Aprendizaje Reforzado:
IA para la toma de decisión secuencial
Sesión II
Jacobo G. González León
Agenda
- Caso de estudio
- Proceso de decisión Markoviana
- Aprendizaje reforzado
- Q-learning
- Deep Q-learning
- Ejemplo: MountainCar
Ágora

Caso de estudio: Navegación terrestre



¿Cómo bajar esta montaña de la mejor manera?
Aprendizaje supervisado
Aprendizaje reforzado

Caso de estudio: Navegación lunar
¿Cómo explorar cualquier planeta la luna ?
Caso de estudio: Navegación lunar
¿Cómo explorar cualquier planeta la luna ?
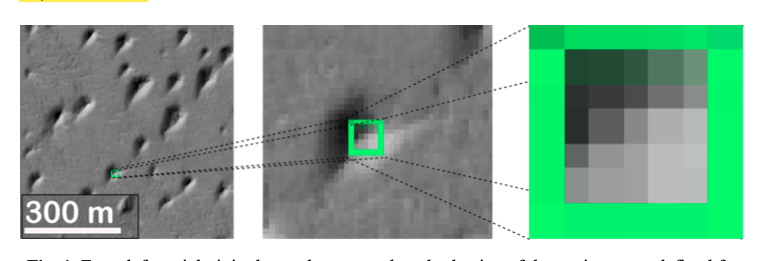
Mapa
Caso de estudio: Navegación lunar
¿Cómo encontrar ese mapa?
Aprendizaje supervisado
- El "maestro" indica al agente la respuesta esperada
- El agente crea un modelo basado en sus respuestas y las esperadas \(f(y,\hat{y})\)
Aprendizaje sensitivo-al-costo
- El entorno proveé una señal de recompensa \(r(s,a)\)
- Aplicación:
- Optimización de comportamiento
Aprendizaje reforzado
- El entorno proveé el valor de su estado, dada su acción \(q_{\pi}(s,a)\)
- ¿Qué tan bueno es -10.45?
- Necesidad de exploración
Aprendizaje reforzado
Problemas
Soluciones
\(s_{0,0}\)
\(s_{1,0}\)
\(s_{2,0}\)
\(s_{3,0}\)
\(s_{4,0}\)
\(s_{0,1}\)
\(s_{1,1}\)
\(s_{2,1}\)
\(s_{3,1}\)
\(s_{4,1}\)
\(s_{0,2}\)
\(s_{1,2}\)
\(s_{2,2}\)
\(s_{3,2}\)
\(s_{4,2}\)
\(s_{0,3}\)
\(s_{1,3}\)
\(s_{2,3}\)
\(s_{3,3}\)
\(s_{4,3}\)
\(s_{0,4}\)
\(s_{1,4}\)
\(s_{2,4}\)
\(s_{3,4}\)
\(s_{4,4}\)
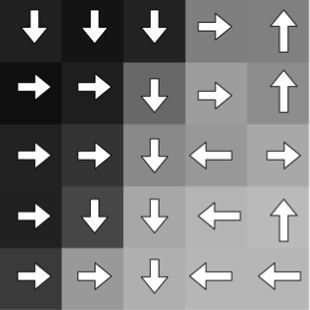
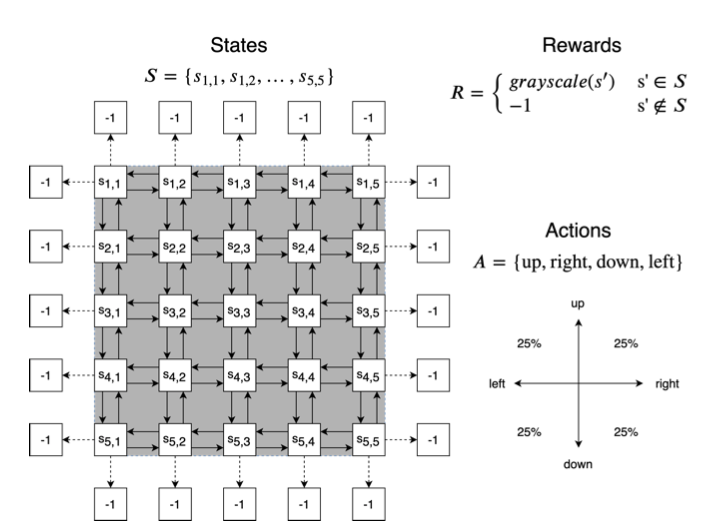
Espacio de estados
Entorno
↓
↑
→
←
→
\(r=-100\)
\(r=-1000\)
\(r=1\)
\(r=1000\)
\(r=-1\)
Recompensas
Acciones
\(a_0\)
\(a_1\)
\(a_2\)
\(a_3\)
\(s_{0,0}\)
\(s_{1,0}\)
\(s_{2,0}\)
\(s_{3,0}\)
\(s_{4,0}\)
\(s_{0,1}\)
\(s_{1,1}\)
\(s_{2,1}\)
\(s_{3,1}\)
\(s_{4,1}\)
\(s_{0,2}\)
\(s_{1,2}\)
\(s_{2,2}\)
\(s_{3,2}\)
\(s_{4,2}\)
\(s_{0,3}\)
\(s_{1,3}\)
\(s_{2,3}\)
\(s_{3,3}\)
\(s_{4,3}\)
\(s_{0,4}\)
\(s_{1,4}\)
\(s_{2,4}\)
\(s_{3,4}\)
\(s_{4,4}\)
↑
\(a_0\)
→
\(a_1\)
→
\(a_1\)
↓
\(a_2\)
↓
\(a_2\)
←
\(a_3\)
↓
\(a_2\)
→
\(a_1\)
¿Cuánto vale la trayectoria \({V^*(s)}\) óptima)?
