Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Photogrammetrie: Le process
Matthieu Quantin
En 4 étapes:
- Capture
- Points homologues
- Positions relatives / absolues
- Reconstitution 3D
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
1. Capture
capturer des données
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Matériel de base : photographies
La photographie est une technique permettant de fixer une image sur une surface sensible à l’aide de la lumière et des objets qui la reflètent.
→ Large gamme de données de base
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
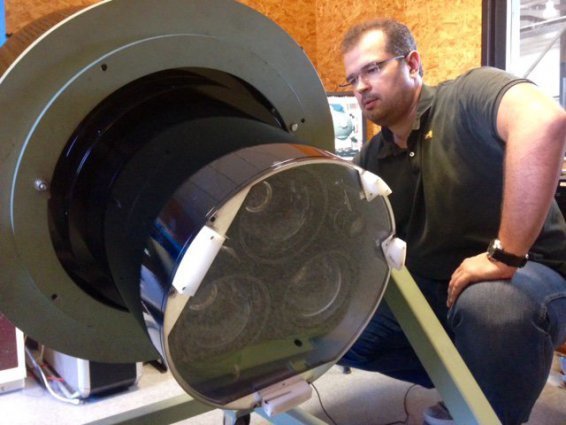
Capteur pour photo aérienne IMAO B66
(faibles parallaxes)
- 18 x 50 Mpixels → 770Mpix
- 1 pixel = 6µm
- à 1000m, 1pixel = 3cm au sol
- 4Gb / file
- 1.8 frame/sec
→ Gagner du temps de vol (cher)
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité

Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Mais pour nous:

Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
2. Détection de zones homologues
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Plusieurs algorithme:
- 1999, SIFT: Scale Invariant Feature Transform
- 2008, SURF: Speeded Up Robust Features
- 2016, autres? (RealityCapture…)
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
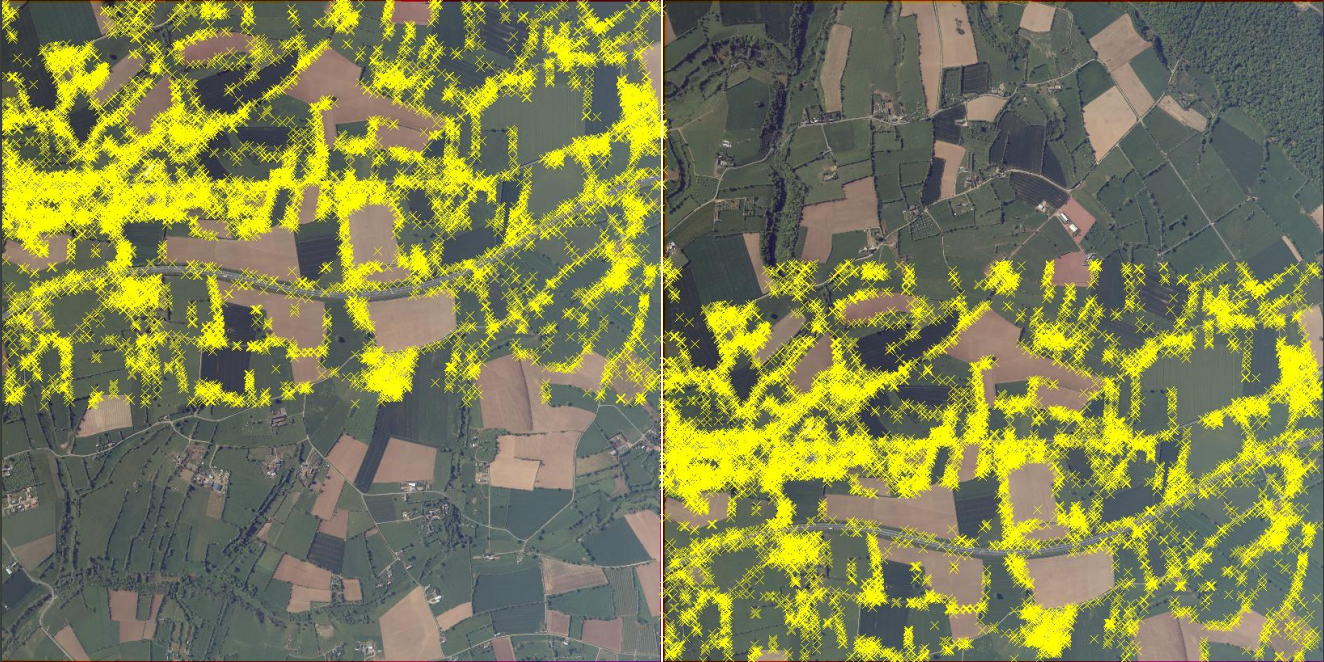
SIFT




