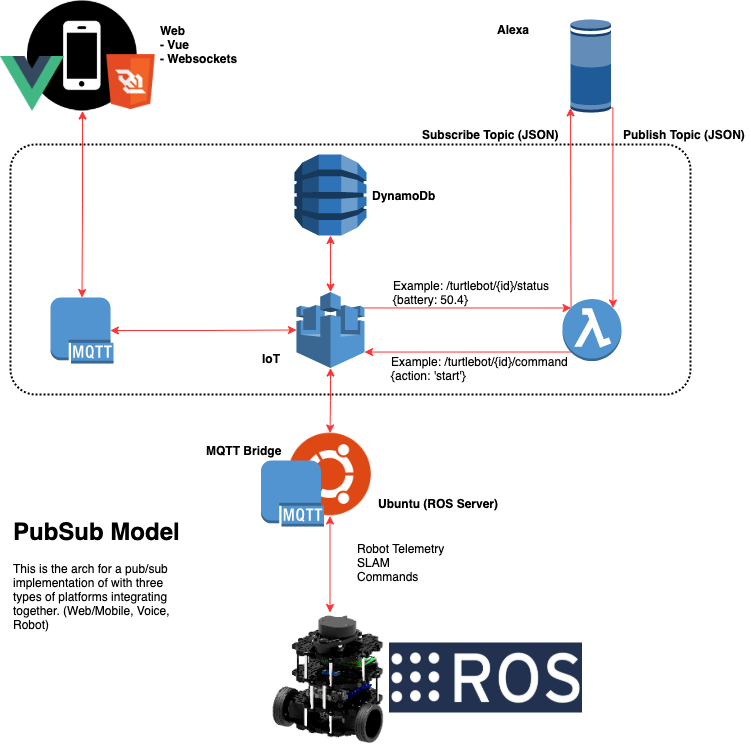
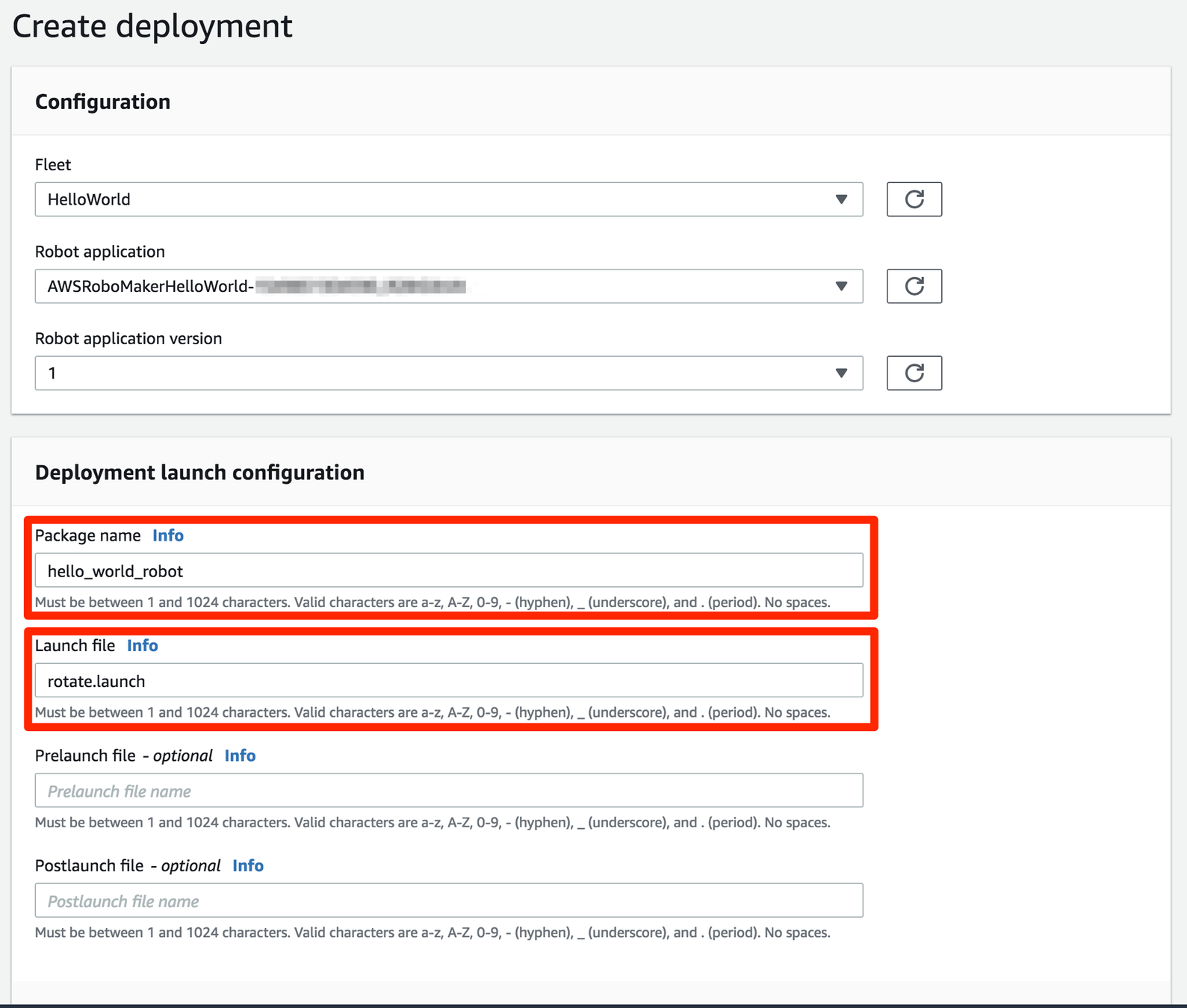
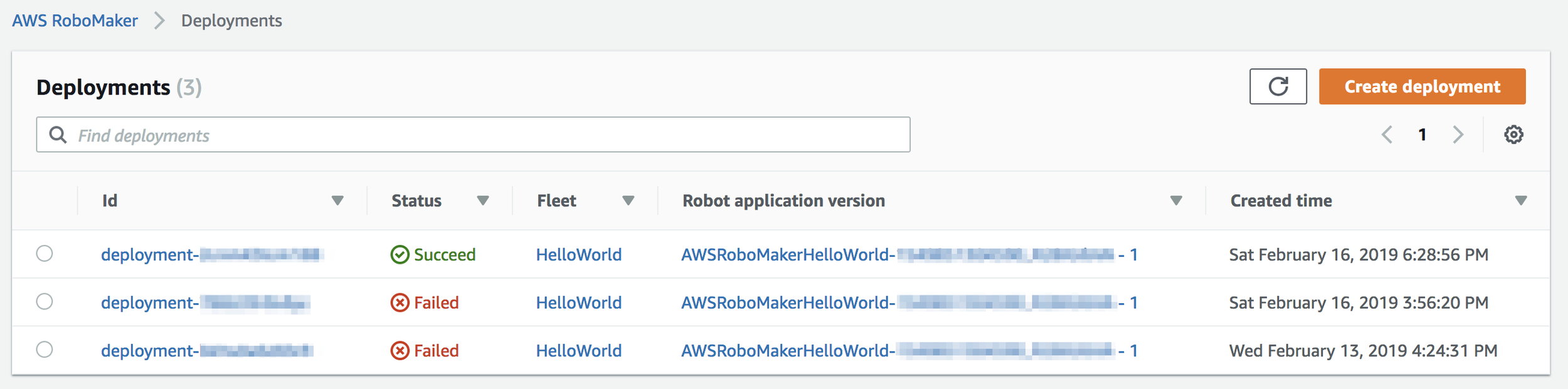
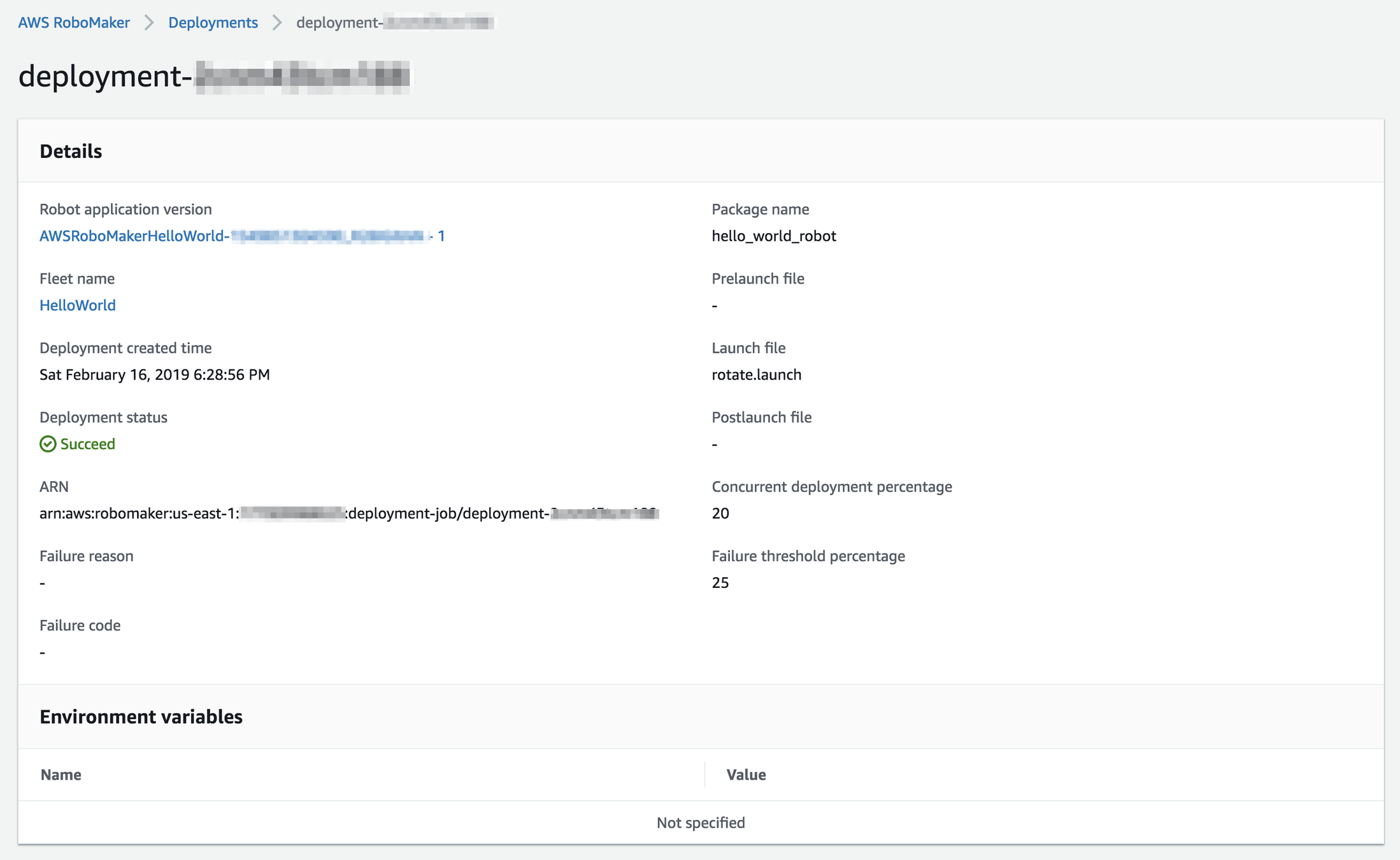
Cloud ROS
Extensions