\({V^*(s)}\)
Value function
\(S\)
\(s_{0,1}\)
\(s_{0,2}\)
\(s_{1,2}\)
\(s_{2,2}\)
\(s_{3,2}\)
\(s_{0,3}\)
\(s_{1,3}\)
\(s_{3,3}\)
\(s_{1,1}\)
↑
→
→
↓
↓
←
↓
→
\(a_1\)
\(a_1\)
\(a_2\)
\(a_2\)
\(a_3\)
\(a_2\)
\(a_1\)
\(a_0\)
\(s_{0,0}\)
\(s_{1,0}\)
\(s_{2,0}\)
\(s_{3,0}\)
\(s_{4,0}\)
\(s_{0,1}\)
\(s_{1,1}\)
\(s_{2,1}\)
\(s_{3,1}\)
\(s_{4,1}\)
\(s_{0,2}\)
\(s_{1,2}\)
\(s_{2,2}\)
\(s_{3,2}\)
\(s_{4,2}\)
\(s_{0,3}\)
\(s_{1,3}\)
\(s_{2,3}\)
\(s_{3,3}\)
\(s_{4,3}\)
\(s_{0,4}\)
\(s_{1,4}\)
\(s_{2,4}\)
\(s_{3,4}\)
\(s_{4,4}\)
↑
\(a_0\)
→
\(a_1\)
→
\(a_1\)
↓
\(a_2\)
↓
\(a_2\)
←
\(a_3\)
↓
\(a_2\)
→
\(a_1\)
¿Cuáles son los mejores estados?
¿Cuáles son las mejores acciones?
MDP genera un problema secuencial
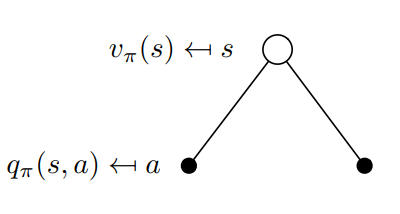
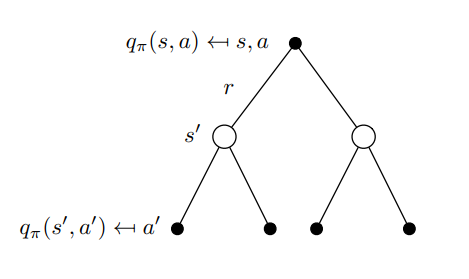
Action-Value function \(Q_{\pi}:S \times A→\R\)
\(q(s,a):E[R_{t+1}+{\gamma}{q(s_{t+1}, a_{t+1})} | S_t=s, A_t=a]\)
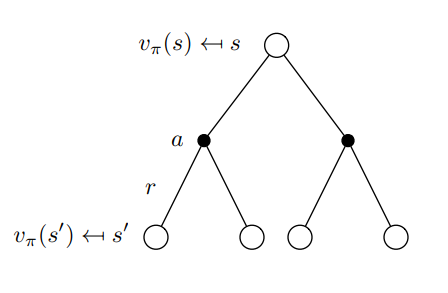
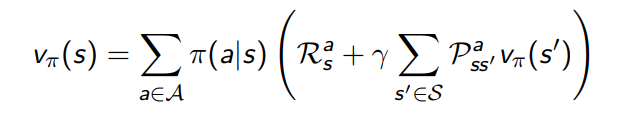
Value function \(V_{\pi}:S→\R\)
\(v(s):E[R_{t+1}+{\gamma}{v(s_{t+1})} | S_t=s]\)
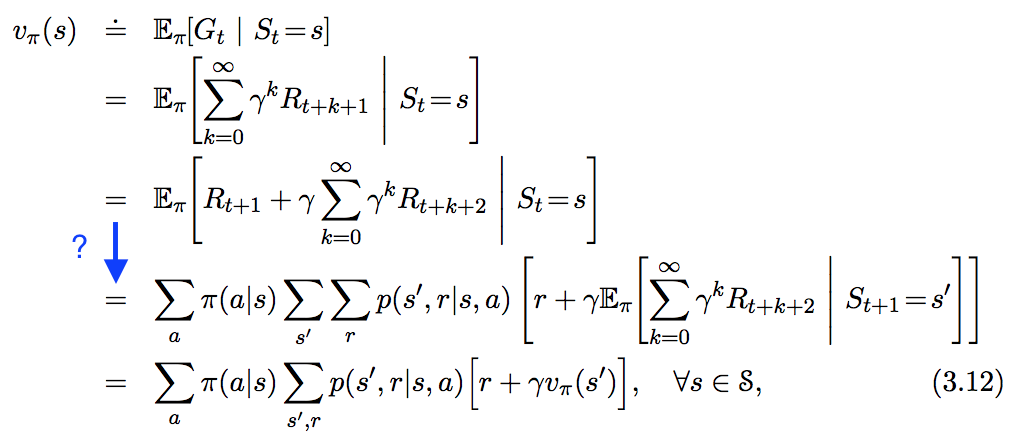
\(v_{\pi}(s):\Bbb{E}_{\pi}[R_{t+1}+{\gamma}{v(s_{t+1})} | S_t=s]\)
Función de valor \(V_{\pi}:S→\R\)


\(v(s):E[R_{t+1}+{\gamma}{v(s_{t+1})} | S_t=s]\)
Política: \(\epsilon\)-greedy
Ecuación de expectativas de Bellman

Función de acción-valor \(Q_{\pi}:S \times A→\R\)

\(q(s,a):E[R_{t+1}+{\gamma}{q(s_{t+1}, a_{t+1})} | S_t=s, A_t=a]\)
Política: \(\epsilon\)-greedy
Ecuación de expectativas de Bellman


Cálculo del valor de los estados
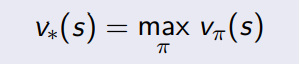
Valor óptimo
\({\pi}^{'}\)
\({\pi}\)
Value function
\(S\)
¿La política actual es mejor que la anterior?
