Aproximación Eficiente de la Cápsula No-Convexa para Reconstrucción de Superficies
Tesista: Julián Bayardo Spadafora <julian@bayardo.info>
Director: Francisco Gómez Fernandez <fgomezf@gmail.com>

Reconstrucción de Superficies 3D
Text


Para qué?
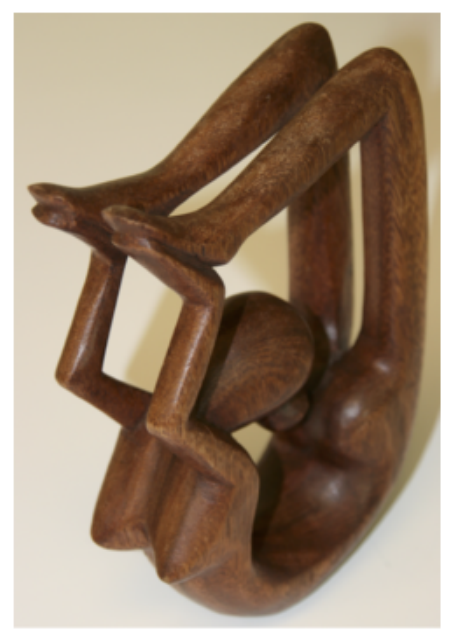
- Restauración y preservación de objetos de interés cultural
- Prototipado rápido
- Objeto => modelo CAD
- Medicina
- Diseño y manufactura de prótesis
- Planeo de cirugias
- Animación
- Aplicaciones recientes en AR para gamification
- Ciencia
- Monitoreo de sitios de excavación arqueológica
...
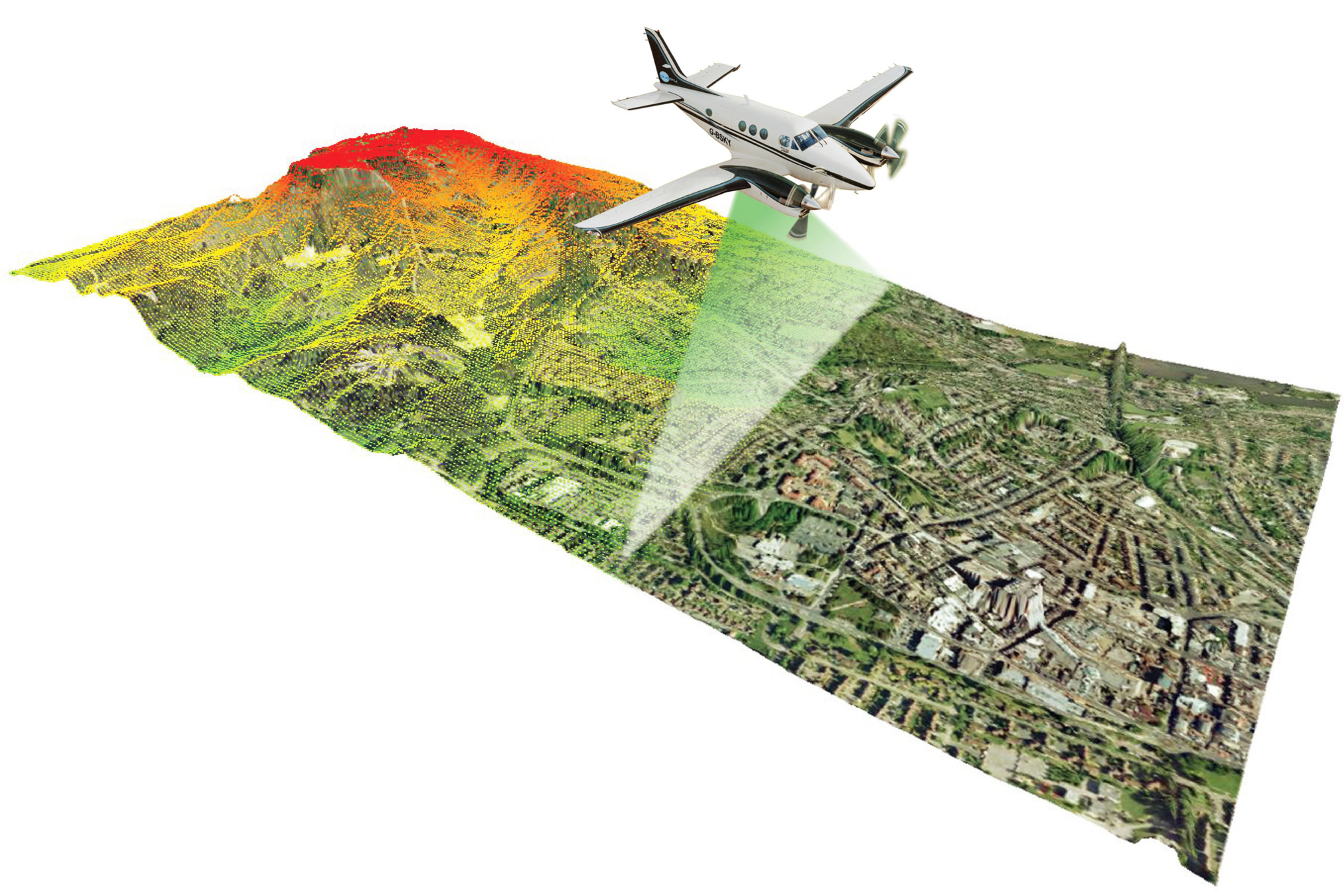
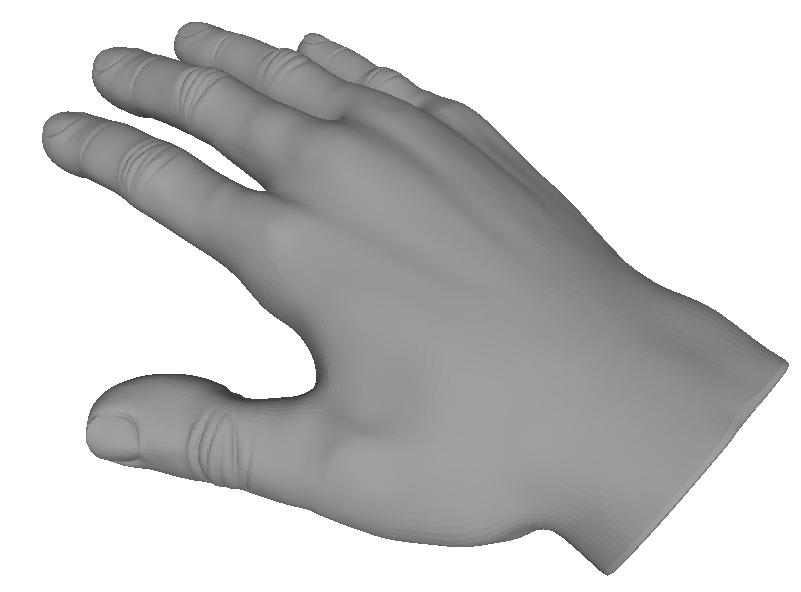
Adquisición
Reconstrucción
Visualización
Adquisición
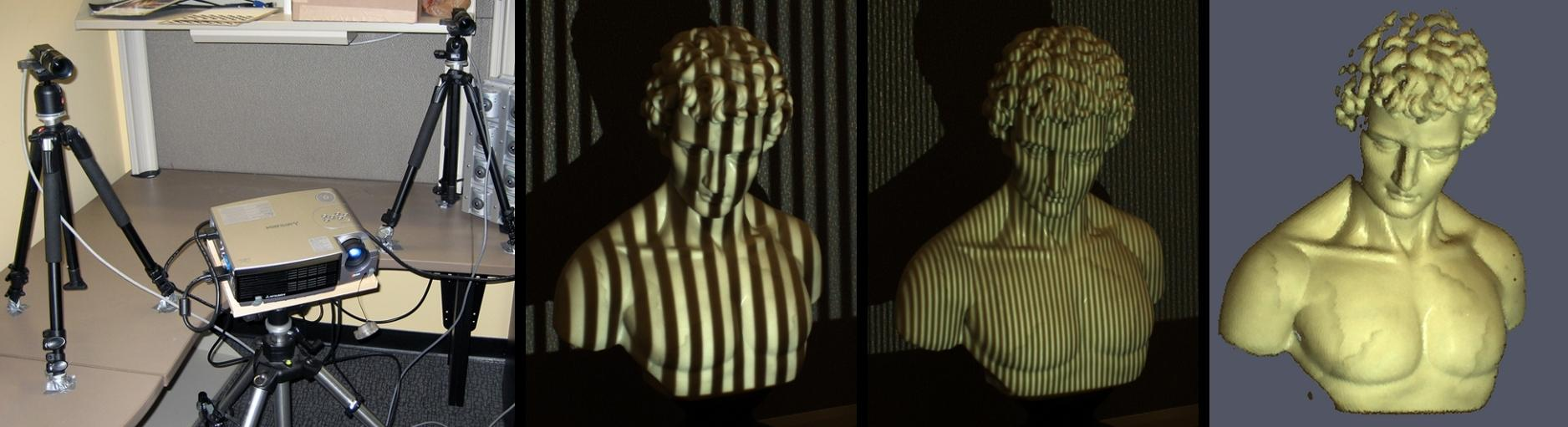
Equipos
Proyección y Fotos con
Luz Estructurada
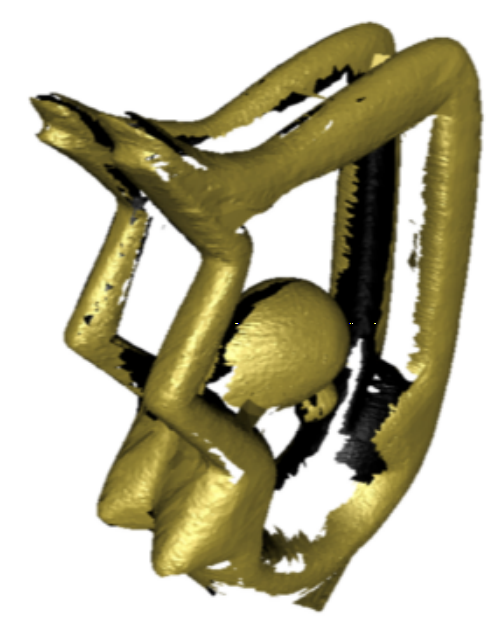
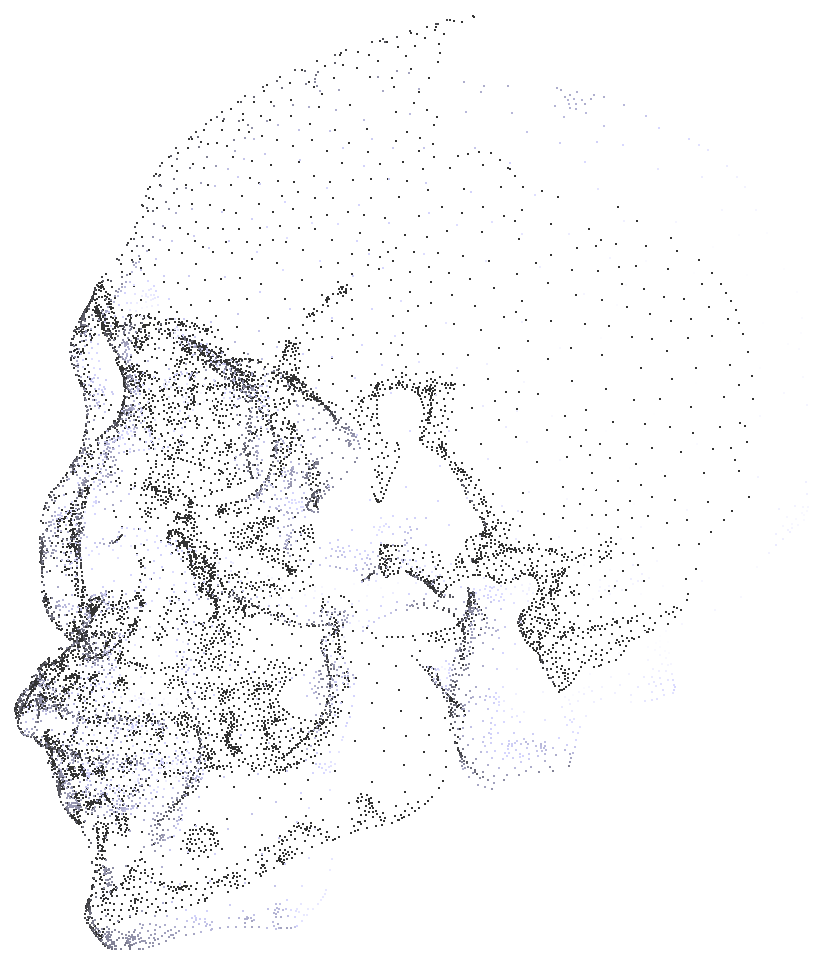
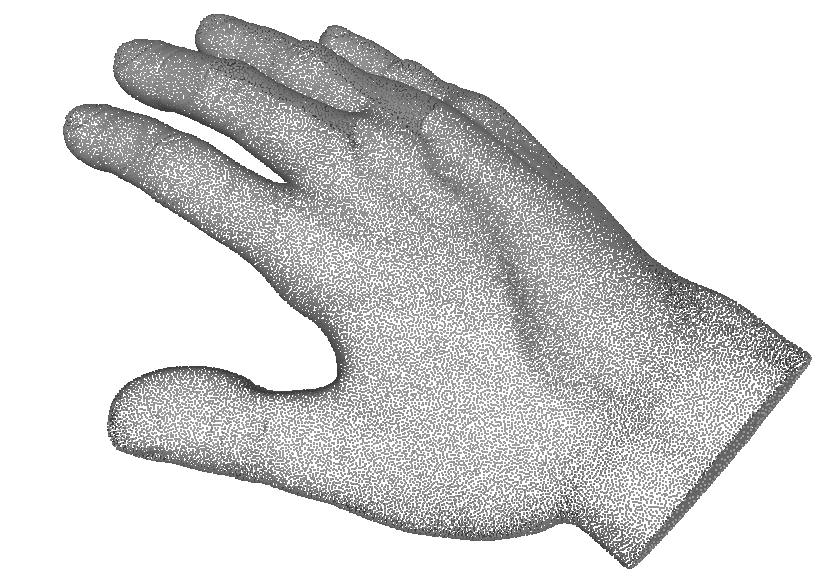
Nube de Puntos
Camaras
Proyector


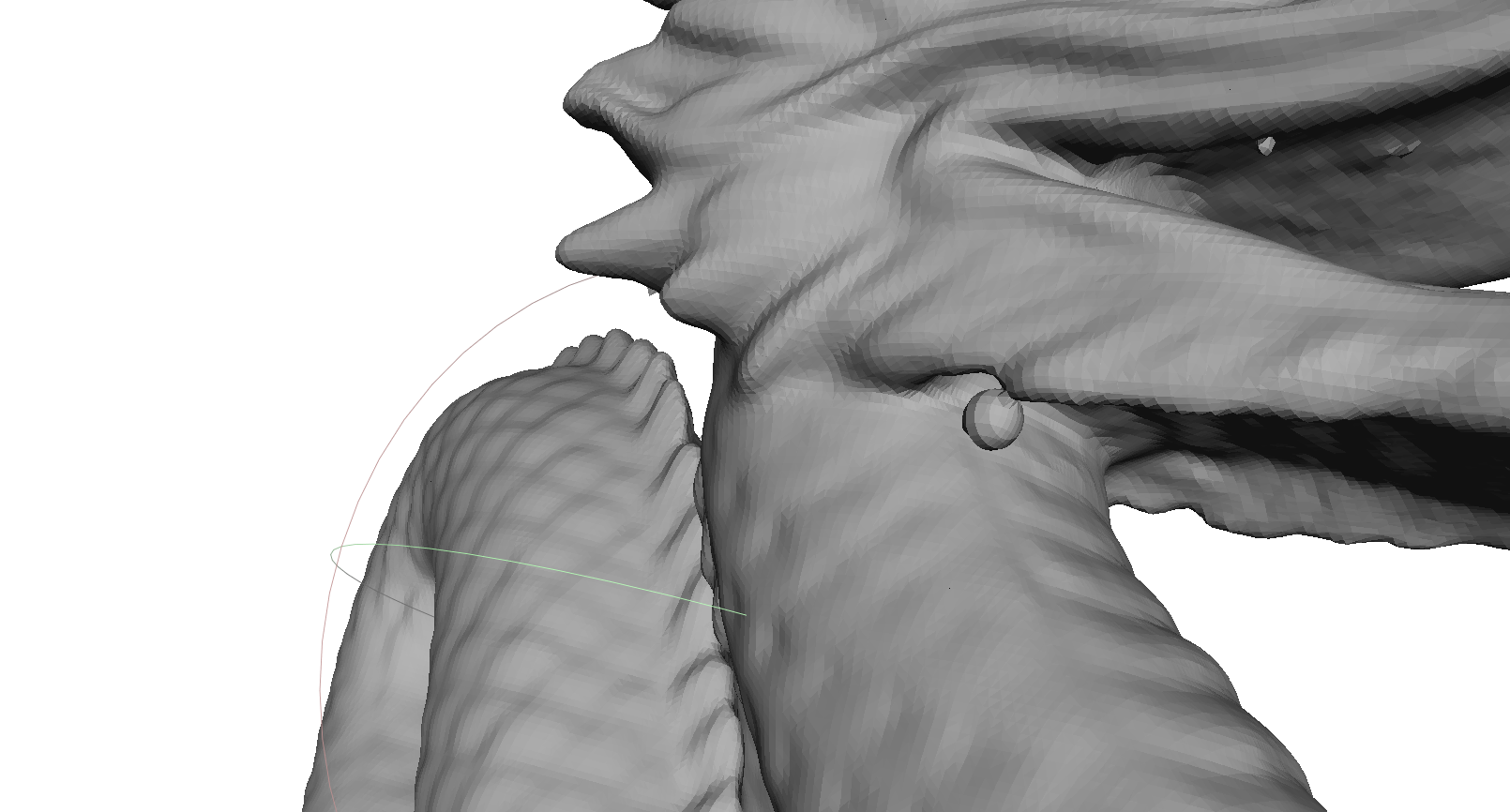
Registrado
Dos nubes de puntos, una mostrada en rojo y otra en verde
+Equipos, +Calidad
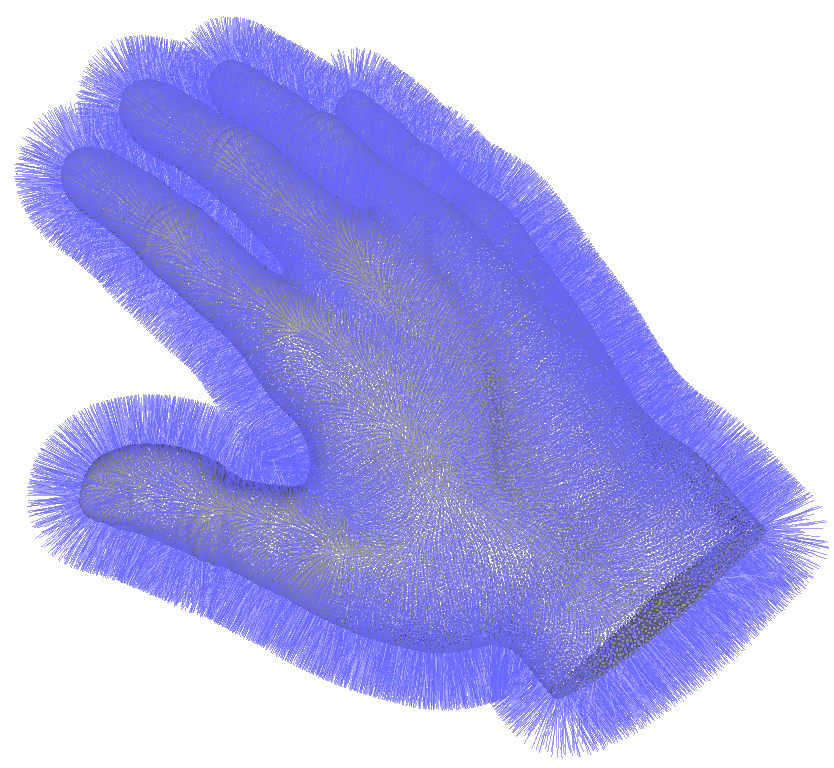
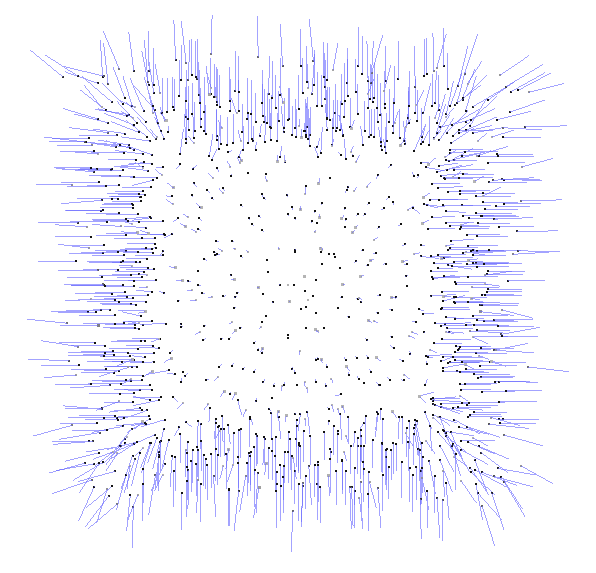
Nubes de Puntos Orientadas
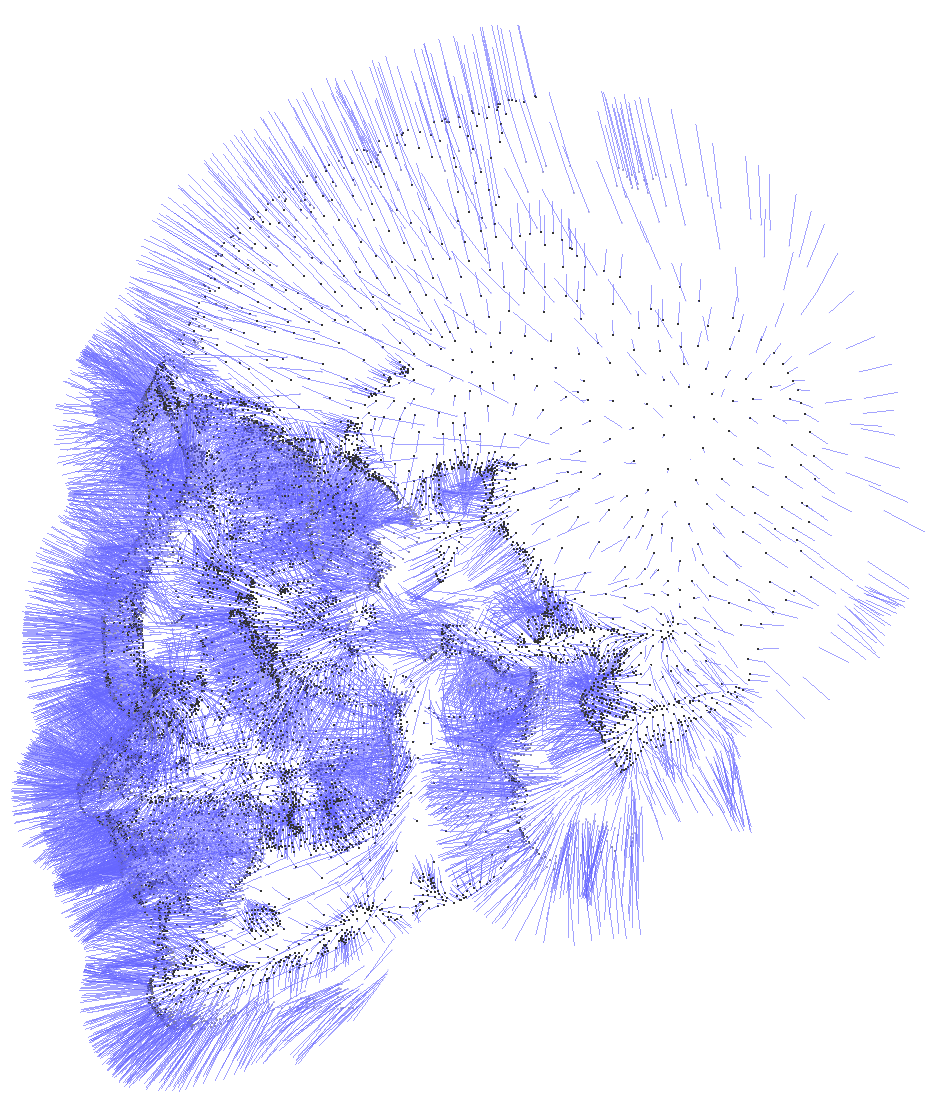
"Hacia dónde es el adentro/afuera"
\mathcal{P} = \{ \mathbf{p_1}, \ldots, \mathbf{p_N} \}
\mathcal{N} = \{ \mathbf{n_1}, \ldots, \mathbf{n_N} \}, ||\mathbf{n_i}||_2 = 1
Reconstrucción

Por qué?
- Las representaciones matemáticas de superficies tienen información importante sobre ellas:
- Hacia a dónde es el adentro y el afuera
- Si estamos en una zona plana o curva
- Etcétera
- Más versatilidad
- Múltiples aplicaciones
- Hay muchas formas de representar superficies, cada una con ciertas ventajas para distintos usos.
Representación de Superficies
- Paramétricas
- \( f : \Omega \to \mathcal{S}, \Omega \subset \mathbb{R}^2 \)
- \( f(\Omega) = \mathcal{S} \subset \mathbb{R}^3 \)
-
Ejemplo: \( f_r(t) = (r \cos(t), r \sin(t)), 0 < t \leq 2 \pi \)
- "Coordenadas Polares"
- Implícitas
- \( f : \mathbb{R}^3 \to \mathbb{R} \)
- \( S = \{ \mathbf{x} \in \mathbb{R^3} | f(\mathbf{x}) = 0\} \)
- Ejemplo: \( f(\mathbf{x}) = || \mathbf{x} ||_2 - 1 \)
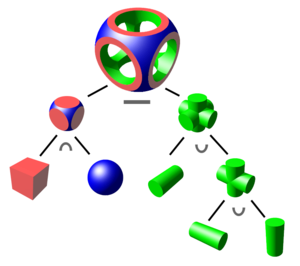
Funciones de Distancia con Signo (SDF)