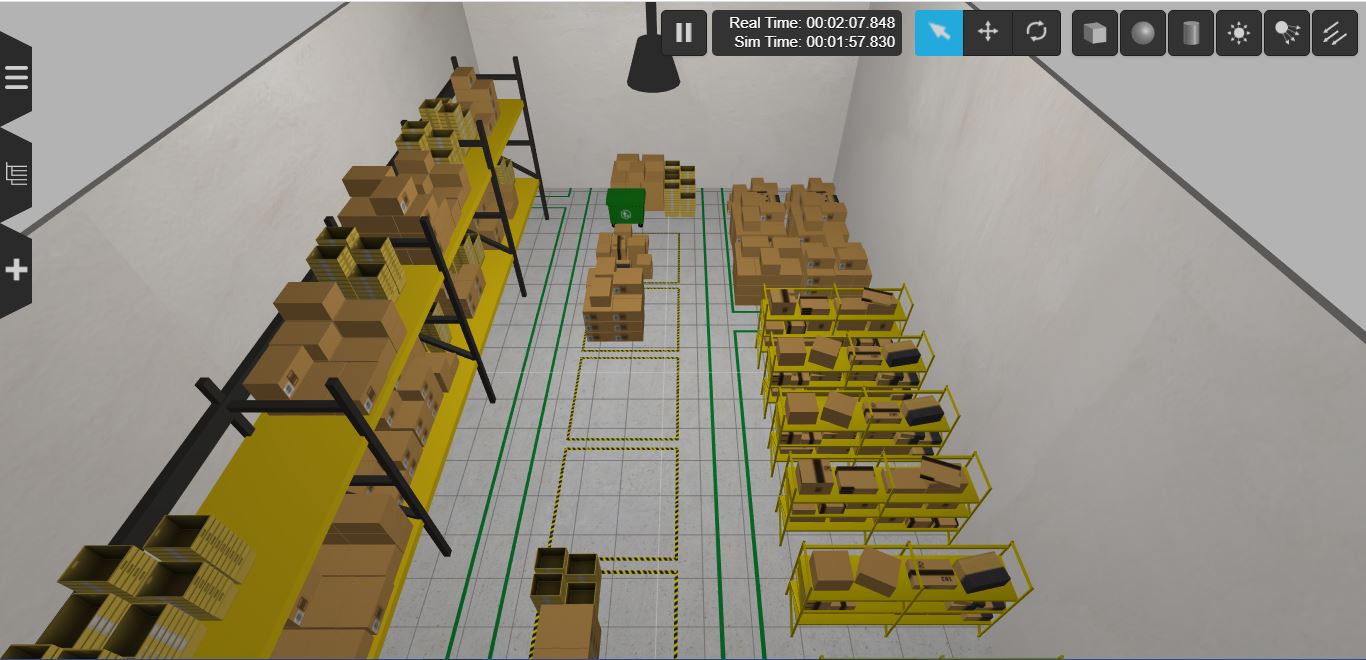
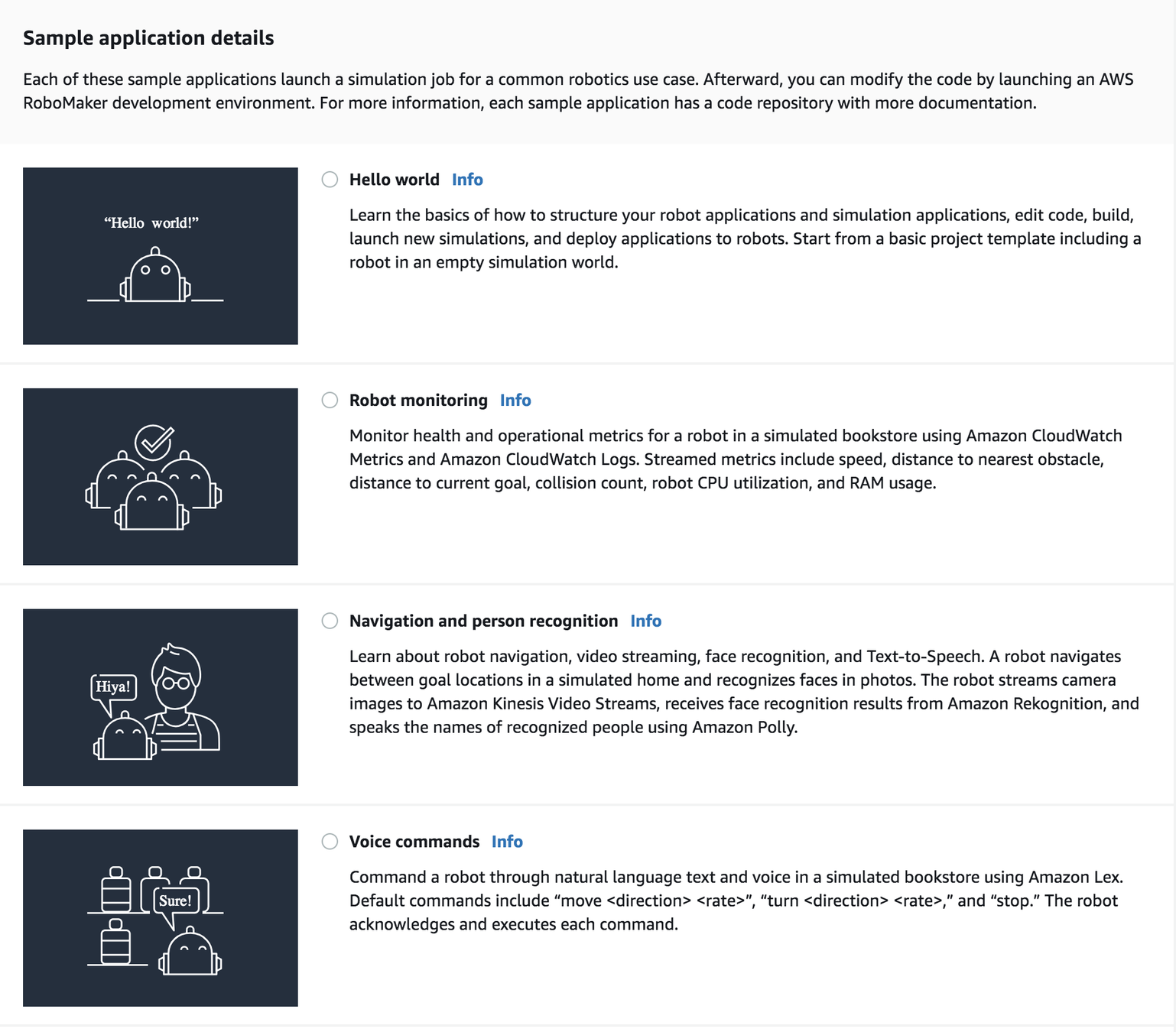
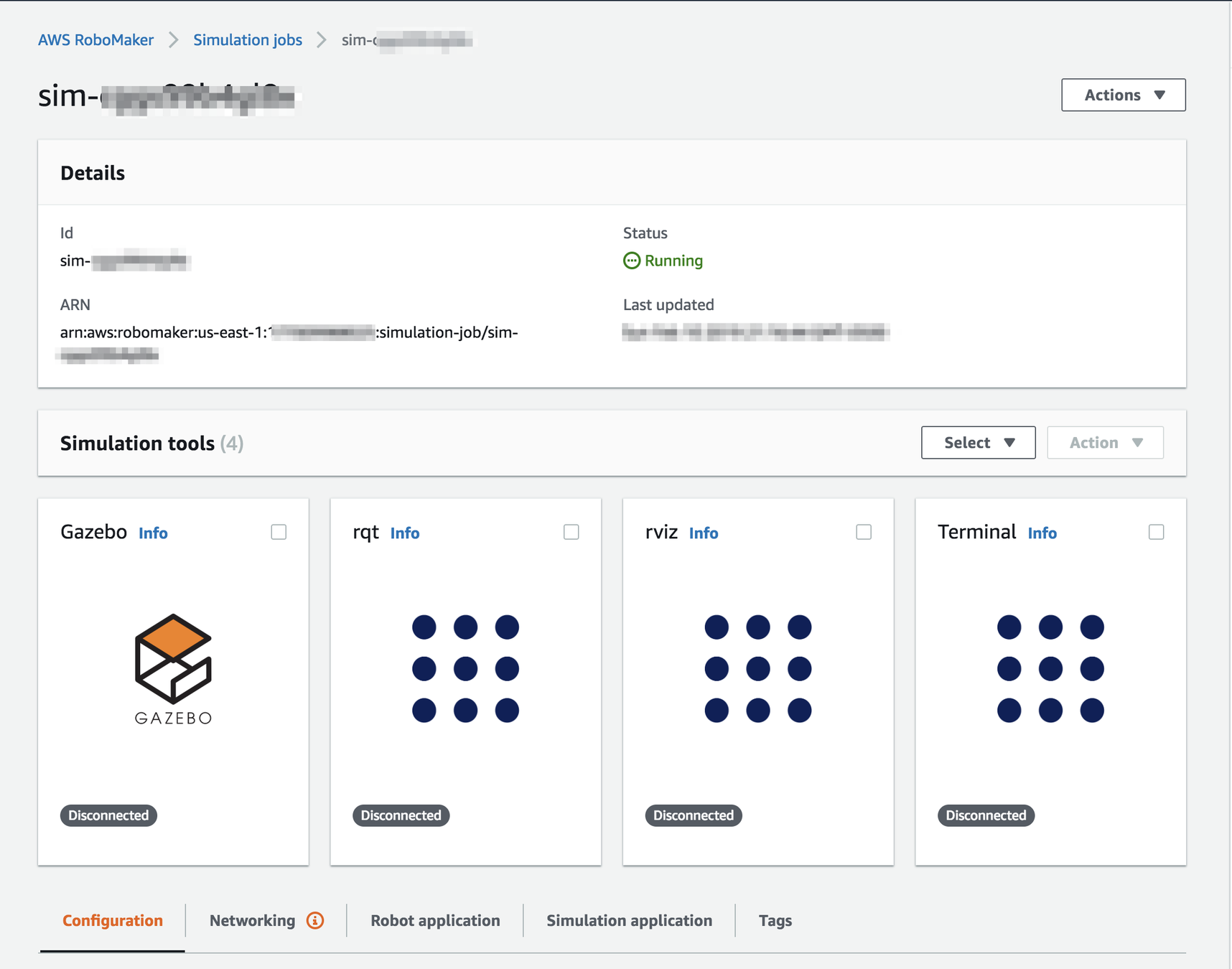
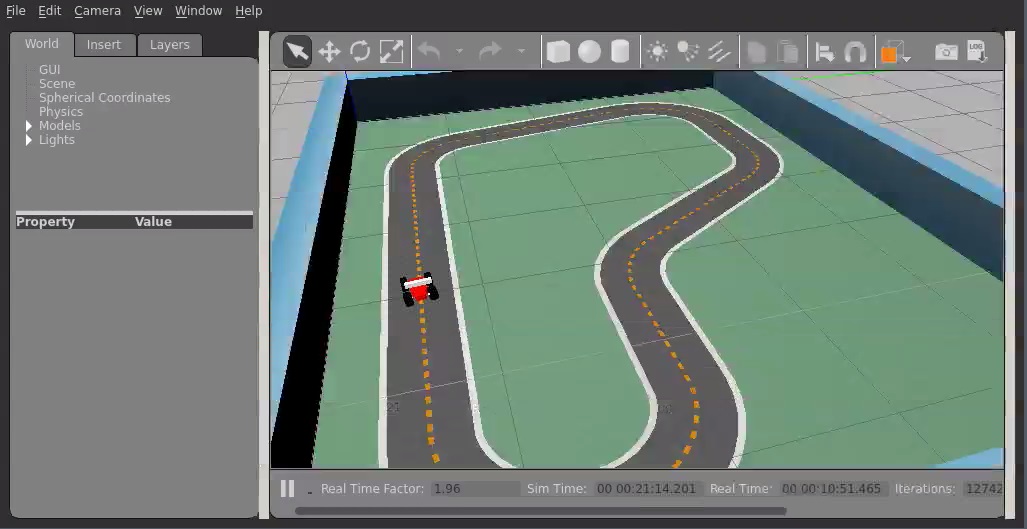
Simulate
Development