¿Cuál es la política óptima?
Política: \(\epsilon\)-greedy
\(S\)
\(b\)
\(k_0\)
\(k_1\)
\(k_2\)
\(k_5\)
\(k_{4}\)
\(k_{3}\)
Nodo inicial artificial
Nodo final artificial

\(x_0\)
\(x_1\)
\(x_2\)
\(x_3\)
\(x_4\)
\(x_5\)
\(x^3_0\)
\(x^2_0\)
\(x^1_0\)
\(x^0_0\)
\(x^3_1\)
\(x^2_1\)
\(x^1_1\)
\(x^0_1\)
\(x^0_2\)
\(x^1_2\)
\(x^2_2\)
\(x^3_2\)
\(x^2_3\)
\(a\)
\(x^4_3\)
\(x^3_2\)
\(x^4_2\)
\(x^1_3\)
\(x^1_3\)
\(x^0_3\)
\(x^3_4\)
\(x^2_4\)
\(x^1_4\)
\(x^0_4\)
\(x^0_5\)
\(x^1_5\)
\(x^2_5\)
\(x^3_5\)
Sistema dinámico discreto de horizonte finito
\(k_0\)
\(k_1\)
\(k_2\)
\(k_5\)
\(k_{4}\)
\(k_{3}\)
Sistema dinámico discreto de horizonte finito
\(x_0\)
\(x_1\)
\(x_2\)
\(x_3\)
\(x_4\)
\(x_5\)
\(u_0\)
\(u_1\)
\(u_3\)
\(u_4\)
\(u_5\)
Donde: \(x_i\) estados, \(u_i\) controles (acciones), \(k_i\) tiempo
Espacio de estados \(S = x_0 \times x_1 \times x_1 \times x_3 \times x_4 \times x_5\)
Ejemplo: \(S = 10 \times 10 \times 10 \times 10 \times 10 \times 10 = 10^6 = 1,000,000\)
\(k_0\)
\(k_1\)
\(k_2\)
\(k_5\)
\(k_{4}\)
\(k_{3}\)
\(x_0\)
\(x_1\)
\(x_2\)
\(x_3\)
\(x_4\)
\(x_5\)
\(u_0\)
\(u_1\)
\(u_3\)
\(u_4\)
\(u_5\)
Control óptimo de un sistema dinámico
\(x_{k+1}\): sistema dinámico de tiempo discreto
\(f_k\): función de actualización del sistema de tiempo \(k\) al tiempo \(k+1\)