- \( f(\mathbf{x}) < 0 \iff \mathbf{x} \in \mathcal{S}^c \)
- \( f(\mathbf{x}) = 0 \iff \mathbf{x} \in \partial \mathcal{S} \)
- \( f(\mathbf{x}) > 0 \iff \mathbf{x} \in \mathcal{S} \)

- \( \max\{ f(\mathbf{x}), g(\mathbf{x}) \} \equiv \mathcal{S} \cup \mathcal{S}' \)
- \( \min\{ f(\mathbf{x}), g(\mathbf{x}) \} \equiv \mathcal{S} \cap \mathcal{S}' \)
- \( -f(\mathbf{x}) \equiv \mathcal{S} ^c \)
...
f(\mathbf{x}) = || \mathbf{x} ||_2 - r

Muchísimo poder!
- Se pueden armar árboles que representan figuras k-dimensionales
- Llevado al extremo:

Ejemplos típicos:
- CAD
- Animaciones rápidas
Visualización
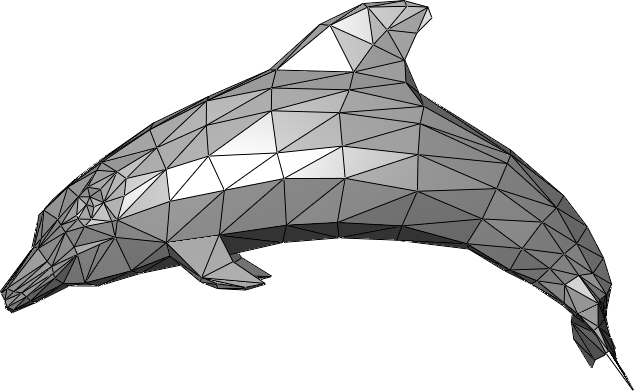
En general...
- Las computadoras usan mallas poligonales para representar superficies, en particular triangulares
- Por qué?
- Más rápidas para muchas aplicaciones prácticas
- 30 años de tecnología dedicada
- Sin embargo
- Menos información a priori
- Menos flexible
- Es adicional a la reconstrucción
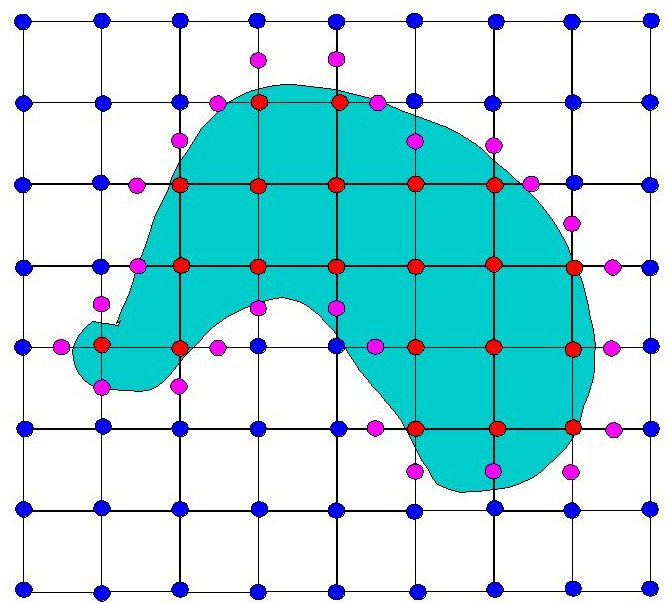
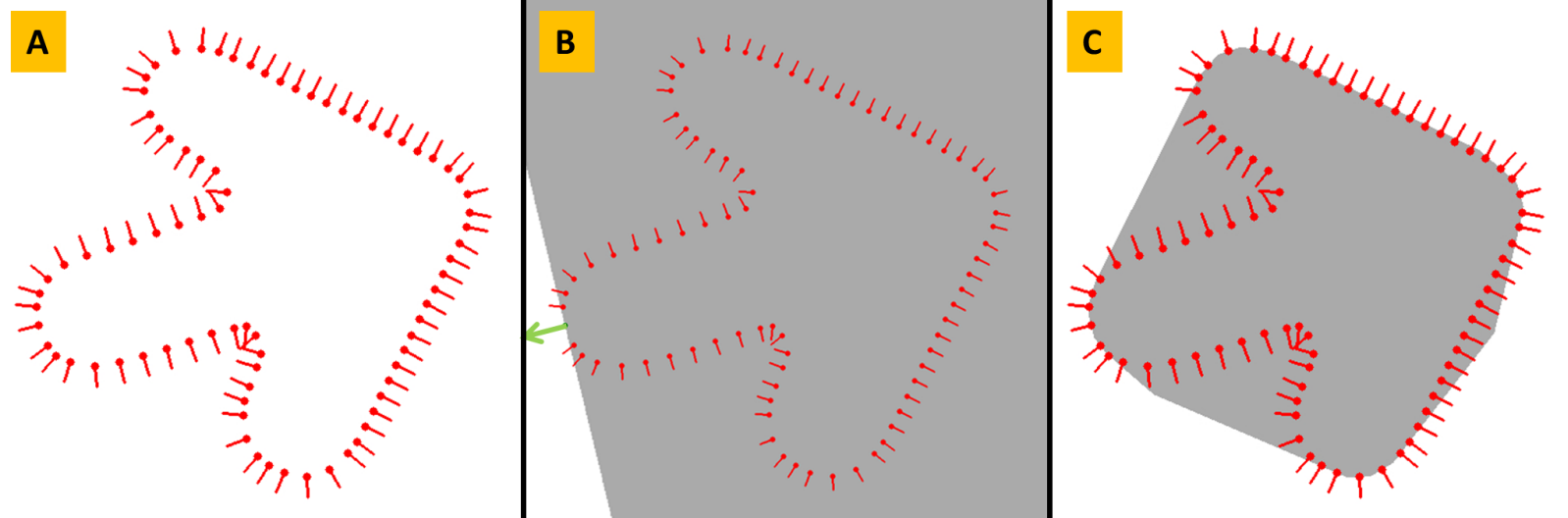
Isoextracción
- Necesitamos pasar de una SDF \( f : \mathbb{R}^3 \to \mathbb{R} \) a una malla poligonal
- Se usa Marching Squares / Cubes
- Entrada: una grilla de evaluaciones de \( f \) en \( d \) dimensiones
- Salida:
- En 2D, lineas
- En 3D, triangulos
- Lineal en el tamaño de la grilla
- Depende de la resolución
Aportes
- Demostraciones de varias propiedades de la Non-Convex Hull (NCH).
- Explicación de los vínculos entre la NCH y la Medial Axis Transform (MAT).
- Establecimos nuevos vínculos con el Power Diagram y el Multiplicatively Weighted Voronoi Diagram.
- Arreglamos problemas de Shrinking Ball (SB).
Aportes
- Desarrollamos Shrinking Planes (SP), para aproximar la NCH
- Mejora de complejidad \( \Theta(N^2) \) a \( \mathcal{O}(N \log N) \).
- Proponemos una forma de comparar entre NCHs
- Experimentamos sobre los algoritmos propuestos y aplicamos la comparación anterior
- Mucho más rápidos
- Aproximan muy bien
- Experimentamos con la NCH para reconstrucción de superficies y comparamos con el estado del arte
- Resultados muy prometedores, con lugar para mejora
Cápsula No-Convexa
o NCH (Non-Convex Hull)
Convexidad
Conjunto Concavo
Conjunto Convexo
Convexo: todo par de puntos en el conjunto se une por una recta
Concavo: todo conjunto no convexo!