Points homologues sur différentes images
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité

Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
SIFT = Scale Invariant Feature Transform
- invariant à l’échelle
- invariant à la rotation
- invariant à l’exposition
→ Basé sur des caractéristiques locales
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
SIFT: algorithme robuste

Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
4 étapes pour SIFT:
- Détecter des zones caractéristiques
- Détecter leur orientation dominante
- Calculer leur descripteur
- Retrouver des zones similaires sur d’autres images
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
2.1. Zones caractéristiques
Descripteurs de Harris (1981)
= analyse locale de l’image à l’ordre 2
Opérateur de dérivation:
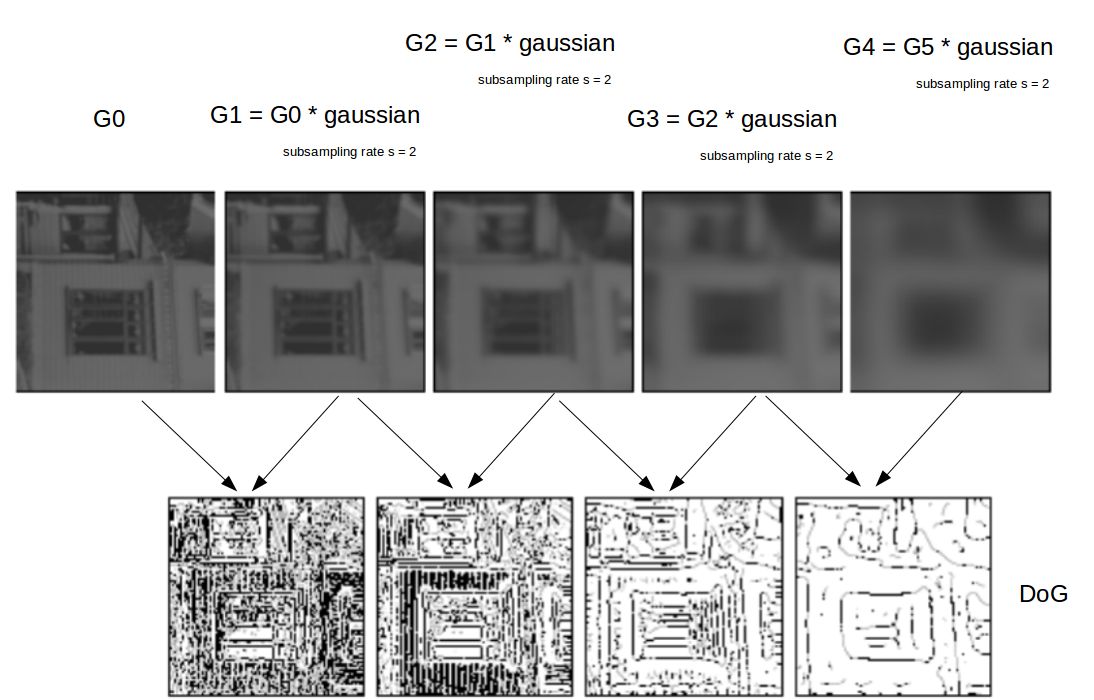
- DoG (Difference of Gaussians)
- LoG (Laplacian of Gaussian)
- DoH (Difference of Hessians)
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
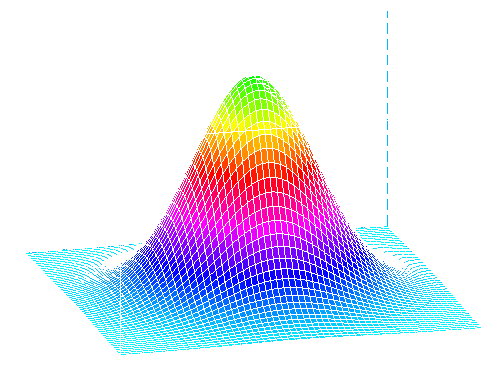
Rappel Gaussienne
