Yes, my network works!
Jeremias Sulam
... but what did it learn?
2024 Mathematical and Scientific Foundations of Deep Learning Annual Meeting


"The biggest lesson that can be read from 70 years of AI research is that general methods that leverage computation are ultimately the most effective, and by a large margin. [...] Seeking an improvement that makes a difference in the shorter term, researchers seek to leverage their human knowledge of the domain, but the only thing that matters in the long run is the leveraging of computation. [...]
We want AI agents that can discover like we can, not which contain what we have discovered."The Bitter Lesson, Rich Sutton 2019
What did my model learn?
PART I
Inverse Problems
PART II
Image Classification
Inverse Problems
y = A x^* + v
measurements
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + R(x)
reconstruction
Inverse Problems
y = A x^* + v
measurements
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + R(x)
reconstruction
= \arg\min_x ~-\log p(y|x) - \log p(x)
= \arg\max_x~ p(x|y)
\text{MAP estimate when }R(x) \propto -~p_x(x):\text{ prior}
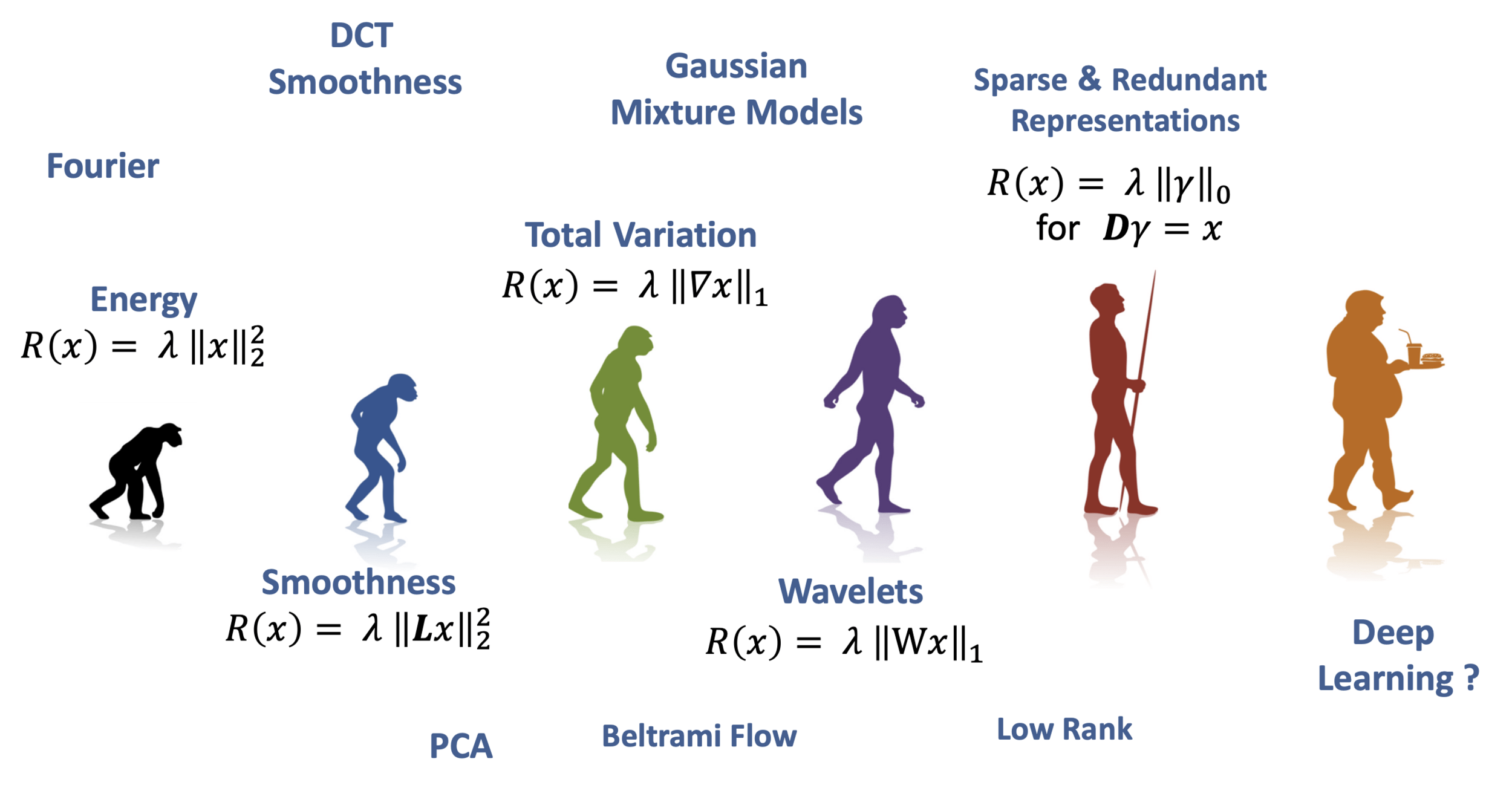
Image Priors
Deep Learning in Inverse Problems
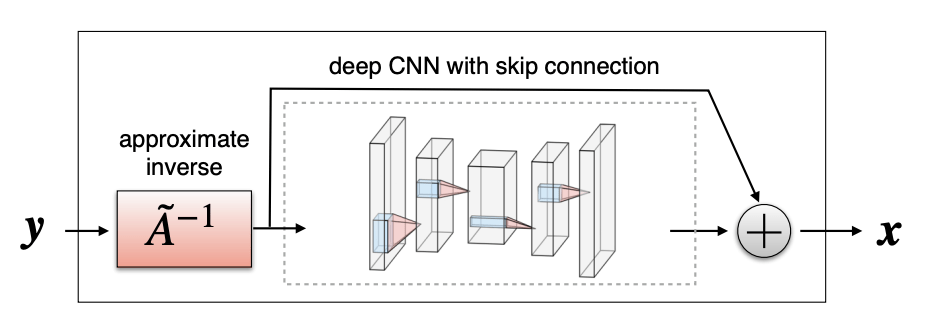
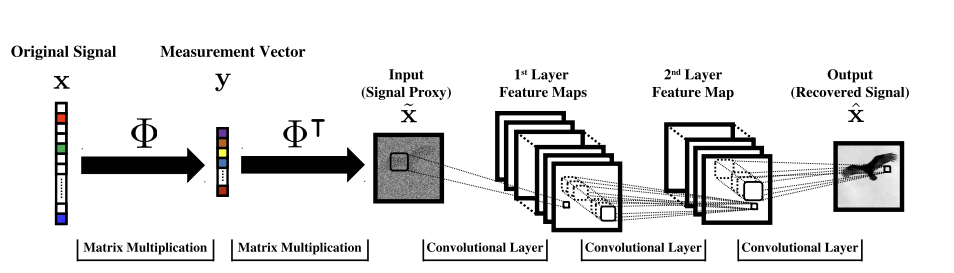
Option A: One-shot methods
Given enough training pairs \({(x_i,y_i)}\) train a network
\(f_\theta(y) = g_\theta(A^+y) \approx x\)
[Mousavi & Baraniuk, 2017]
[Ongie, Willet, et al, 2020]
Deep Learning in Inverse Problems
Option B: data-driven regularizer
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + {\color{Green}\hat R_\theta(x)}
- Priors as critics
[Lunz, Öktem, Schönlieb, 2020] and others ..
\displaystyle \hat R_\theta(x) = \arg\min_{R_\theta\in
\mathcal H} ~ \mathbb E_{x\sim p_x}[R(x)] - \mathbb E_{x\sim q }[R(x)]
- via MLE
[Ye Tan, ..., Schönlieb, 2024], ...
- RED
[Romano et al, 2017] ...
- Generative Models
[Bora et al, 2017] ...
\displaystyle \hat R_\theta(x) = \mathbb 1_{[\exist z : G(z)=x]}
Deep Learning in Inverse Problems
Option C: Implicit Priors
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + R(x)
Proximal Gradient Descent: \( x^{t+1} = \text{prox}_R \left(x^t - \eta A^T(Ax^t-y)\right) \)
\text{prox}_R \left( u \right) = \arg\min_x \frac 12 \|u - x\|_2^2 + R(x)
\text{prox}_R \left( u \right) = \texttt{MAP}(X|u), \qquad u = x + v
... a denoiser
Deep Learning in Inverse Problems
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + R(x)
any latest and greatest NN denoiser

[Venkatakrishnan et al., 2013; Zhang et al., 2017b; Meinhardt et al., 2017; Zhang et al., 2021; Kamilov et al., 2023b; Terris et al., 2023]
[Gilton, Ongie, Willett, 2019]
Proximal Gradient Descent: \( x^{t+1} = {\color{red}f_\theta} \left(x^t - \eta A^T(A(x^t)-y)\right) \)
Option C: Implicit Priors
Question 1)
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\) ? and for what \(R(x)\)?
Deep Learning in Inverse Problems
\(\mathcal H_\text{prox} = \{f : \text{prox}_R~ \text{for some }R\}\)
\(\mathcal H = \{f: \mathbb R^n \to \mathbb R^n\}\)
Question 1)
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\) ? and for what \(R(x)\)?
Question 2)
Can we estimate the "correct" prox?
Deep Learning in Inverse Problems
\text{prox}_R : R(x) = -\log p_x(x)
\(\mathcal H_\text{prox} = \{f : \text{prox}_R~ \text{for some }R\}\)
\(\mathcal H = \{f: \mathbb R^n \to \mathbb R^n\}\)
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + R(x)
= \arg\min_x ~-\log p(y|x) - \log p(x)
= \arg\max_x~ p(x|y)
Interpretable Inverse Problems
Question 1)
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\) ?
Theorem [Gibonval & Nikolova, 2020]
\( f(x) \in \text{prox}_R(x) ~\Leftrightarrow \exist ~ \text{convex l.s.c.}~ \psi: \mathbb R^n\to\mathbb R : f(x) \in \partial \psi(x)~\)
Interpretable Inverse Problems
Question 1)
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\) ?
\(R(x)\) need not be convex
Theorem [Gibonval & Nikolova, 2020]
Learned Proximal Networks
Take \(f_\theta(x) = \nabla \psi_\theta(x)\) for convex (and differentiable) \(\psi_\theta\)
\( f(x) \in \text{prox}_R(x) ~\Leftrightarrow \exist ~ \text{convex l.s.c.}~ \psi: \mathbb R^n\to\mathbb R : f(x) \in \partial \psi(x)~\)
Interpretable Inverse Problems
Question 1)
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\) ?
\(R(x)\) need not be convex
Learned Proximal Networks
Take \(f_\theta(x) = \nabla \psi_\theta(x)\) for convex (and differentiable) \(\psi_\theta\)
\( f(x) \in \text{prox}_R(x) ~\Leftrightarrow \exist ~ \text{convex l.s.c.}~ \psi: \mathbb R^n\to\mathbb R : f(x) \in \partial \psi(x)~\)
Theorem [Gribonval & Nikolova, 2020]
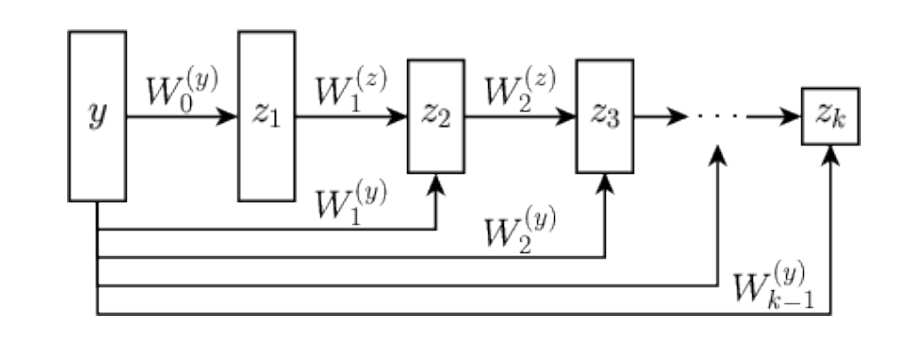
\psi_\theta : \mathbb R^d \to \mathbb R \text{ given by } \psi_\theta(y) = w^Tz_K + b \text{ and }
z_1 = g(H_1y+b_1), \quad z_k = g(W_k z_{k-1} + H_ky + b_k ), k\in [2,K]
g: \text{convex, non-decreasing, } W_k \text{ and }w_K: \text{non-negative entries}.
\left( \psi_\theta(x,\alpha) = \psi_\theta(x) + \frac \alpha 2 \|x\|^2_2 \right)
Interpretable Inverse Problems
If so, can you know for what \(R(x)\)?
R_\theta(x) = \langle {\color{red}\hat{f}^{-1}_\theta(x)},x\rangle - \frac 12 \|x\|^2_2 - \psi_\theta( {\color{red}\hat{f}^{-1}_\theta(x)} )
[Gibonval & Nikolova]
Easy! \[{\color{grey}y^* =} \arg\min_{y} \psi(y) - \langle y,x\rangle {\color{grey}= \hat{f}_\theta^{-1}(x)}\]
Interpretable Inverse Problems
Question 2)
Could we have \(R(x) = -\log p_x(x)\)?
(we don't know \(p_x\)!)
