















































































Roberto Calandra PRO
Full Professor at TU Dresden. Head of the LASR Lab. Working in AI, Robotics and Touch Sensing.
Roberto Calandra
Columbia University - 07 June 2024
Learning, Adaptive Systems, and Robotics (LASR) Lab
How to scale to more complex, unstructured domains?
Robotics
Finance
Biological Sciences
Logistics /
Decision Making
Disaster Relief
Industrial Automation
Exploration
Medicine & Eldercare
From YouTube: https://www.youtube.com/watch?v=g0TaYhjpOfo
Multi-modal Sensing
Adaptive Hardware configuration
Quick adaptation to new tasks
Touch Sensing
Morphological adaptation
In this talk
Model-based
Reinforcement Learning
Hardware
Software
From the lab of Dr. Ronald Johansson, Dept. of Physiology, University of Umea, Sweden
Standardization, and the creation of an ecosystem of tools
Hardware
Software
(~1890)
(~1990)
(2020s ?)
+ Applications
+ Community
Important factors:
Many many sensors in the literature:
[Wilson et al., 2019]
[Piacenza et al., 2020]
[ Fischel et al., 2012]
[Zhang et al., 2018]
[Church et al., 2019]
[Hillis, W. D. A High-Resolution Imaging Touch Sensor The International Journal of Robotics Research, 1982, 1, 33-44 ]
[Tanie, K.; Komoriya, K.; Kaneko, M.; Tachi, S. & Fujikawa, A. A high resollution tactile sensor Proc. of 4th Int. Conf. on Robot Vision and Sensory Controls, 1984, 251, 260]
[Begej, S. Planar and finger-shaped optical tactile sensors for robotic applications IEEE Journal on Robotics and Automation, 1988, 4, 472-484]
[Kamiyama, K.; Kajimoto, H.; Kawakami, N. & Tachi, S. Evaluation of a vision-based tactile sensor IEEE International Conference on Robotics and Automation (ICRA), 2004, 2, 1542-1547 ]
[Johnson, M. K. & Adelson, E. H. Retrographic sensing for the measurement of surface texture and shape Computer Vision and Pattern Recognition (CVPR), 2009, 1070-1077]
[Abad, A. C. & Ranasinghe, A. Visuotactile Sensors With Emphasis on GelSight Sensor: A Review IEEE Sensors Journal, 2020, 20, 7628-7638]
Credit:
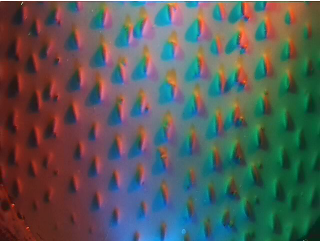
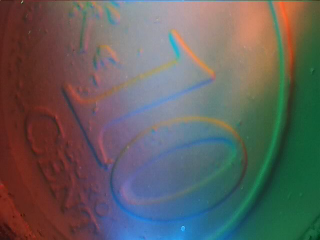
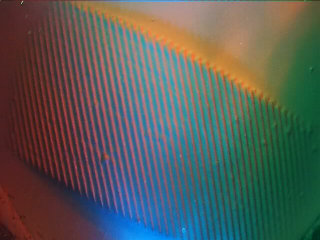
[Yuan, W.; Dong, S. & Adelson, E. H. GelSight: High-Resolution Robot Tactile Sensors for Estimating Geometry and Force Sensors, Multidisciplinary Digital Publishing Institute, 2017]
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
BioTac
DIGIT
~15,000 $
Cost
~15 $*
Resolution
29
taxels
307,200
taxels
Mounted on multi-finger hands
Open-source
1000x
Higher resolution
1000x
Cheaper
* component cost for 1000 units, not including labor
Replicated in 20+ universities
Yet, it can still be challenging to manufacture a sensor without mechanical/electrical experience
Partnership with GelSight Inc. to commercialize DIGIT
Most widespread tactile sensor in robotics!
Part of Mitsubishi Electric RAISE (Robotics as an Intelligent Services Ecosystem)
Padmanabha, A.; Ebert, F.; Tian, S.; Calandra, R.; Finn, C.; Levine, S.