Fleet Management
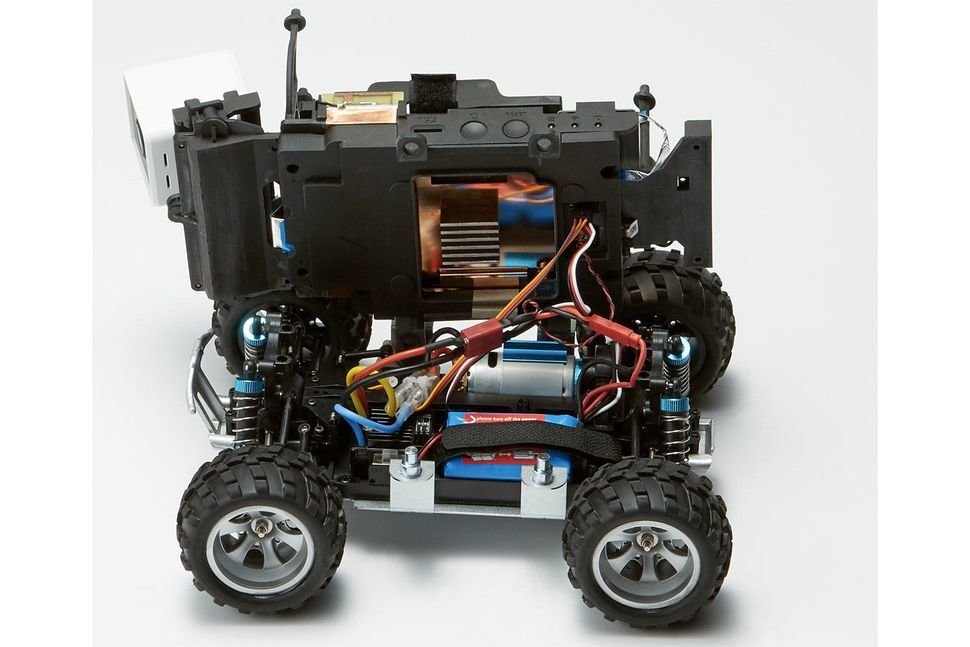
CAR: 18th scale 4WD with monster truck chassis
CPU: Intel Atom™ Processor
MEMORY 4GB RAM
STORAGE: 32GB (expandable)
WI-FI: 802.11ac