Cápsula Convexa
Convex Hull

El conjunto convexo más chico que contiene a un conjunto de puntos
Cápsula Convexa Orientada
Oriented Convex Hull
H_i = \{\mathbf{x} | f_i(\mathbf{x}) \leq 0\}
f_i(\mathbf{x}) = \langle \mathbf{n_i},
\mathbf{x} - \mathbf{p_i} \rangle
> 0
< 0
> 0
< 0
\bigcap H_i \\
\equiv
f(\mathbf{x}) = \max_{1 \leq i \leq N} f_i(\mathbf{x})
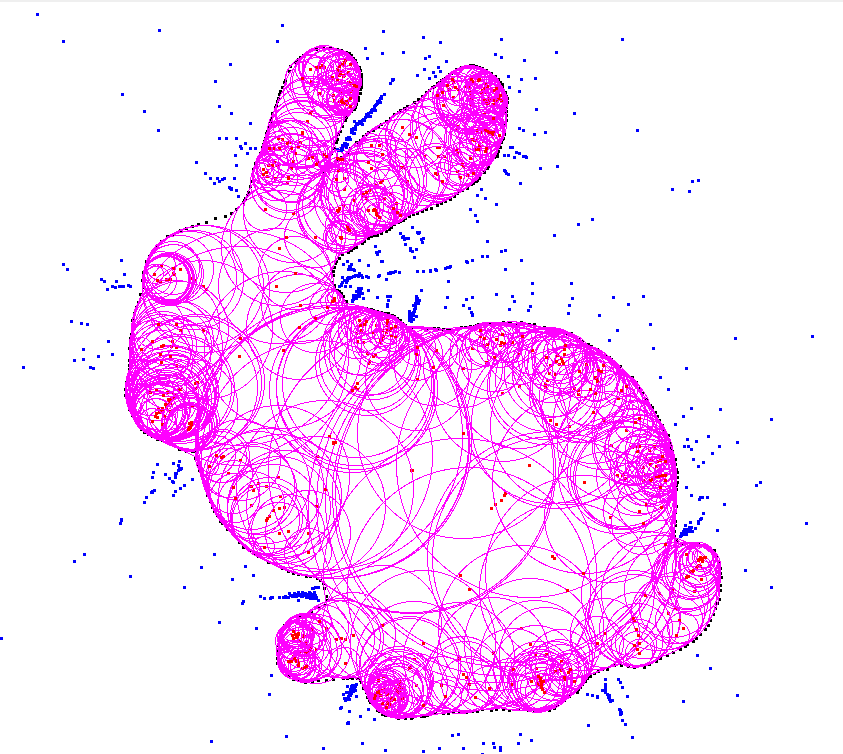
Cápsula No-Convexa
Non-Convex Hull
H_i = \{\mathbf{x} | f_i(\mathbf{x}) \leq 0\}
f_i(\mathbf{x}) = \langle \mathbf{n_i},
\mathbf{x} - \mathbf{p_i} \rangle - \rho_i || \mathbf{x} - \mathbf{p_i} ||^2
\bigcap H_i \\
\equiv
> 0
< 0
< 0
> 0
> 0
< 0
f(\mathbf{x}) = \max_{1 \leq i \leq N} f_i(\mathbf{x})
\(f(\mathbf{x})\) es una SDF
NCH SDF
f_i(\mathbf{x}) = \langle \mathbf{n_i},
\mathbf{x} - \mathbf{p_i} \rangle - \rho_i || \mathbf{x} - \mathbf{p_i} ||^2
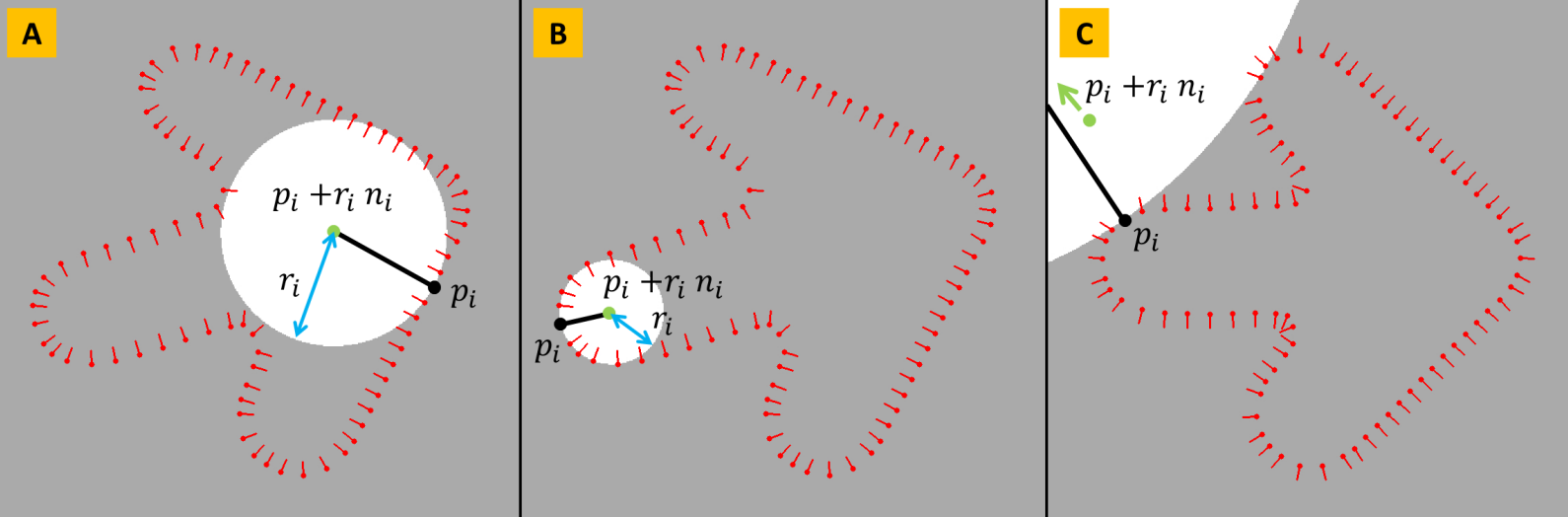
f_i(\mathbf{x}) = \frac{1}{2 r_i} \{ r_i^2 - || \mathbf{x} - (\mathbf{p_i} + r_i \mathbf{n_i}) ||^2 \}
\equiv
- Si \( \rho_i = 0 \), \( f_i(\mathbf{x}) \) es una SDF para un plano
- Si \( \rho_i > 0 \), \( f_i(\mathbf{x}) \) es una SDF para una esfera, centrada en \( \mathbf{p_i} + r_i \mathbf{n_i} \) y de radio \( r_i = \frac{1}{2 \rho_i}\)
Una sola elección: \( \rho_i \)
- Dijimos qué objeto matemático estamos usando.
- No cómo encontrarlo.
- 4 reglas
- \( f_i(\mathbf{p_i}) = 0\)
- \( \nabla f_i (\mathbf{p_i}) = \mathbf{n_i} \)
- \( f_i(\mathbf{p_j}) \leq 0 \) para todo otro punto
- \( \rho_i \geq 0 \) y además es maximal
- Si pedimos esas 4 propiedades, \( \rho_i \) queda univocamente determinado:
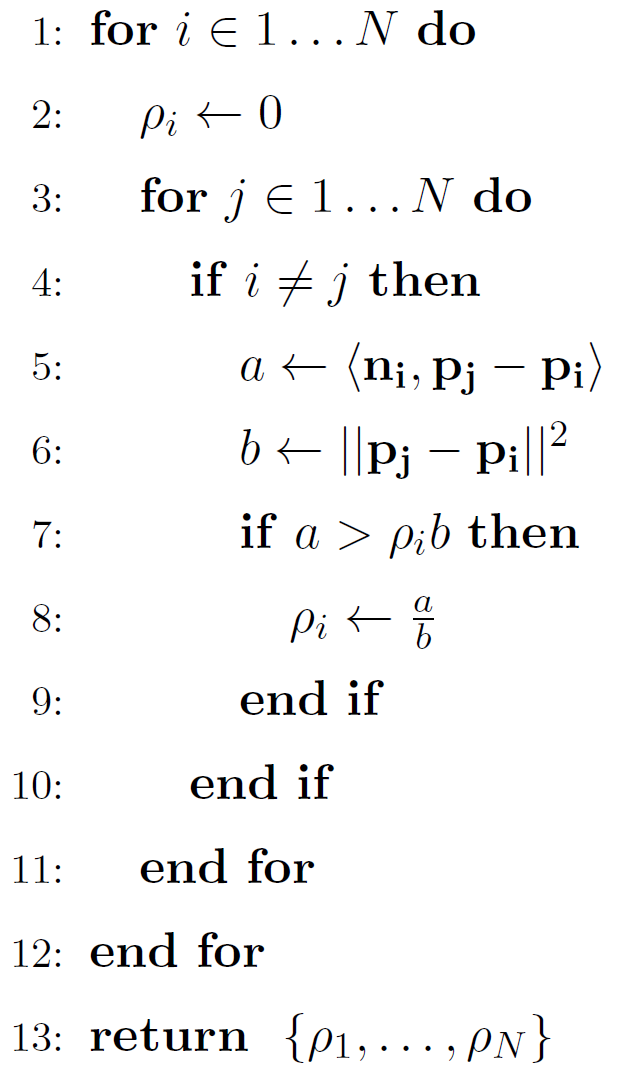
\( \rho_i = \max_{1 \leq j \leq N, j != i} \frac{\langle \mathbf{n_i}, \mathbf{p_j} - \mathbf{p_i} \rangle}{|| \mathbf{p_j} - \mathbf{p_i} ||^2} \)
En código...
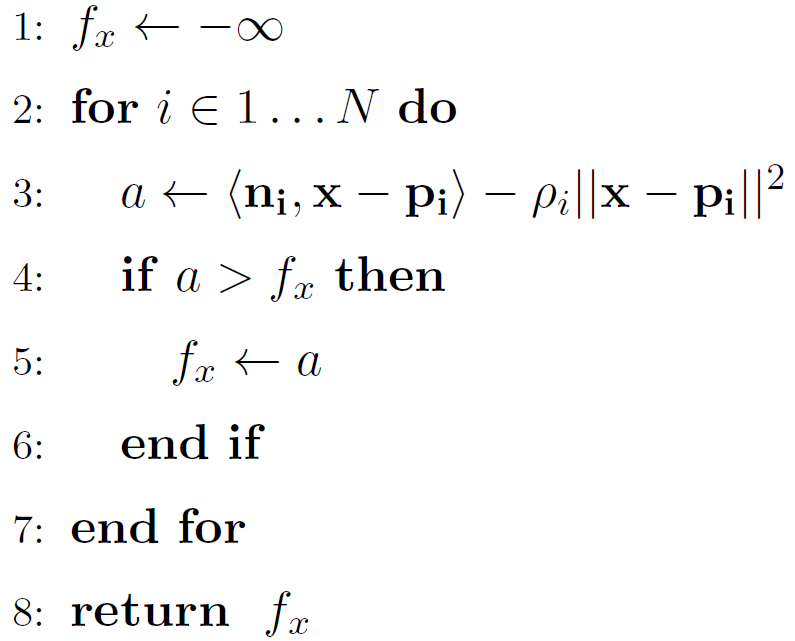
Estimar
SDF para \( \mathbf{x} \)
f_i(\mathbf{x}) = \langle \mathbf{n_i},
\mathbf{x} - \mathbf{p_i} \rangle - \rho_i || \mathbf{x} - \mathbf{p_i} ||^2
f(\mathbf{x}) = \max_{1 \leq i \leq N} f_i(\mathbf{x})
\rho_i = \max_{1 \leq j \leq N, j != i} \frac{\langle \mathbf{n_i}, \mathbf{p_j} - \mathbf{p_i} \rangle}{|| \mathbf{p_j} - \mathbf{p_i} ||^2}
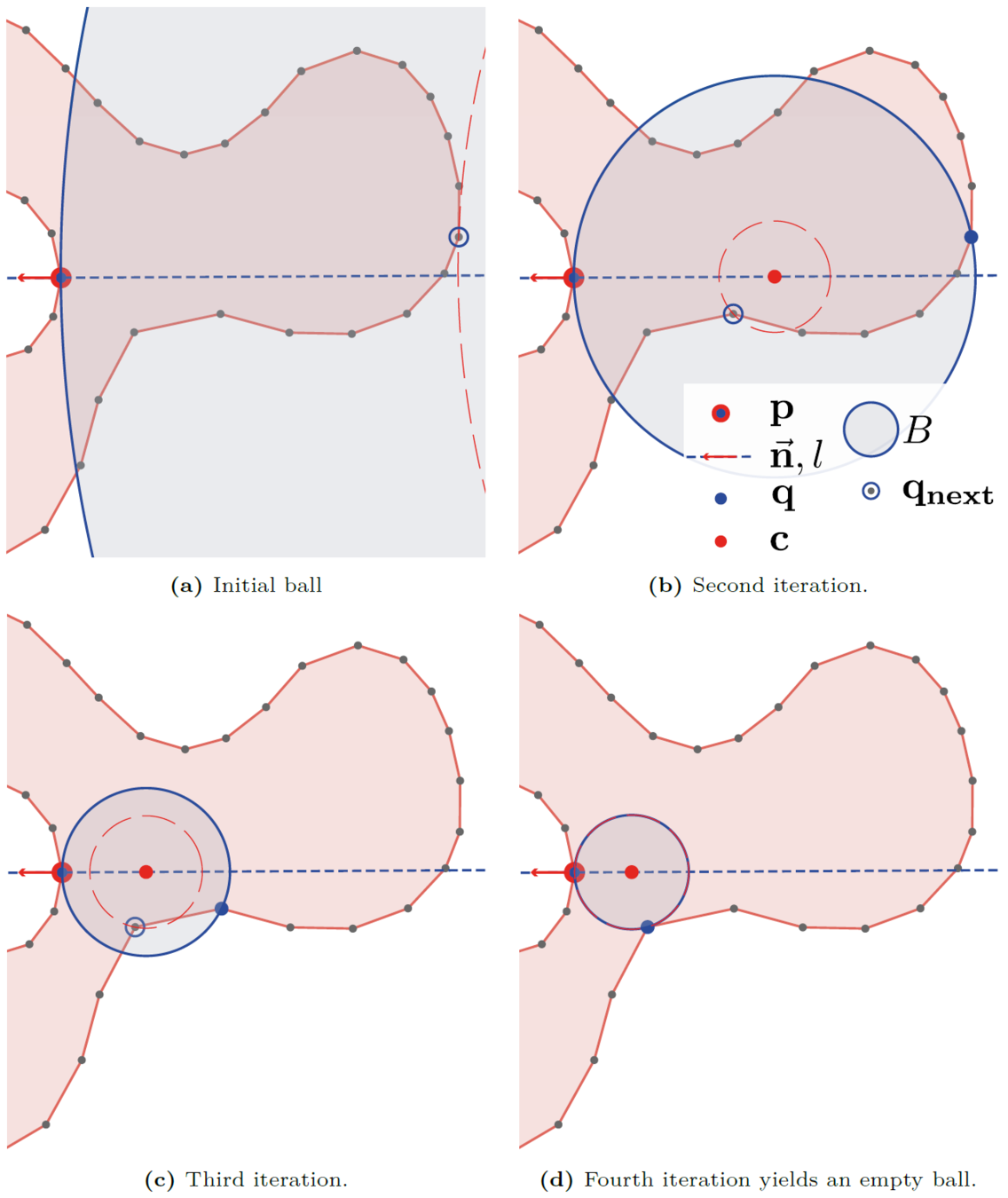
La intuición es...
- Poner un plano en el punto, apuntando según su normal
- Por cada punto distinto del actual:
- Si no está del lado de la normal:
- Saltearlo, ir al otro
- Reemplazar lo que haya por la esfera más grande que lo deje afuera o en el borde.
- Si no está del lado de la normal:
-
Ponemos un plano o esfera que:
- Deja a todos los puntos afuera o en el borde
- Toca al punto actual
- El "centro" está en la línea determinada por \( \mathbf{p_i} \) y \( \mathbf{n_i} \)
Naïve Non-Convex Hull
- Estimación de \( \rho_i \) como describimos
- Fácil de programar (son 20 lineas!)
- Trivialmente paralelizable
- \( \Theta(N^2) \), con \( N \) la cantidad de puntos (lento!)
- Con condiciones sobre los puntos, reconstrucción sin error
- Invariante a roto-traslación, y predecible al escalar un objeto (menos mal!)
Hacia adentro
"Inner NCH"
Hacia afuera
"Outer NCH"
Nube de Puntos
Symmetric NCH
- En la práctica las normales se estiman y se orientan automáticamente
- No queremos que la reconstrucción dependa de la orientación
- Entonces:
f(\mathbf{x}) = \frac{f^{+}(\mathbf{x}) - f^{-}(\mathbf{x})}{2}
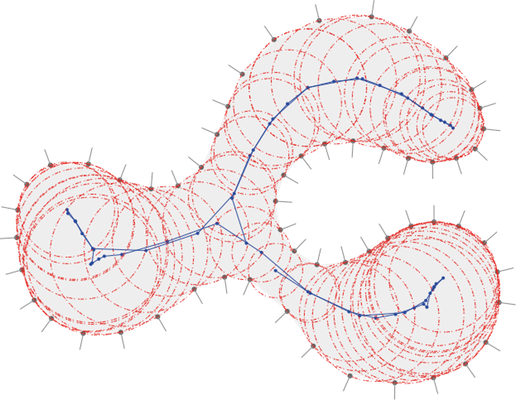
Shrinking Ball
para aproximación de la MAT
Medial Axis Transform
- Representación de una superficie como una unión de bolas k-dimensionales.
- Unir los centros es el "esqueleto" de la figura
- Cada bola es maximal (no puede agrandarse sin salir del objeto)
- Toca por lo menos dos puntos de la superficie
- ...
NCH = MAT
Cuando \( \rho_i > 0 \forall i\)
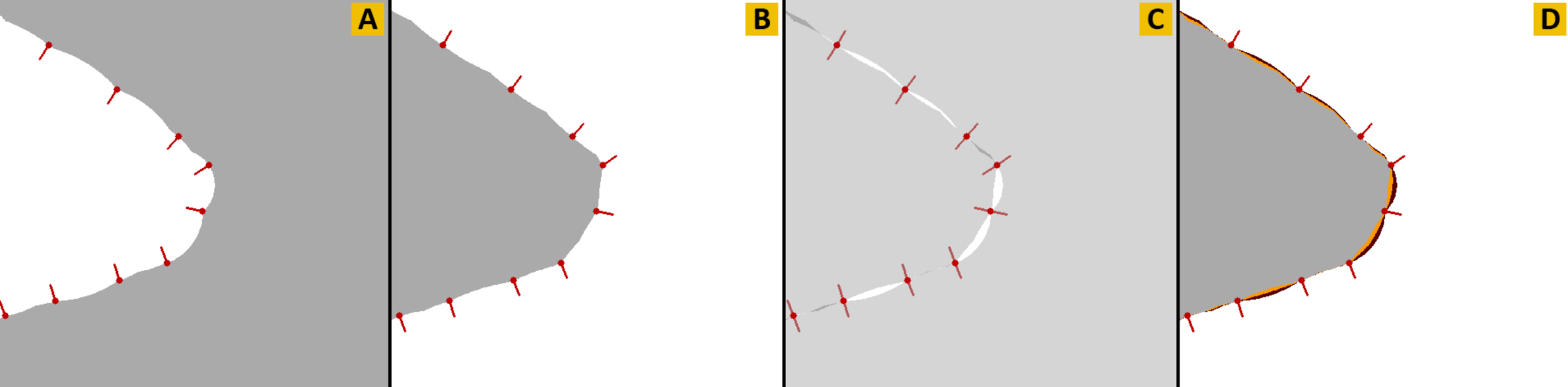
... Y hacia afuera...