OmniTact: A Multi-Directional High-Resolution Touch Sensor
IEEE International Conference on Robotics and Automation (ICRA) , 2020
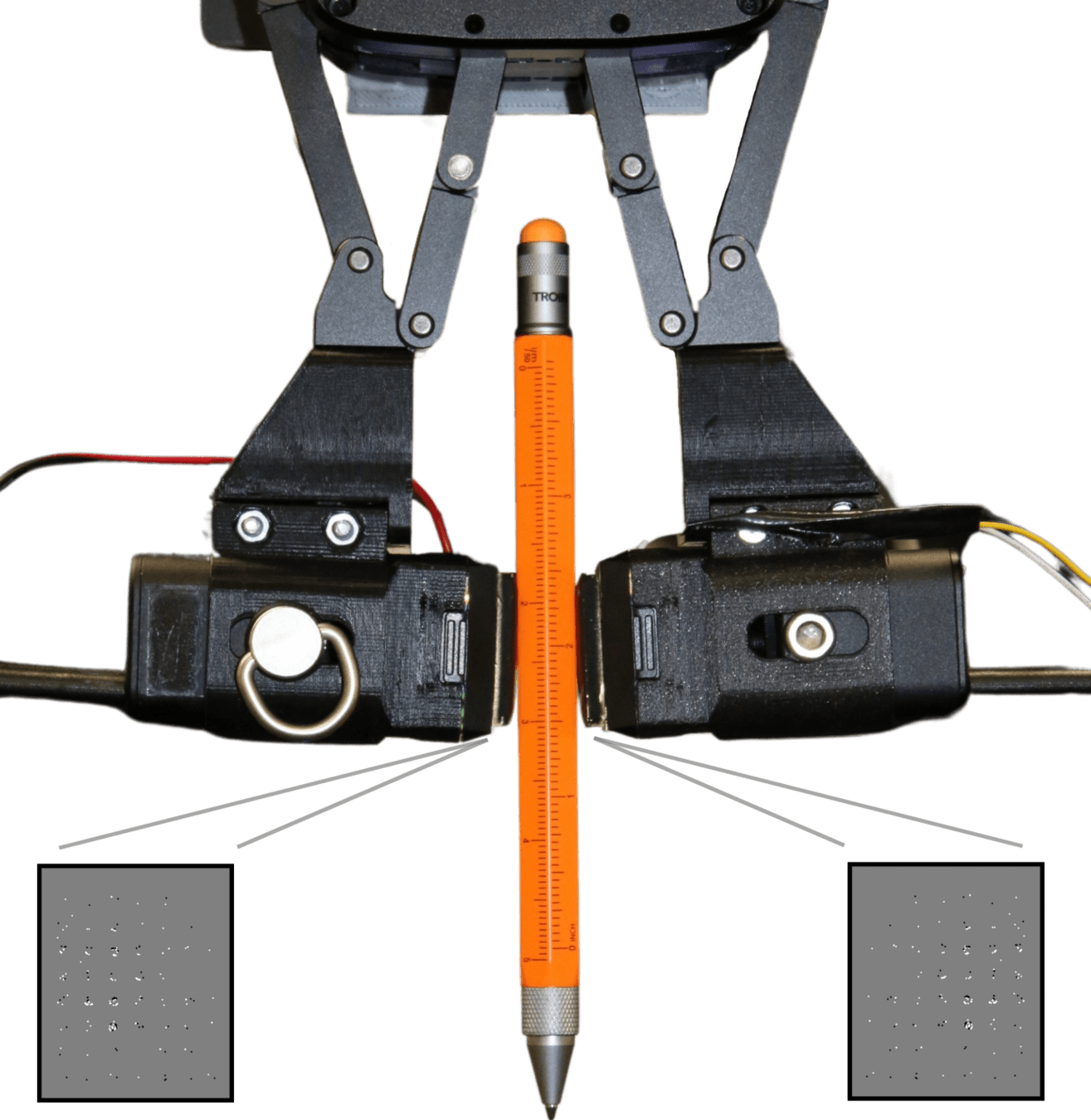
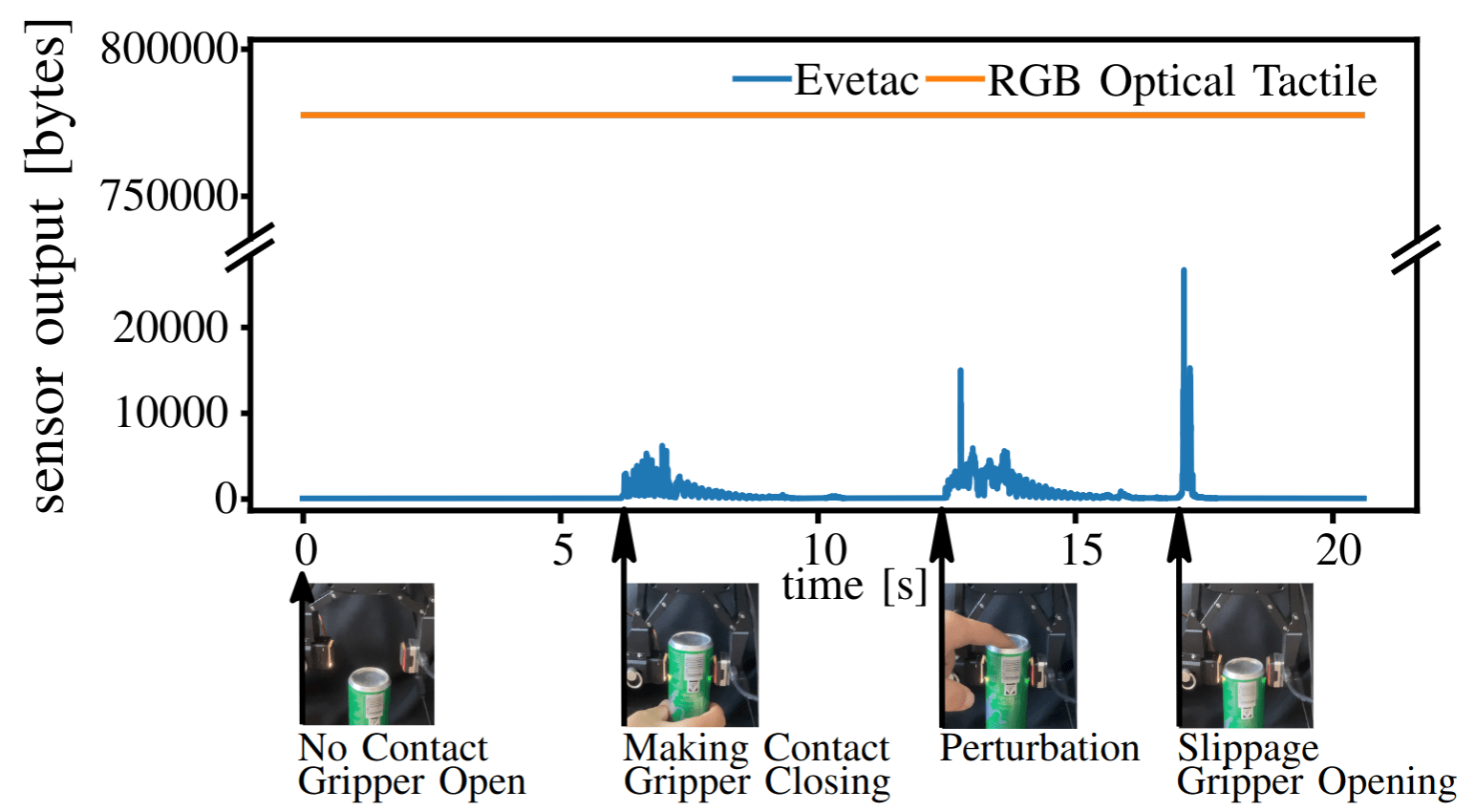
Funk, N.; Helmut, E.; Chalvatzaki, G.; Calandra, R. & Peters, J.