CAMERA: 4 MP camera with MJPEG
SOFTWARE: Ubuntu OS 16.04.3 LTS, Intel® OpenVINO™ toolkit, ROS Kinetic
PORTS: 4x USB-A, 1x USB-C, 1x Micro-USB, 1x HDMI
SENSORS: Integrated accelerometer and gyroscope
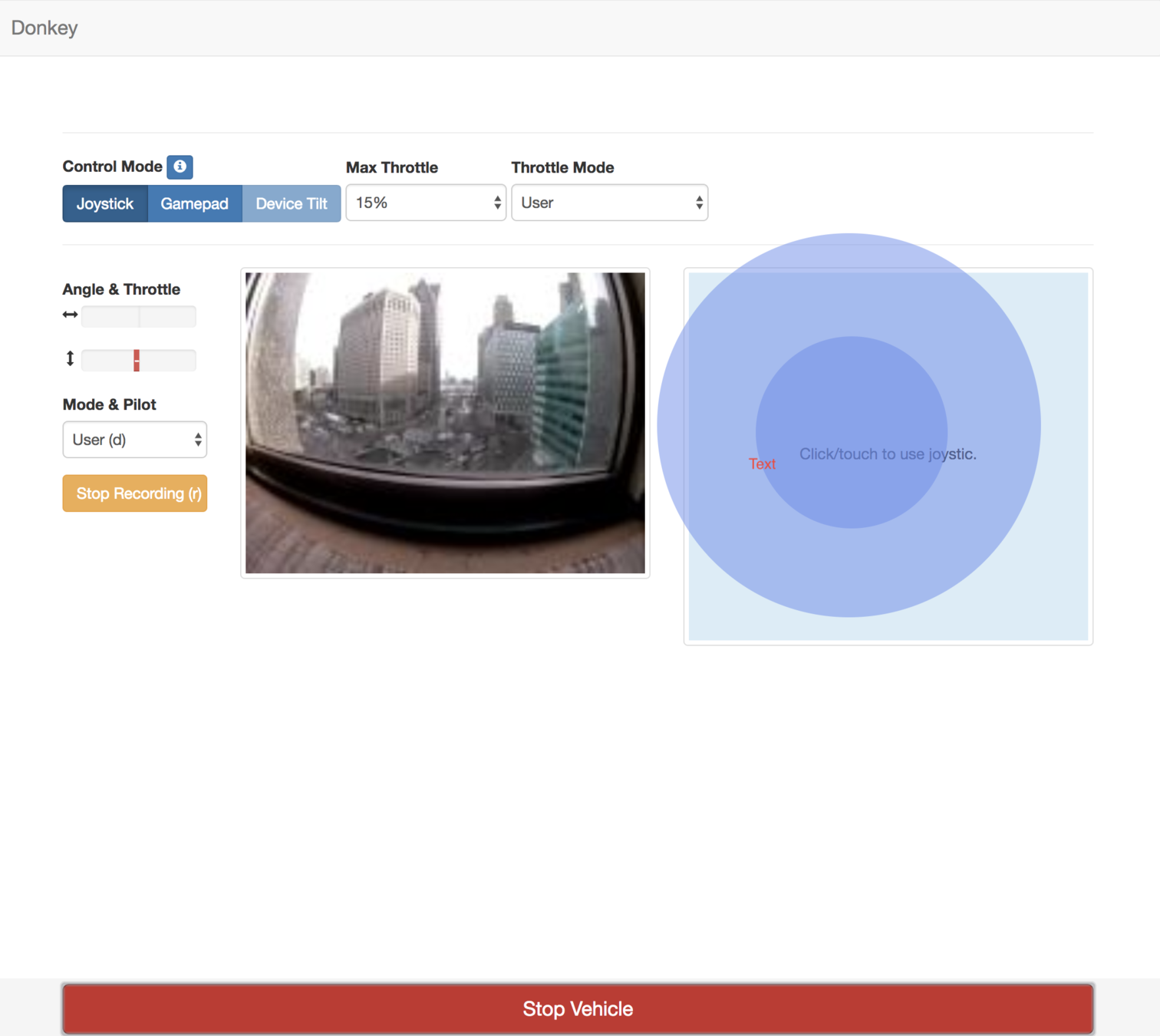
Source: http://www.donkeycar.com/
RC CAR
Raspberry Pi
Python
Resources
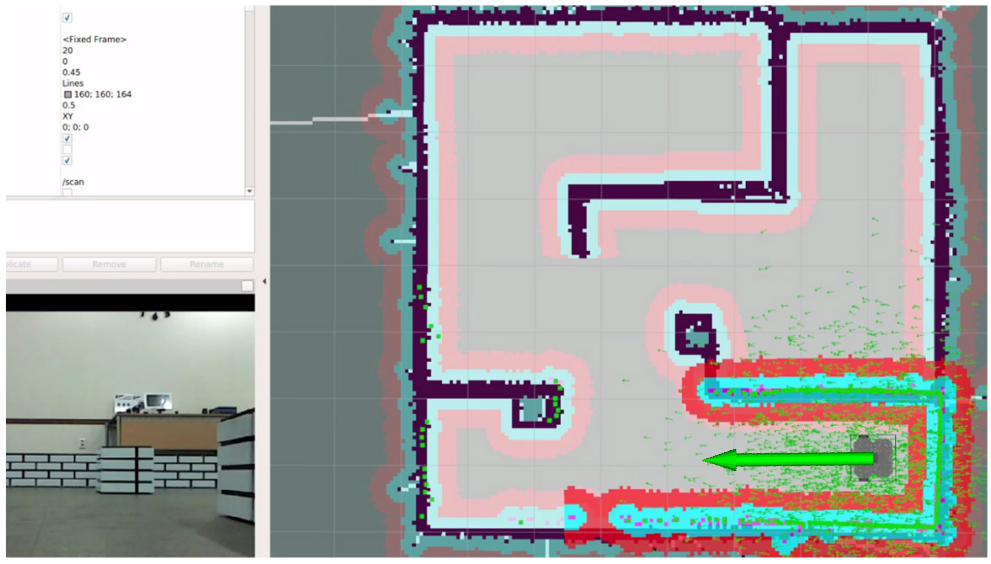