\text{Let } y = x+v , \quad ~ x\sim p_x, ~~v \sim \mathcal N(0,\sigma^2I)
f_\theta = \arg\min_{f_\theta:\text{prox}} \mathbb E_{x,y} \left[ {\ell (f_\theta(y),x)} \right]
\bullet ~~ {\ell (f_\theta(y),x)} = \|f_\theta(y) - x\|^2_2 ~~\implies~~ \mathbb E[x|y] \text{ (MMSE)}
\bullet ~~ {\ell (f_\theta(y),x)} = \|f_\theta(y) - x\|_1 ~~\implies~~ \texttt{median}(p_{x|y})
i.e. \(f_\theta(y) = \text{prox}_R(y) = \texttt{MAP}(x|y)\)
Which loss function?
Interpretable Inverse Problems
i.e. \(f_\theta(y) = \text{prox}_R(y) = \texttt{MAP}(x|y)\)
Theorem (informal)
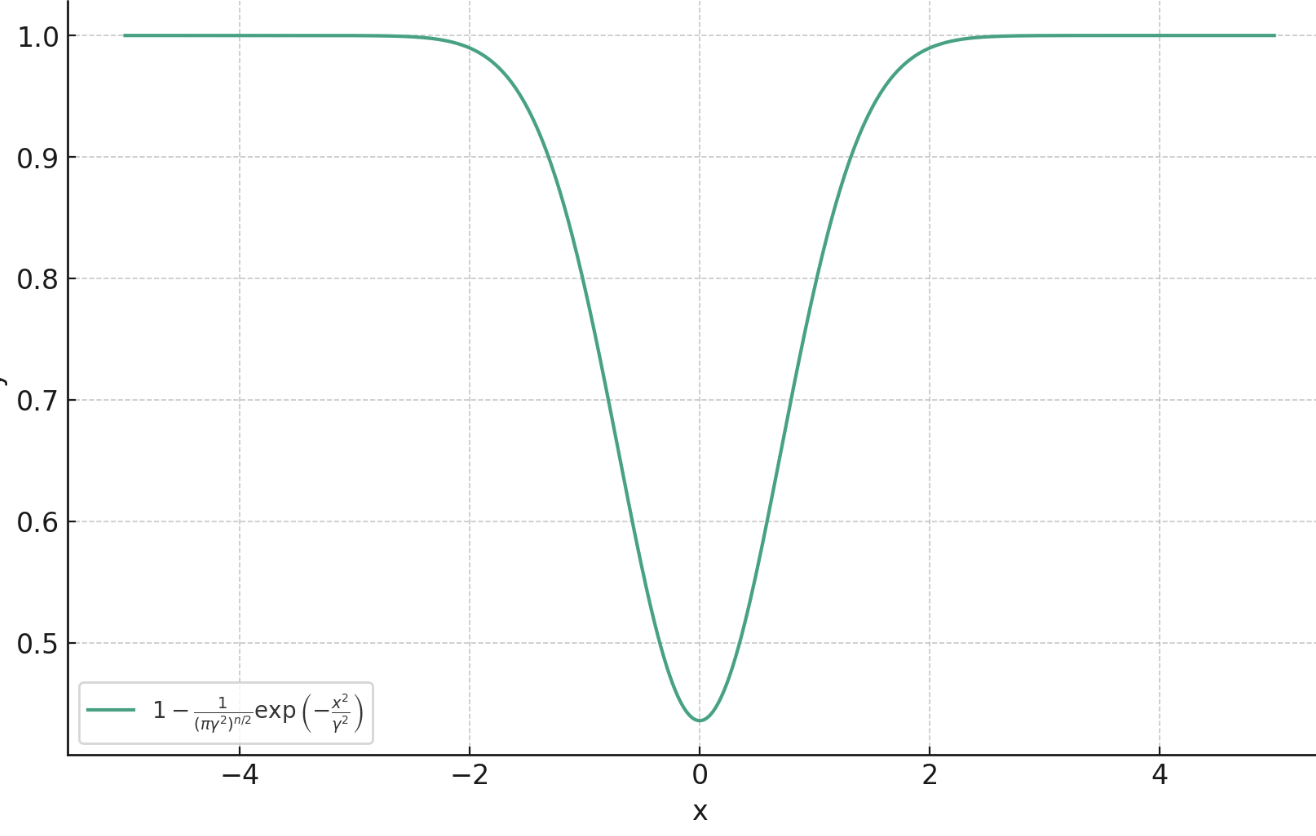
\hat{f}^* = \arg\min_{f} \lim_{\gamma \searrow 0}~ \mathbb E_{x,y} \left[ \ell^\gamma_\text{PM}(f_\theta(y),x)\right]
\hat{f}^*(y) = \arg\max_c p_{x|y}(c) = \text{prox}_{-\sigma^2\log p_x}(y)
\ell^\gamma_\text{PM} (f_\theta(y),x) = 1- \frac{1}{(\pi\gamma^2)^{n/2}} \exp\left( -\frac{\|f(y)-x\|_2^2}{\gamma} \right)
Proximal Matching Loss
\(\gamma\)
Question 2)
Could we have \(R(x) = -\log p_x(x)\)?
(we don't know \(p_x\)!)
Learned Proximal Networks
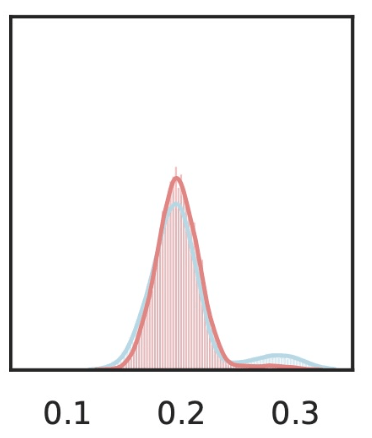
\text{Sample } y = x+v,~ \text{ with } x \sim \text{Laplace}(0,1) \text{ and } v \sim \mathcal N(0,\sigma^2)
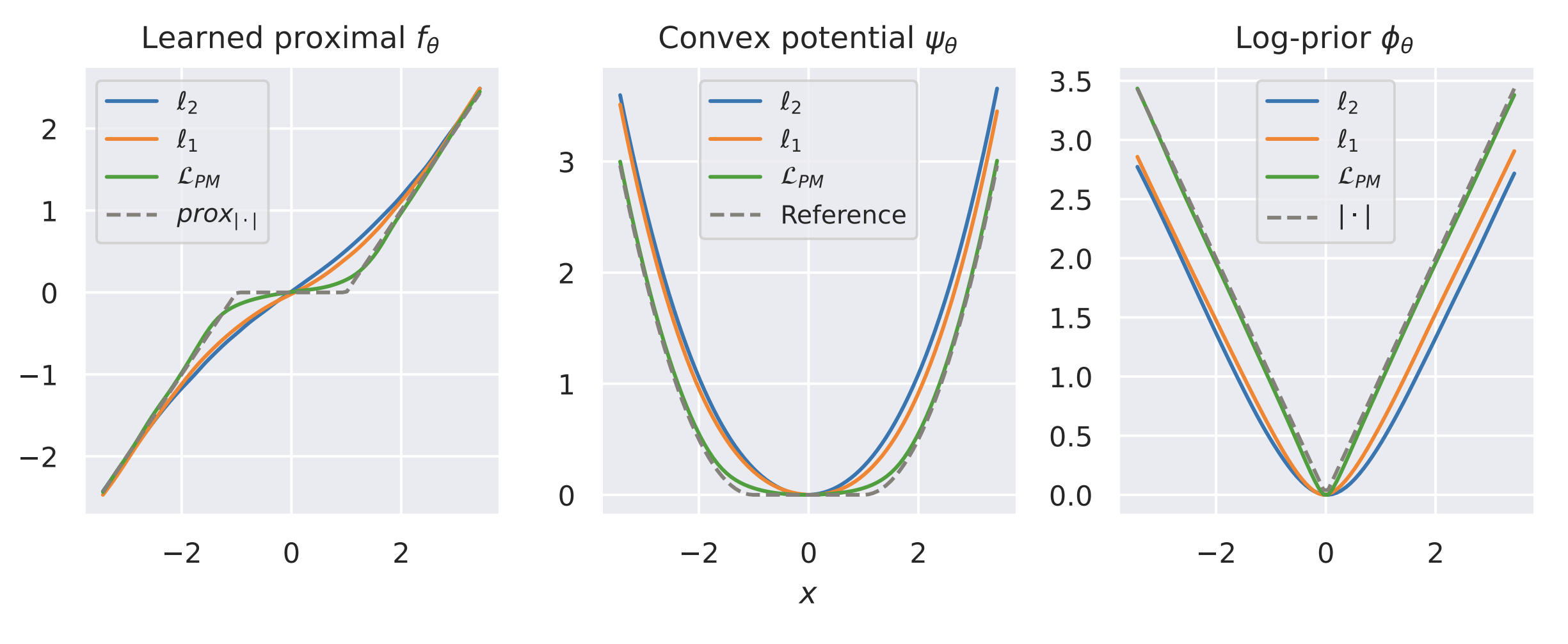
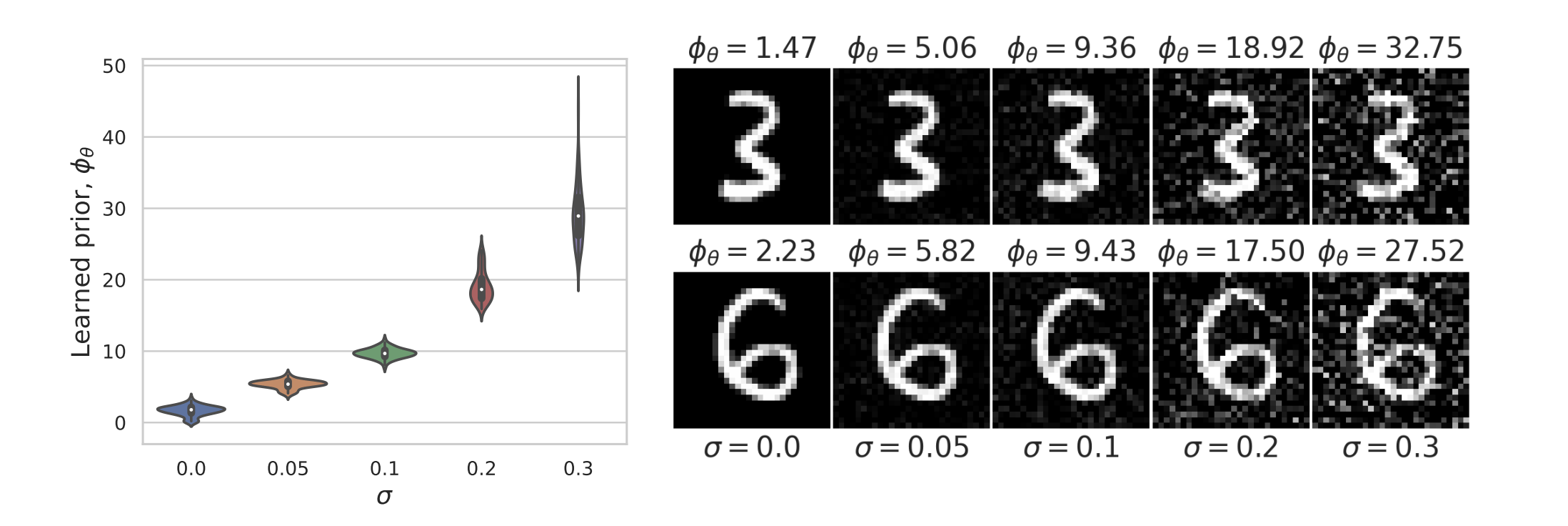
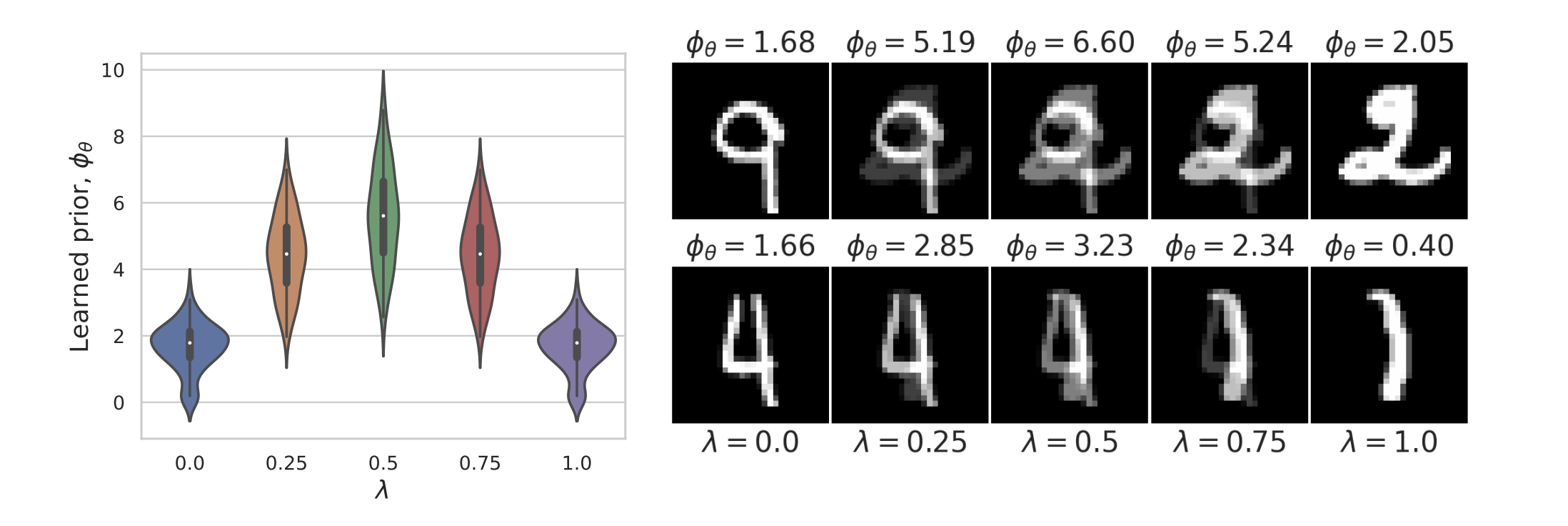
Learned Proximal Networks
Learned Proximal Networks
\(R(\tilde{x})\)
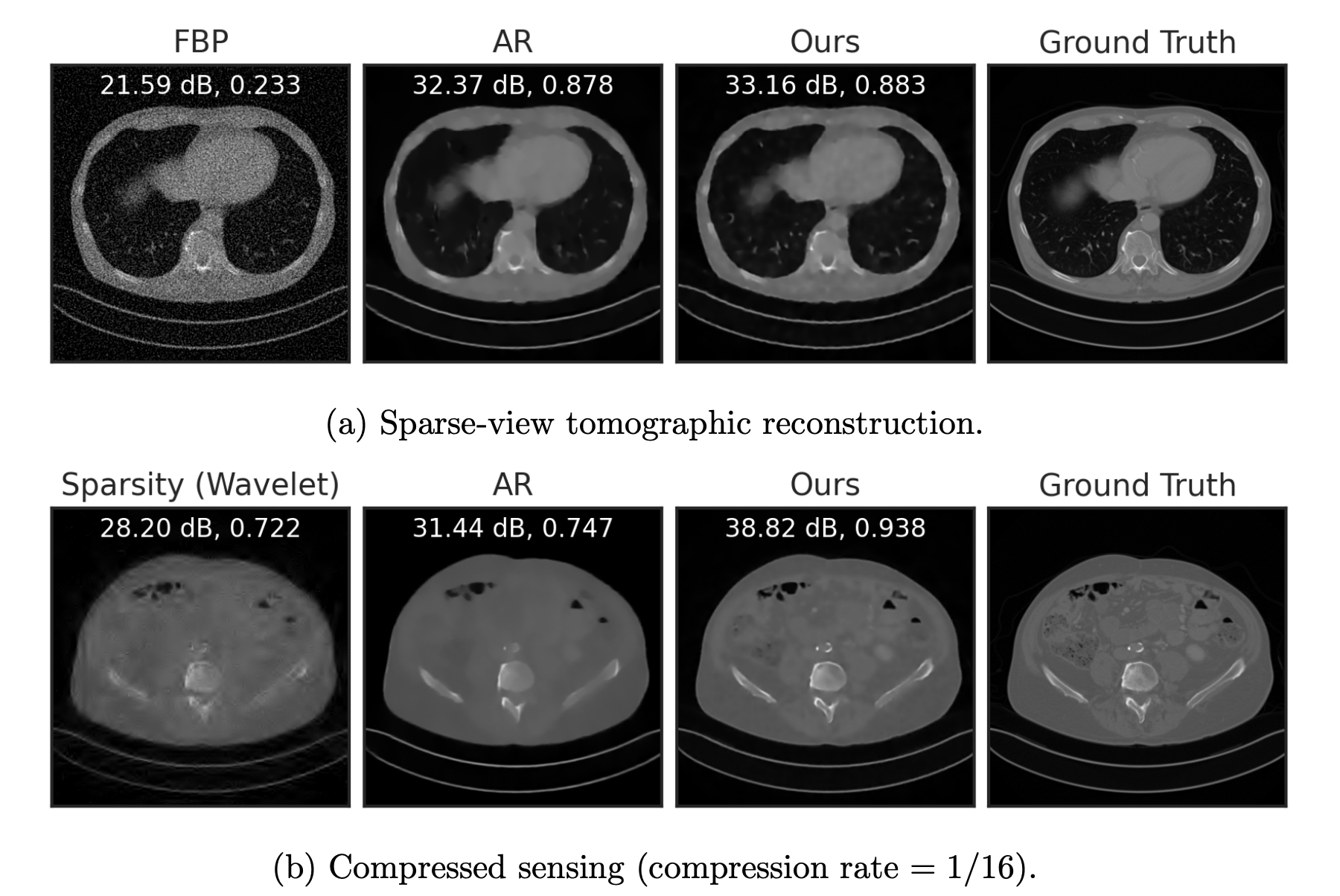
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + \hat{R}(x)
Learned Proximal Networks
Convergence guarantees for PnP
x^{t+1} = f_\theta \left(x^t - \eta A^T(Ax^t - y)\right)
- [Sreehari et al., 2016; Sun et al., 2019; Chan, 2019; Teodoro et al., 2019]
Convergence of PnP for non-expansive denoisers. -
[Ryu et al, 2019]
Convergence for close to contractive operators - [Xu et al, 2020]
Convergence of Plug-and-Play priors with MMSE denoisers -
[Hurault et al., 2022]
Lipschitz-bounded denoisers
Theorem (PGD with Learned Proximal Networks)
x^{t+1} = \text{prox}_{\hat R} \left(x^t - \eta A^T(Ax^t - y)\right)
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + \hat{R}(x)
Let \(f_\theta = \text{prox}_{\hat{R}} {\color{grey}\text{ with } \alpha>0}, \text{ and } 0<\eta<1/\sigma_{\max}(A) \) with smooth activations
\text{Then } \exists x^* : \lim_{k\to\infty} x^t = x^* \text{ and }
f_\theta(x^* - \eta A^T(Ax^*-y)) = x^*
(Analogous results hold for ADMM)
Learned Proximal Networks
Convergence guarantees for PnP
Fang, Buchanan & S. What's in a Prior? Learned Proximal Networks for Inverse Problems. ICLR 2024.