Evetac: An Event-based Optical Tactile Sensor for Robotic Manipulation
Under Review, 2023 https://arxiv.org/abs/2312.01236
Funk, N.; Helmut, E.; Chalvatzaki, G.; Calandra, R. & Peters, J.
Evetac: An Event-based Optical Tactile Sensor for Robotic Manipulation
Accepted to T-RO, 2023 https://arxiv.org/abs/2312.01236
Funk, N.; Helmut, E.; Chalvatzaki, G.; Calandra, R. & Peters, J.
Evetac: An Event-based Optical Tactile Sensor for Robotic Manipulation
Accepted to T-RO, 2023 https://arxiv.org/abs/2312.01236
12%
1.7% over
entire
trajectory
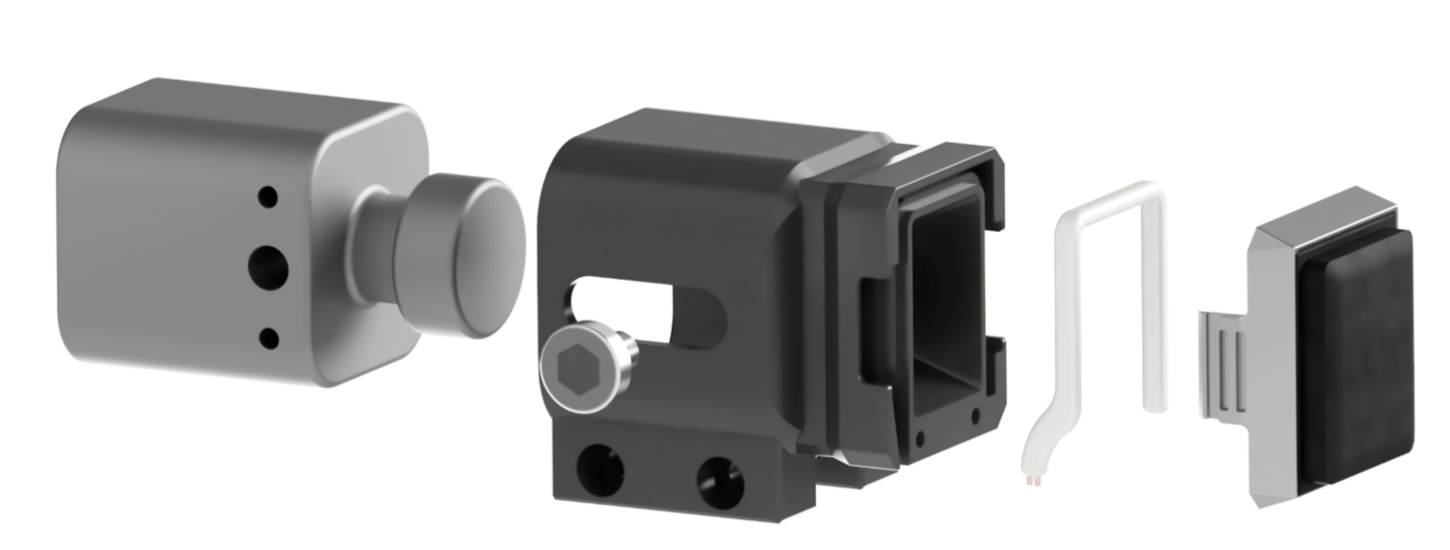