\(g_{k}\): costo de transición al tiempo \(k\)
\(N\): horizonte finito
\(g_{N}\): costo de transición terminal
Formulación determinista de horizonte finito
Donde:

\(x_k\)
\(x_{k+1}\)
\(x_N\)
\(x_0\)
\(x_{k+1}=f_k(x_k, u_k)\)
Costo \(g_k(x_k, u_k)\)
Costo final
\(g_N(x_N)\)
Tiempo \(k\)
Futuro
Control \(u_k\)
Programación Dinámica (PD)
\(S\)
\(b\)
\(a\)
Secuencia de costos del control
\(\{J(a+1),J(a+2),\dots,J(b-1)\}\)
\(J(a+2)\)
\(J(a+1)\)
\(J(a+3)\)
\(J(b-1)\)
\(J(b-2)\)
\(J(b-3)\)
\(u_{b-1}\)
\(u_{b-2}\)
\(u_{b-3}\)
\(u_{b-4}\)
\(u_{a+2}\)
\(u_{a+1}\)
\(u_{a}\)
\(u_{a+3}\)
Secuencia de control
\(\{a:u_{a+1},\dots,u_{b-2}\}\)
Teorema: principio de optimalidad \(^*\)
(1)
Secuencia de estados óptimos
\(\{x^*_0, \dots, x^*_{k}, \dots, x^*_{N}\}\) desde \(x^*_0\)
Subproblema \(g(x^*_k,u^*_k)\)
\(x^*_{k}\)
\(k\)
\(x_N\)
\(N\)
\(u^*_k\)
\(\{u^*_0,\dots,\)\(u^*_k\)\(\}\)
\(x^*_{0}\)

\(u^*_0\)
Secuencia de control óptimo
\(J^*(x^*_k)=g(x^*_k,u^*_k)+\sum_{m=k+1}^{N-1}g_m(x_m,u_m)+g_N(x_N)\)
Costo final
\(g_N(x_N)\)
De manera general:
\(0\)
Secuencia de control óptimo
\(\{u^*_0, \dots, u^*_{k}, \dots, u^*_{N-1}\}\) desde \(x^*_0\)
Secuencia de control
\(\{u_0, \dots, u_{N-1}\}\)
Secuencia de estados
\(\{x_0, \dots, x_N\}\)
