Bewegung trotz Stillstand
Philipp Mitterschiffthaler



Die Erde
Die Erde aus der Sicht des Geodäten...



3D - Koordinatensystem
- Koordinatensystem rotiert mit der Erde
- Koordinatenursprung liegt im Erdschwerpunkt
- Z-Achse parallel zur Rotationsachse
- X-Achse zeigt Richtung Greenwich
- Y-Achse Normale auf X- und Z-Achse

X^E(t_c)= X_{yy}^I(t_c) + T_{yy} + \begin{pmatrix} 0 & -R3_{yy} & R2_{yy} \\ R3_{yy} & 0 & -R1_{yy} \\ -R2_{yy} & R1_{yy} & 0 \end{pmatrix} \times X_{yy}^I(t_c) * (t_c -1989.0)
Definition einer Koordinate

Definition einer Koordinate
\lambda = atan(Y/X)
\phi=atan(\frac{Z+e'^2 b sin^3(\theta)}{p-e^2 a cos^3(\theta)})
h = \frac{p}{\cos{\phi}}-N

Definition einer Koordinate
y = N \Delta L cos(B) + \frac{N}{6} \Delta L^3 cos^3(B)(1-t^2+\eta^2)+...
x = S_m \frac{N}{2} \Delta L^2 sin(B) cos(B) + \frac{N}{24} \Delta L^4 sin(B) cos^3(B)(5-t^2+9\eta^2+4\eta^4)+...
{
"features": {
"type": "FeatureCollection",
"name": "MyCoordinates_1",
"features": [
{},
{},
{},
],
"crs": {
"type": "BEV",
"name": "MyCRS",
"properties": {
"frame": 301,
"ellipsoid": "EPSG::7004",
"prime_meridian": "EPSG::8901",
"projection": "",
"height_system": "",
"epoch": 2002.56,
}
}
}Definition einer Koordinate - GeoJSON im BEV Transformator
ITRF


ITRF


ITRF

ITRF


696
188

GGOS

http://www.unoosa.org/pdf/icg/2012/icg-7/30.pdf - Chris Rizos - 2012


ITRF horizontal velocities

ITRF vertical velocities

EPN stations horizontal velocities in ITRF2014

EPN stations horizontal velocities in ETRF2014
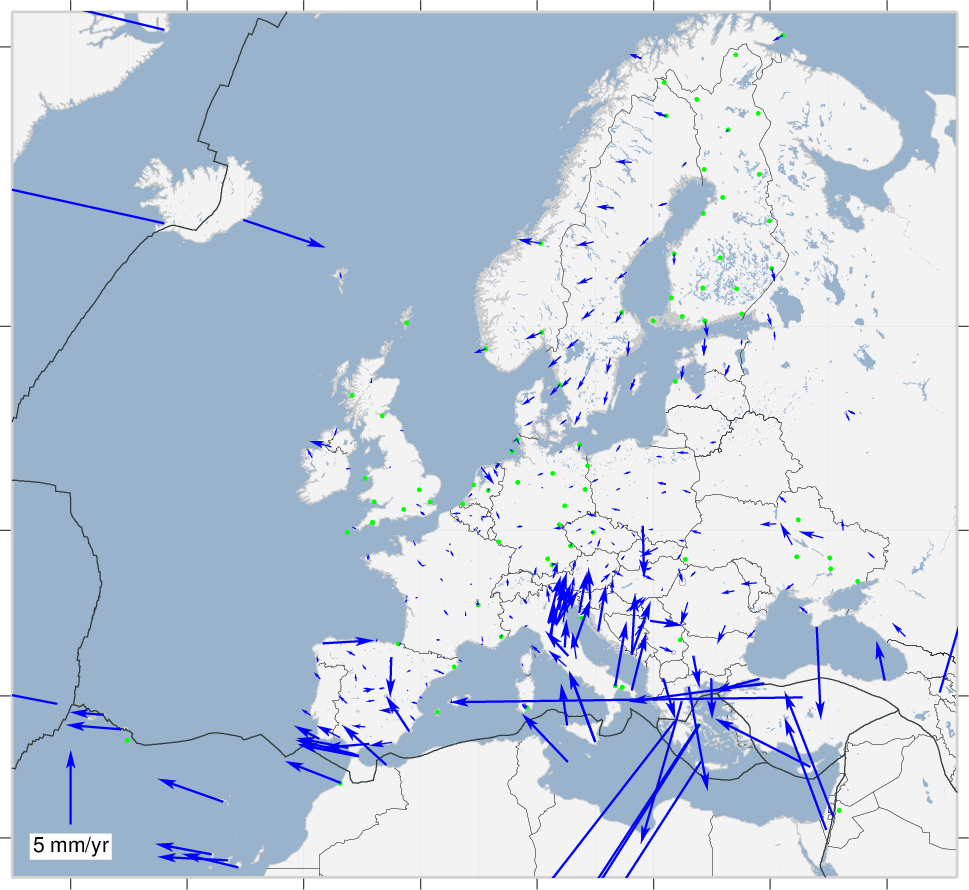
EPN stations vertical velocities in ETRF2014

EUREF Permanent Network (EPN)


327 Stationen
71 inaktive Stationen




BEV DC

BEV DC

- 60.000 Files
- 10 GB Daten
- pro Tag!
- 4 Mio daily files
- 42 Mio hourly files
- 2,8 TB komprimierte Daten
- Daten seit 1995
BEV AC - subnetwork

MGI

Josefstadt
(Maßstab)
Hundsheimer Berg (Orientierung)
Hermannskogel (Lagerung)