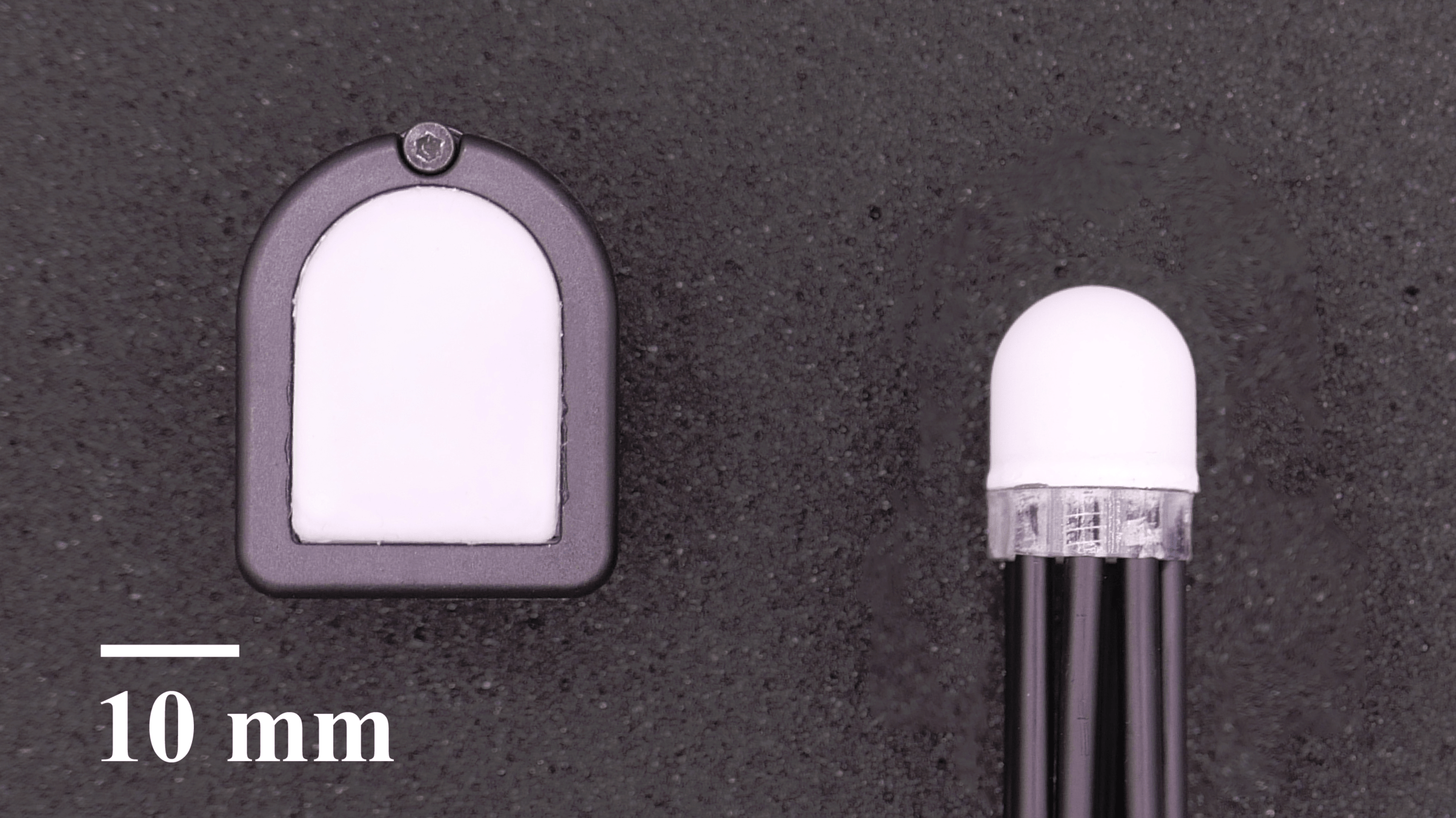
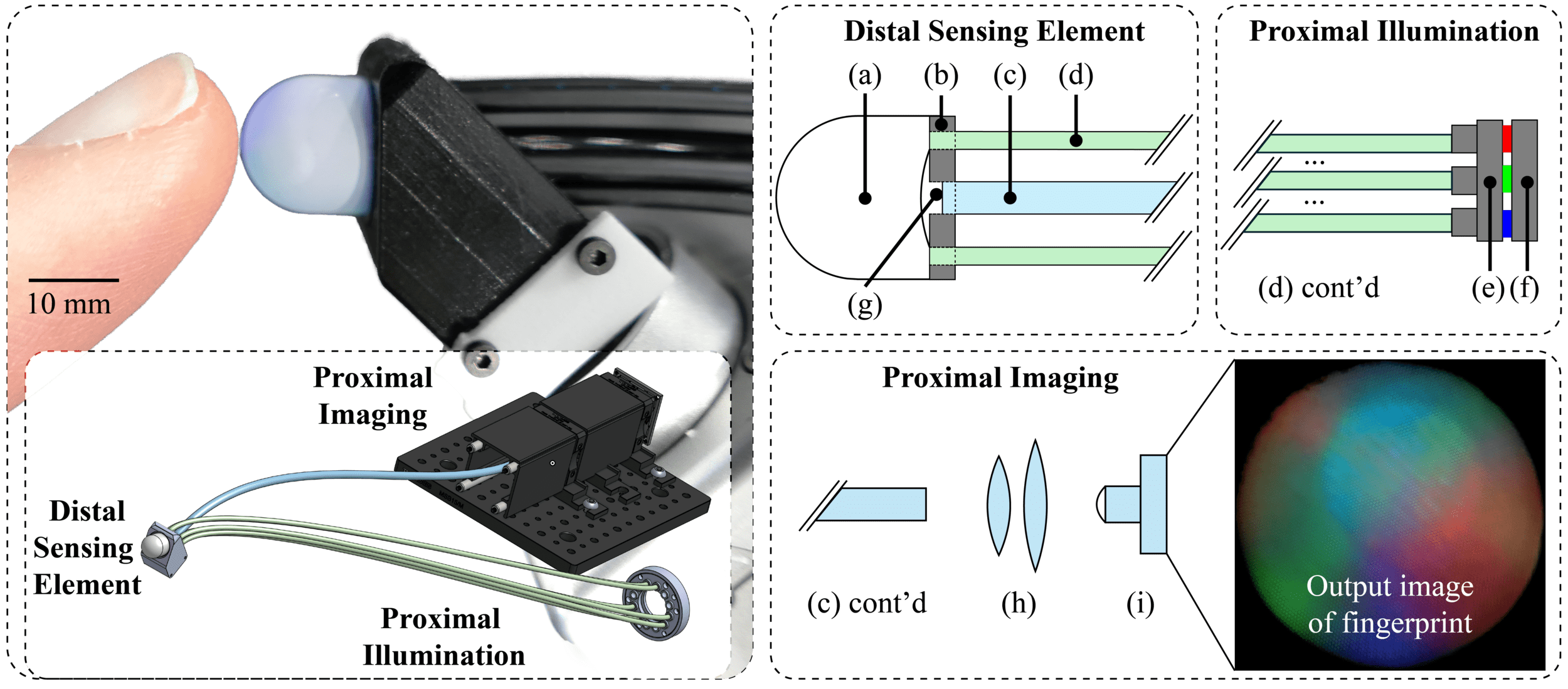
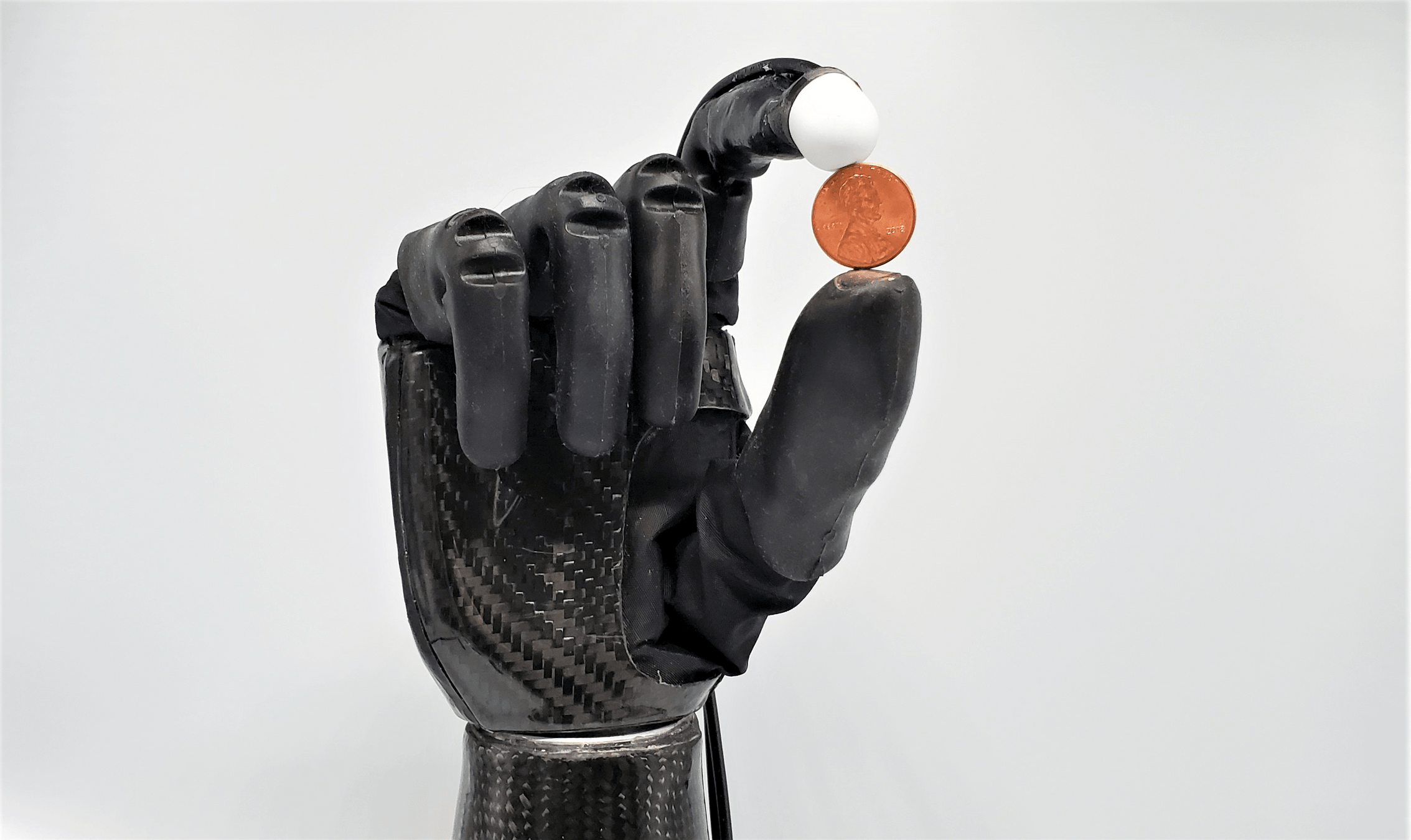
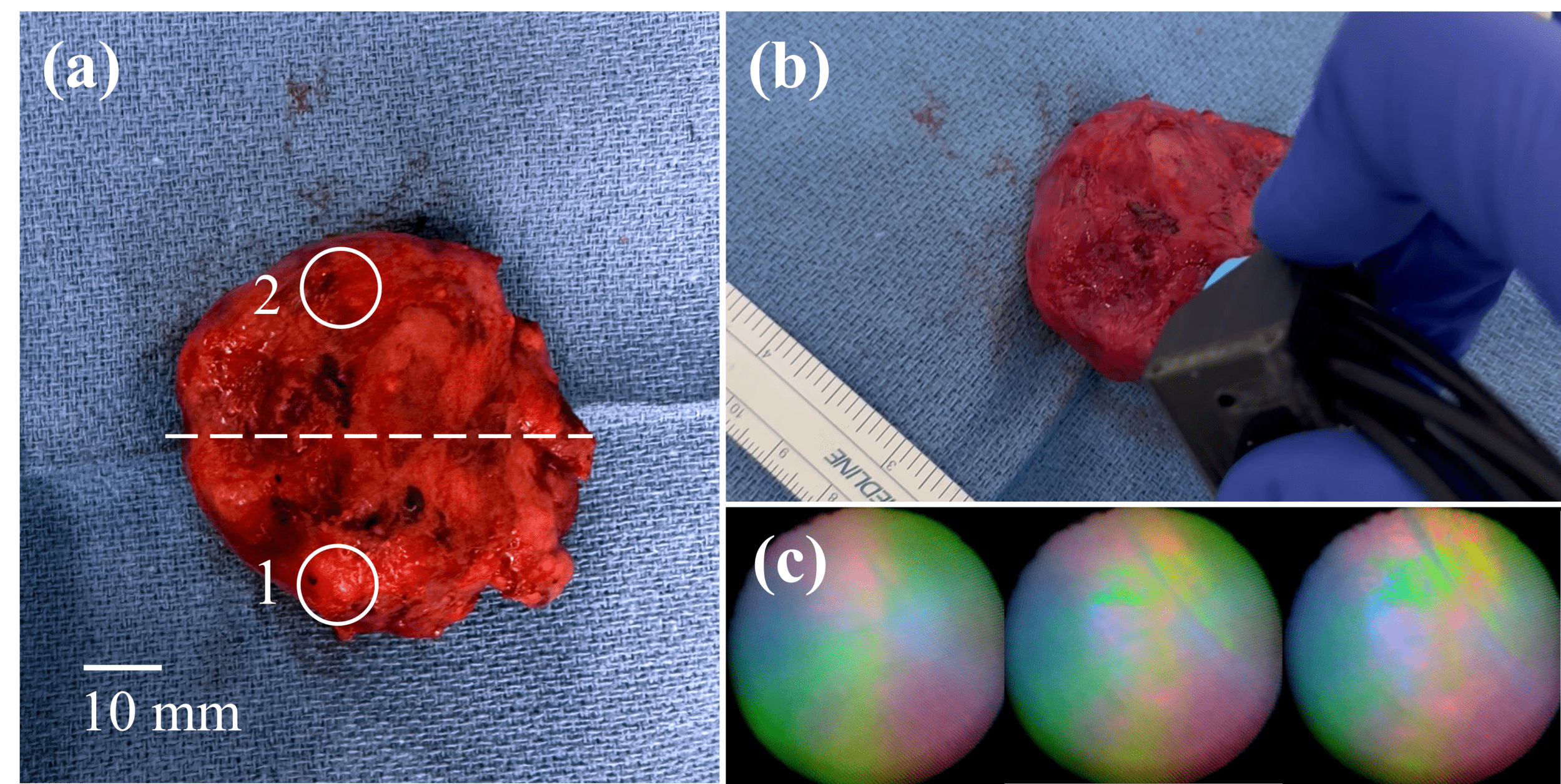
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Under Review, 2024 https://arxiv.org/abs/2403.05500
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Under Review, 2024 https://arxiv.org/abs/2403.05500
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Under Review, 2024 https://arxiv.org/abs/2403.05500
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Under Review, 2024 https://arxiv.org/abs/2403.05500