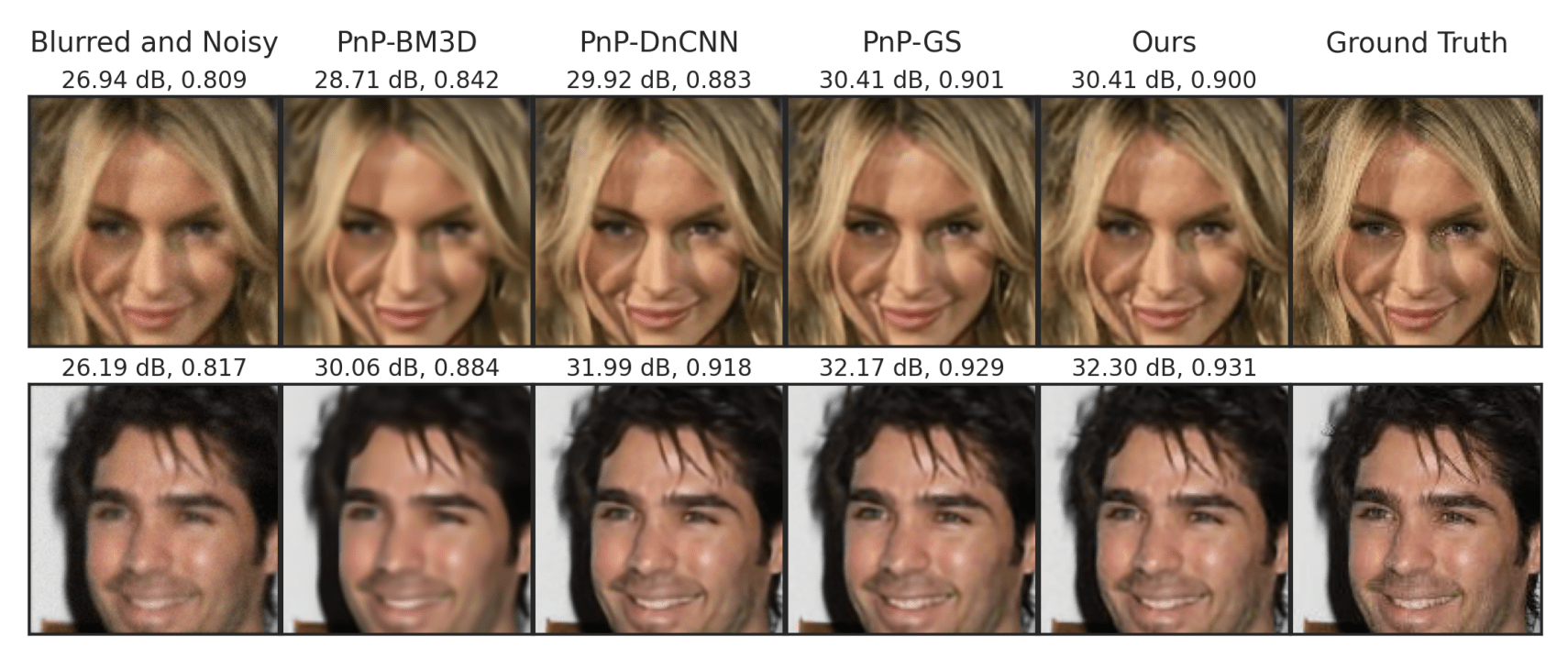
Learned Proximal Networks
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + \hat{R}(x)
Convergence guarantees!
What did my model learn?
PART I
Inverse Problems
PART II
Image Classification

{f}\huge(
{\huge)} = \text{\texttt{sick}}
What parts of the image are important for this prediction?
What are the subsets of the input so that
{f}(x_C) \approx {f}(x) ?
C \subseteq [d]

Interpretability in Image Classification
-
Sensitivity or Gradient-based perturbations
-
Shapley coefficients
-
Variational formulations
-
Counterfactual & causal explanations
LIME [Ribeiro et al, '16], CAM [Zhou et al, '16], Grad-CAM [Selvaraju et al, '17]
Shap [Lundberg & Lee, '17], ...
RDE [Macdonald et al, '19], ...
[Sani et al, 2020] [Singla et al '19],..

Post-hoc Interpretability in Image Classification
efficiency
nullity
symmetry
exponential complexity
Lloyd S Shapley. A value for n-person games. Contributions to the Theory of Games, 2(28):307–317, 1953.
Let be an -person cooperative game with characteristic function
G = ([n],f)
n
f : \mathcal P([n]) \mapsto \mathbb R
How important is each player for the outcome of the game?
\displaystyle \phi_i = \sum_{S_j\subseteq [n]\setminus \{i\} } w_{S_j} \left[ f(S_j\cup \{i\}) - f(S_j) \right]
marginal contribution of player i with coalition S
Shapley values
\displaystyle \phi_i = \sum_{S_j\subseteq [n]\setminus \{i\}} w_j ~ \mathbb ~~ \left[ f(\tilde X_{S_j\cup \{i\}}) - f(\tilde X_{S_j}) \right]
Shap-Explanations
X \in \mathcal X \subset \mathbb R^n
Y\in \mathcal Y = \{0,1\}
inputs
responses
f:\mathcal X \to \mathcal Y
predictor
How important is feature \(x_i\) for \(f(x)\)?
x_{S_j}
\tilde{X}_{S_j}:
X_{S_j^c}
\(X_{S_j^c}\sim \mathcal D_{X_{S_j}={x_{S_j}}}\)
Scott Lundberg and Su-In Lee. A Unified Approach to Interpreting Model Predictions, NeurIPS , 2017
\displaystyle \phi_i = \sum_{S_j\subseteq [n]\setminus \{i\}} w_j ~ \mathbb E \left[ f(\tilde X_{S_j\cup \{i\}}) - f(\tilde X_{S_j}) \right]
Shap-Explanations
X \in \mathcal X \subset \mathbb R^n
Y\in \mathcal Y = \{0,1\}
inputs
responses
How important is feature \(x_i\) for \(f(x)\)?
x_{S_j}
\tilde{X}_{S_j}:
X_{S_j^c}
f:\mathcal X \to \mathcal Y
predictor
\(X_{S_j^c}\sim \mathcal D_{X_{S_j}={x_{S_j}}}\)
Scott Lundberg and Su-In Lee. A Unified Approach to Interpreting Model Predictions, NeurIPS , 2017
Shap-Explanations
Question 1)
Can we resolve the computational bottleneck (and when) ?
Question 2)
What do these coefficients mean, really?
Question 3)
How to go beyond input-features explanations?