G( x , y ) = ( 12 \pi \sigma^2 ) \times e^{-\frac{( x^2 + y^2)}{ 2 \sigma^2} }
par exemple:
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
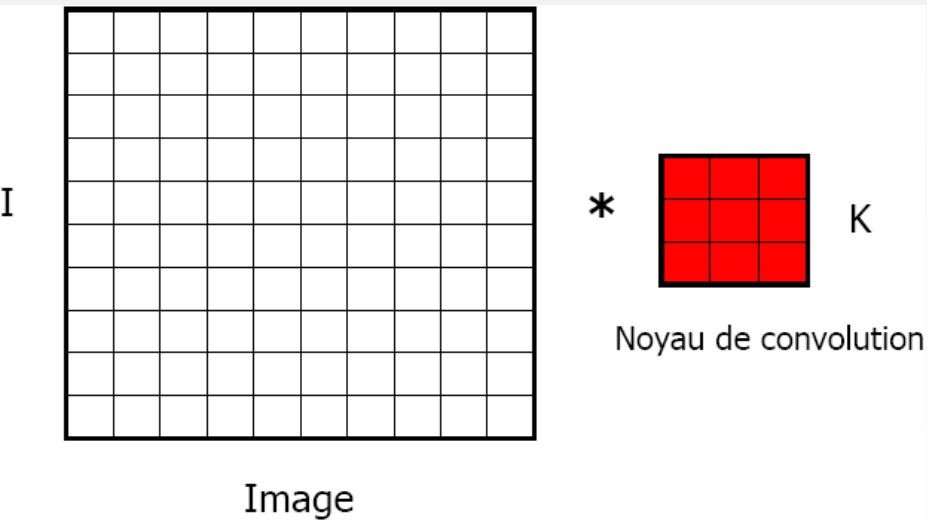
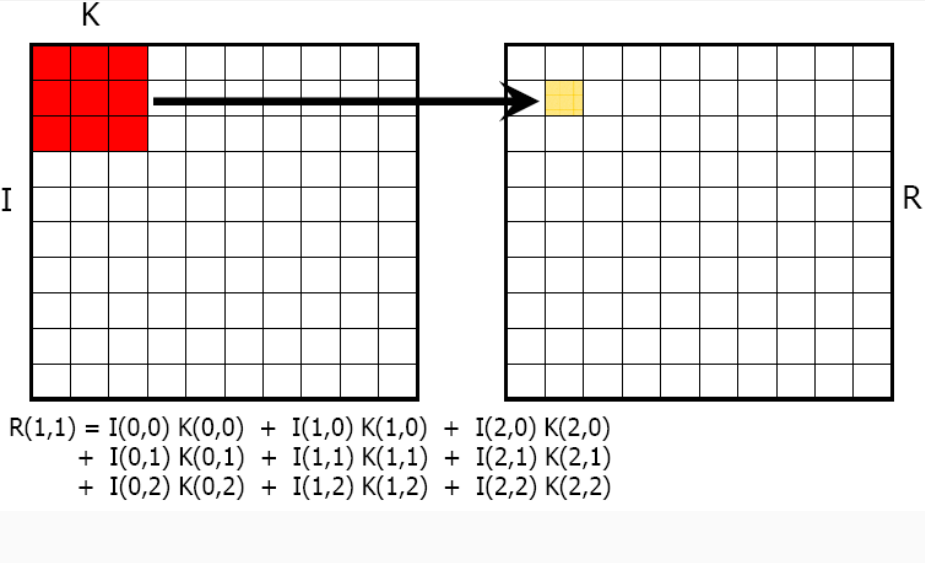
Convolution = “remplacer” chaque pixel par son voisinage x matrice gaussienne
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Exemple de noyau de convolution gaussien
\begin{bmatrix} 1 & 2 & 3 & 2 & 1 \\ 2 & 6 & 8 & 6 & 2 \\ 3 & 8 & 10 & 8 & 3 \\ 2 & 6 & 8 & 6 & 2 \\ 1 & 2 & 3 & 2 & 1 \end{bmatrix} \quad
On y retrouve notre courbe 3D précédente
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Avantage (par rapport à un noyau de convolution "moyenne"):
élimine les détails de haute fréquence
(= le bruit)
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Descripteurs de Lowe (1990)
→passage à l’octave
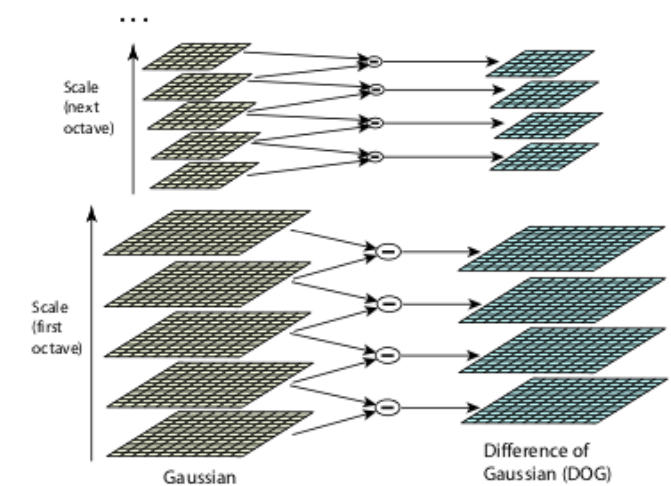
→ parametre de précision
= jusqu'à quel octave descend-on?
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
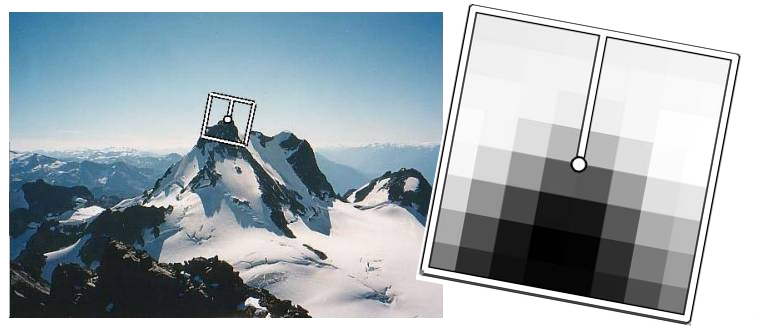