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Under Review, 2024 https://arxiv.org/abs/2403.05500
Cancer
No Cancer
Some of the open questions:
Very limited literature about computational processing of touch sensing
Goal: Create the equivalent of OpenCV for Touch
Lambeta, M.; Xu, H.; Xu, J.; Chou, P.-W.; Wang, S.; Darrell, T. & Calandra, R.
PyTouch: A Machine Learning Library for Touch Processing
IEEE International Conference on Robotics and Automation (ICRA), 2021, Online: https://arxiv.org/abs/2105.12791
Lambeta, M.; Xu, H.; Xu, J.; Chou, P.-W.; Wang, S.; Darrell, T. & Calandra, R.
PyTouch: A Machine Learning Library for Touch Processing
IEEE International Conference on Robotics and Automation (ICRA), 2021
Kerr, J.; Huang, H.; Wilcox, A.; Hoque, R.; Ichnowski, J.; Calandra, R. & Goldberg, K.
Self-Supervised Visuo-Tactile Pretraining to Locate and Follow Garment Features
Robotics: Science and Systems (RSS) 2023, Online: https://arxiv.org/pdf/2209.13042
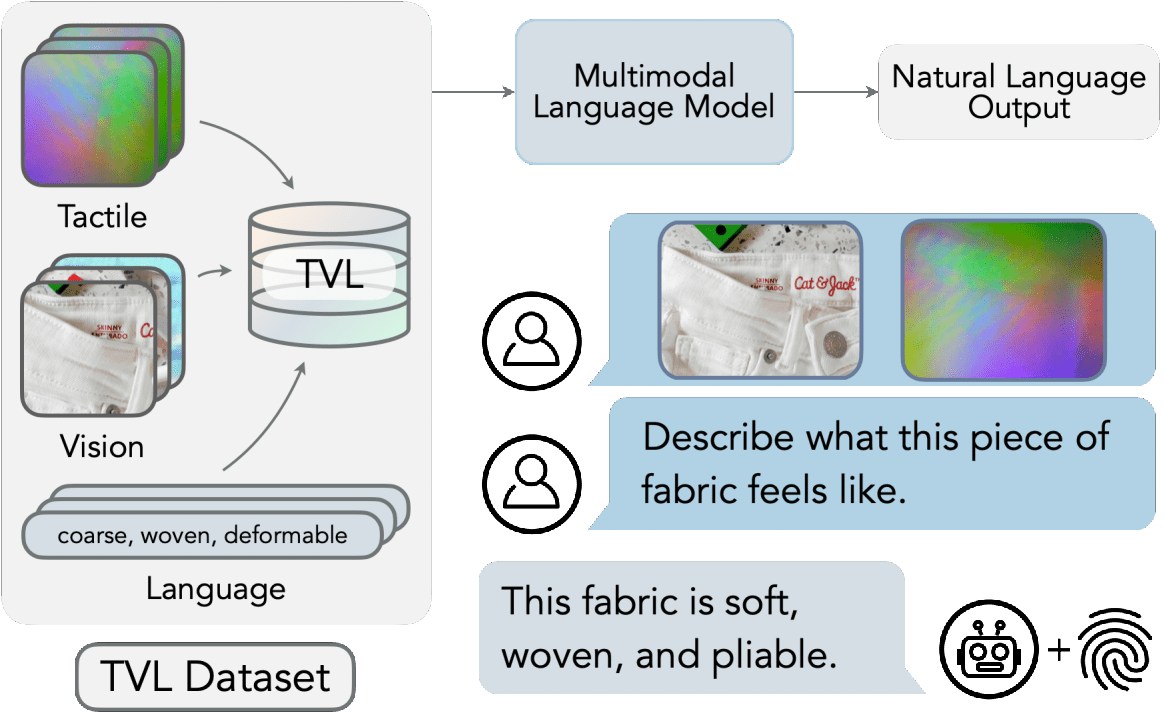
Fu, L.; Datta, G.; Huang, H.; Panitch, W. C.-H.; Drake, J.; Ortiz, J.; Mukadam, M.; Lambeta, M.; Calandra, R. & Goldberg, K.
