Lecture 08: Race Conditions, Deadlock, and Data Integrity
Principles of Computer Systems
Autumn 2019
Stanford University
Computer Science Department
Lecturers: Chris Gregg and
Philip Levis


- Signals can execute at any time, preempting your main code
- Preemption can create race conditions, which is when the timing of execution can lead to incorrect output and corrupt data
Masking Signals and Deferring Handlers, Revisited
- One way to prevent race conditions is a critical section
- A critical section is a piece of code that executes atomically
- The code is "indivisible" -- other code sees either before it executes or after
- Other code never sees "during" the critical section/atomic code
- For signals,
sigprocmasklets us define define critical sections- Recall, allows code to block signals
- Code that executes while a signal is blocked is atomic with respect to that signal's handler: the handler executes either before the signal is blocked or after it is unblocked, but never during while it is blocked
- Another approach is to use race-free data structures
- We won't go into great depth in this class
- Simple ones are great (e.g., a circular queue), more complex ones are very tricky
Masking Signals and Deferring Handlers
Critical Section Example with sigprocmask
- The critical section protects against
concurrent writes: the handler won't run
while the counters are being incremented - But it doesn't protect the read!
- Suppose the handler executes while the
ifstatement is executing- Read
counter_1, it's 1 - Handler executes
- Read
counter_2, it's 0 - Execute
printf, readcounter_1, it's 0, readcounter_1, it's 0 - Output says both are 0, but since there's a
printfit means they weren't equal at some point...
- Read
- Fix: move comparison (variable reads) inside the critical section
Close, but not quite!
sigprocmask(SIG_BLOCK, &mask, NULL);
counter_1++;
gettimeofday(&now, NULL);
counter_2++;
sigprocmask(SIG_UNBLOCK, &mask, NULL);
if (counter_1 != counter_2) {
printf("%li.%06li counter_1: %d, counter_2: %d\n",
now.tv_sec, now.tv_usec,
counter_1, counter_2);
return -1;
}Correct Critical Section Example with sigprocmask
The invocation model of signals
| Signal | SIGALRM | SIGCHLD | SIGUSR1 | SIGUSR2 | SIGINT |
|---|---|---|---|---|---|
| Pending | 0 | 1 | 0 | 0 | 0 |
| Enabled | 1 | 0 | 1 | 0 | 1 |
- In practice, signals are implemented in a more complicated fashion than this, but this is their basic invocation model -- it's designed to resemble hardware interrupts
- When a signal arrives, set pending to 1
- Enabled is whether the signal is blocked (false) or not (true)
- Any time pending or enabled changes, if pending && enabled, deliver the signal
- Atomically clear pending and enabled
- When handler completes, restore enabled (unless it was blocked in handler)
-
Race conditions are a fundamental problem in concurrent code
- Decades of research in how to detect and deal with them
- The can corrupt your data and violate its integrity, so it is no longer consistent
- Critical sections can prevent race conditions, but there are two major challenges
- Figuring out exactly where to put all the critical sections
- Structuring your code so critical sections don't limit performance
- Example of challenge 1: You have a tree data structure in your program. A signal handler prints out the tree. Your main code inserts and deletes from the tree. You need to make sure every update to the tree executes atomically, so a signal handler never sees a bad pointer.
- Example of challenge 2: if your code spends most of its time in long critical sections, then signals may be delayed for a long time (making your program less responsive).
Race Conditions and Concurrency
-
The assembly your compiler generates is not a linear, literal version of your program!
- Variables are cached in registers
- Statements can be re-ordered and dead code deleted
- The basic rule: the compiler only promises that you see something consistent with a linear, literal execution of your program
- When might you see your program? When external functions are called (e.g., write(2))
- In between these visibility points it can play lots of tricks
Compilers and Visibility
int x, y;
x = 5;
y = 7;
printf("%d %d\n", x, y)int x, y;
x = 5;
y = 7;
print_ints(&x, &y);Your compiler doesn't have to allocate space for x and y -- it can just pass constants to printf.
Your compiler has to allocate space for x and y -- it doesn't know what print_ints will do.
int x, y;
...
x++;
y = x + 1;
print_ints(&x, &y);Your compiler could have x in a register r, then store r + 1 in x and r + 2 in y. If x were modified between lines 3 and 4, y will still be stored as r + 2.
-
Let's revisit the
simpleshexample from last week. The full program is right here.
- The problem to be addressed: Background processes are left as zombies for the lifetime of the shell. At the time we implemented
simplesh, we had no choice, because we hadn't learned about signals or signal handlers yet.