(2)
(3)
Costo óptimo
Soluciones exactas vía PD (ecuaciones de Bellman)
\(x_k\)
\(x_{k+1}\)
\(x_N\)
\(x_0\)
\(x_{k+1}=f_k(x_k, u_k)\)
Costo \(g_k(x_k, u_k)\)
Tiempo \(k\)
Futuro
$$J(x_0;u_0,\dots,u_{N-1})=g_N(x_N)+\sum^{N-1}_{k=0}g_k(x_k,u_k)$$
$$J^*(x_0)=\min_{\substack{u_k \in U_k(x_k) \\ k=0,\dots,N-1}}J(x_0;u_0,\dots,u_{N-1})=\min_{u_k \in U_k(x_k)}[g_N(x_N)+\sum^{N-1}_{k=0}g_k(x_k,u_k)]$$
Costo final
\(g_N(x_N)\)
\(u_{0}\)
\(u_{N-1}\)
\(u_{k}\)
Soluciones exactas vía DP para problemas de control óptimo de horizonte finito
Secuencia de control óptimo o política \(\pi^*\)
| Determinista | Estocástico |
|---|---|
| Exacto | Esperanza |
\(\{u_0,\dots,u_{N-1}\}\)
\(\{\mu_0,\dots,\mu_{N-1}\}\)
Cálculo de la función de costo óptimo \(J^*_k\) y la política óptima \(\pi^*_k\)
$$J^*_k=\min_{u_k \in U_k(x_k)}E[g_k(x_k,u_k,w_k)+J^*_{k+1}(x_k,u_k,w_k)]$$
$$\pi^*_k \in \arg \min_{u_k \in U_k(x_k)}E[g_k(x_k,u_k,w_k)+J^*_{k+1}(x_k,u_k,w_k)]$$
Secuencia de funciones de costo
\(\{J^*_N(x_N), J^*_{N-1}(x_{N-1}) \dots, J^*_{0}(x_0)\}\)
(5)
(4)
(2001) Teorema de Aproximación Universal
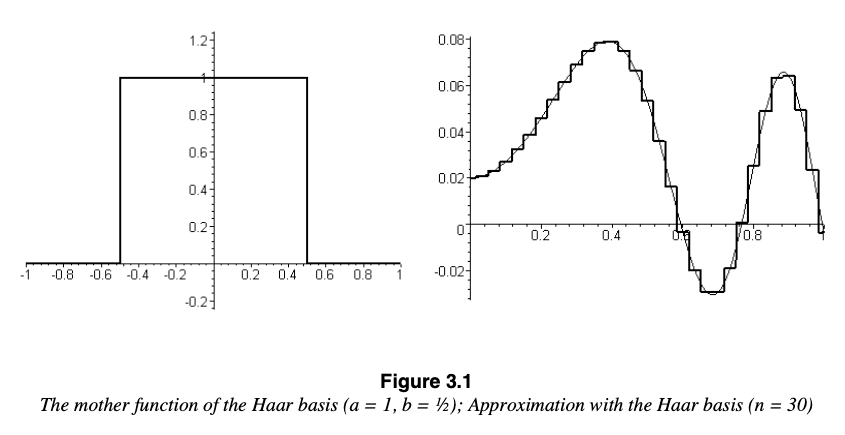
3) Aproximación con la función de activación Haar
(\(a=1, b=1/2, n=30\))
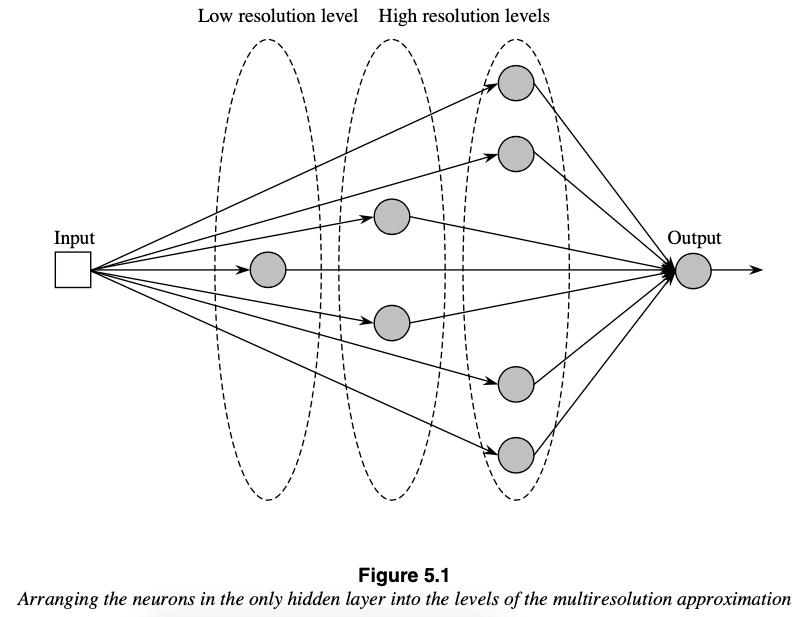