We focus on data with certain structure:
f\huge(
{\huge)} = 0
{f}\huge(
{\huge)} = 1
{f}\huge(
{\huge)} = 0
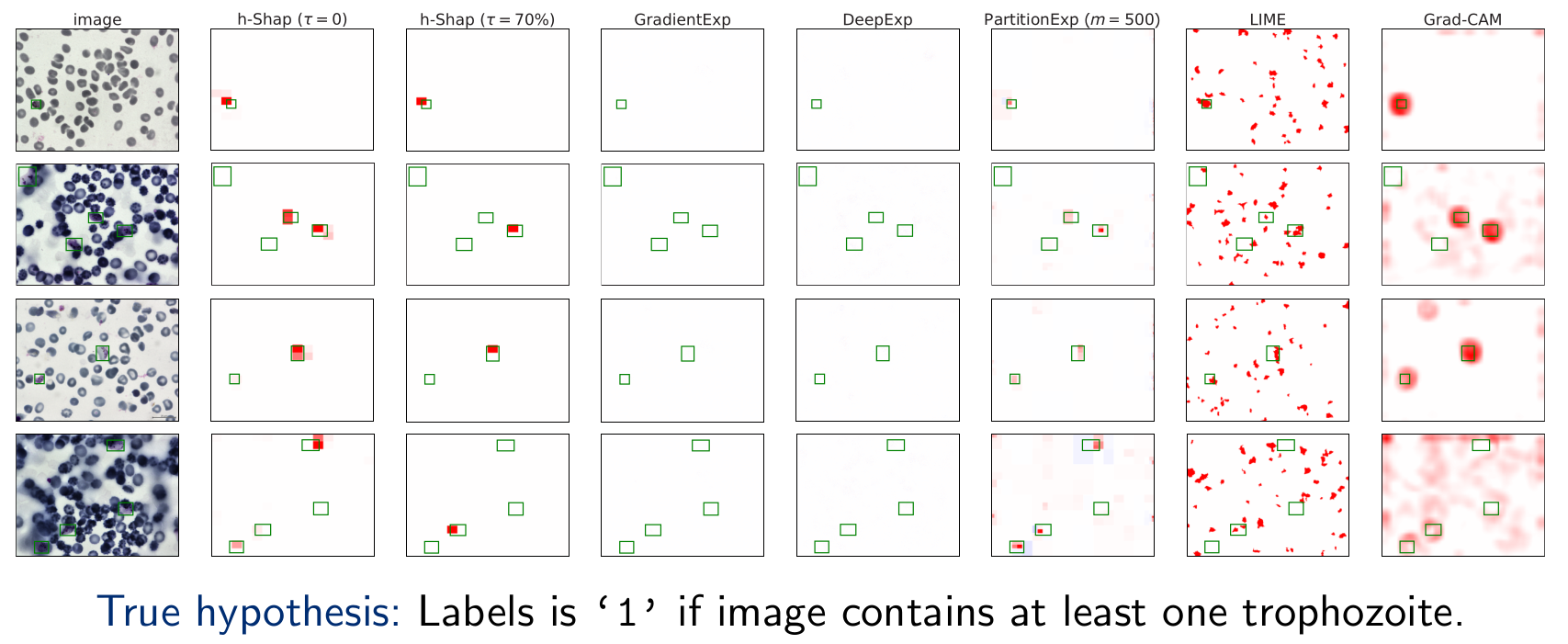
Example:
f(x) = 1
if contains a sick cell
x
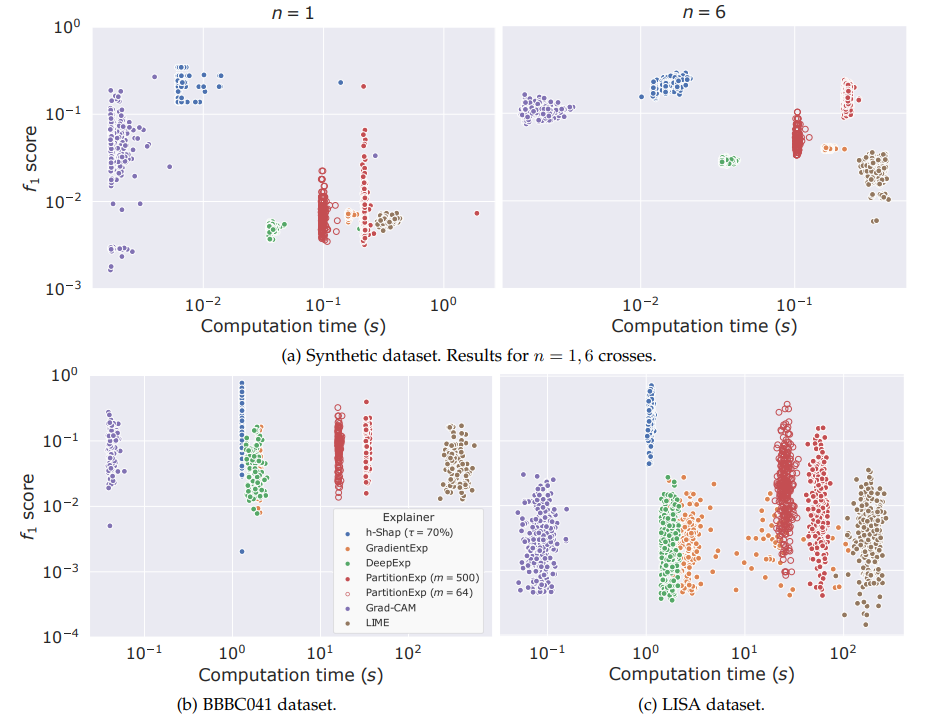
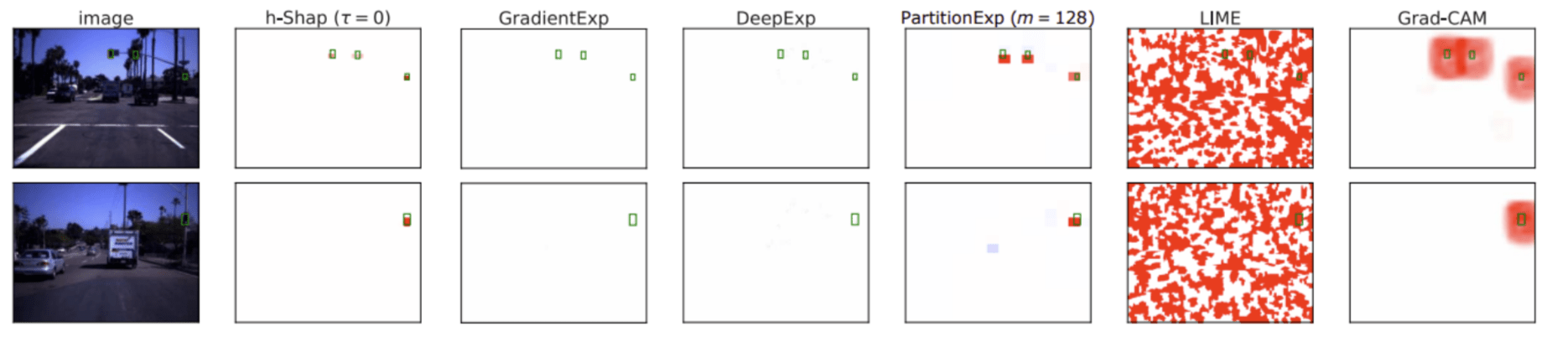
Hierarchical Shap (h-Shap)
\text{\textbf{Assumption 1:}}~ f(x) = 1 \Leftrightarrow \exist~ i: f(\tilde X_i) = 1
Question 1) Can we resolve the computational bottleneck (and when) ?
Theorem (informal)
-
hierarchical Shap runs in linear time
-
Under A1, h-Shap \(\to\) Shapley
\mathcal O(2^\gamma k \log n)
[Teneggi, Luster & S., IEEE TPAMI, 2022]
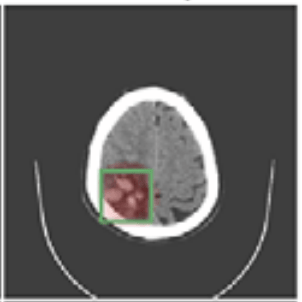
We focus on data with certain structure:
Hierarchical Shap (h-Shap)
\text{\textbf{Assumption 1:}}~ f(x) = 1 \Leftrightarrow \exist~ i: f(\tilde X_i) = 1
Question 1) Can we resolve the computational bottleneck (and when) ?
Theorem (informal)
-
h-Shap runs in linear time
-
Under A1, h-Shap \(\to\) Shapley
\mathcal O(2^\gamma k \log n)
Fast hierarchical games for image explanations, Teneggi, Luster & S., IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022

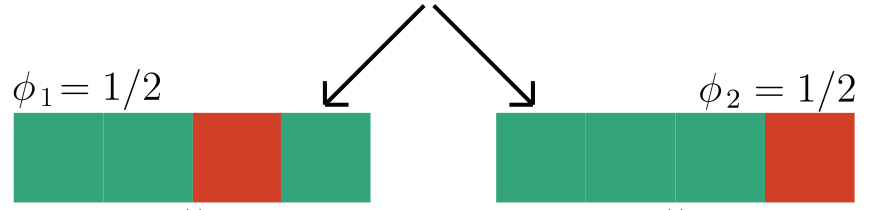
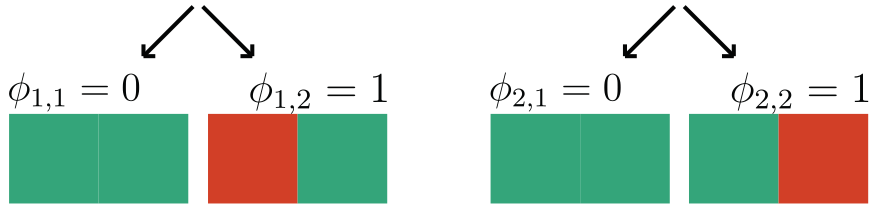
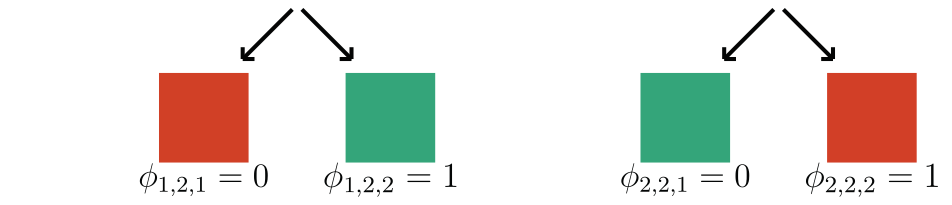
\gamma = 2
We focus on data with certain structure:
\text{\textbf{Assumption 1:}}~ f(x) = 1 \Leftrightarrow \exist~ i: f(\tilde X_i) = 1
Theorem (informal)
-
h-Shap runs in linear time
-
Under A1, h-Shap \(\to\) Shapley
\mathcal O(2^\gamma k \log n)
Hierarchical Shap (h-Shap)
Hierarchical Shap (h-Shap)
Fast hierarchical games for image explanations, Teneggi, Luster & Sulam, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022
Hierarchical Shap (h-Shap)
Question 2) What do these coefficients mean, really?
Precise notions of importance
Formal Feature Importance
H_{0,S}:~ X_S \perp\!\!\!\perp Y | X_{[n]\setminus S}
[Candes et al, 2018]
Question 2) What do these coefficients mean, really?
Precise notions of importance

XRT: eXplanation Randomization Test
returns a \(\hat{p}_{i,S}\) for the test above
\text{reject} ~\Rightarrow~ i=2 \text{: important}
H^0_{i=2,S=\{1,3,4\}}
i=1
i=2
i=3
i=4
How do we test?
\text{For any } S \subseteq [n]\setminus \{{\color{Red}i}\}, \text{ and a sample } x\sim \mathcal p_X
H^0_{{\color{red}i},S}:~ (f(\tilde X_{S\cup \{{\color{red}i}\}}) ) \overset{d}{=} (f(\tilde X_{S}) )
Local Feature Importance
Precise notions of importance
Local Feature Importance
\text{For any } S \subseteq [n]\setminus \{{\color{Red}i}\}, \text{ and a sample } x\sim \mathcal D_X
H^0_{{\color{red}i},S}:~ (f(\tilde X_{S\cup \{{\color{red}i}\}}) ) \overset{d}{=} (f(\tilde X_{S}) )
\gamma_{i,S}

\displaystyle \phi_{\color{red}i}(x) = \sum_{S\subseteq [n]\setminus \{{\color{red}i}\}} w_{S} ~ \mathbb E \left[ f(\tilde X_{S\cup \{{\color{red}i}\}}) - f(\tilde X_S) \right]
Given the Shapley coefficient of any feature
Then
p_{i,S}
and the (expected) p-value obtained for , i.e. ,
H^0_{i,S}
Theorem:
p_{i,S} \leq 1 - \gamma_{i,S}.
i\in[n],
Teneggi, Bharti, Romano, and S. "SHAP-XRT: The Shapley Value Meets Conditional Independence Testing." TMLR (2023).