- Podemos poner planos!
- Deja de ser equivalente, y produce reconstrucciones distintas
- Outer NCH es mucho mejor para aproximar bordes filosos
- La MAT necesita infinitas bolas!
En código...
Cómo encontrar al vecino: K-D Tree
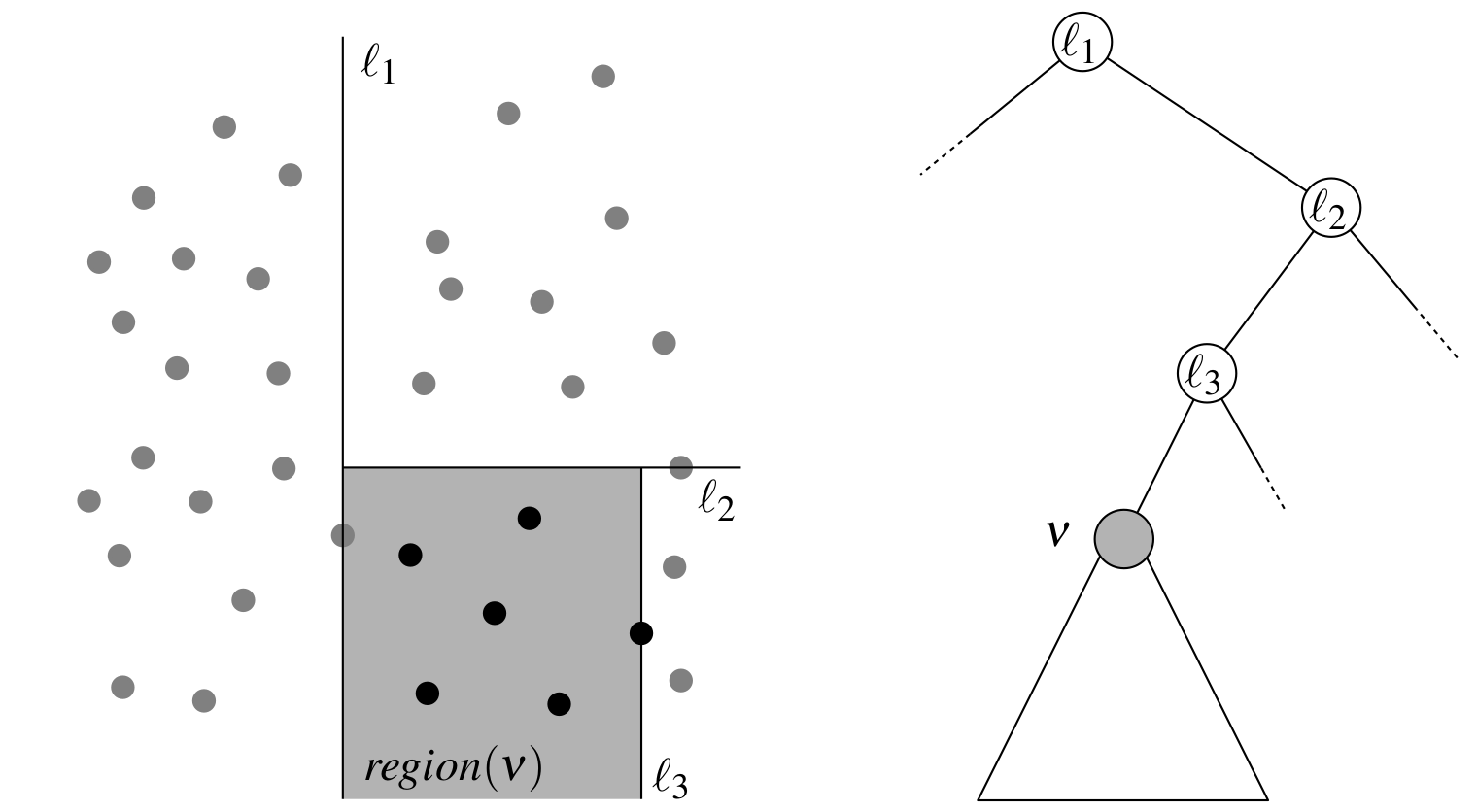
Construcción \( \mathcal{O}(N \log N) \)
Vecino más cercano, esperado \( \mathcal{O}(\log N) \), peor caso \( \mathcal{O}(N) \)
Búsqueda por centro y radio, peor caso \( \mathcal{O}(N) \)
En la práctica:
- Aproximados
- Muy rápidos
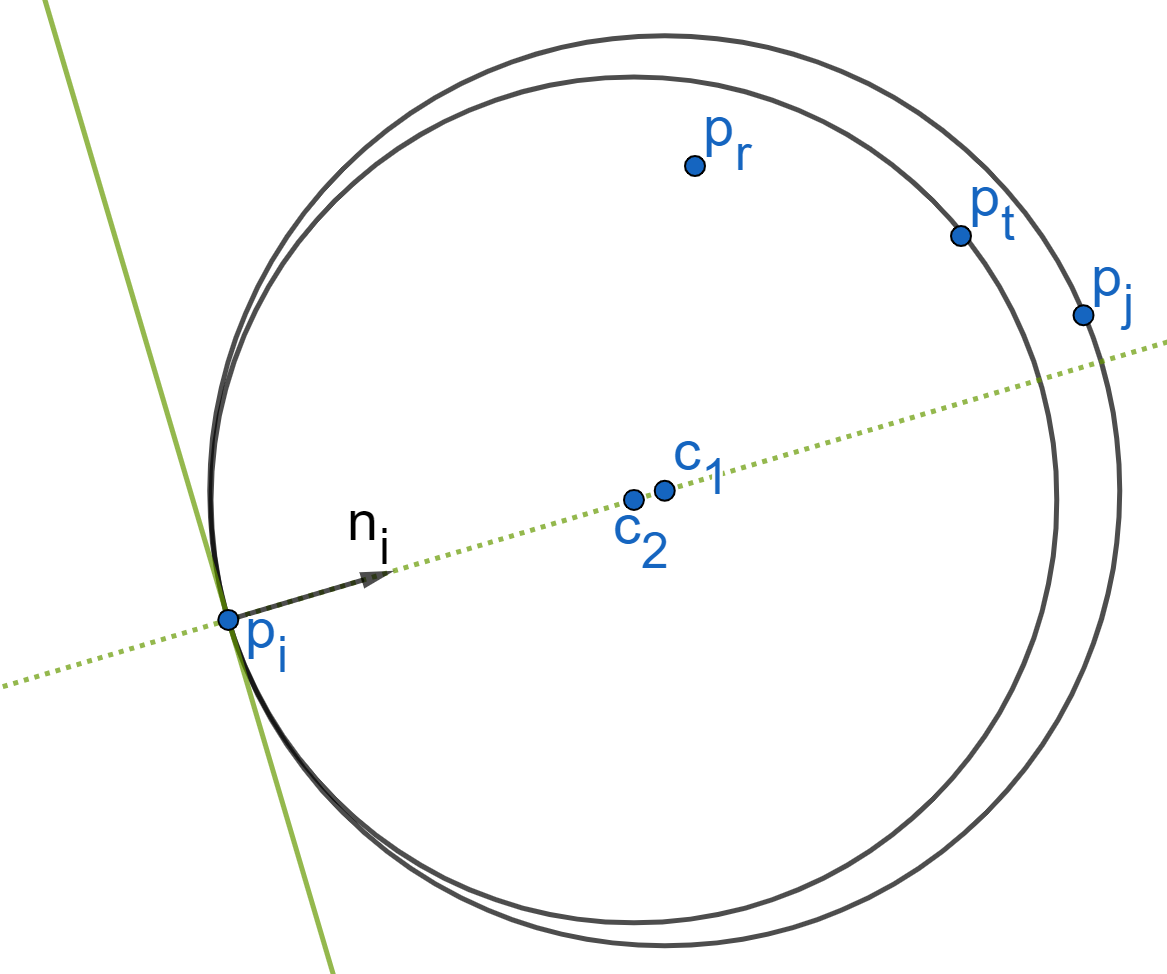
Pero esto tiene un problema...
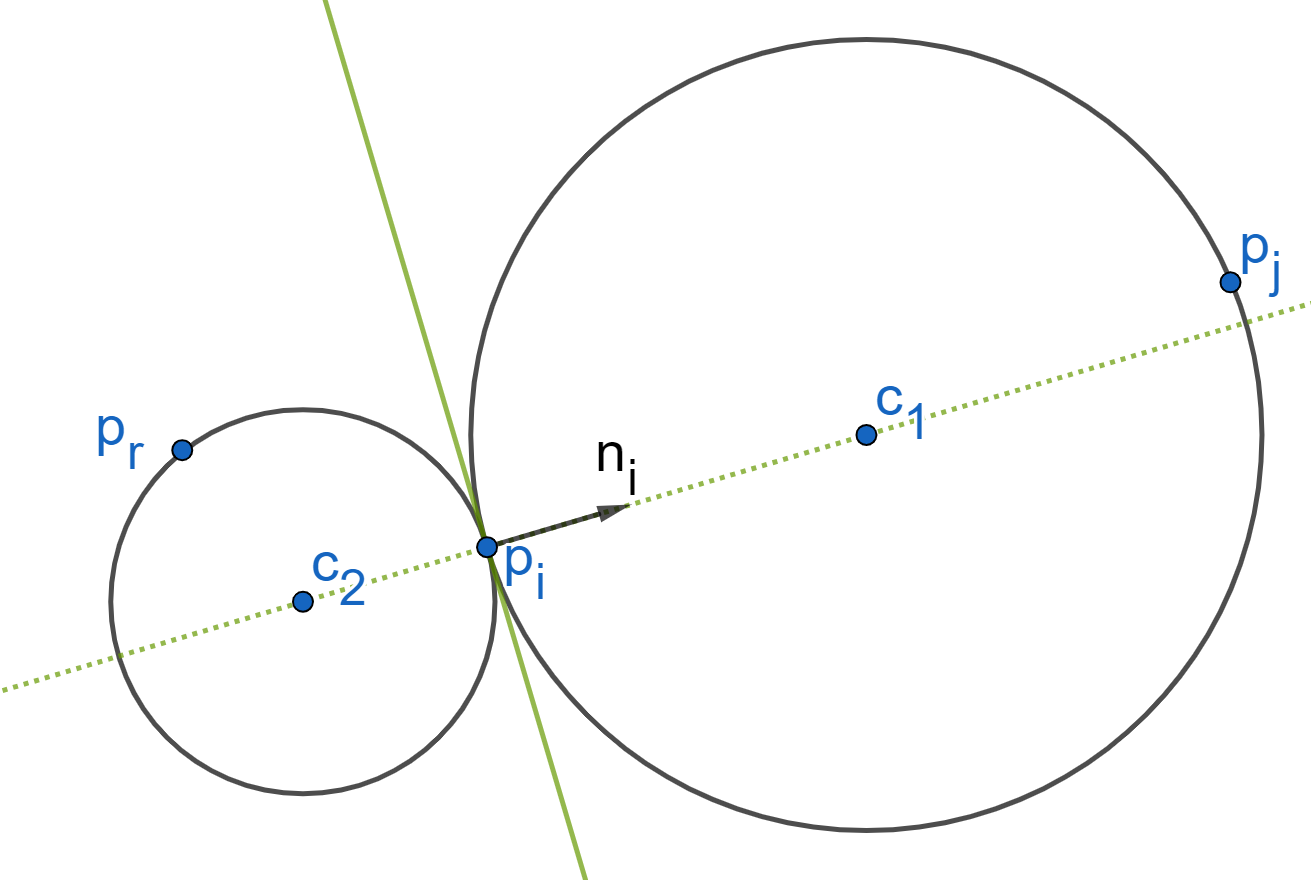
Es aproximado!, puede devolver \(p_r\), aunque deba devolver \(p_i\) o \(p_j\)
Pero esto tiene un problema...
En código...
Shrinking Ball
- Aproxima a un subconjunto de la MAT
- Todas las bolas son maximales
- Tocan en el punto
- Los centros están en la dirección de la normal
- Cuando la densidad de muestreo tiende a infinito, converge a la MAT.