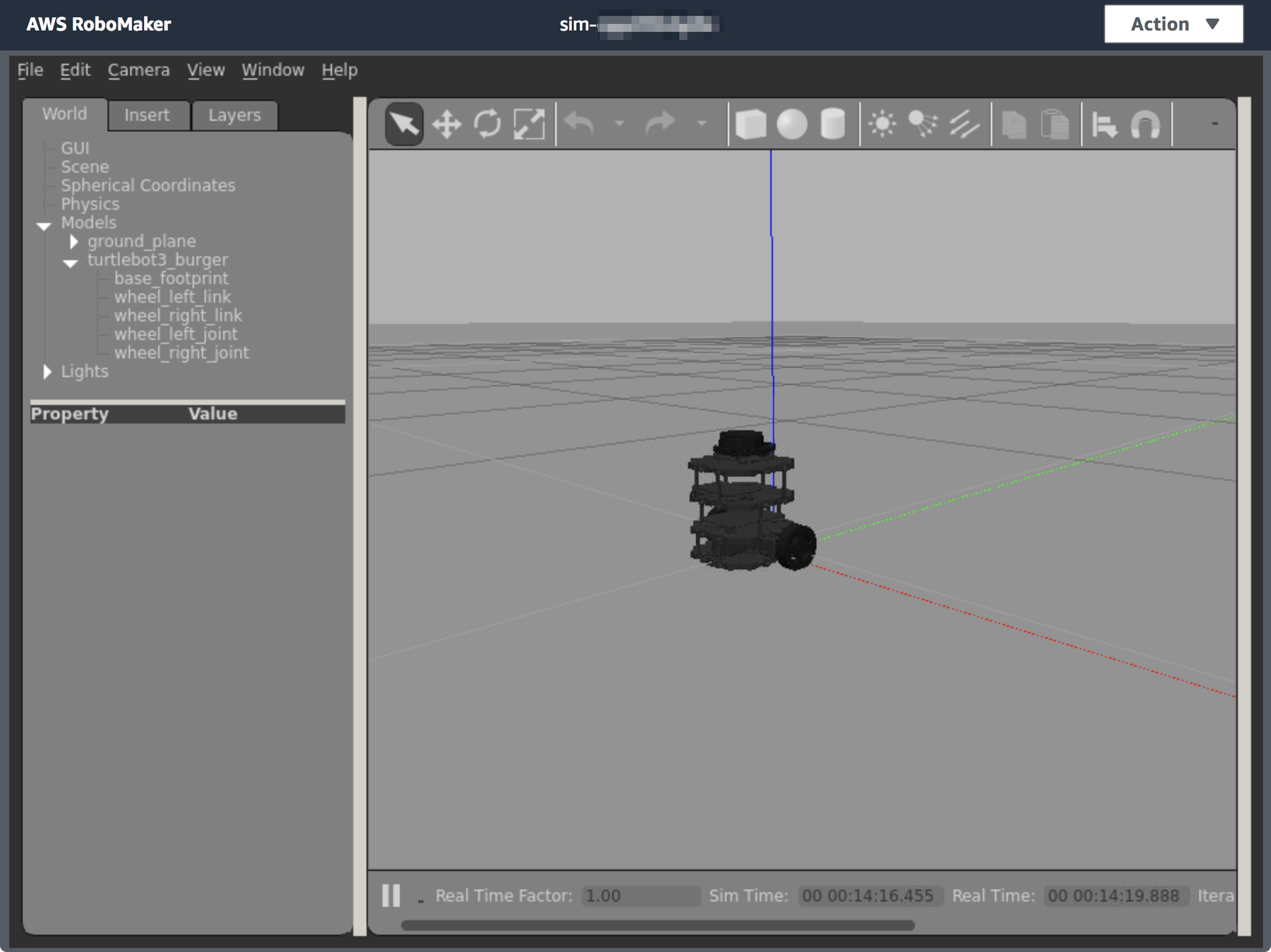
ROS & Turtlebot
- https://www.udacity.com/course/robotics-software-engineer--nd209
- https://www.robotigniteacademy.com/
- http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/