A Touch, Vision, and Language Dataset for Multimodal Alignment
Accepted to ICML 2024 https://arxiv.org/abs/2402.13232
Suresh, S.; Qi, H.; Wu, T.; Fan, T.; Pineda, L.; Lambeta, M.; Malik, J.; Kalakrishnan, M.; Calandra, R.; Kaess, M.; Ortiz, J. & Mukadam, M.
Neural feels with neural fields: Visuo-tactile perception for in-hand manipulation
Under Review, 2023 https://arxiv.org/abs/2312.13469
Robotics
Metaverse
(AR/VR)
E-commerce
Medical
Predicting Grasp Stability
[Calandra et al. 2017]
Learning how to (Re)Grasp
[Calandra et al. 2018]
Active Tactile Exploration
[Yi at al. 2016]
3D Reconstruction from Vision and Touch
[Smith et al. 2020; Smith et al. 2021]
Identify Objects from Touch
[Lin et al. 2019]
Learning to Play Piano from Touch
[Xu at al. 2022]
Calandra, R.; Owens, A.; Jayaraman, D.; Yuan, W.; Lin, J.; Malik, J.; Adelson, E. H. & Levine, S.
More Than a Feeling: Learning to Grasp and Regrasp using Vision and Touch
IEEE Robotics and Automation Letters (RA-L), 2018, 3, 3300-3307
Collected 6450 grasps from over 60 training objects over ~2 weeks.
83.8% grasp success on 22 unseen objects
(using only vision yields 56.6% success rate)
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
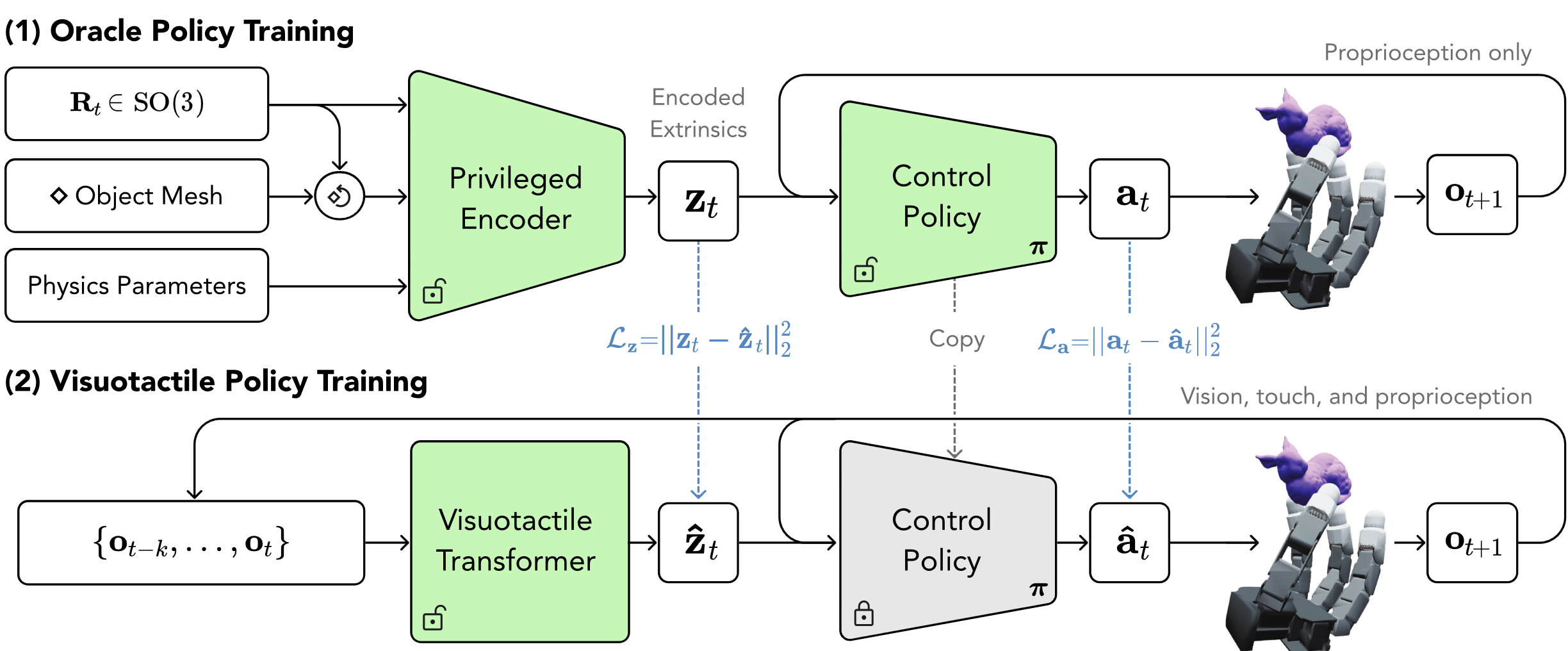
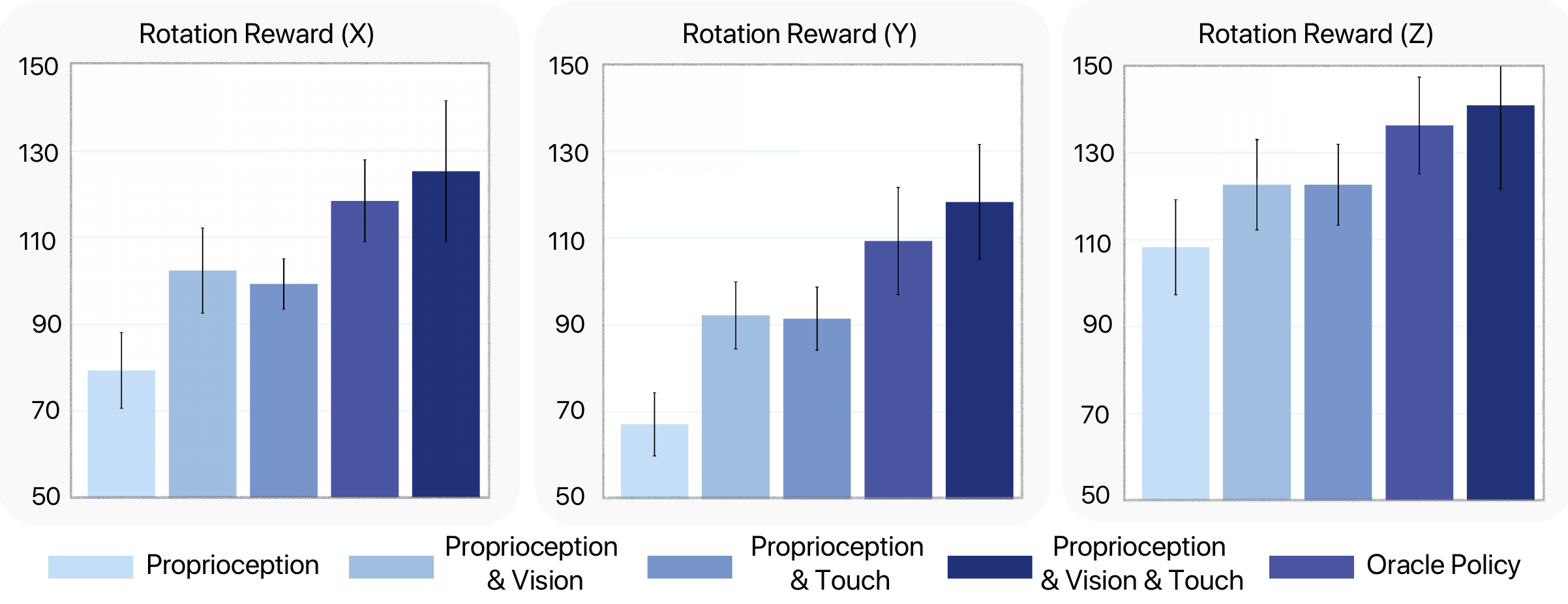
Qi, Haozhi, Brent Yi, Sudharshan Suresh, Mike Lambeta, Yi Ma, Roberto Calandra, and Jitendra Malik.
General In-Hand Object Rotation with Vision and Touch.
Conference on Robot Learning (CORL). 2023 https://arxiv.org/abs/2309.09979
Qi, Haozhi, Brent Yi, Sudharshan Suresh, Mike Lambeta, Yi Ma, Roberto Calandra, and Jitendra Malik.
General In-Hand Object Rotation with Vision and Touch.
Conference on Robot Learning (CORL). 2023 https://arxiv.org/abs/2309.09979
Qi, Haozhi, Brent Yi, Sudharshan Suresh, Mike Lambeta, Yi Ma, Roberto Calandra, and Jitendra Malik.
General In-Hand Object Rotation with Vision and Touch.
Conference on Robot Learning (CORL). 2023 https://arxiv.org/abs/2309.09979
Thank you!
DIGIT
TACTO
PyTouch
Wang, S.; Lambeta, M.; Chou, L. & Calandra, R.
TACTO: A Fast, Flexible and Open-source Simulator for High-Resolution Vision-based Tactile Sensors
IEEE Robotics and Automation Letters (RA-L), 2022, 7, 3930-3937, Online: https://arxiv.org/abs/2012.08456
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Sense