4) Aproximación multi-resolución (deep learning)
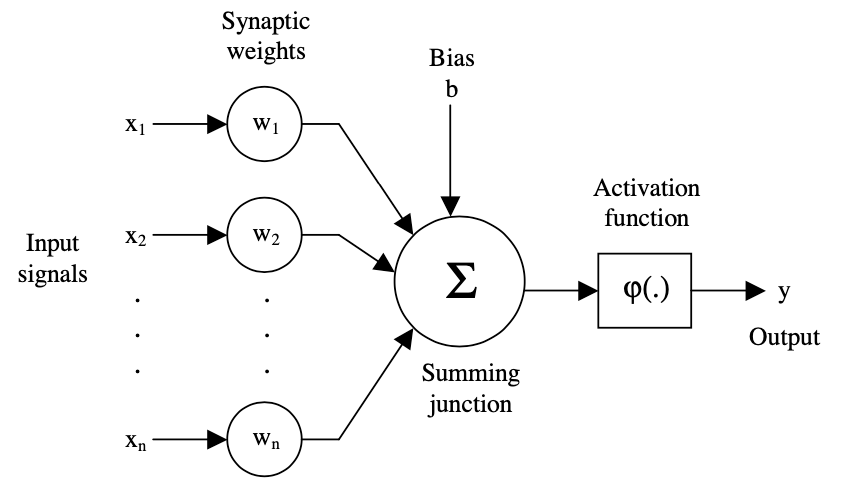
2) Modelo de una neurona no lineal
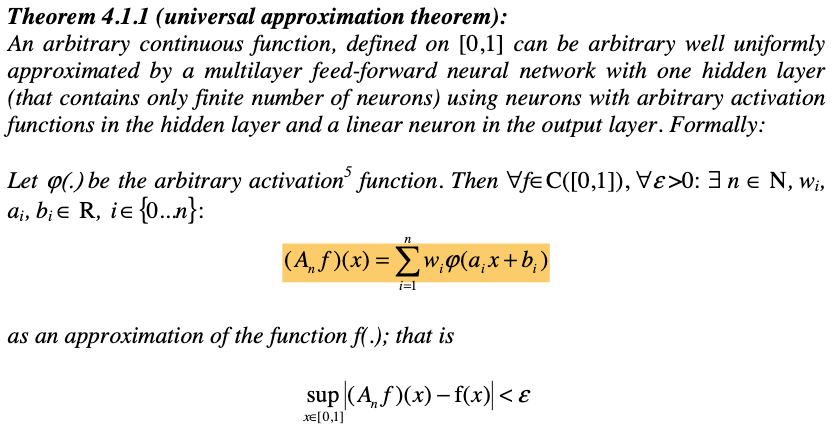
1) Teorema de aproximación universal
Aproximación en el espacio de estados
Donde
\(x_{m,k}\): muestras del estado \(x_k\)
\(r_k\): peso en \(k\)
\(r'_k\): peso "afinado" en \(k\)
\(\phi_k\): vector de características en la forma \(\{\phi_{1,k}(x_k), \dots, \phi_{m,k}(x_k)\}\) asociados a \(x_k\) en el tiempo \(k\)
\(\hat{J}_k\): costo aproximado
Usar el costo aproximado \(\hat{J}_{k}\) en lugar del costo óptimo \(J^*_{k}\)
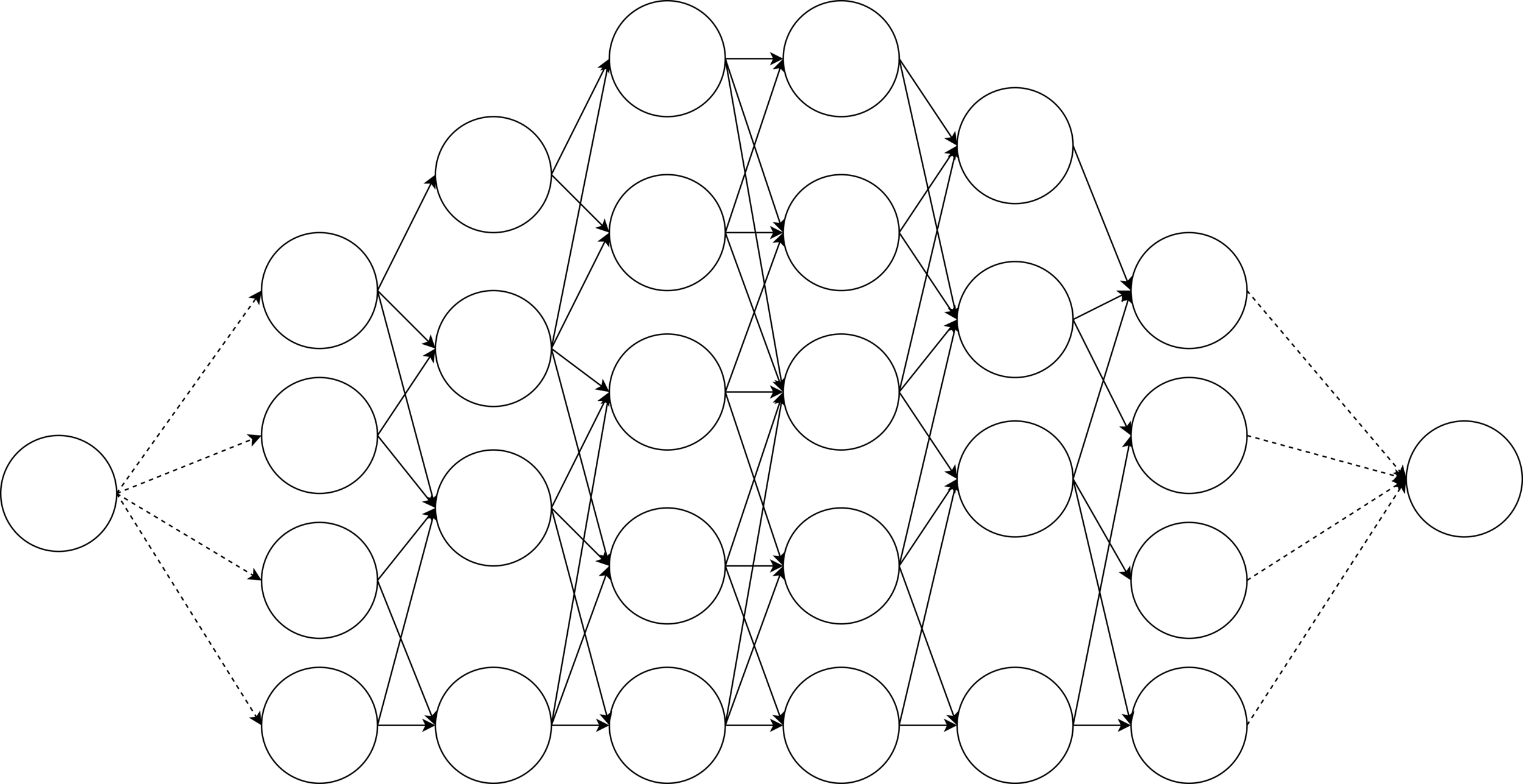
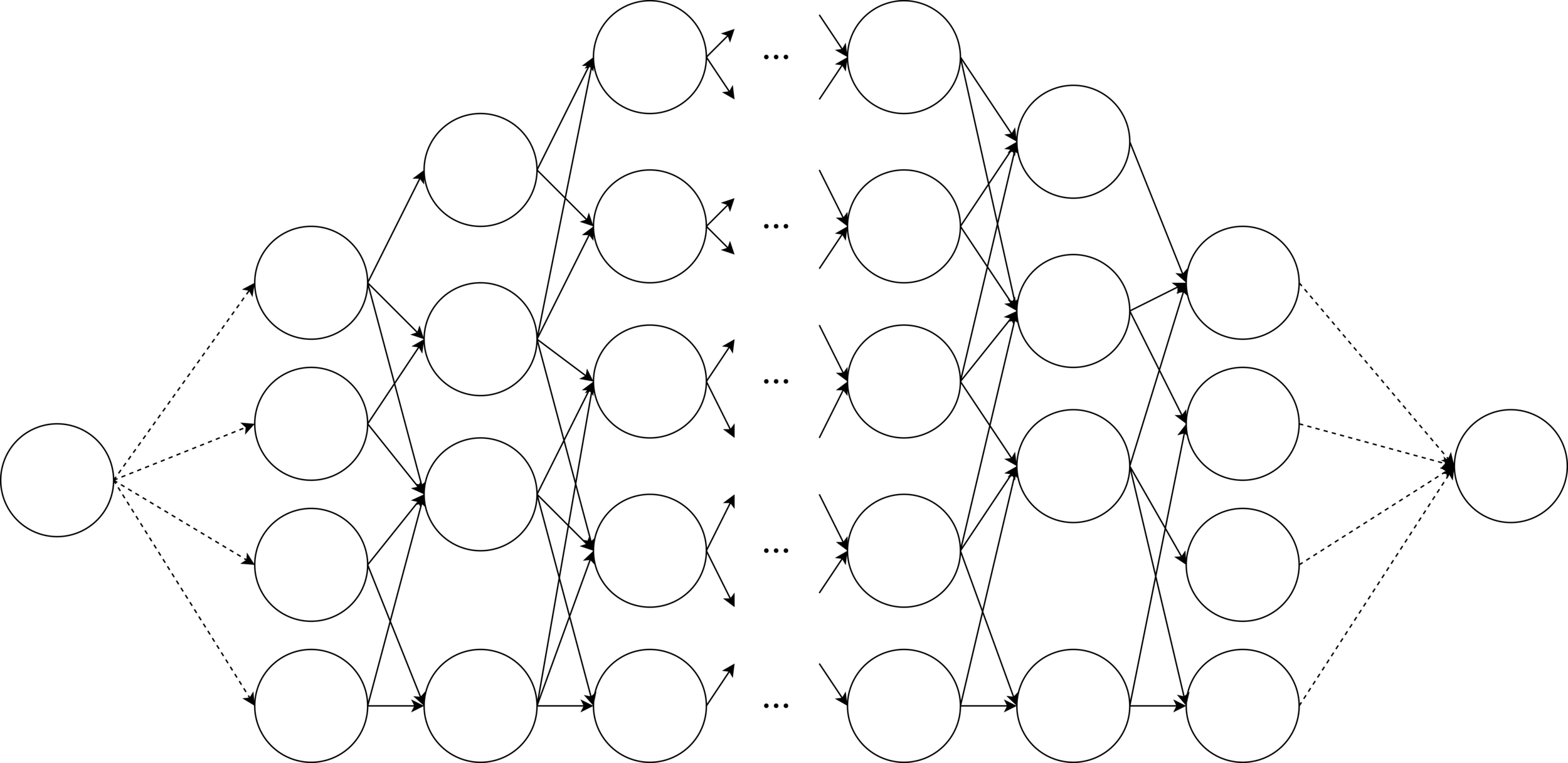
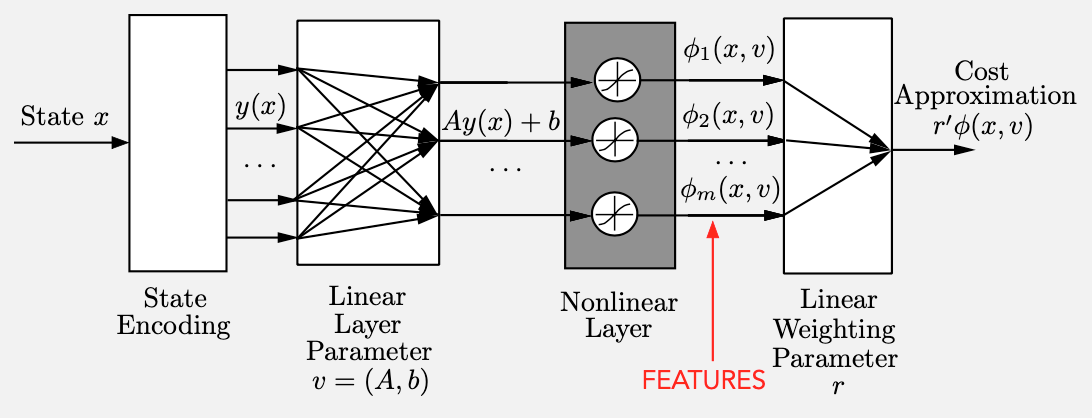
Arquitectura de aproximación basada en características
\(\hat{J}_{k}(\phi_{k}(x_{k}),r_k)\)

Vector de
características
\(\phi_k(x_k)\)
Extracción de características
Selección de
características
Estado
\(x_k=x_{m,k}\)
Costo aproximado
\(r'_{k} \phi_k (x_k)\)
(7)
Arquitectura de aproximación
1) Estructura del Perceptron, arquitectura de aproximación bioinspirada
Arquitecturas basadas en características lineales y no lineales
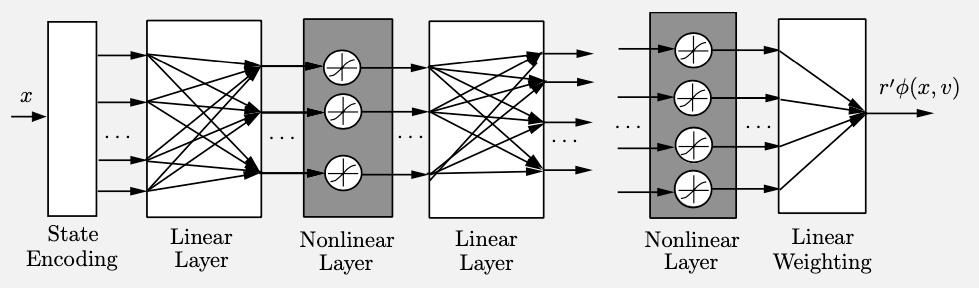
4) Red neuronal profunda con múltiples capas
3) Función de costo
[2]
[2]
\(x_1\)
\(x_2\)