Detailed Example: Background Process Management and Cleanup
// simplesh.c
int main(int argc, char *argv[]) {
while (true) {
// code to initialize command, argv, and isbg omitted for brevity
pid_t pid = fork();
if (pid == 0) execvp(argv[0], argv);
if (isbg) {
printf("%d %s\n", pid, command);
} else {
waitpid(pid, NULL, 0);
}
}
printf("\n");
return 0;
}
- Now we know about SIGCHLD signals and how to install SIGCHLD handlers to reap zombie processes. Let's upgrade our simplesh implementation to reap all process resources.
Lecture 08: Race Conditions, Deadlock, and Data Integrity
- Relies on a sketchy call to
waitpidto halt the shell until its foreground process has exited.- When the user creates a foreground process,
waitpidexecutes in the main loop - When the foreground process finishes, however, the
SIGCHLDhandler will run too, it callswaitpid - One of them will return the
pid, one will return an error
- When the user creates a foreground process,
- We can incorporate extra logic to handle the fact that some calls to
waitpidexpect to return an error (e.g., suppress error messages), but this is hacking around a poor design
Problem: Redundant Calls to waitpid
- We want the only place that calls
waitpidto be in the SIGCHLD handler - If we run a process in the foreground, go to sleep and have the SIGCHLD handler wake us up when the foreground process completes
- This is a common pattern in concurrent code: you're waiting for something complete, go to sleep until another piece of code wakes you up
-
pause(2)allows us to sleep until a signal handler executes, but this is too coarse: we need to go back to sleep if the signal wasn't for the foreground process
- Basic algorithm:
- Use
pause()to sleep until a signal handler executes - The signal handler sets a variable to tell the main loop whether the foreground process exited
- When the main loop wakes up, it checks the variable, goes back to sleep if needed
- Use
Solution: One to waitpid to rule them all, one waitpid to find them
Updated code
Houston, we have a problem!
static void reapProcesses(int sig) {
while (true) {
pid_t pid = waitpid(-1, NULL, WNOHANG);
if (pid <= 0) {
break;
} else if (pid == fgpid) {
fgpid = 0;
}
}
}
static void waitForForegroundProcess(pid_t pid) {
fgpid = pid;
while (fgpid == pid) {
pause();
}
}
pid_t pid = forkProcess();
if (pid == 0) {...}
if (isbg) {
printf("%d %s\n", pid, command);
} else {
waitForForegroundProcess(pid);
}-
It's possible the foreground process finishes and
reapProcessesis invoked on its behalf beforefgpid. If that happens, the shell will pause forever - This is a race condition: we want to atomically fork the process and update
fgpid, such thatreapProcessesdoes not execute before we setfgpid
- This is a different problem that what we've seen before: no data is corrupted, but we might deadlock
-
Deadlock: program state in which no progress can be made, code is waiting for something that will never happen
- Solution: use
sigprocmaskto block SIGCHLD beforefork, then unblock in child and in parent afterfgpidis set-
int sigprocmask(int how, const sigset_t *set, sigset_t *oldset);
-
Race condition on fgpid
Fixed race condition on fgpid
Can you find the race condition here?
static void waitForForegroundProcess(pid_t pid) {
fgpid = pid;
unblockSIGCHLD();
while (fgpid == pid) {
pause();
}
}- This is a race condition, because we need to atomically unblock SIGCHLD and pause, or we might miss the SIGCHLD and never wake up.
- Suppose the SIGCHLD handler executes between lines 4 and 5 -- pause will never return
- Another deadlock condition
- This cannot be solved with
sigprocmask: there is always a small window between when the signal is unblocked and pause is called
Different kind of race condition
static void waitForForegroundProcess(pid_t pid) {
fgpid = pid;
unblockSIGCHLD();
while (fgpid == pid) {
pause();
}
}- The problem with both versions of
waitForForegroundProcesson the prior slide is that each lifts the block onSIGCHLDbefore going to sleep viapause. - The one
SIGCHLDyou're relying on to notify the parent that the child has finished could very well arrive in the narrow space between lift and sleep. That would inspire deadlock. - The solution is to rely on a more specialized version of
pausecalledsigsuspend, which atomically changes the process signal mask and has it sleep until it handles a signal. When some unblocked signal arrives, the process gets the CPU, the signal is handled, the original blocked set is restored, andsigsuspendreturns.
- This is the model solution to our problem, and one you should emulate in your Assignment 3
farmand your Assignment 4stsh.
sigsuspend to the rescue
// simplesh-all-better.c
static void waitForForegroundProcess(pid_t pid) {
fgpid = pid;
sigset_t empty;
sigemptyset(&empty);
while (fgpid == pid) {
sigsuspend(&empty);
}
unblockSIGCHLD();
}
- Concurrency is powerful: it lets our code do many things at the same time
- It can run faster (more cores!)