Process
Reproduce
Fritsche, L.; Unverzagt, F.; Peters, J. & Calandra, R.
First-Person Tele-Operation of a Humanoid Robot
IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS), 2015
Calandra, R.; Owens, A.; Upadhyaya, M.; Yuan, W.; Lin, J.; Adelson, E. H. & Levine, S.
The Feeling of Success: Does Touch Sensing Help Predict Grasp Outcomes?
Conference on Robot Learning (CORL), 2017, 314-323
Cannata, G.; Maggiali, M.; Metta, G. & Sandini, G.
An embedded artificial skin for humanoid robots
IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), 2008, 434-438
Lambeta, M.; Xu, H.; Xu, J.; Chou, P.-W.; Wang, S.; Darrell, T. & Calandra, R.
PyTouch: A Machine Learning Library for Touch Processing
IEEE International Conference on Robotics and Automation (ICRA), 2021, Online: https://arxiv.org/abs/2105.12791
Xu, H.; Luo, Y.; Wang, S.; Darrell, T. & Calandra, R.
Towards Learning to Play Piano with Dexterous Hands and Touch
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2022, online: https://arxiv.org/abs/2106.02040
Qi, H.; Kumar, A.; Calandra, R.; Ma, Y. & Malik J.
In-Hand Object Rotation via Rapid Motor Adaptation
Conference on Robot Learning (CORL), 2022, https://arxiv.org/abs/2210.04887
More force = better grasp
But not always ?
Calandra, R.; Owens, A.; Jayaraman, D.; Yuan, W.; Lin, J.; Malik, J.; Adelson, E. H. & Levine, S.
More Than a Feeling: Learning to Grasp and Regrasp using Vision and Touch
IEEE Robotics and Automation Letters (RA-L), 2018, 3, 3300-3307
By Roberto Calandra
Touch is a crucial sensor modality in both humans and robots. Recent advances in tactile sensing hardware have resulted -- for the first time -- in the availability of mass-produced, high-resolution, inexpensive, and reliable tactile sensors. In this talk, I will argue for the importance of creating a new computational field of "Touch processing" dedicated to the processing and understanding of touch, similarly to what computer vision is for vision. This new field will present significant challenges both in terms of research and engineering. To start addressing some of these challenges, I will introduce our open-source ecosystem dedicated to touch sensing research. Finally, I will present some applications of touch in robotics and discuss other future applications.