\(x_3\)
2) Modelo de espacio vectorial
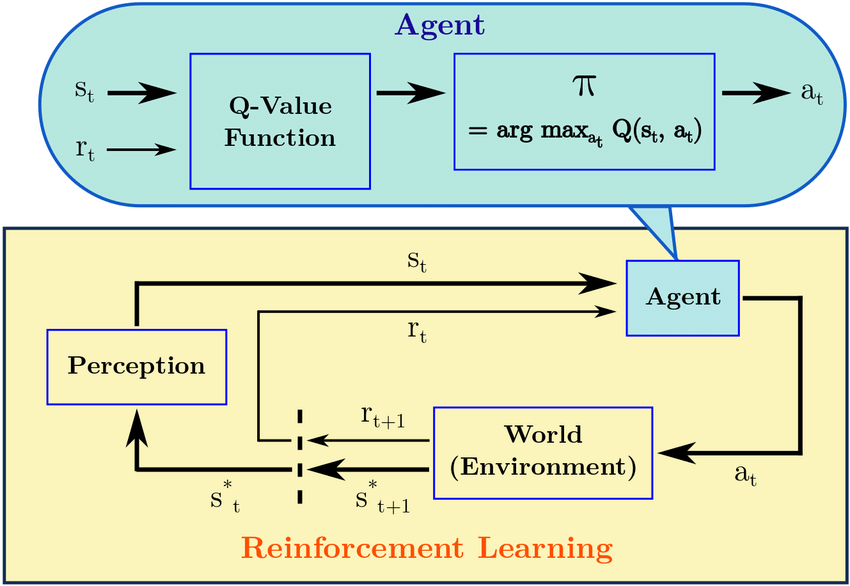
Aprendizaje reforzado
Aprendizaje reforzado
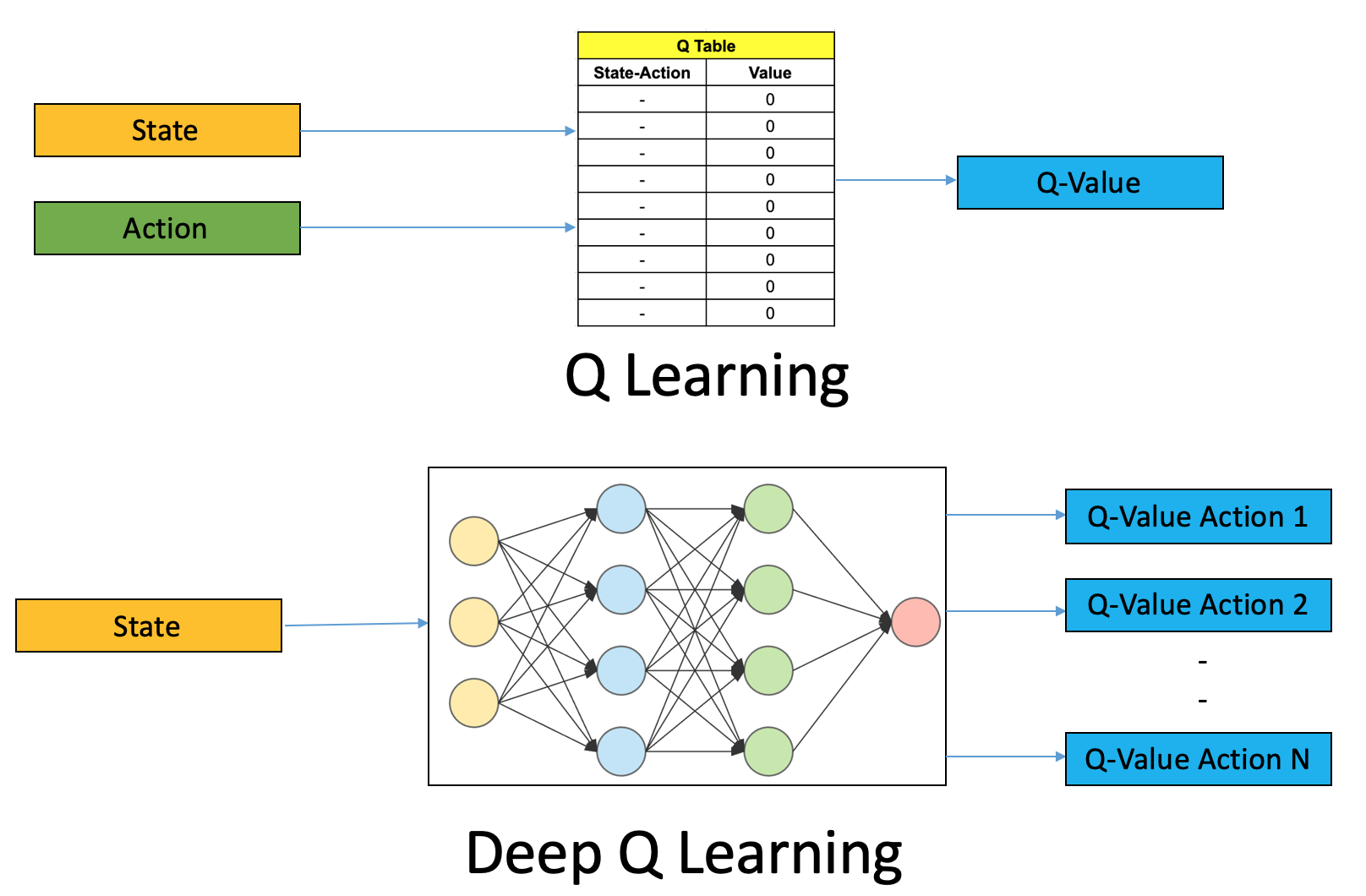
Algoritmo \(Q-\text{learning}\)
recompensa inmediata
factor de descuento
la mejor recompensa futura sobre todas las acciones
\(Q(s,a) = \lbrace Q(s,a;\theta) - \lbrack r(s,a) + \gamma \max\limits_{a} Q(s,'a) \rbrack \rbrace ^{2} \)
Aprendizaje reforzado
Algoritmo \(DQN-\text{learning}\)
\(Q(s,a) = \lbrace Q(s,a;\theta) - \lbrack r(s,a) + \gamma \max\limits_{a} Q(s,'a) \rbrack \rbrace ^{2} \)
\(MSE=\frac{1}{n} \sum_{1}^{n} (y_i-\hat{y_i})^{2} \)
función de aproximación \(Q-\text{target}\)
pesos (parámetros)
En un entorno desconocido
Un agente
Toma acciones basado en su propia política
Entonces su estado se actualiza
Y la evaluación de esa acción se da como una recompensa
Un laberinto
Un robot
Caminar
Moverse hacia delante

Puntuación
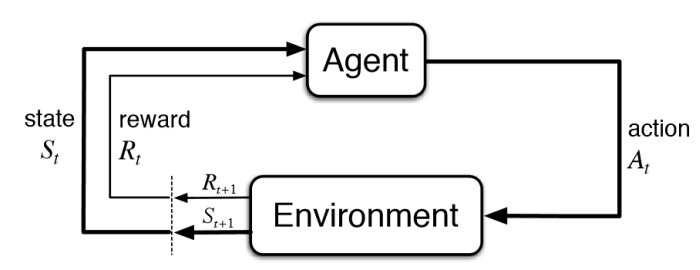
Markov Decission Process (MDP)
Entorno
Agente
Recompensa
Estado
Acción
Estados
2
3
4
5
6
7
8
9
10
11
13
14
15
16
17
12
Acciones
Transiciones
Recompensas
Recompensas inmediatas

Objetivo del AR
Que el agente encuentre su propia política para recibir la máxima cantidad de recompensas
Ganancia
Política
Trayectoria