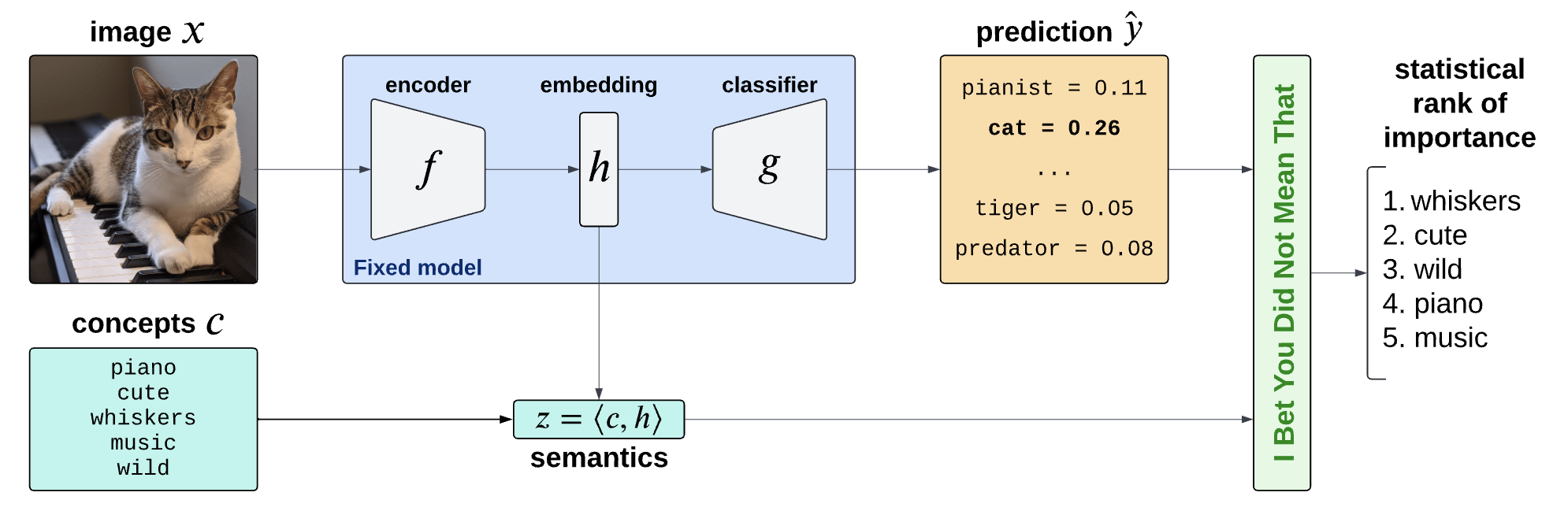
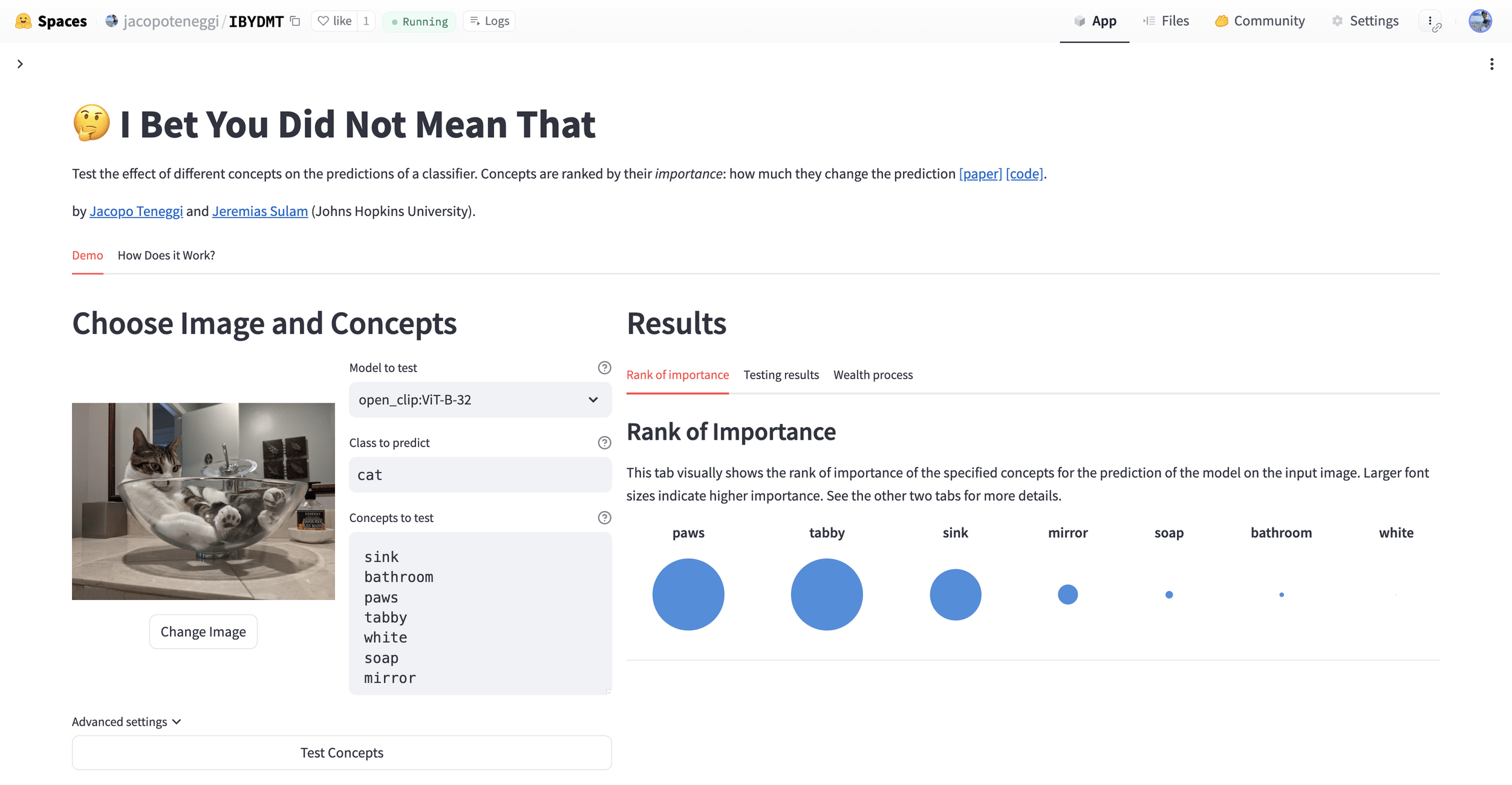
Question 3)
How to go beyond input-features explanations?
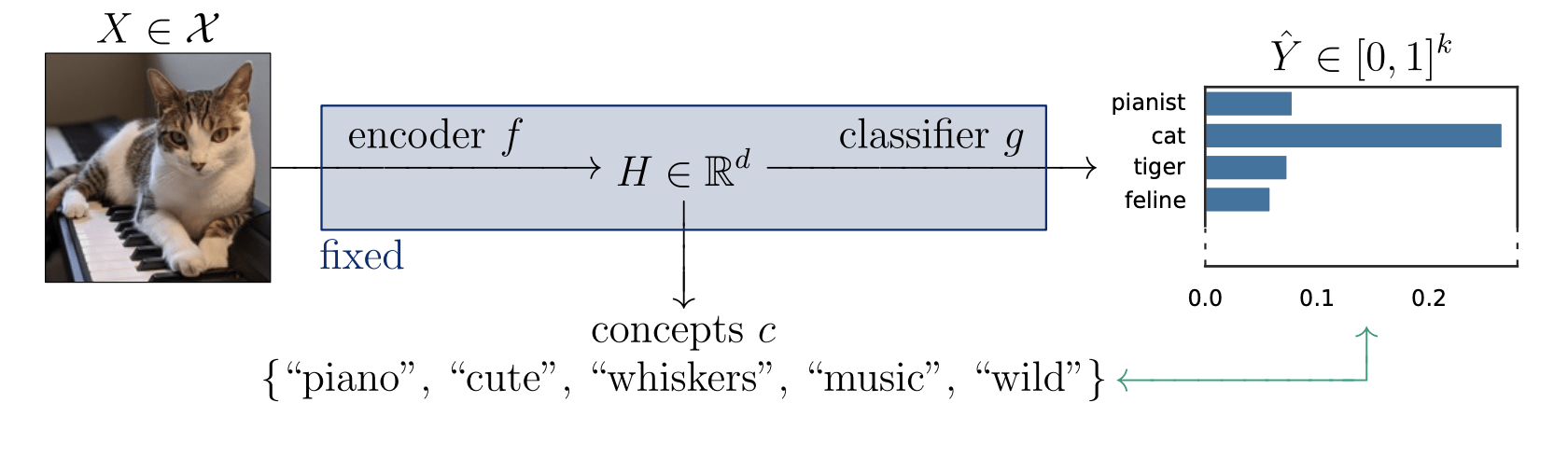
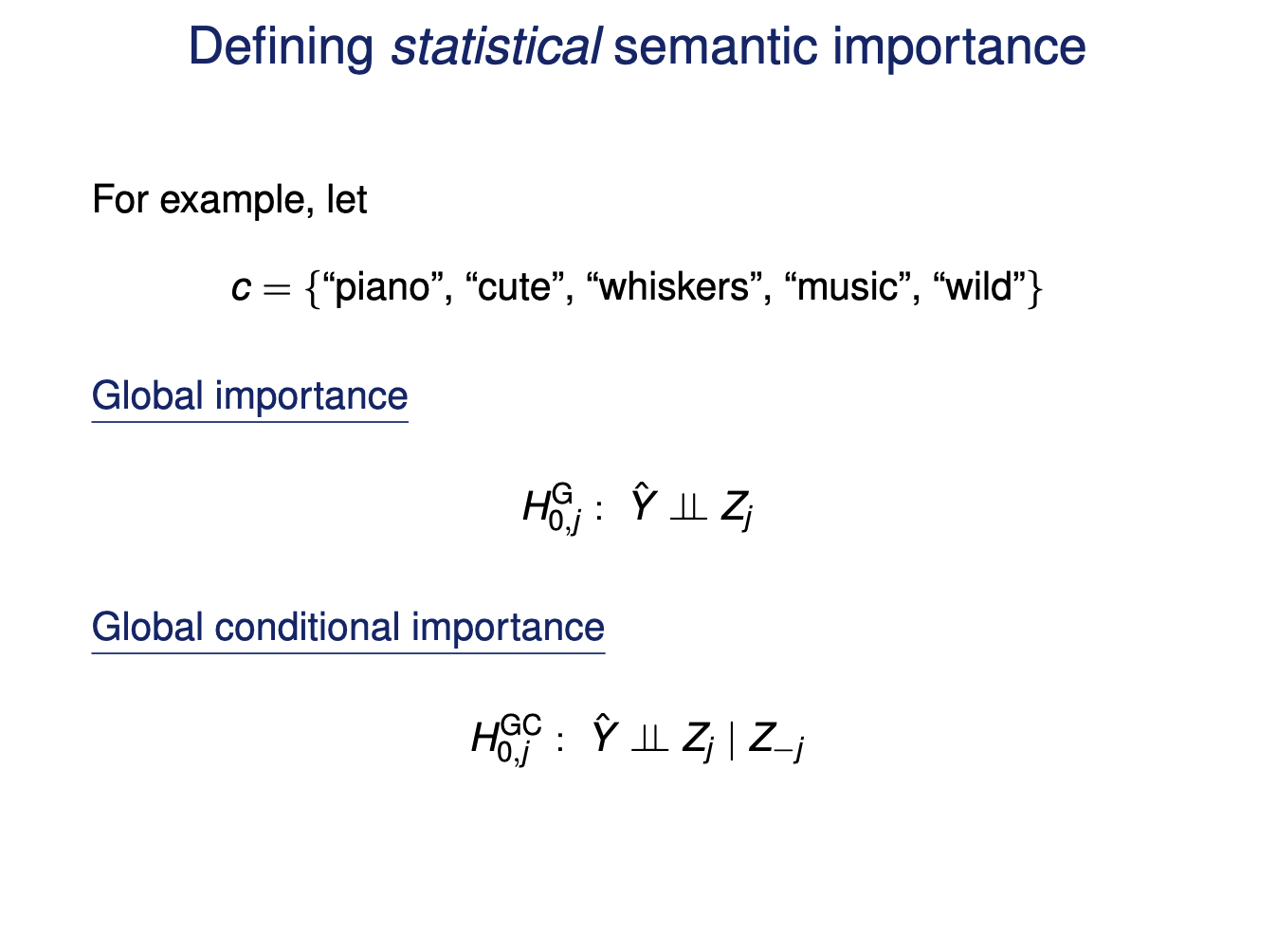
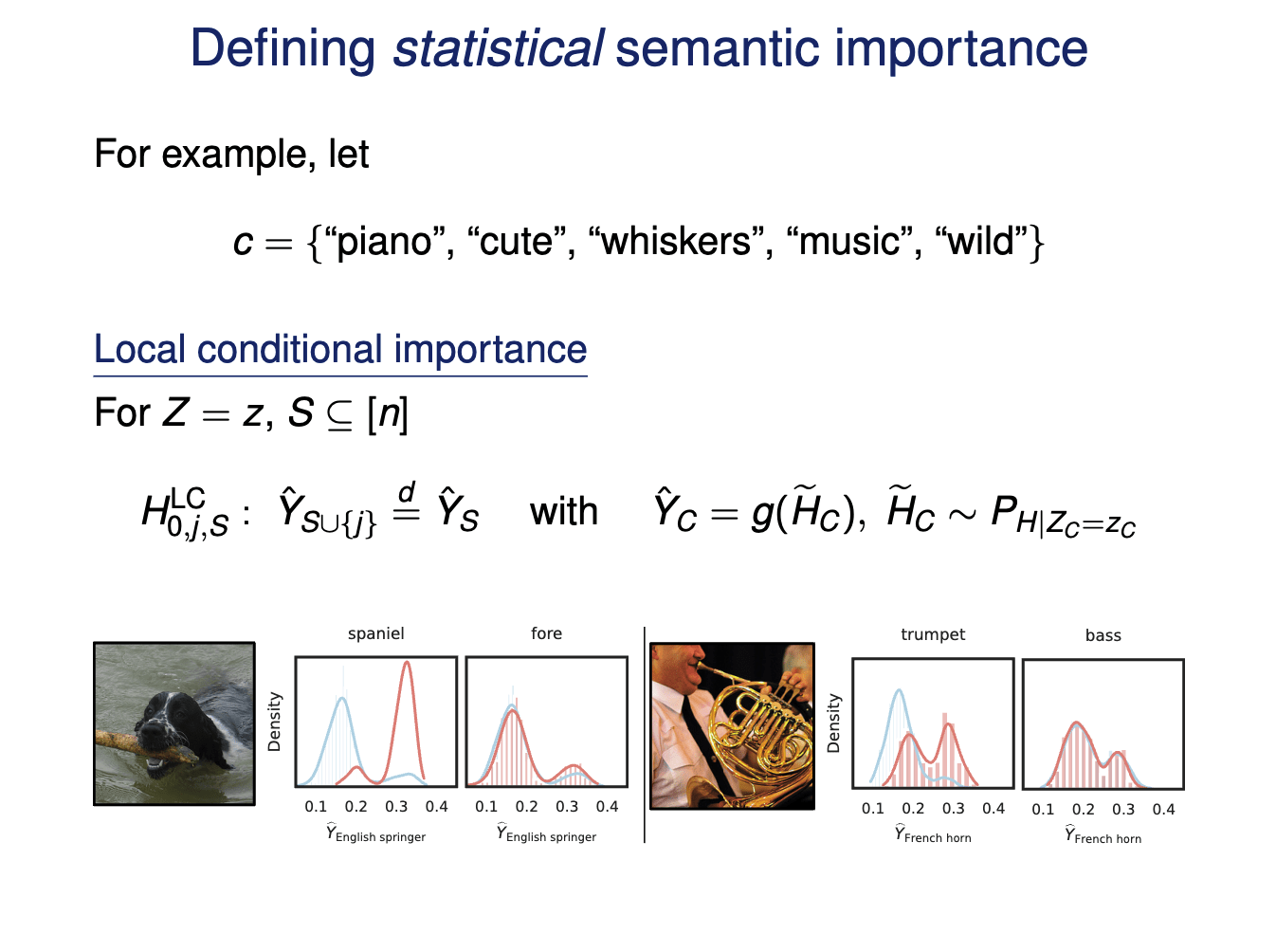
Is the piano important for \(\hat Y = \text{cat}\) given that there is a cute mammal?