MGI
| Ordnung | Abstand [km] | Anzahl |
|---|---|---|
| 1 | 35 | 138 |
| 2 | 18 | 427 |
| 3 | 11 | ~ 1.550 |
| 4 | 4 | ~ 8.600 |
| 5 | 1 | ~ 46.100 |
| 6 | 0,3 | ~ 167.000 |
147T von 224T Punkte haben ETRS Koordinaten


BEV ETRS 2000 (Epoche 2002.56)

- Session GPS Week 1176 (21.7. - 27.7.02) -> 2002.56
- Auswertung von OLG und TUW
- Akzeptiert von EUREF TWG als offizielle österreichische Lösung
- Datumspunkte: GRAZ, WTZR, PENC, ZIMM
statische Messungen 1989-2012

- 29.000 TP
- 20.000 EP
- ~ 3 Basislinien/Punkt
APOS Messungen 2003-2017
- 10.000 TP
- 93.000 EP

terrestrische Messungen 1910-1997

ETRS in Österreich - vertical velocities

ETRS in Österreich - horizontal velocities

ETRS in Österreich - WIEN00AUT

ETRS <-> MGI
X, Y, Z
\phi, \lambda, h
x, y, h
X, Y, Z
\phi, \lambda, h
x, y, h
ETRS
MGI
7-Parameter-Transformation
{
dX: -577.326,
dY: -90.129,
dZ: -463.919,
a(x): 5.137'',
a(y): 1.474'',
a(z): 5.297'',
dm: -0.0000024232
}
Genauigkeit < 1.5m
ETRS <-> MGI
X, Y, Z
\phi, \lambda, h
x, y, h
X, Y, Z
\phi, \lambda, h
x, y, h
ETRS
MGI
GIS Grid
Genauigkeit < 0.15m
GIS Grid

ETRS <-> MGI
X, Y, Z
\phi, \lambda, h
x, y, h
X, Y, Z
\phi, \lambda, h
x, y, h
ETRS
MGI
Bestimmung über Passpunkte
Genauigkeit < 0.05m
ETRS <-> MGI - lokale Transformation über Passpunkte
X, Y, Z
\phi, \lambda, h
x, y, h
X, Y, Z
\phi, \lambda, h
x, y, h
ETRS
MGI
1. Schritt:
7-Parameter Transformation und Verebnung in spannungsfreie MGI Koordinaten (x',y',h')
2. Schritt:
Bestimmung von lokalen 4 TransformationsParameter
X', Y', Z'
\phi', \lambda', h'
x', y', h'
MGI' (spannungsfrei)
7-Parameter-Transformation
4-Parameter-Bestimmung
Höhe
- Datum: Molo Satorio (Triest) 1875
- Messungen im Präzisionsnivellement auf Minimum reduziert
- Fokus auf Geoidbestimmung
- Verdichtung der Schwerewerte

Höhentransformation
Transformation über Näherungen und Grid-Produkte des BEVs.
Mittlerweile sind sämtliche Grids kostenlos verfügbar!
BEV Transformator
https://transformator.bev.gv.at/at.gv.bev.transformator/austrian

Höhentransformation


Zusammenfassung
- GGOS
- EUREF AC/DC
- Neurechnung Festpunkte
- BEV Transformator
Paradigmenwechsel von statischen Referenzsystemen
zu Real Time Reference Systems

Bewegung trotz Stillstand
Philipp Mitterschiffthaler
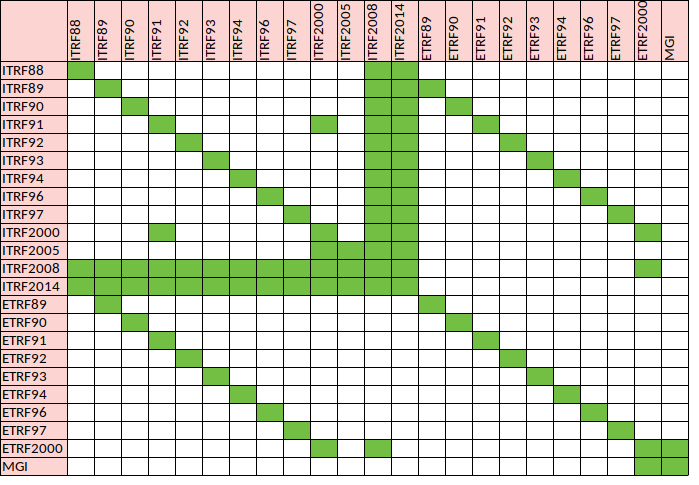
Transformationsmöglichkeiten zwischen Frames
Beispiel Koordinatentransformation - GRAZ00AUT

Beispiel Koordinatentransformation - GRAZ00AUT

Beispiel Koordinatentransformation - GRAZ00AUT

Beispiel Koordinatentransformation - GRAZ00AUT

\Delta \vec{x} = 762.322m
Beispiel Koordinatentransformation - GRAZ00AUT

\Delta \vec{x} = 37.0cm
Beispiel Koordinatentransformation - GRAZ00AUT

\Delta \vec{x} = 0.8cm
Beispiel Koordinatentransformation - GRAZ00AUT

\Delta \vec{x} = 3.2cm
Beispiel Koordinatentransformation - GRAZ00AUT

\Delta \vec{x} = 35.7cm
Beispiel Koordinatentransformation - GRAZ00AUT

Beispiel Koordinatentransformation - GRAZ00AUT

Bewegung trotz Stillstand
By Philipp Mitterschiffthaler