Ejemplo
Problema: encontrar la trayectoria óptima que maximice la ganancia
Solución: dividir el problema en subproblemas (programación dinámica)
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
2
3
4
5
7
8
9
10
11
13
14
15
16
17
12
6
2 problemas
(encontrar el valor del estado 2 y 5)
4 sub-problemas
(encontrar el valor del estado 2, 5, 6 y 1)
Factor de descuento
2
3
4
5
7
8
9
10
11
13
15
16
17
12
6
10
11
14
15
\(0.9^1\)
\(0.9^0\)
\(0.9^2\)
\(0.9^1\)
\(0.9\)
\(1\)
\(0.81\)
\(0.9\)
\(0.9^7\)
\(0.9^6\)
\(0.9^7\)
\(0.9^7\)
\(0.9^5\)
\(0.9^6\)
\(0.9^4\)
\(0.9^1\)
\(0.9^2\)
\(0.9^4\)
\(0.9^1\)
\(0.9^2\)
\(0.9^3\)
\(0.9^3\)
\(0.9^6\)
\(0.9^0\)
\(0.9^8\)
\(0.48\)
\(0.53\)
\(0.48\)
\(0.48\)
\(0.6\)
\(0.53\)
\(0.66\)
\(0.9\)
\(0.81\)
\(0.66\)
\(0.9\)
\(0.81\)
\(0.73\)
\(0.73\)
\(0.53\)
Referencias

Sugiyama, M.: Statistical Reinforcement Learning: Modern Machine Learning Approaches. ISBN 9781439856895, 1st Edition, Chapman and Hall/CRC, 2015
Barto A. y Sutton R.: Reinforcement Learning: An Introduction. ISBN 9780262039246, 2nd ed, Bradford Book, 2018
Gatti C.: Design of Experiments for Reinforcement Learning. ISBN 9783319121970, Springer Theses, 2015
¡Muchas gracias!
@jacoboggleon
Reinforcement Learning (to-update-version)
By jacoboggleon