Testing Semantic Importance
Question 3) How to go beyond input-features explanations?
Precise notions of semantic importance
\(\tilde{Y} = w^TZ\)
Concept Bottleneck Models (CBM)
[Koh et al '20, Yang et al '23, Yuan et al '22 ]
embeddings \(h = f(x)\)
Precise notions of semantic importance
\(\tilde{Y} = w^TZ\)
Concept Bottleneck Models (CBM)
[Koh et al '20, Yang et al '23, Yuan et al '22 ]
embeddings \(h = f(x)\)
Precise notions of semantic importance
semantics \(Z = c^TH\)
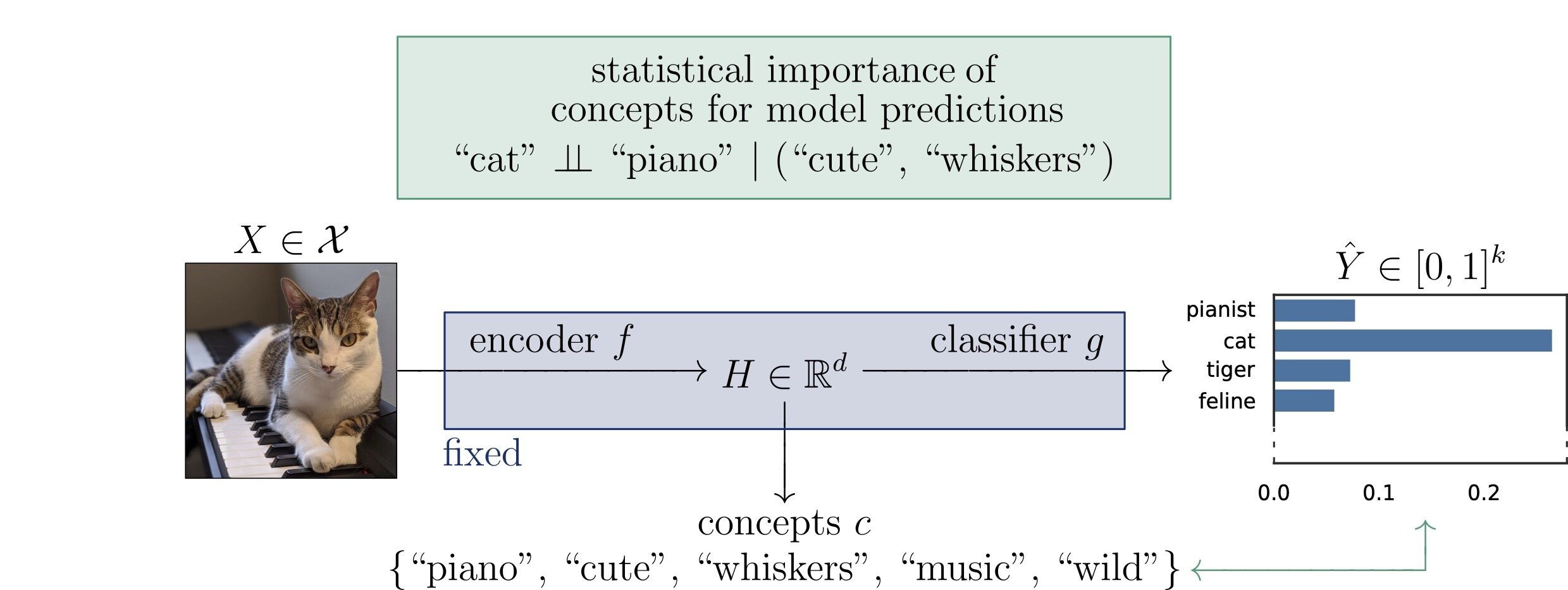
embeddings \(H = f(X)\)
predictions \(\hat{Y} = g(H)\)
Concept Bottleneck Models (CBM)
[Koh et al '20, Yang et al '23, Yuan et al '22, Yuksekgonul '22 ]
Precise notions of semantic importance
semantics \(Z = c^TH\)
\(\tilde{Y} = w^TZ\)
Concept Bottleneck Models (CBM)
[Koh et al '20, Yang et al '23, Yuan et al '22, Yuksekgonul '22 ]
embeddings \(H = f(X)\)
predictions \(\hat{Y} = g(H)\)
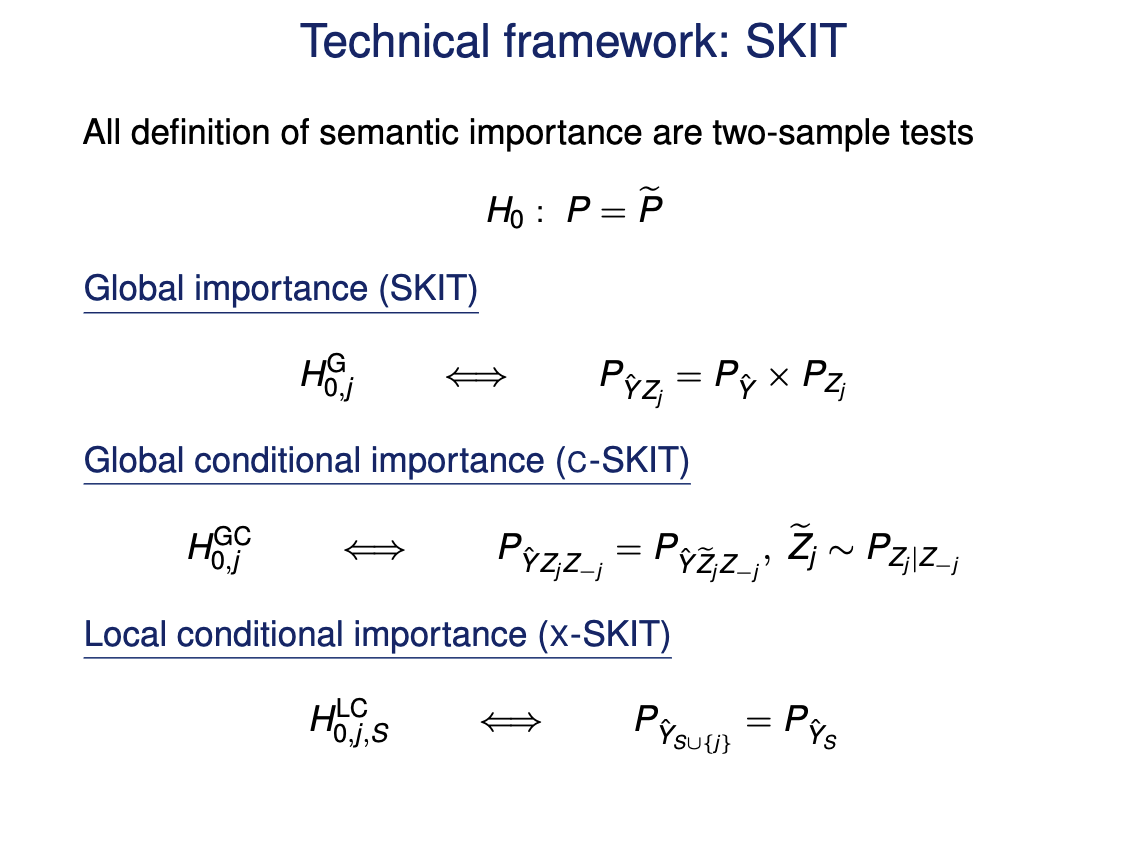
Precise notions of semantic importance
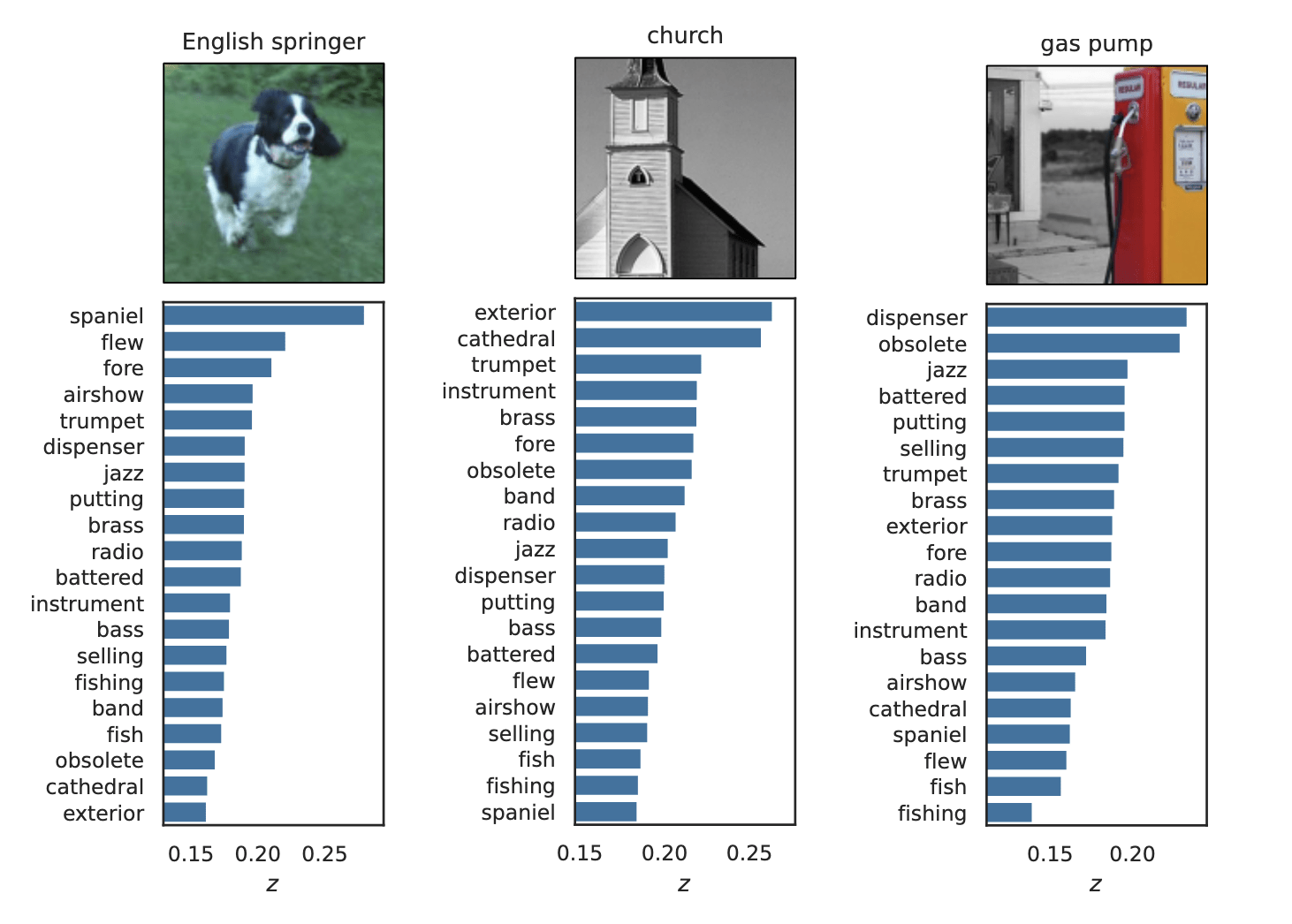
semantic XRT
\[H^{j,S}_0:~g(\widetilde{H}_{S \cup \{j\}}) \overset{d}{=} g(\widetilde{H}_S),\quad\widetilde{H}_C \sim P_{H | Z_C = z_C}\]
"The classifier (its distribution) does not change if we condition
on concepts \(S\) vs on concepts \(S\cup\{j\} \)"
semantics \(Z = c^TH\)
embeddings \(H = f(X)\)
predictions \(\hat{Y} = g(H)\)
Precise notions of semantic importance
semantic XRT
\[H^{j,S}_0:~g(\widetilde{H}_{S \cup \{j\}}) \overset{d}{=} g(\widetilde{H}_S),\quad\widetilde{H}_C \sim P_{H | Z_C = z_C}\]
"The classifier (its distribution) does not change if we condition
on concepts \(S\) vs on concepts \(S\cup\{j\} \)"
\(\hat{Y}_\text{gas pump}\)
\(Z_S\cup Z_{j}\)
\(Z_{S}\)
Precise notions of semantic importance
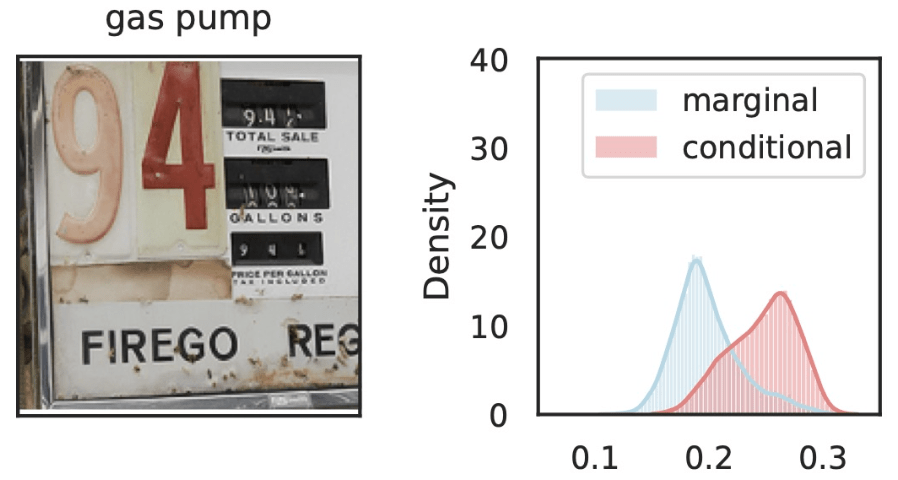
semantic XRT
\[H^{j,S}_0:~g(\widetilde{H}_{S \cup \{j\}}) \overset{d}{=} g(\widetilde{H}_S),\quad\widetilde{H}_C \sim P_{H | Z_C = z_C}\]
"The classifier (its distribution) does not change if we condition
on concepts \(S\) vs on concepts \(S\cup\{j\} \)"