- Tiempo esperado \( \mathcal{O}(N \log N) \), peor caso \( \mathcal{O}(N^2) \)
- En la práctica corre linearithmic
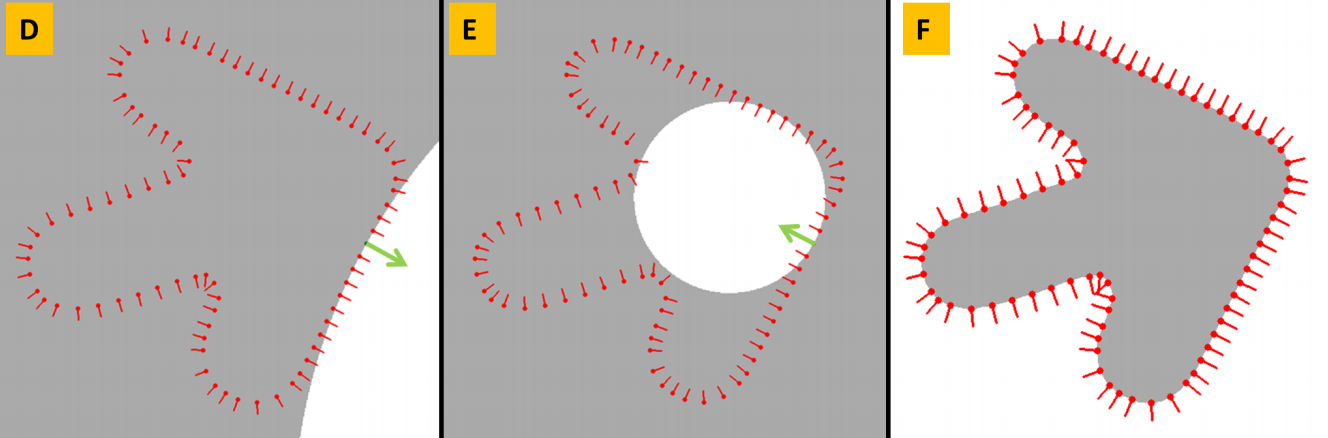
Shrinking Planes
para aproximación de la NCH
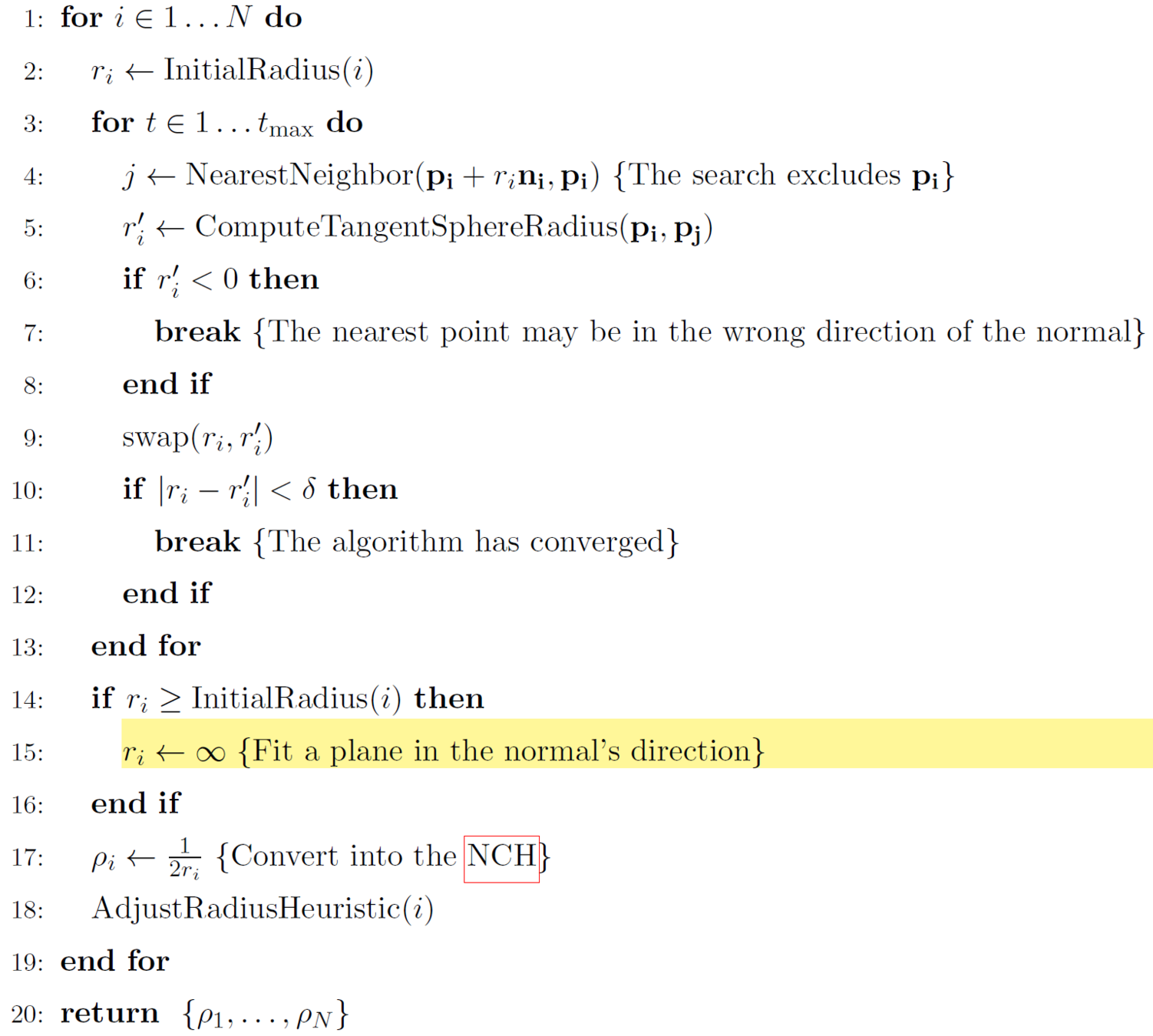
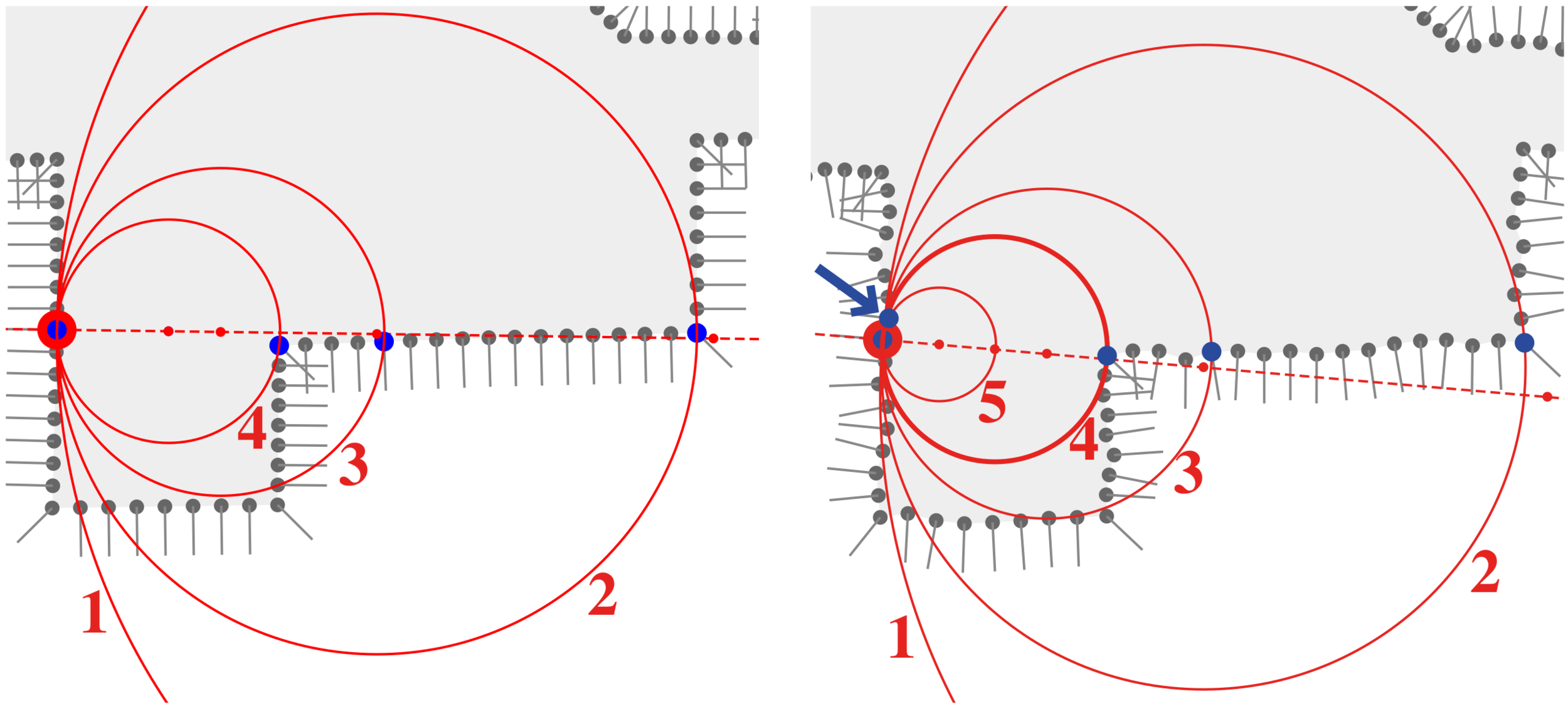
NCH = MAT + Planos
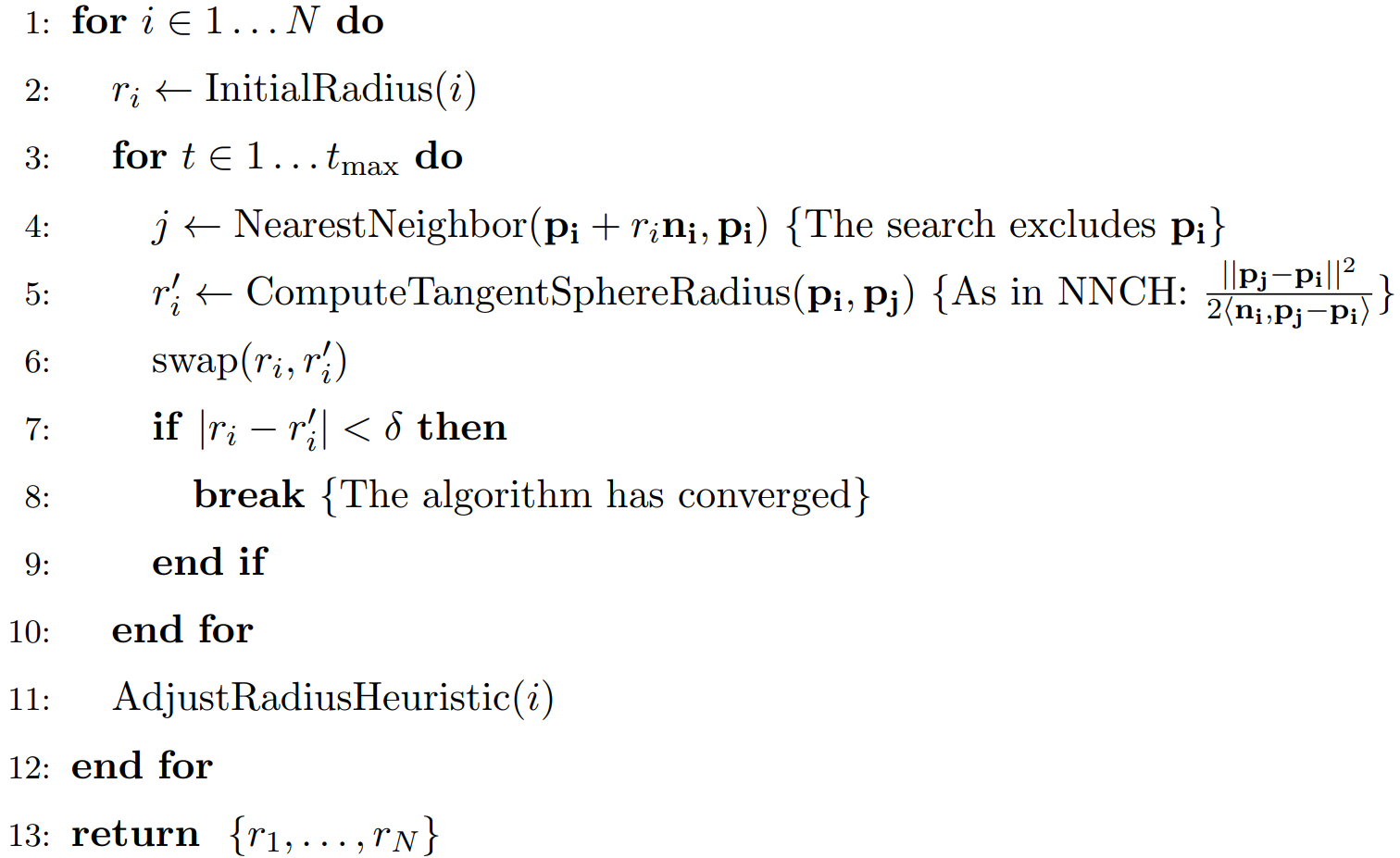
- Empezamos con un radio inicial excesivamente grande, a propósito
- Intentamos achicarlo usando Shrinking Ball
- Pudimos achicarlo?
- Sí. Entonces, \( \rho_i = \frac{1}{2 r_i} \), con \( r_i \) el radio
- No. Entonces \( \rho_i = 0 \), ponemos un plano
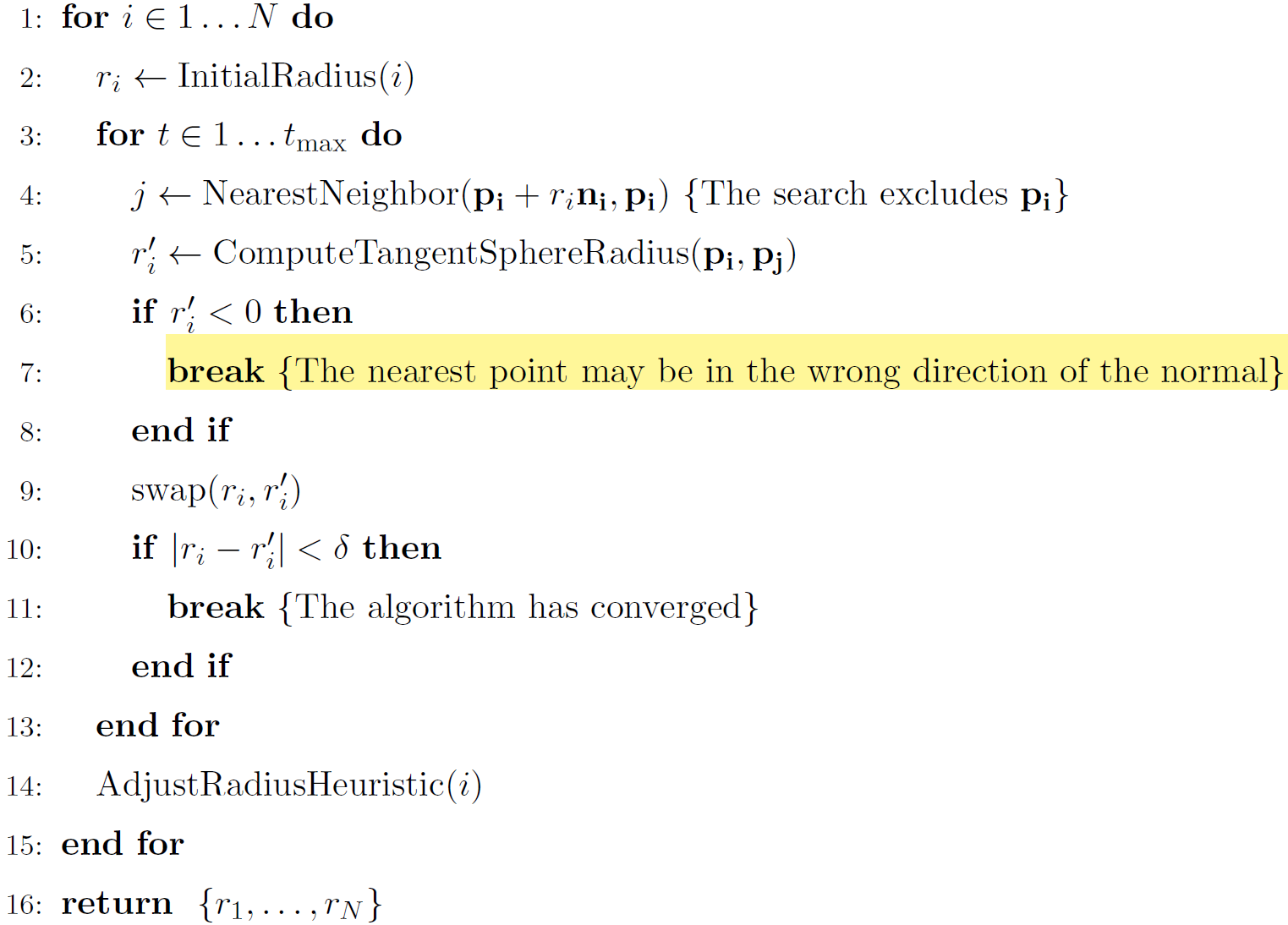
En código...
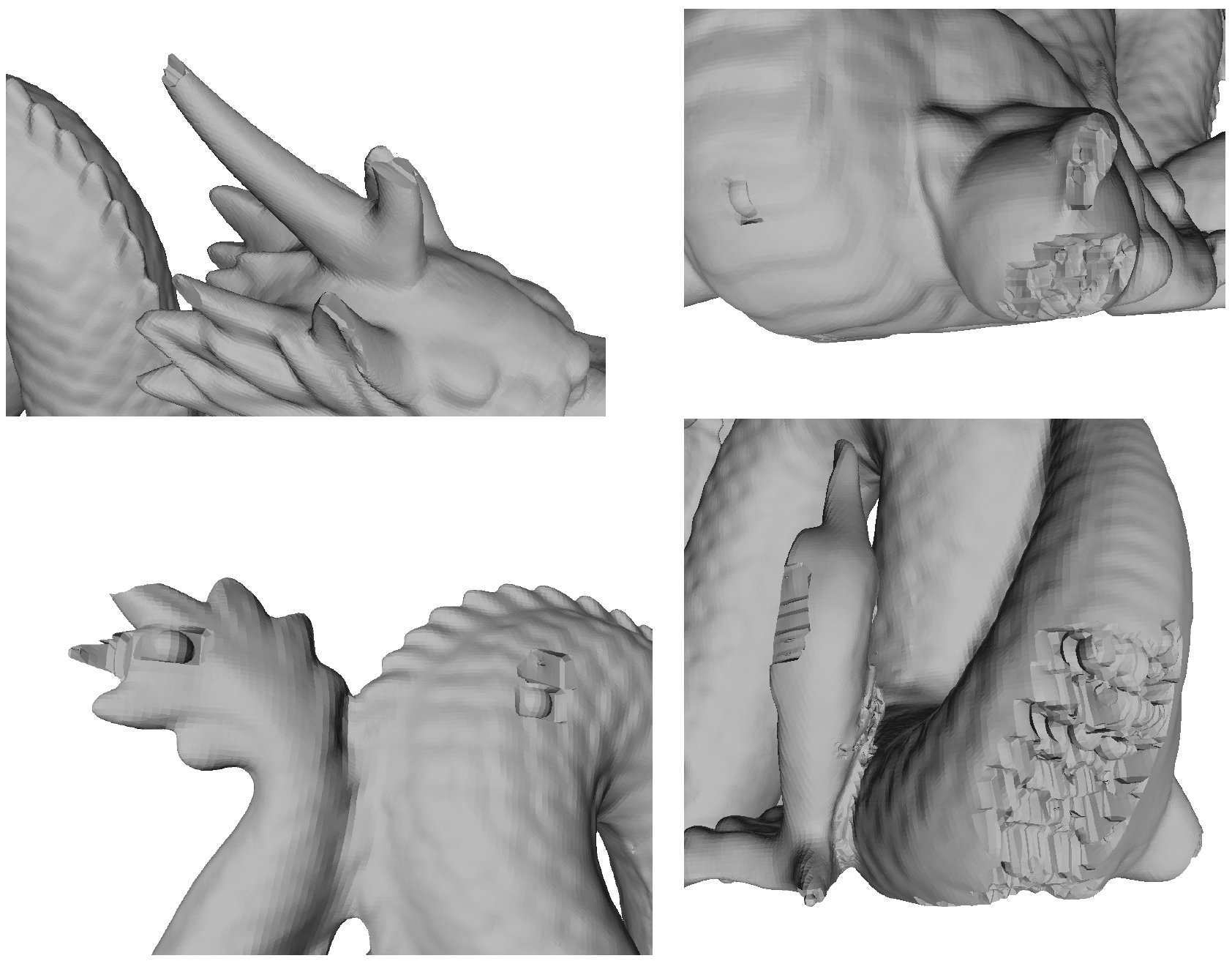
En la practica...
- Funciona muy bien para la mayoría de los casos
- Tiene problemas en ciertos casos, en general figuras complicadas:
Por qué?
- Los radios se vuelven cada vez más chicos.
- La diferencia en general también
- A veces, una diferencia muy chica entre un radio y el próximo hace que cortemos sin converger
En código...