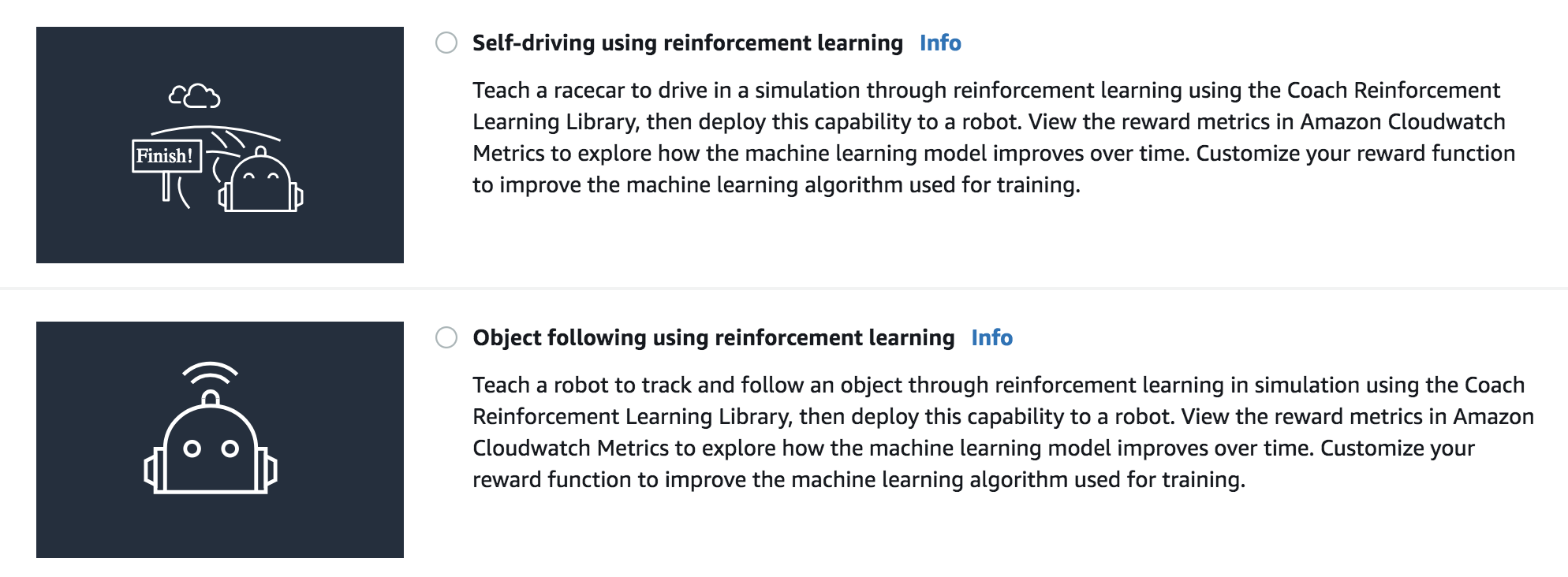
AWS RoboMaker & DeepRacer
- https://docs.aws.amazon.com/robomaker/latest/dg/getting-started.html
- https://github.com/aws-samples/aws-deepracer-workshops
- https://github.com/aws-robotics/aws-robomaker-sample-application-deepracer
Donkey RC
By Jd Fiscus
Presentation on ROS, AWS RoboMaker, DeepRacer