\(\hat{Y}_\text{gas pump}\)
\(\hat{Y}_\text{gas pump}\)
\(Z_S\cup Z_{j}\)
\(Z_{S}\)
\(Z_S\cup Z_{j}\)
\(Z_{S}\)
Precise notions of semantic importance
semantic XRT
\[H^{j,S}_0:~g(\widetilde{H}_{S \cup \{j\}}) \overset{d}{=} g(\widetilde{H}_S),\quad\widetilde{H}_C \sim P_{H | Z_C = z_C}\]
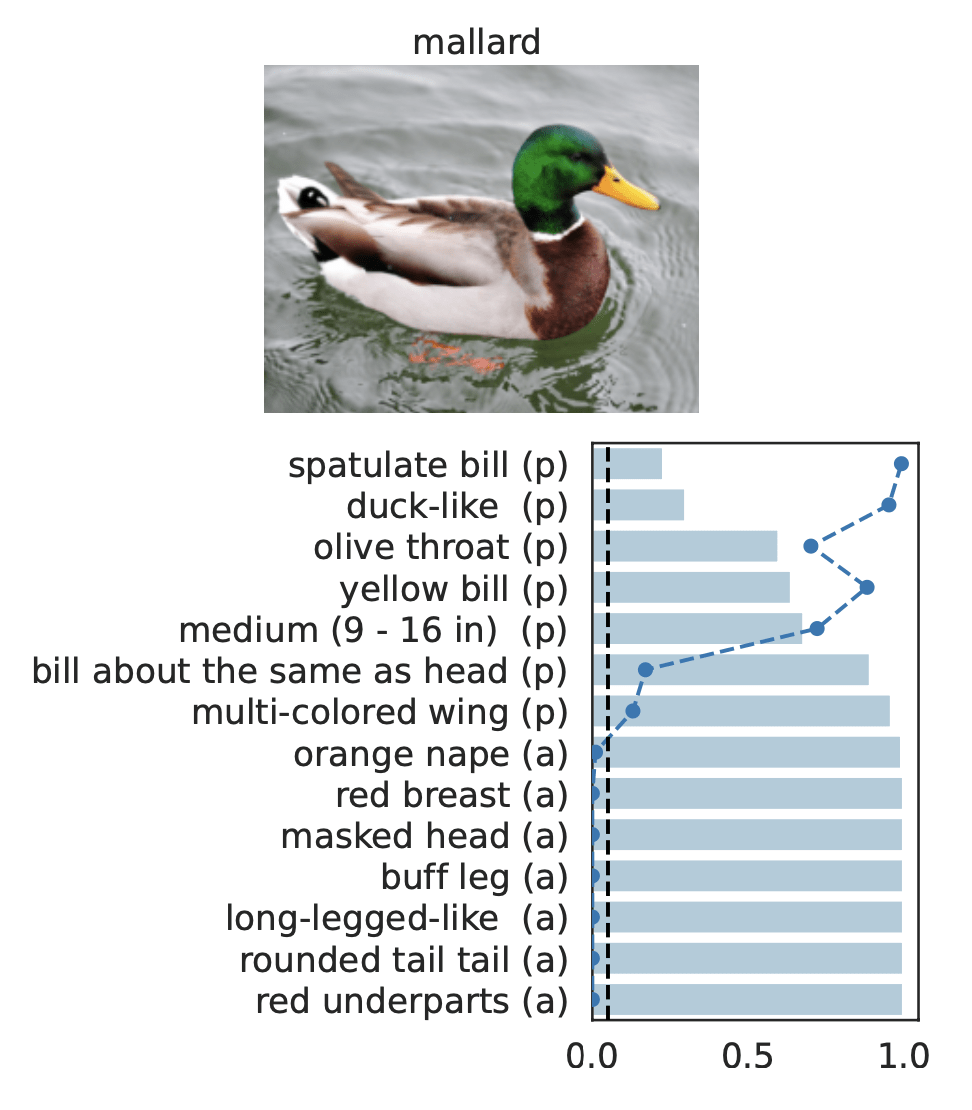
Testing by Betting
- Instantiate a wealth process
\(K_0 = 1\)
\(K_t = K_{t-1}(1+\kappa_t v_t)\)
- Reject \(H_0\) when \(K_t \geq 1/\alpha\)
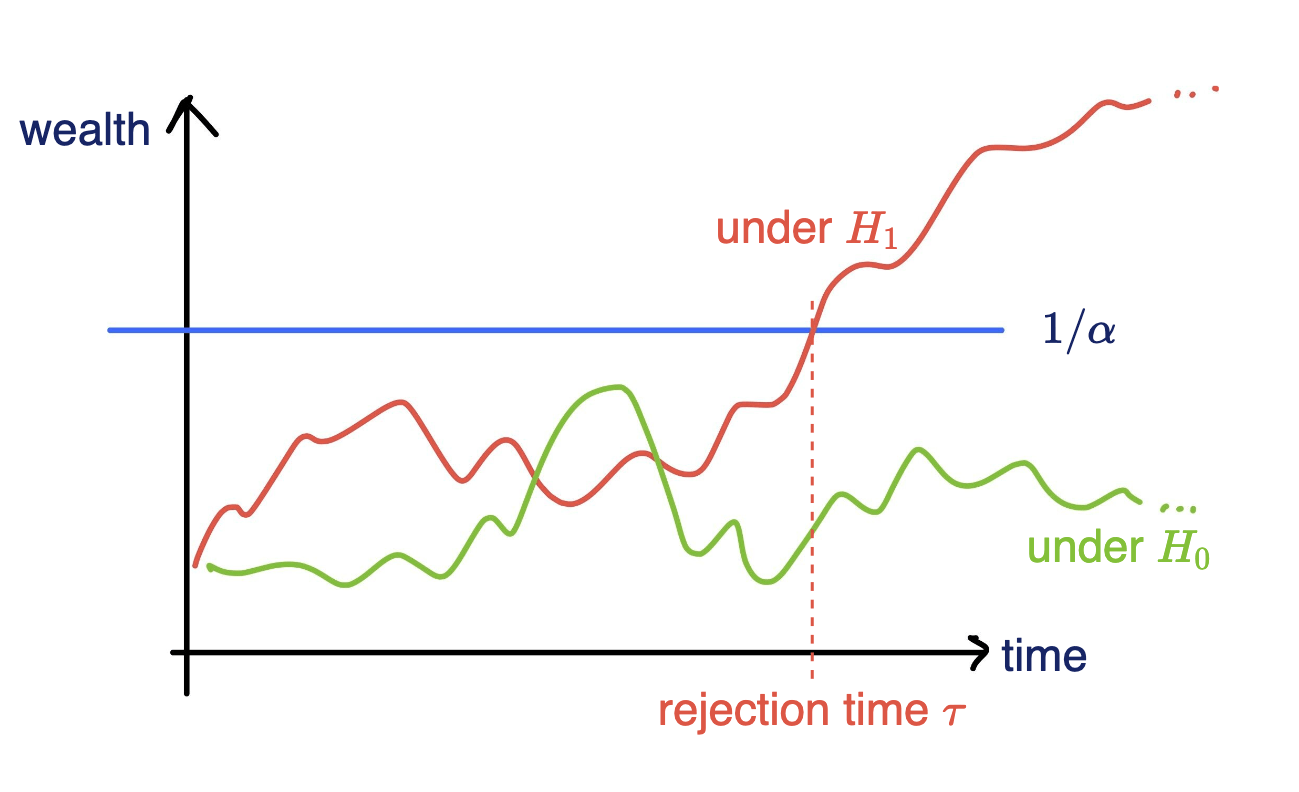
[Shaer et al. 2023, Shekhar and Ramdas 2023 ]
rejection time
rejection rate
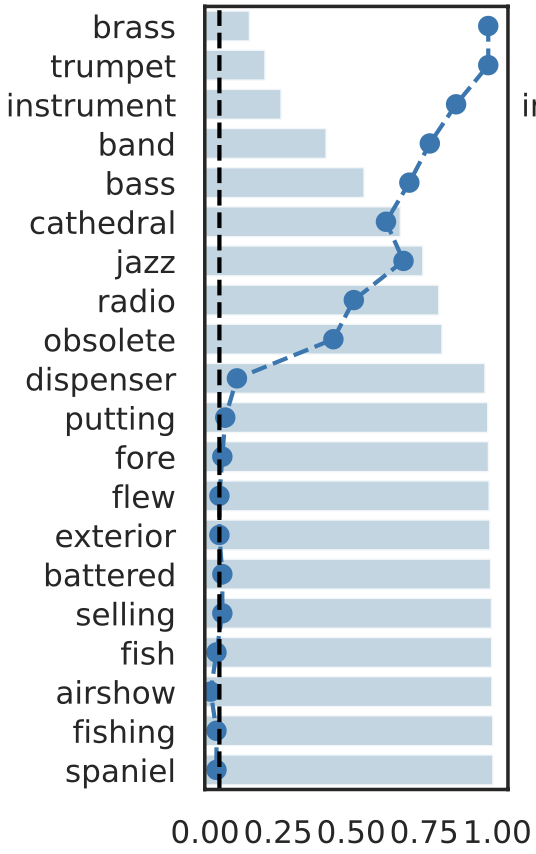
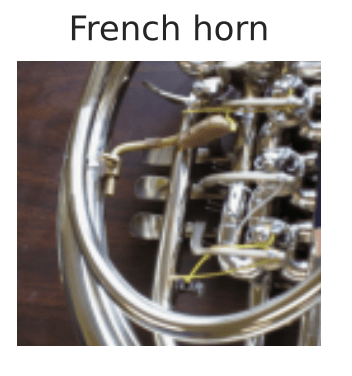
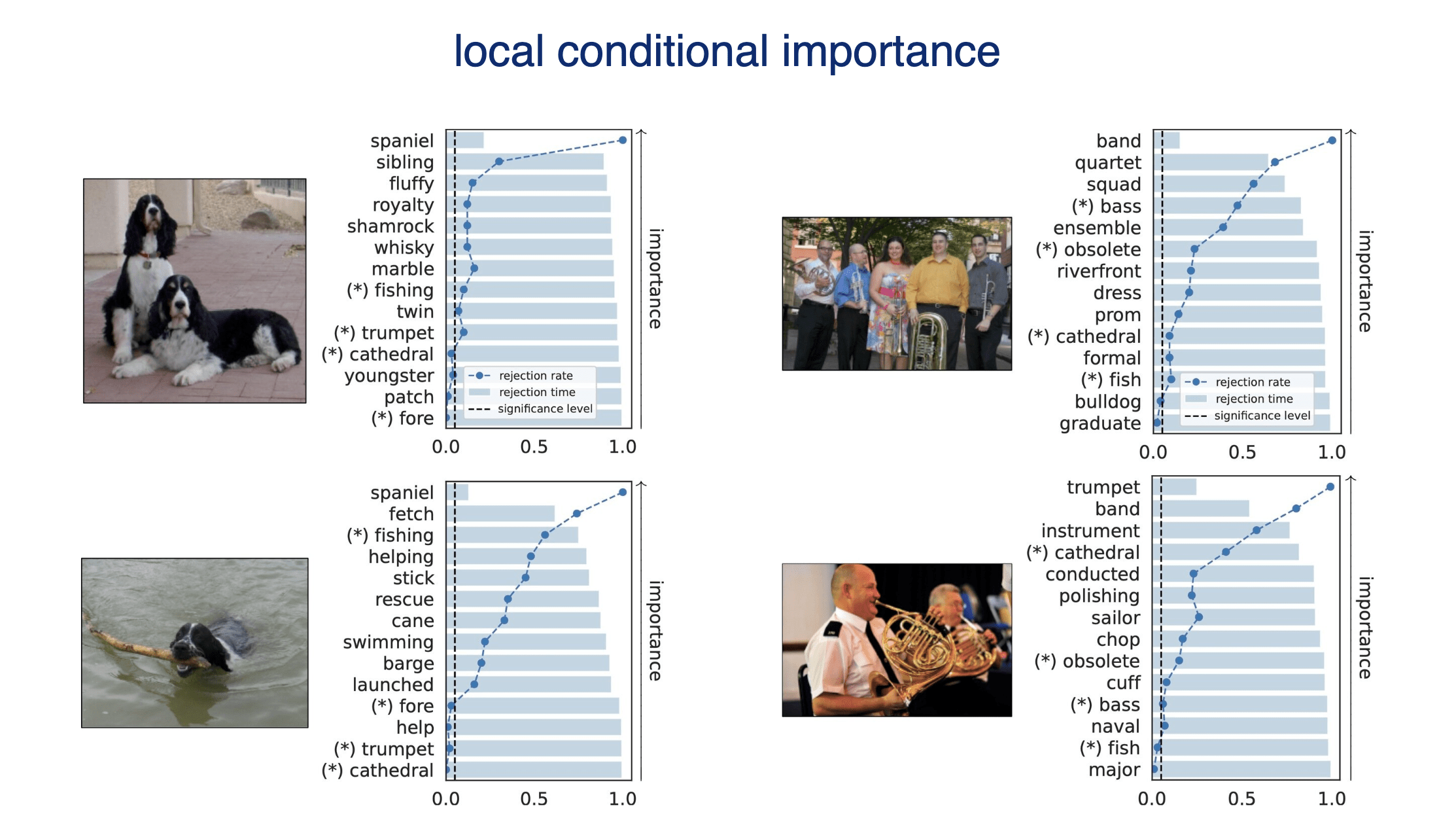
Important Semantic Concepts
(Reject \(H_0\))
Unimportant Semantic Concepts
(fail to reject \(H_0\))
Precise notions of semantic importance
Precise notions of semantic importance
Important Semantic Concepts
(Reject \(H_0\))
Unimportant Semantic Concepts
(fail to reject \(H_0\))
- Type 1 error control
- False discovery rate control
rejection rate
rejection time
Precise notions of semantic importance
-
Exciting open problems to making AI tools safe, trustworthy and interpretable
-
Importance in clear definitions and guarantees
Concluding Remarks
-
Exciting open problems to making AI tools safe, trustworthy and interpretable
-
Importance in clear definitions and guarantees
Concluding Remarks
* Fang, Z., Buchanan, S., & J.S. (2023). What's in a Prior? Learned Proximal Networks for Inverse Problems. International Conference on Learning Representations. * Teneggi, J., Luster, A., & J.S. (2022). Fast hierarchical games for image explanations. IEEE Transactions on Pattern Analysis and Machine Intelligence. * Teneggi, J., B. Bharti, Y. Romano, and J.S. (2023) SHAP-XRT: The Shapley Value Meets Conditional Independence Testing. Transactions on Machine Learning Research. * Teneggi, J. and J.S. I Bet You Did Not Mean That: Testing Semantic Importance via Betting. NeurIPS 2024 (to appear).