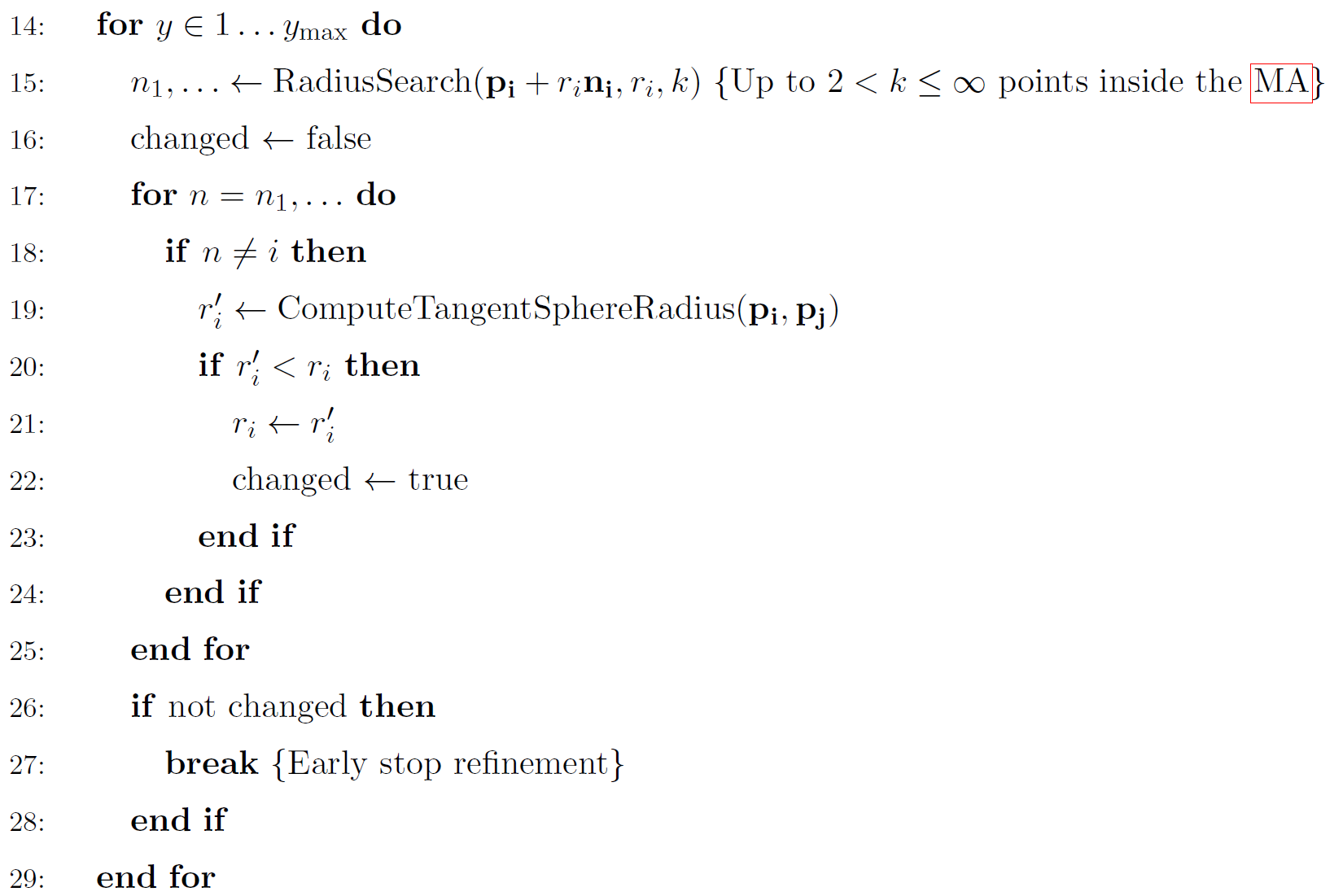
La intuición es...
- Queremos evitar que haya puntos adentro
- Bola muy grande, puntos muy dispersos
- Como NCH, pero sobre menos puntos
- Shrinking Ball genera una bola razonablemente chica. Entonces:
- Hacer una búsqueda por radio
- Achicar sólo usando los que están adentro
- Repetir hasta que no pase más
- Si no limitamos la cantidad de resultados de la búsqueda, el algoritmo es equivalente a NNCH
- Cuadrático de vuelta
- En la práctica funciona parecido a Shrinking Ball
Observaciones
- Ninguno de los algoritmos puede, a priori, obtener una mejor representación que NNCH
- Si SP o SB tienen error, sólo puede ser porque no achicaron lo suficiente
- Todos estos algoritmos van a hacer overfitting al ruido
Resultados
Cómo experimentamos
1
2
3
4
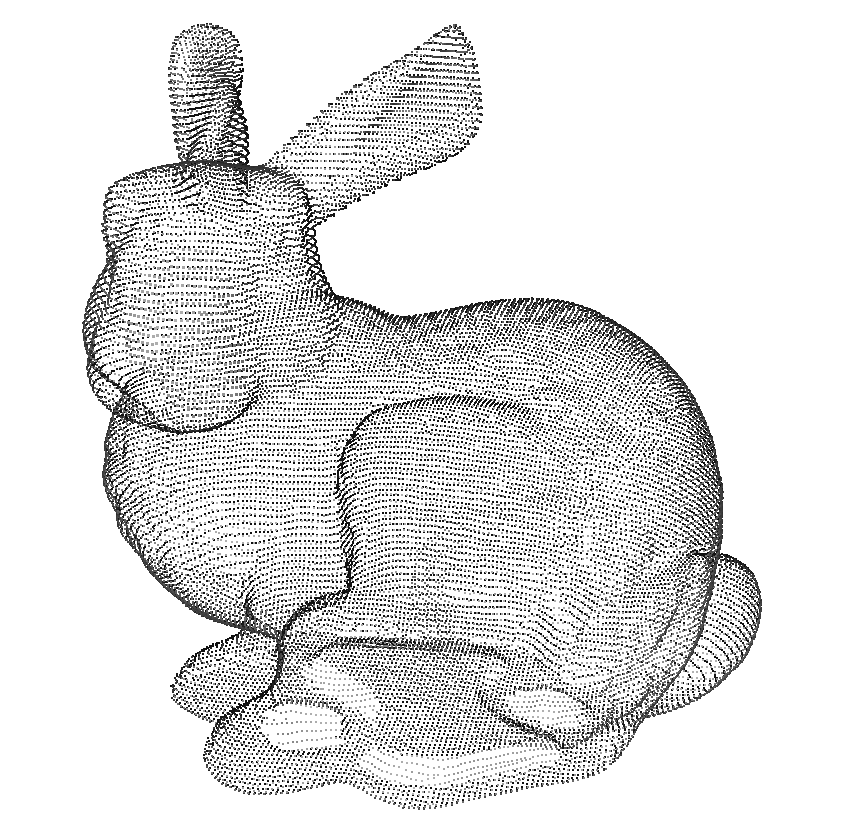
Malla Poligonal
Nube de Puntos
Estimación de Normales
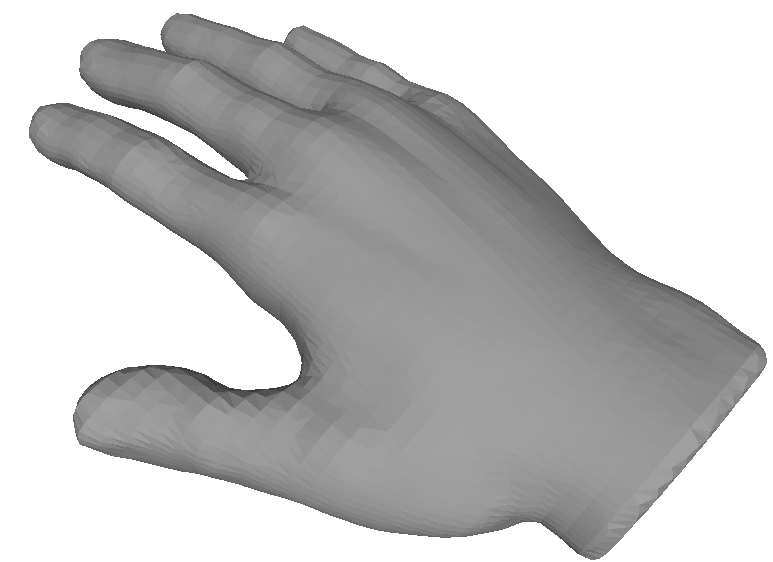
Reconstrucción e Isoextracción
Qué medimos
Nos interesa comparar qué tan buenos somos desde múltiples puntos de vista:
- Velocidad
- Uso de recursos
- Calidad de reconstrucción
- Sobre la aproximación de la NCH
- Calidad de la visualización
- Sobre la superficie final, si la malla se ve parecida al original
- En general, podemos modificar el algoritmo de isoextracción para obtener mejor calidad
Calidad de Aproximación