- It can do more (run many programs in background)
- It can respond faster (don't have to wait for current action to complete)
- Signals are a way for concurrent processes to interact
- Send signals with kill and raise
- Handle signals with signal
- Control signal delivery with sigprocmask, sigsuspend
- Preempt running code
- Making sure code running in a signal handler works correctly is difficult
- Specialized system calls (pause, sigsuspend) help, but there's still the compiler problem
-
Race conditions occur when code can see data in an intermediate and invalid state (often KABOOM)
- Prevent race conditions with critical sections
-
Deadlock is when your program halts, waiting for something that will never happen
- Assignments 3 and 4 use signals, as a way to start easing into concurrency before we tackle multithreading
- Take CS149 if you want to learn how to write high concurrency code that runs 100x faster
High-level takeaways: signals and concurrency
Questions about signal handling
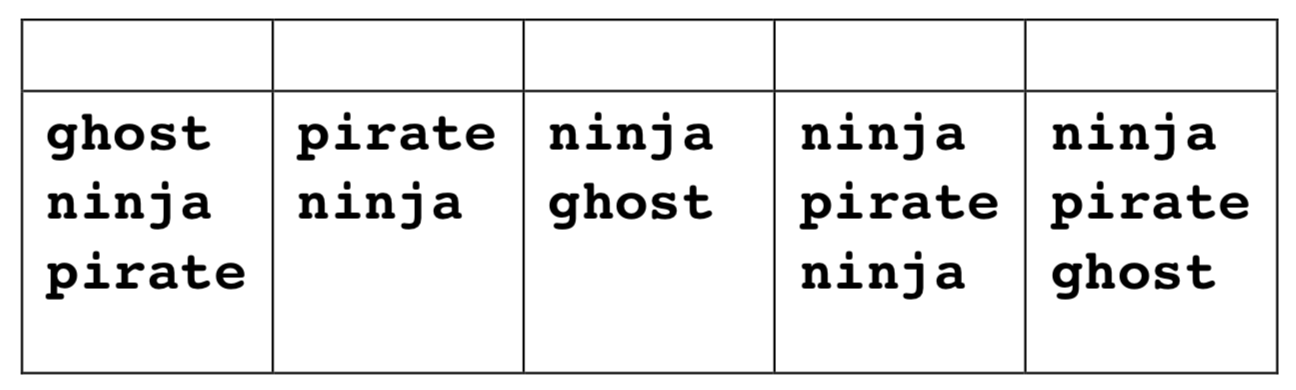
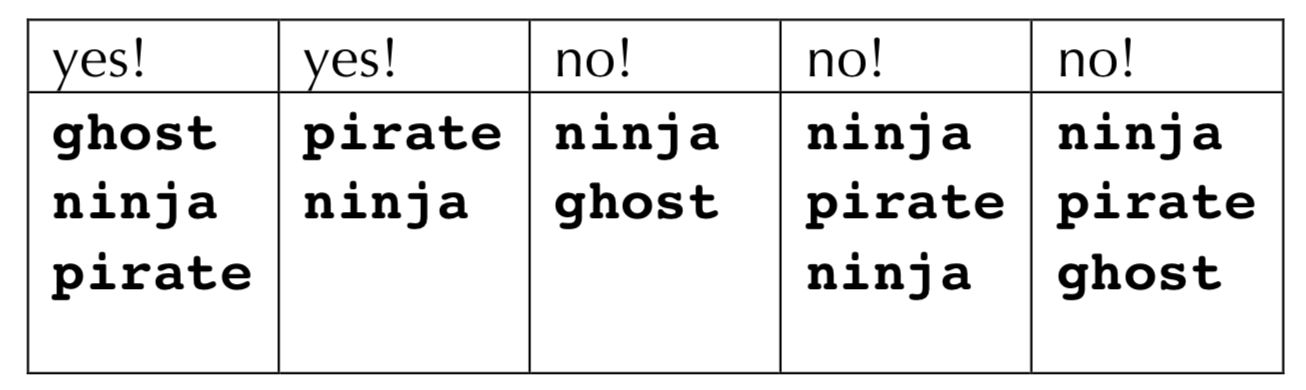
- Consider this program and its execution. Assume that all processes run to completion, all system and
printfcalls succeed, and that all calls toprintfare atomic. Assume nothing about scheduling or time slice durations.
Example midterm question #1
static void bat(int unused) {
printf("pirate\n");
exit(0);
}
int main(int argc, char *argv[]) {
signal(SIGUSR1, bat);
pid_t pid = fork();
if (pid == 0) {
printf("ghost\n");
return 0;
}
kill(pid, SIGUSR1);
printf("ninja\n"); return 0;
}
- For each of the five columns, write a yes or no in the header line. Place a yes if the text below it represents a possible output, and place a no otherwise.