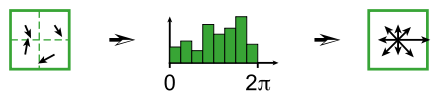
2.2. Orientation
- Histogramme des orientations des gradients des pixels voisins dans Lσ
- Orientation = orientation correspondant au plus haut pic de l’histogramme
- Si plusieurs pics importants, on dédouble le point
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
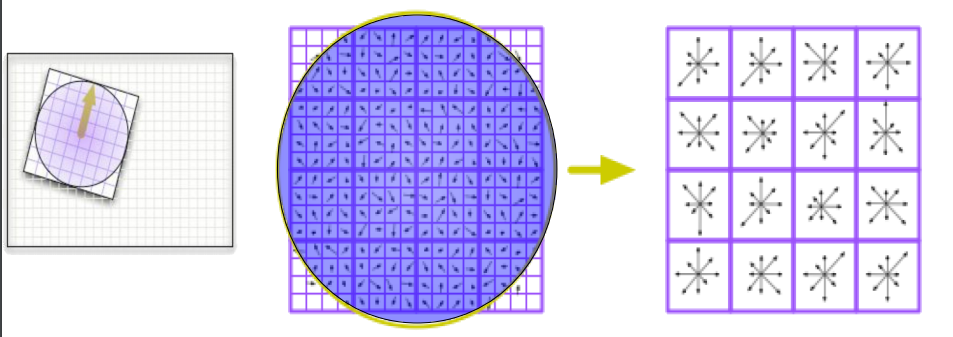
2.3. Descripteur
Caractériser le comportement de l’image au voisinage du point
- orientation des gradients de pixels
- histogramme de ces orientations au voisinage
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
4x4x8 = 128
descripteur du point: vecteur de dimension 128
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
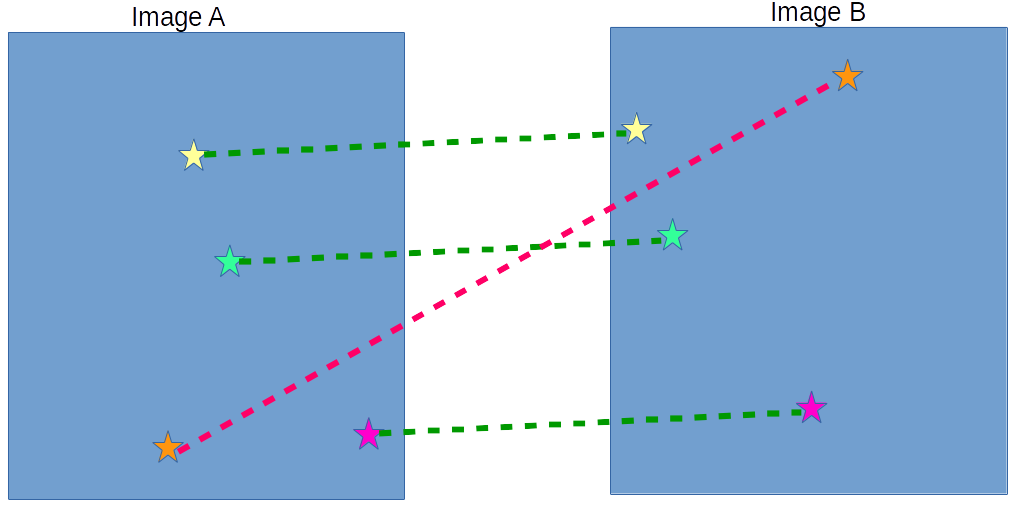
2.4. Matcher chez les autres
- Descripteur identique
- Proches voisins (économique)
- Alignements:
- transformées de Haught
- moindre carrés
- etc…
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Filtrage
On retire:
- les zone à faible contraste
- les arrêtes
- les aberrations
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité

Matthieu QUANTIN 2016
TP photogrammetrie - Phycité

Matthieu QUANTIN 2016
TP photogrammetrie - Phycité

Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Principe de filtrage des abbérations
Matthieu QUANTIN 2016
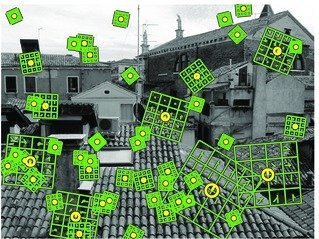
TP photogrammetrie - Phycité
Points détécté par SIFT
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Points concordants

Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
3. Positions absolue des prises de vue
- Concerne un couple stéréoscopique: 2 images avec recouvrement
- À partir des points communs
- ensemble de transformations matricielles
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
3 étapes:
- Orientation relative
- Orientation relative + échelle
- Orientation absolue
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
3.0. Corrections des distortions
- Via les caractéristiques de l’objectif
- Corrélation dense…
Souvent une combinaison des 2.
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
3.1. Orientation relative
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
3.2. Orientation relative + échelle
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
- Cette semaine nous nous arrêterons là.
- Pas de points connus,
- Uniquement des points “connus” sur les autres couples stéréophotgrammetrique.
→ Échelle relative
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
3.3. Orientation absolue

Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
4. Reconstitution 3D
Prenons le cas de ce cube
Je prends des photos
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Différence des Gaussiennes
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
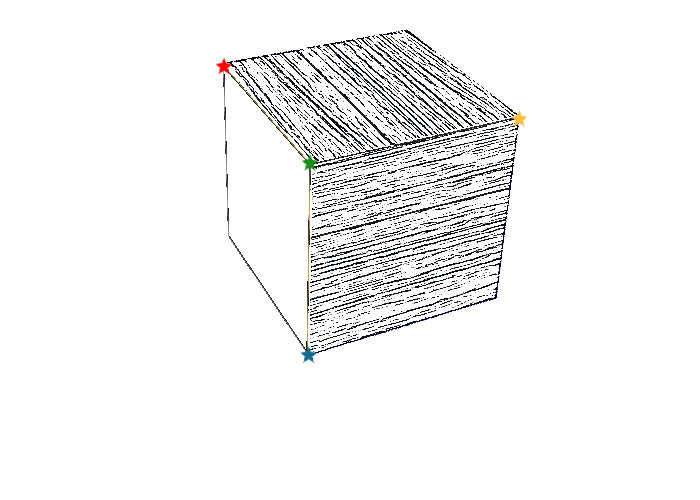
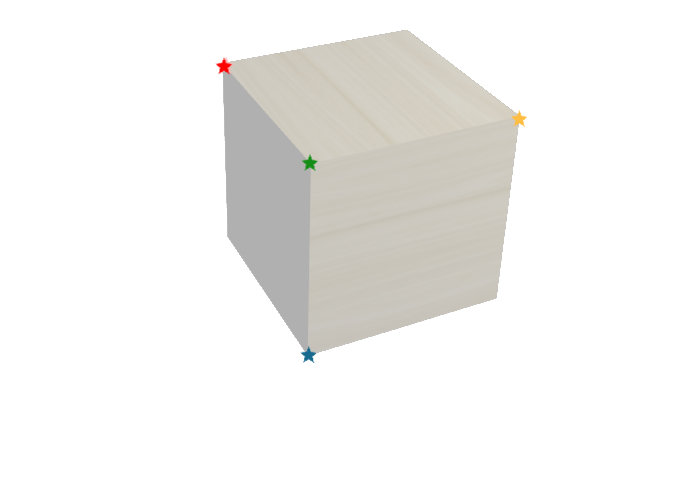
Points qui matchent
Orientation des photos
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Comment obtenir tous les points en 3D ??
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Matthieu QUANTIN 2016
TP photogrammetrie - Phycité
Photogrammetrie_Process
By matthieuquantin