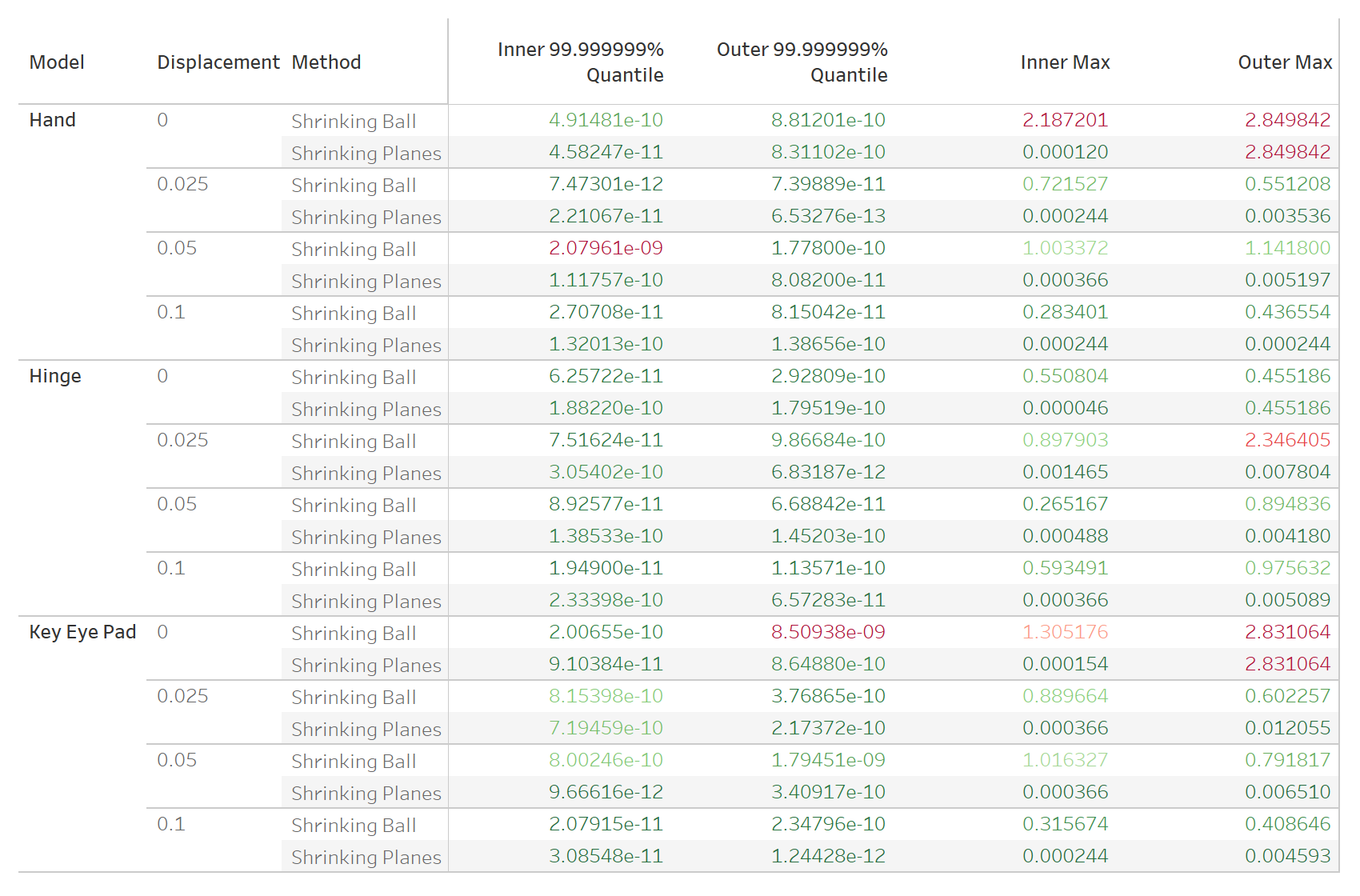
Si miramos \( | \rho_i^{+, \text{NNCH}} - \rho_i^{-, \text{SP}} | \), la distribución nos permite entender qué tan bien o mal aproximamos a la NCH, comparado con NNCH
En general, logramos errores menores a \( 10^{-11} \) en todos excepto 1 punto.
Además, SP es ordenes de magnitud mejor que SB
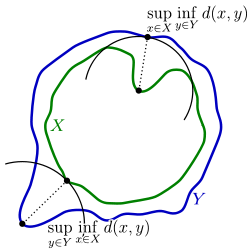
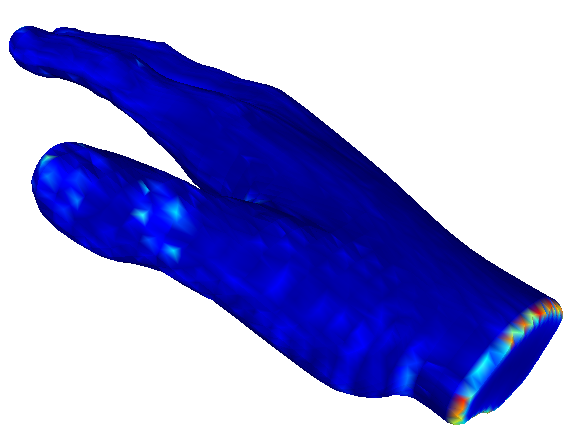
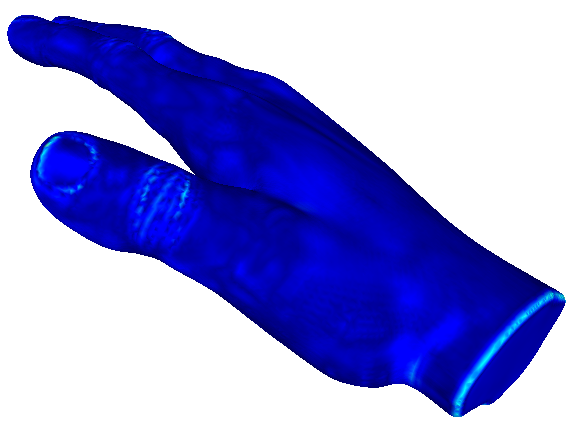
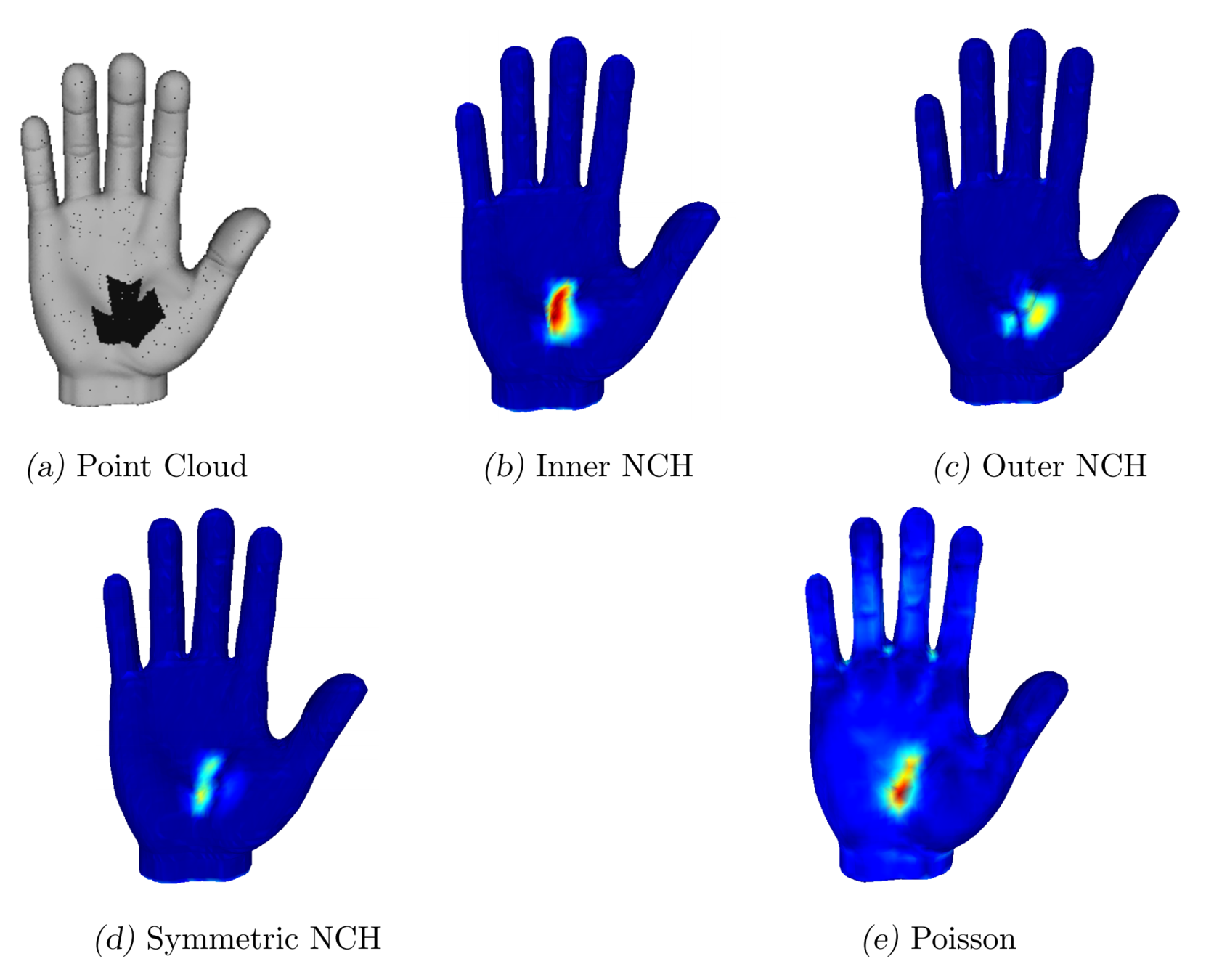
Calidad de Visualización
d_{\mathrm H}(X,Y) = \max\{\,\sup_{x \in X} \inf_{y \in Y} d(x,y),\, \sup_{y \in Y} \inf_{x \in X} d(x,y)\,\}
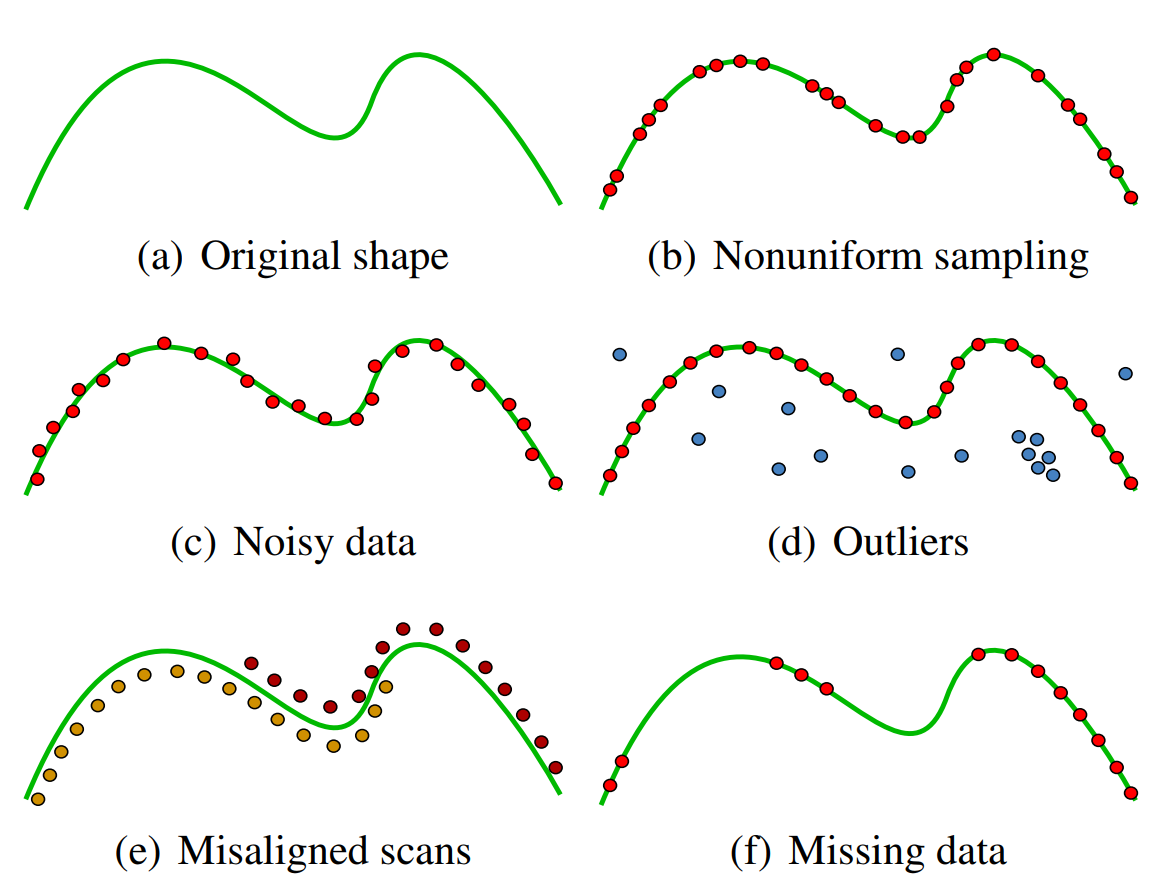
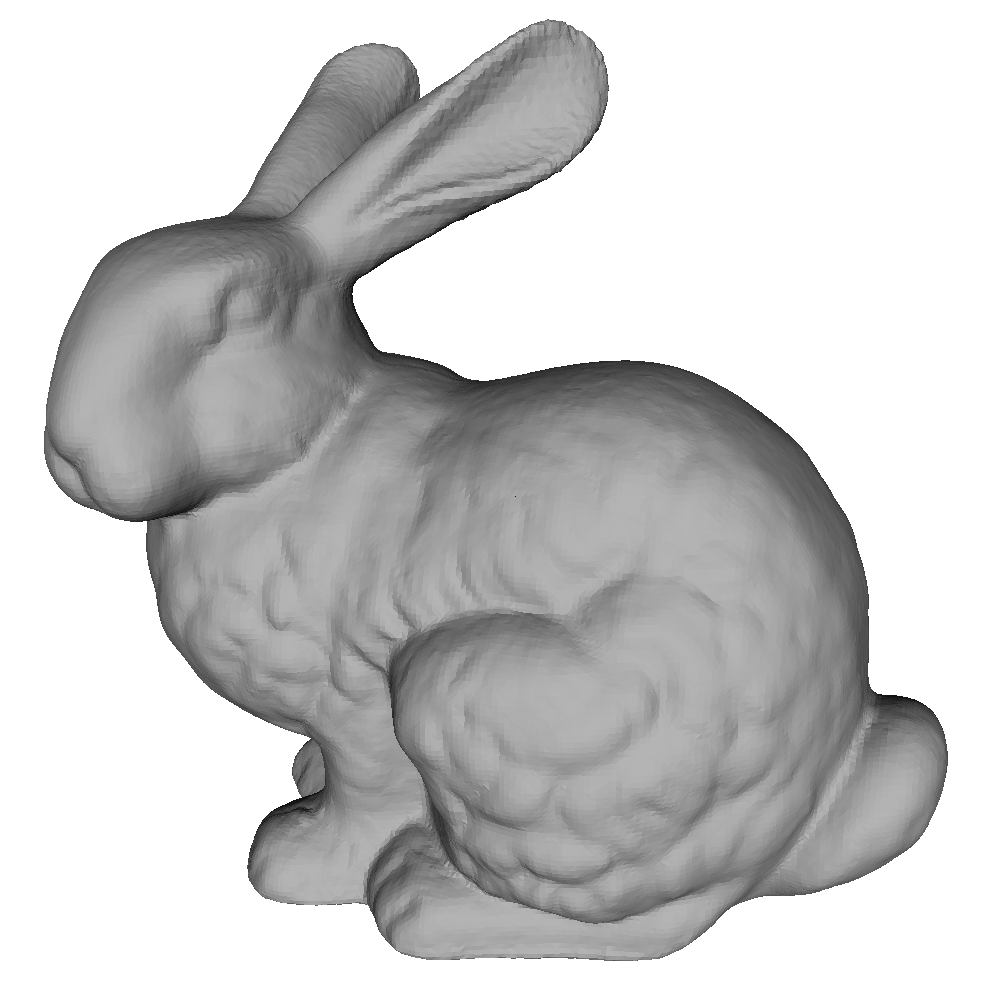
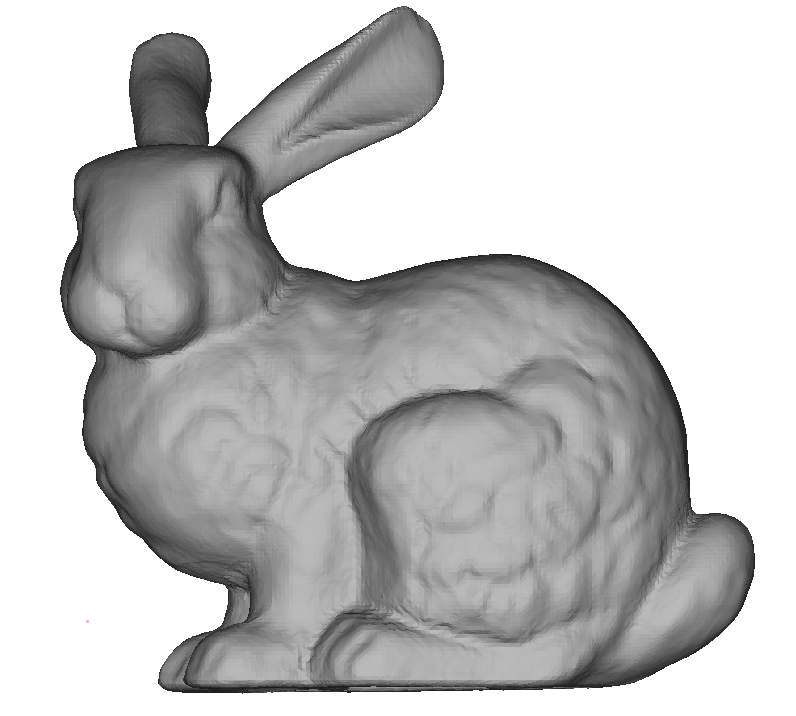
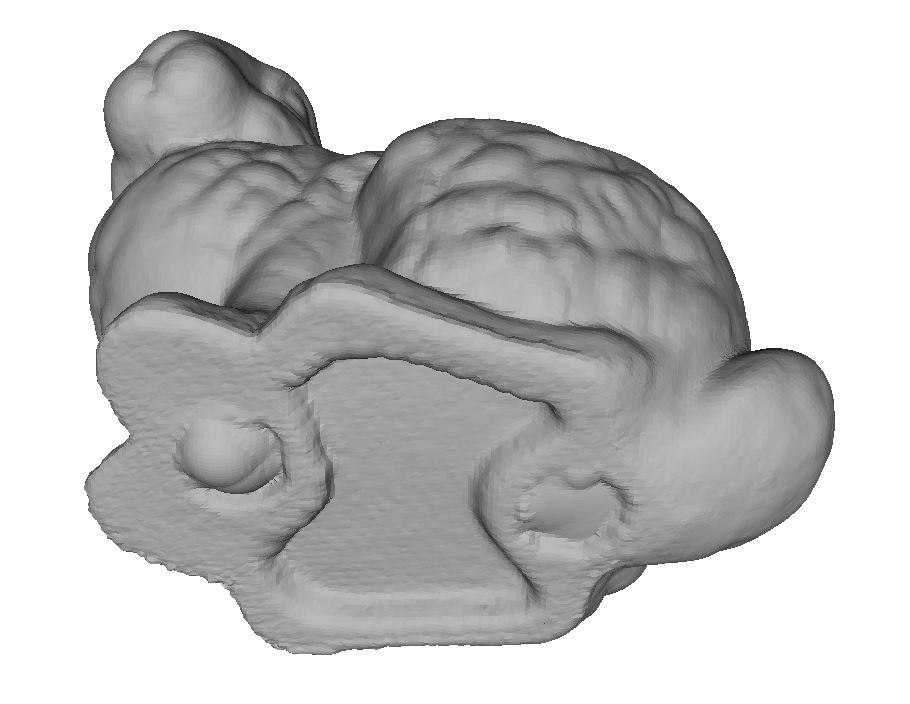
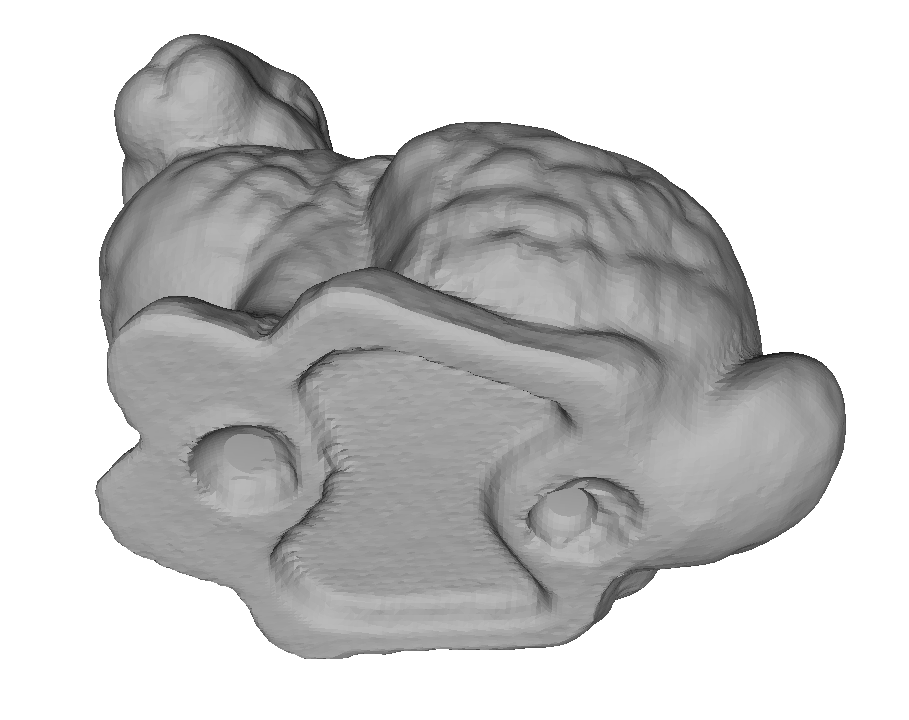
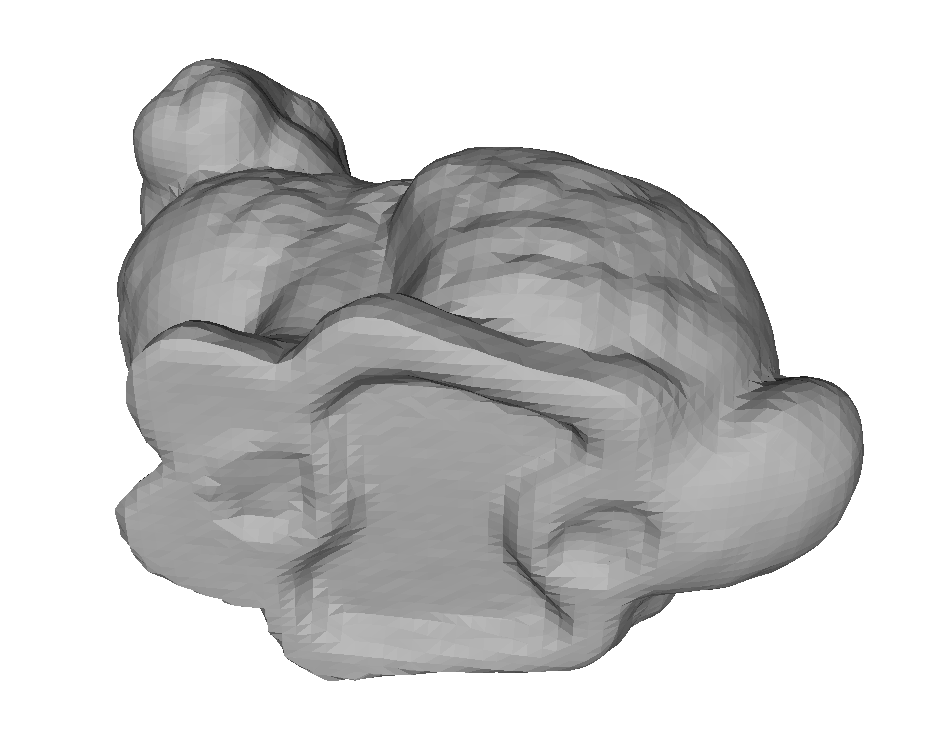
Experimentos con Ruido
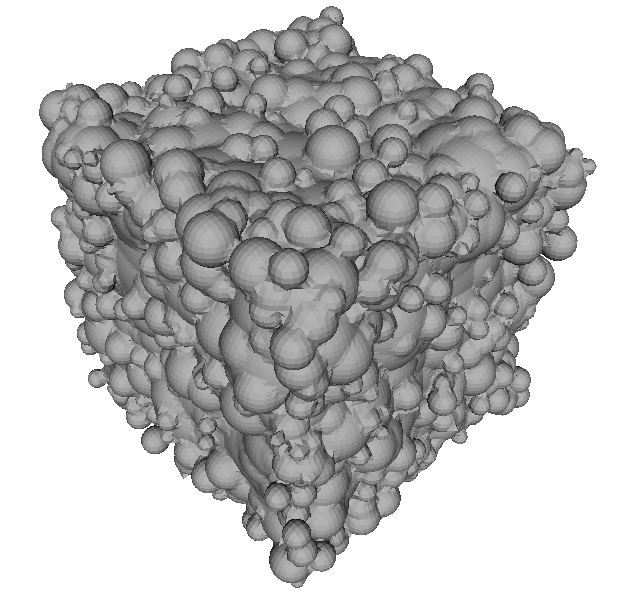
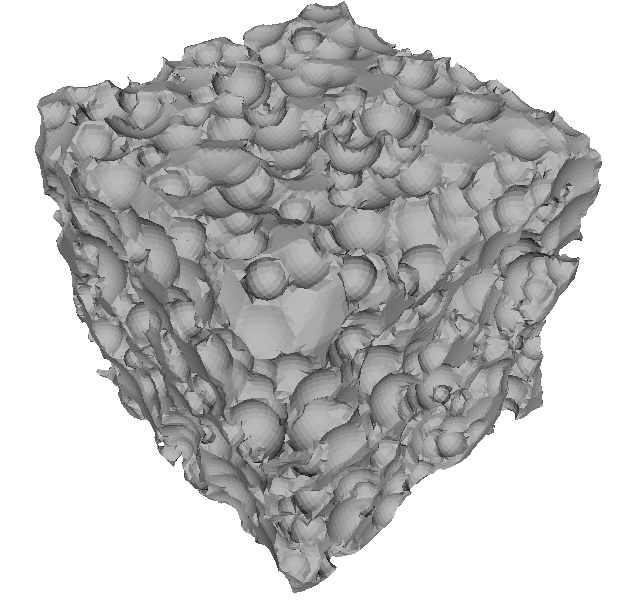
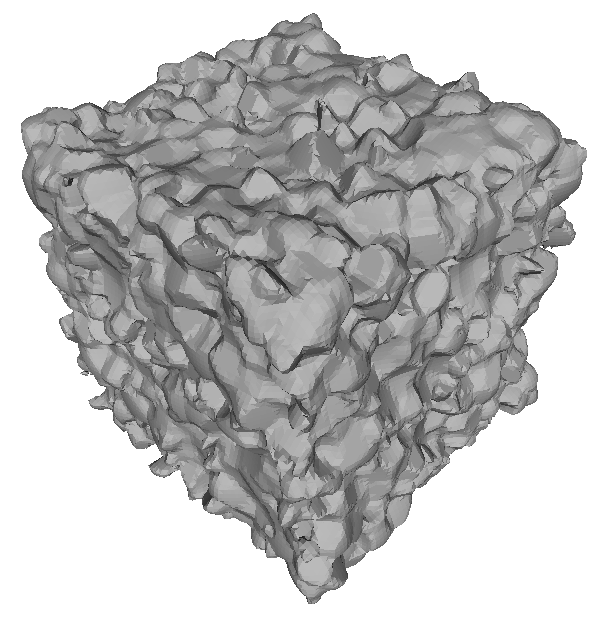

Inner NCH
Outer NCH
Symmetric NCH
Entrada
Estado del Arte
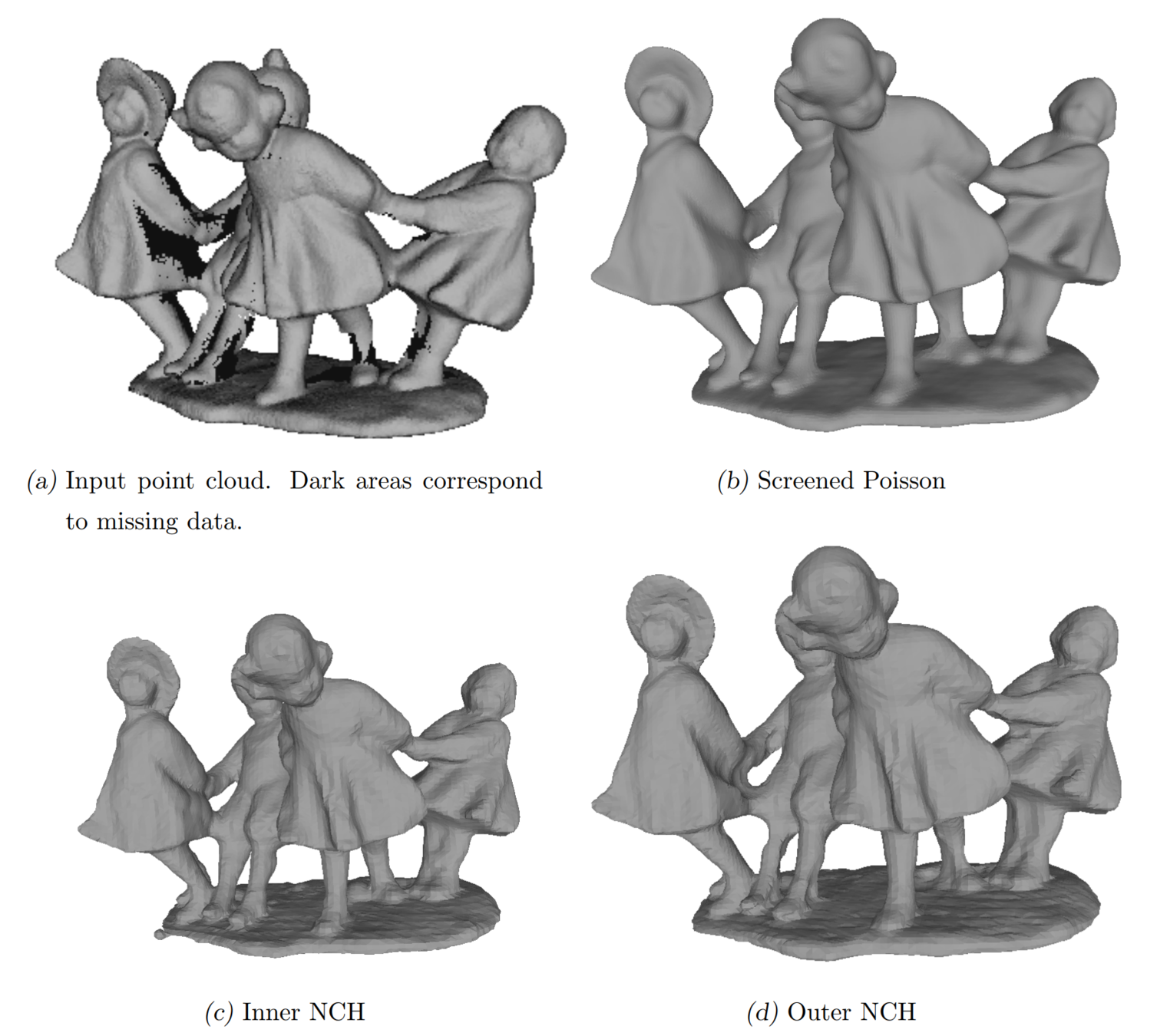
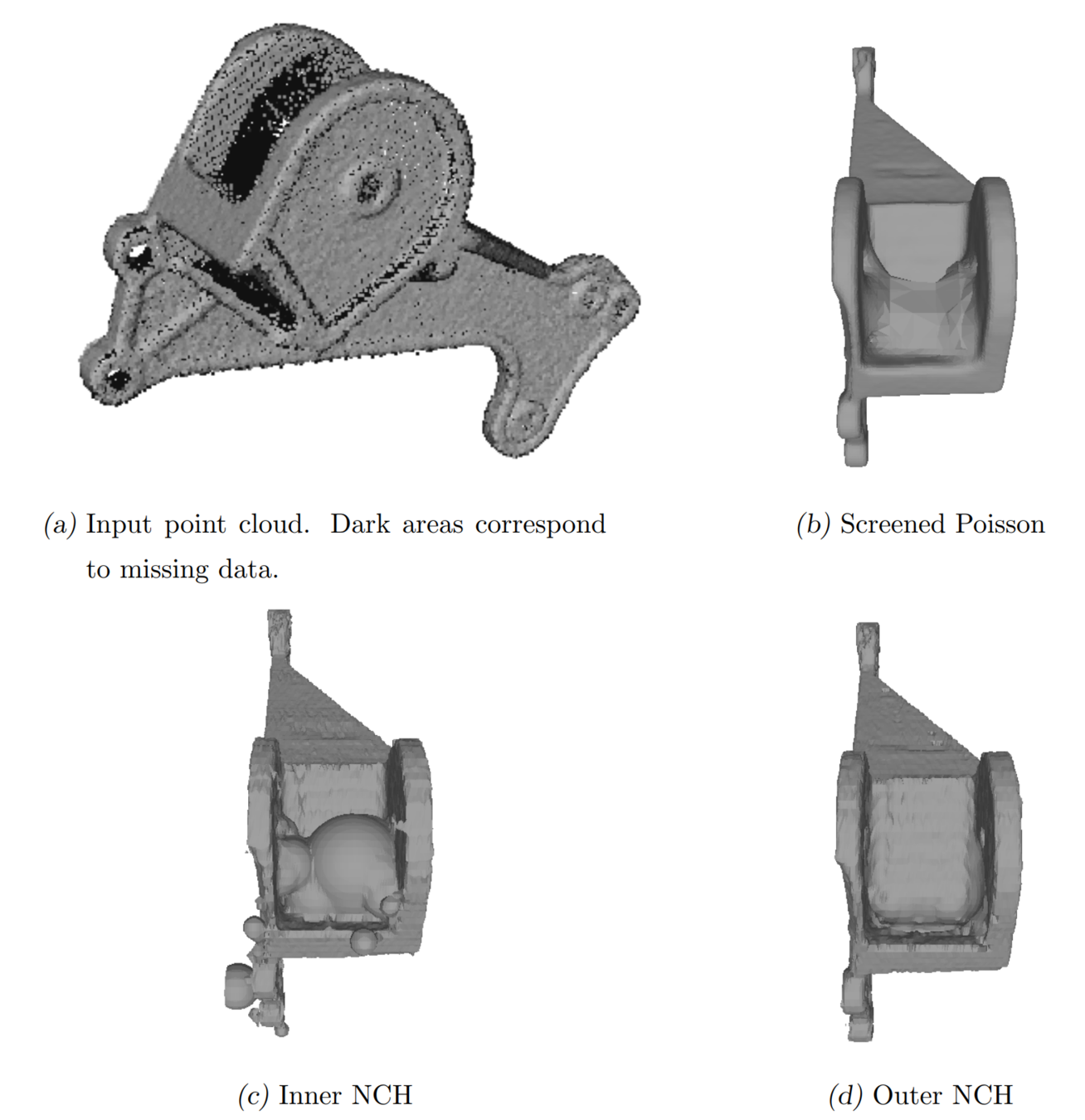
Experimentos con Falta de Datos
Experimentos con Escaneos Simulados
Experimentos con Escaneos Simulados
Uso de Memoria
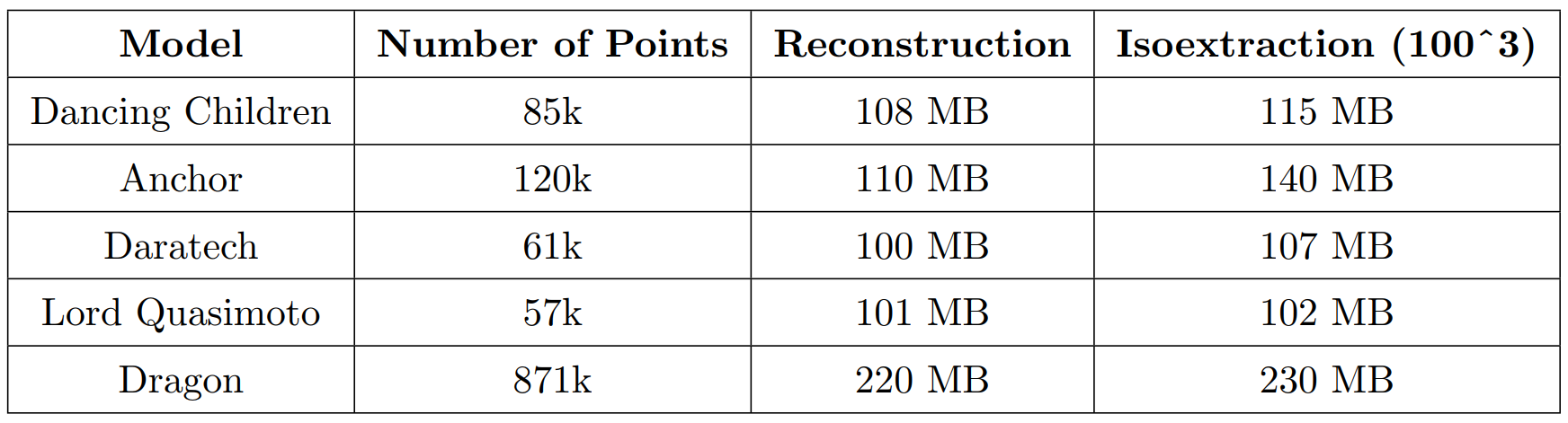
- Uso de memoria MUY bajo
- Además, \( \mathcal{O}(N) \)