- Consider this program and its execution. Assume that all processes run to completion, all system and
printfcalls succeed, and that all calls toprintfare atomic. Assume nothing about scheduling or time slice durations.
Example midterm question #1
static void bat(int unused) {
printf("pirate\n");
exit(0);
}
int main(int argc, char *argv[]) {
signal(SIGUSR1, bat);
pid_t pid = fork();
if (pid == 0) {
printf("ghost\n");
return 0;
}
kill(pid, SIGUSR1);
printf("ninja\n"); return 0;
}
- For each of the five columns, write a yes or no in the header line. Place a yes if the text below it represents a possible output, and place a no otherwise.
- Consider this program and its execution. Assume that all processes run to completion, all system and
printfcalls succeed, and that all calls toprintfare atomic. Assume nothing about scheduling or time slice durations.
Example midterm question #2
int main(int argc, char *argv[]) {
pid_t pid;
int counter = 0;
while (counter < 2) {
pid = fork();
if (pid > 0) break;
counter++;
printf("%d", counter);
}
if (counter > 0) printf("%d", counter);
if (pid > 0) {
waitpid(pid, NULL, 0);
counter += 5;
printf("%d", counter);
}
return 0;
}- List all possible outputs
- Consider this program and its execution. Assume that all processes run to completion, all system and
printfcalls succeed, and that all calls toprintfare atomic. Assume nothing about scheduling or time slice durations.
Example midterm question #2
int main(int argc, char *argv[]) {
pid_t pid;
int counter = 0;
while (counter < 2) {
pid = fork();
if (pid > 0) break;
counter++;
printf("%d", counter);
}
if (counter > 0) printf("%d", counter);
if (pid > 0) {
waitpid(pid, NULL, 0);
counter += 5;
printf("%d", counter);
}
return 0;
}- List all possible outputs
- Possible Output 1: 112265 Possible Output 2: 121265 Possible Output 3: 122165
- The grandparent that starts with counter 0 exits last, because it waits on its child; the last output is 5
- The parent that starts with counter 1 exits second to last, after waiting for its child; the second-to-last output is 6
- The parent that starts with counter 1 outputs first
- The second parent (1) output and the two child (2)
outputs are up to the scheduler
If we have time...
Playing with fire
Playing with fire
signal 1570987083.612345 counter_1: 0, counter_2: 1 1570987083.612345 counter_1: 0, counter_2: 1 signal
??????
- Recall that the kernel has user processes execute signal handlers by pushing stack frames
- What happens if it does this while a function is executing, and the handler calls the same function?
- Standard example: printf, stdio
- In the middle of a printf, your signal handler runs and calls printf
- This is called reentrancy
- Code is reentrant safe if it will execute correctly when re-entered mid-execution
- printf() is not reentrant safe
Reentrant code
user
stack
kernel
kernel
stack
user CPU context
signal
- Recall that the kernel has user processes execute signal handlers by pushing stack frames
- What happens if it does this while a function is executing, and the handler calls the same function?
- Standard example: printf, stdio
- In the middle of a printf, your signal handler runs and calls printf
- This is called reentrancy
- Code is reentrant safe if it will execute correctly when re-entered mid-execution
- printf() is not reentrant safe (remember those weird double-prints...)
Reentrant code
user
stack
kernel
kernel
stack
signal
printf
printf
- POSIX defines which functions are async-signal-safe, that is, asynchronous signals can call safely
- These functions are reentrant safe
- All of your system call friends so far: read, write, signal, open, dup2, pipe, execve
- Lots of string functions: strcmp, strcpy, etc.
-
$ man signal-safety
- The basic issue is static buffers: recall what happened to our buffer when the SIGALRM handler cleared it
- None of stdio is async-signal-safe
Async-signal-safe
- Signals are the first appearance of concurrent/reentrant code in UNIX
- It turns out that correctly handling concurrency and reentrancy in a clean way that's not hair-pullingly difficult requires a bit of support and atomicity in APIs (e.g., sigsuspend)
- Using the simple signal APIs is rife with problems: it seems to work, but then fails in ways you did not expect or anticipate
- We now understand concurrency and reentrancy much better, and subsequent APIs (e.g., pthreads, which we'll start covering on Wednesday) are much cleaner
- You can't safely call printf from a signal handler (it's not async-signal-safe), but you can call it in a multithreaded program (it is thread-safe)
The root of the problem
Questions, please
CS110 Lecture 08: Race Conditions, Deadlock, and Data Integrity
By philip_levis
CS110 Lecture 08: Race Conditions, Deadlock, and Data Integrity
Race conditions caused by signal handlers, and how race conditions can corrupt data or lead to deadlock. Critical sections and masking signals to have critical sections with signals. Necessity of atomic operations, and sigsuspend.