...that's it!






Zhenghan Fang
JHU
Jacopo Teneggi
JHU
Beepul Bharti
JHU
Sam Buchanan
TTIC
Yaniv Romano
Technion
Appendix
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + \hat{R}(x)
Learned Proximal Networks
Convergence guarantees for PnP
x^{t+1} = f_\theta \left(x^t - \eta A^T(Ax^t - y)\right)
- [Sreehari et al., 2016; Sun et al., 2019; Chan, 2019; Teodoro et al., 2019]
Convergence of PnP for non-expansive denoisers. -
[Ryu et al, 2019]
Convergence for close to contractive operators - [Xu et al, 2020]
Convergence of Plug-and-Play priors with MMSE denoisers -
[Hurault et al., 2022]
Lipschitz-bounded denoisers
Theorem (PGD with Learned Proximal Networks)
x^{t+1} = \text{prox}_{\hat R} \left(x^t - \eta A^T(Ax^t - y)\right)
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + \hat{R}(x)
Let \(f_\theta = \text{prox}_{\hat{R}} {\color{grey}\text{ with } \alpha>0}, \text{ and } 0<\eta<1/\sigma_{\max}(A) \) with smooth activations
\text{Then } \exists x^* : \lim_{k\to\infty} x^t = x^* \text{ and }
f_\theta(x^* - \eta A^T(Ax^*-y)) = x^*
(Analogous results hold for ADMM)
Learned Proximal Networks
Convergence guarantees for PnP
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + \hat{R}(x)
Learned Proximal Networks
Convergence guarantees for PnP
x^{t+1} = f_\theta \left(x^t - \eta A^T(Ax^t - y)\right)
- [Sreehari et al., 2016; Sun et al., 2019; Chan, 2019; Teodoro et al., 2019]
Convergence of PnP for non-expansive denoisers. -
[Ryu et al, 2019]
Convergence for close-to-contractive operators - [Xu et al, 2020]
Convergence of Plug-and-Play priors with MMSE denoisers -
[Hurault et al., 2022]
Lipschitz-bounded denoisers
Theorem (PGD with Learned Proximal Networks)
x^{t+1} = \text{prox}_{\hat R} \left(x^t - \eta A^T(Ax^t - y)\right)
\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + \hat{R}(x)
Let \(f_\theta = \text{prox}_{\hat{R}} {\color{grey}\text{ with } \alpha>0}, \text{ and } 0<\eta<1/\sigma_{\max}(A) \) with smooth activations
\text{Then } \exists x^* : \lim_{k\to\infty} x^t = x^* \text{ and }
f_\theta(x^* - \eta A^T(Ax^*-y)) = x^*
(Analogous results hold for ADMM)
Learned Proximal Networks
Convergence guarantees for PnP
f \approx \mathbb E[Y|X=x]
X \in \mathcal X \subset \mathbb R^n
Y\in \mathcal Y = \{0,1\}
inputs
responses
f:\mathcal X \to \mathcal Y
\text{For any}~ S \subset [n],~ \text{and a sample } { x} \newline
\text{ define }\tilde{X}_S = [{x_S},X_{S^c}], \text{ where } X_{S^c}\sim \mathcal D_{X_S={x_S}}
predictor
Shap-Explanations
x_S
x:
x_{S^c}
f \approx \mathbb E[Y|X=x]
X \in \mathcal X \subset \mathbb R^n
Y\in \mathcal Y = \{0,1\}
inputs
responses
f:\mathcal X \to \mathcal Y
\text{For any}~ S \subset [n],~ \text{and a sample } { x} \newline
\text{ define }\tilde{X}_S = [{x_S},X_{S^c}], \text{ where } X_{S^c}\sim \mathcal D_{X_S={x_S}}
predictor
Shap-Explanations
x_S
x:
x_{S^c}
\tilde{X}_S:
Shap-Explanations
x_S
x

\tilde{X}_S
f \approx \mathbb E[Y|X=x]
X \in \mathcal X \subset \mathbb R^n
Y\in \mathcal Y = \{0,1\}
inputs
responses
f:\mathcal X \to \mathcal Y
\text{For any}~ S \subset [n],~ \text{and a sample } { x} \newline
\text{ define }\tilde{X}_S = [{x_S},X_{S^c}], \text{ where } X_{S^c}\sim \mathcal D_{X_S={x_S}}
predictor
\displaystyle \phi_i = \sum_{S_j\subseteq [n]\setminus \{i\}} w_j ~ \mathbb E \left[ f(\tilde X_{S_j\cup \{i\}}) - f(\tilde X_{S_j}) \right]
Scott Lundberg and Su-In Lee. A Unified Approach to Interpreting Model Predictions, NeurIPS , 2017
efficiency
nullity
symmetry
exponential complexity
Shap-Explanations
f \approx \mathbb E[Y|X=x]
X \in \mathcal X \subset \mathbb R^n
Y\in \mathcal Y = \{0,1\}
inputs
responses
f:\mathcal X \to \mathcal Y
\text{For any}~ S \subset [n],~ \text{and a sample } { x} \newline
\text{ define }\tilde{X}_S = [{x_S},X_{S^c}], \text{ where } X_{S^c}\sim \mathcal D_{X_S={x_S}}
predictor
\gamma = 2
We focus on data with certain structure:
\text{\textbf{Assumption 1:}}~ f^*(x) = 1 \Leftrightarrow \exist~ i: f^*(\tilde X_i) = 1
Theorem (informal)
-
h-Shap runs in linear time
-
Under A1, h-Shap \(\to\) Shapley
\mathcal O(2^\gamma k \log n)
Hierarchical Shap (h-Shap)
Hierarchical Shap (h-Shap)
Teneggi, Luster & S. Fast hierarchical games for image explanations, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022Hierarchical Shap (h-Shap)
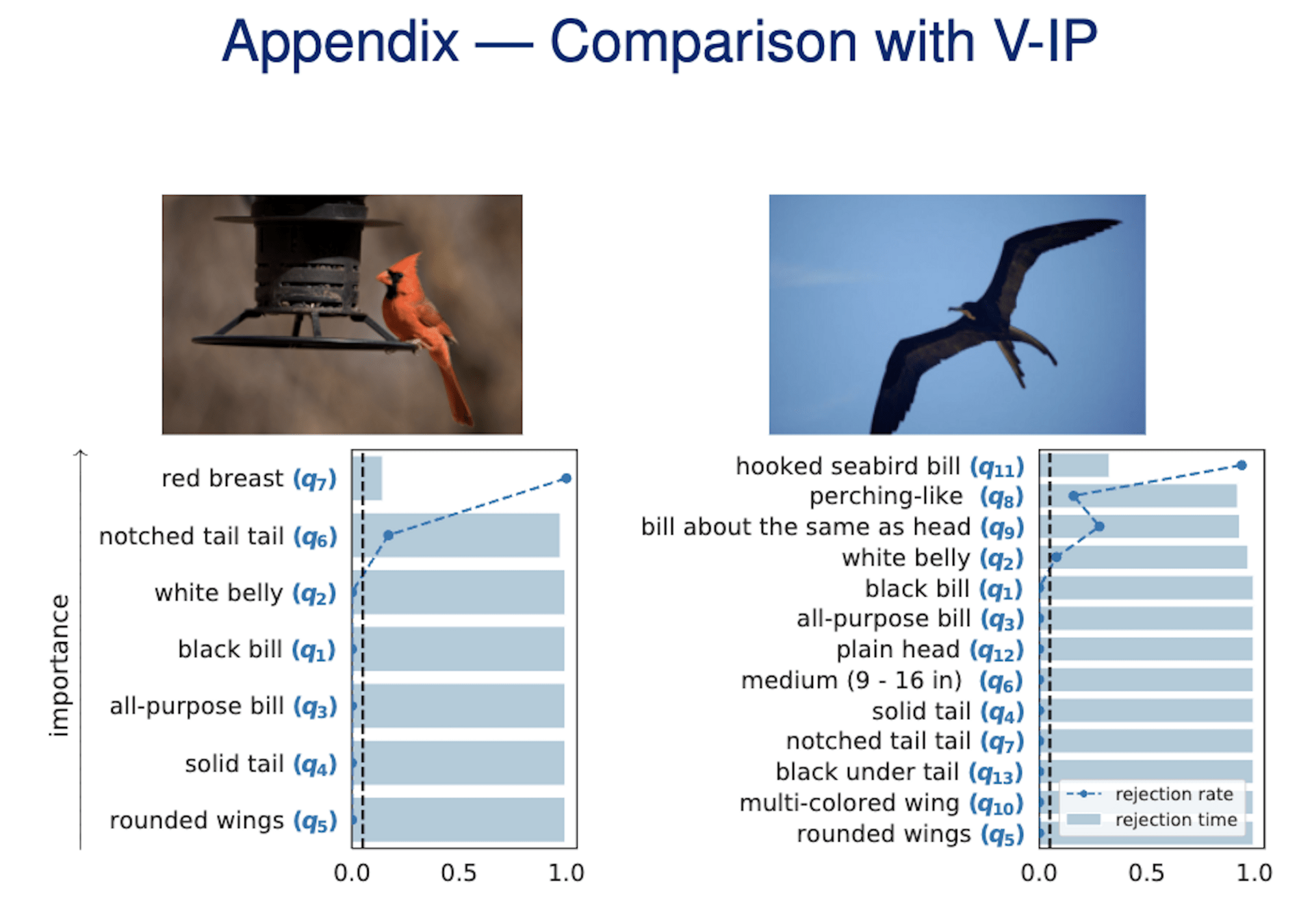
[Chattopadhyay et al, 2024]
What has my model learned? SIMONS
By Jeremias Sulam