- Ideal para:
- GPUs, donde la cantidad de memoria es comparativamente restringida
- Procesamiento de nubes de puntos a gran escala (i.e. cientos de millones)
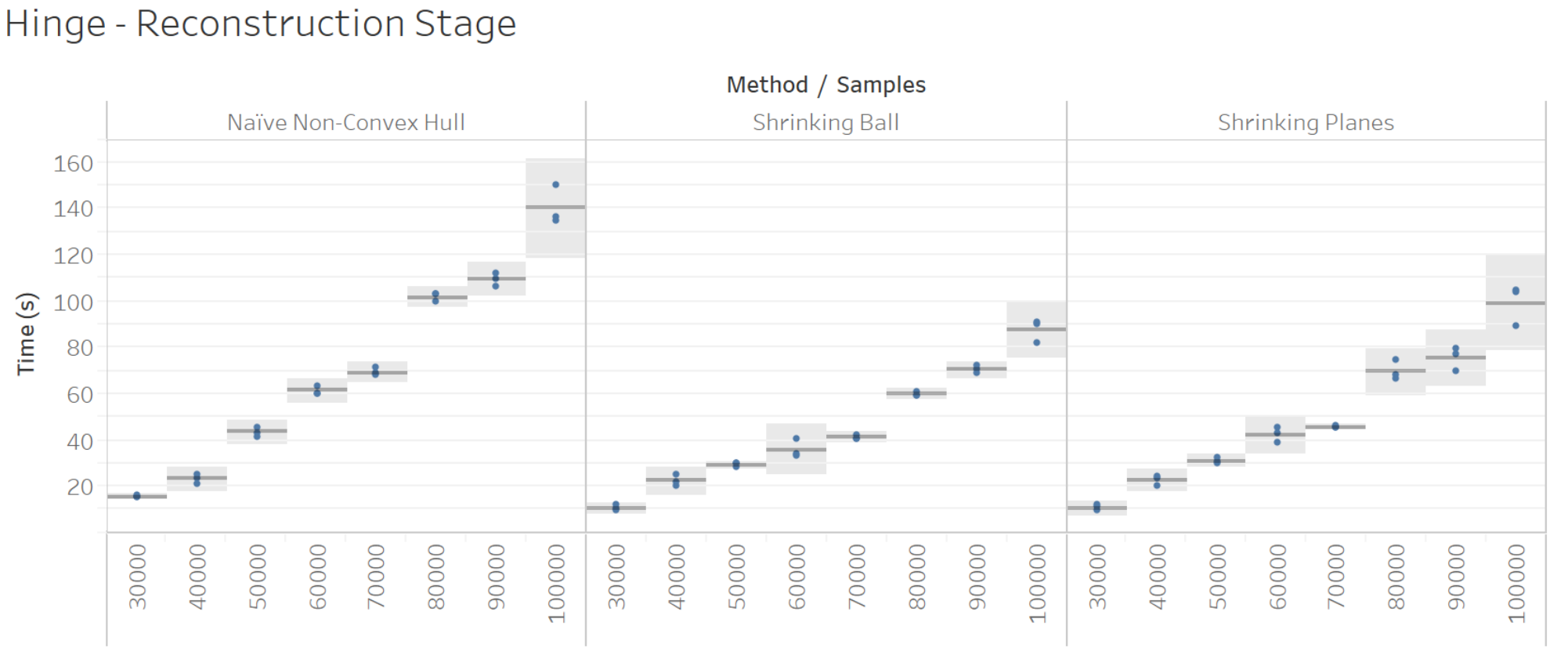
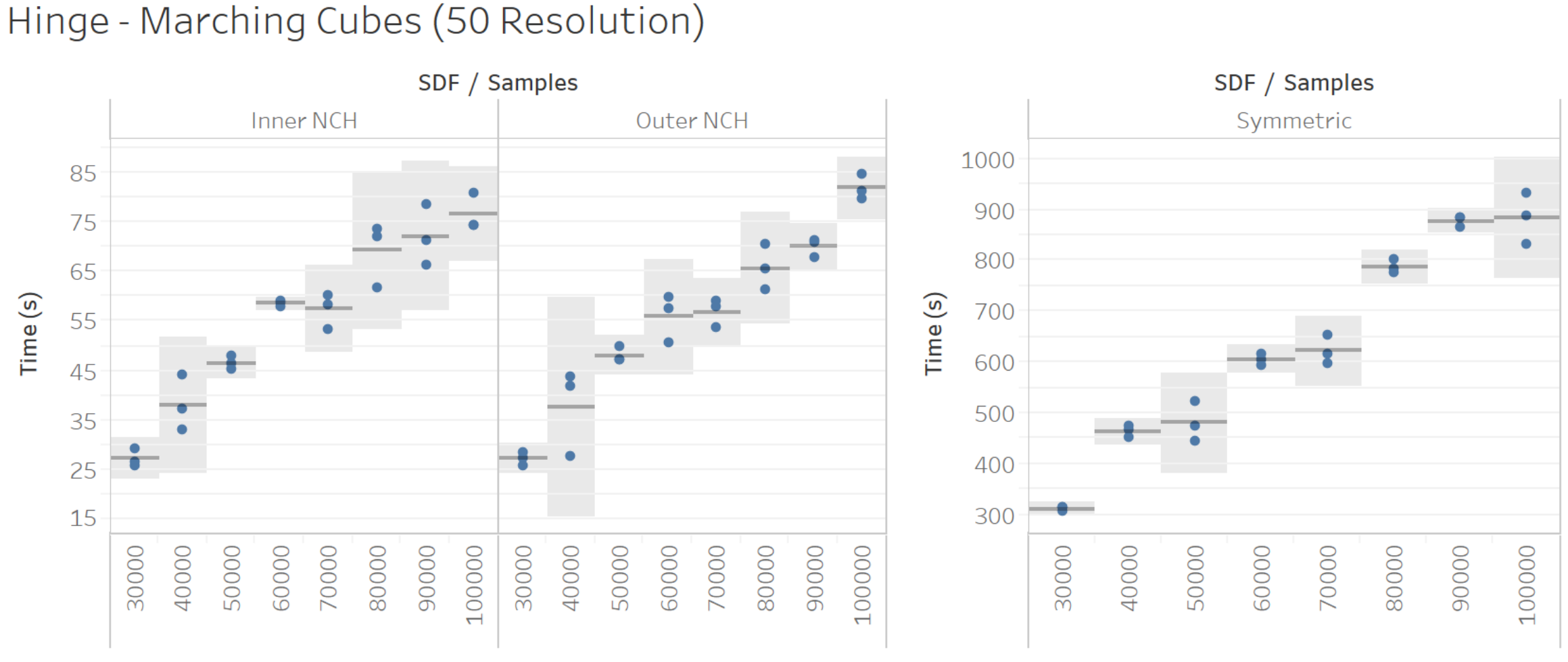
Performance
Conclusiones & Trabajo Futuro
Conclusiones
- Los nuevos métodos son sustancialmente más rápidos que NNCH
- Continúan siendo "embarrassingly parallel"
- Amenos a GPU y multiprocesamiento
- Muy bajo uso de recursos
- Vimos:
- Calidad superior de Outer NCH relativo a Inner
- La mejoría de la simétrica con respecto a ambos en presencia de ruido
- Las reconstrucciones son buenas cuando no hay ruido, pero la calidad empeora sustancialmente cuando sí lo hay
Trabajo a Futuro
- Implementación en GPU
- Vimos que los algoritmos son paralelizables
- Se puede bajar la velocidad de procesamiento al orden de decenas de milisegundos en la GPU
- Implementación Out-Of-Core
- Para procesar nubes de puntos muy grandes, es necesario poder tener la información guardada en disco
- Reconstrucción adaptiva
- En general, podemos eliminar puntos donde no necesitamos mayor nivel de detalle
- Isoextracción suave
- El problema del ruido es la suavidad, y hay formas de evitarlo
- ... Y muchas más!, leer la tesis
Gracias!

Aproximación Eficiente de la Cápsula No-Convexa para Reconstrucción de Superficies
By Julian Bayardo
