







Roberto Calandra PRO
Full Professor at TU Dresden. Head of the LASR Lab. Working in AI, Robotics and Touch Sensing.
Roberto Calandra
ICRA Vitac - 17 May 2024
Learning, Adaptive Systems, and Robotics (LASR) Lab
+ Applications
+ Community
[Hillis, W. D. A High-Resolution Imaging Touch Sensor The International Journal of Robotics Research, 1982, 1, 33-44 ]
[Tanie, K.; Komoriya, K.; Kaneko, M.; Tachi, S. & Fujikawa, A. A high resollution tactile sensor Proc. of 4th Int. Conf. on Robot Vision and Sensory Controls, 1984, 251, 260]
[Begej, S. Planar and finger-shaped optical tactile sensors for robotic applications IEEE Journal on Robotics and Automation, 1988, 4, 472-484]
[Kamiyama, K.; Kajimoto, H.; Kawakami, N. & Tachi, S. Evaluation of a vision-based tactile sensor IEEE International Conference on Robotics and Automation (ICRA), 2004, 2, 1542-1547 ]
[Johnson, M. K. & Adelson, E. H. Retrographic sensing for the measurement of surface texture and shape Computer Vision and Pattern Recognition (CVPR), 2009, 1070-1077]
[Abad, A. C. & Ranasinghe, A. Visuotactile Sensors With Emphasis on GelSight Sensor: A Review IEEE Sensors Journal, 2020, 20, 7628-7638]
Credit:
[Yuan, W.; Dong, S. & Adelson, E. H. GelSight: High-Resolution Robot Tactile Sensors for Estimating Geometry and Force Sensors, Multidisciplinary Digital Publishing Institute, 2017]
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
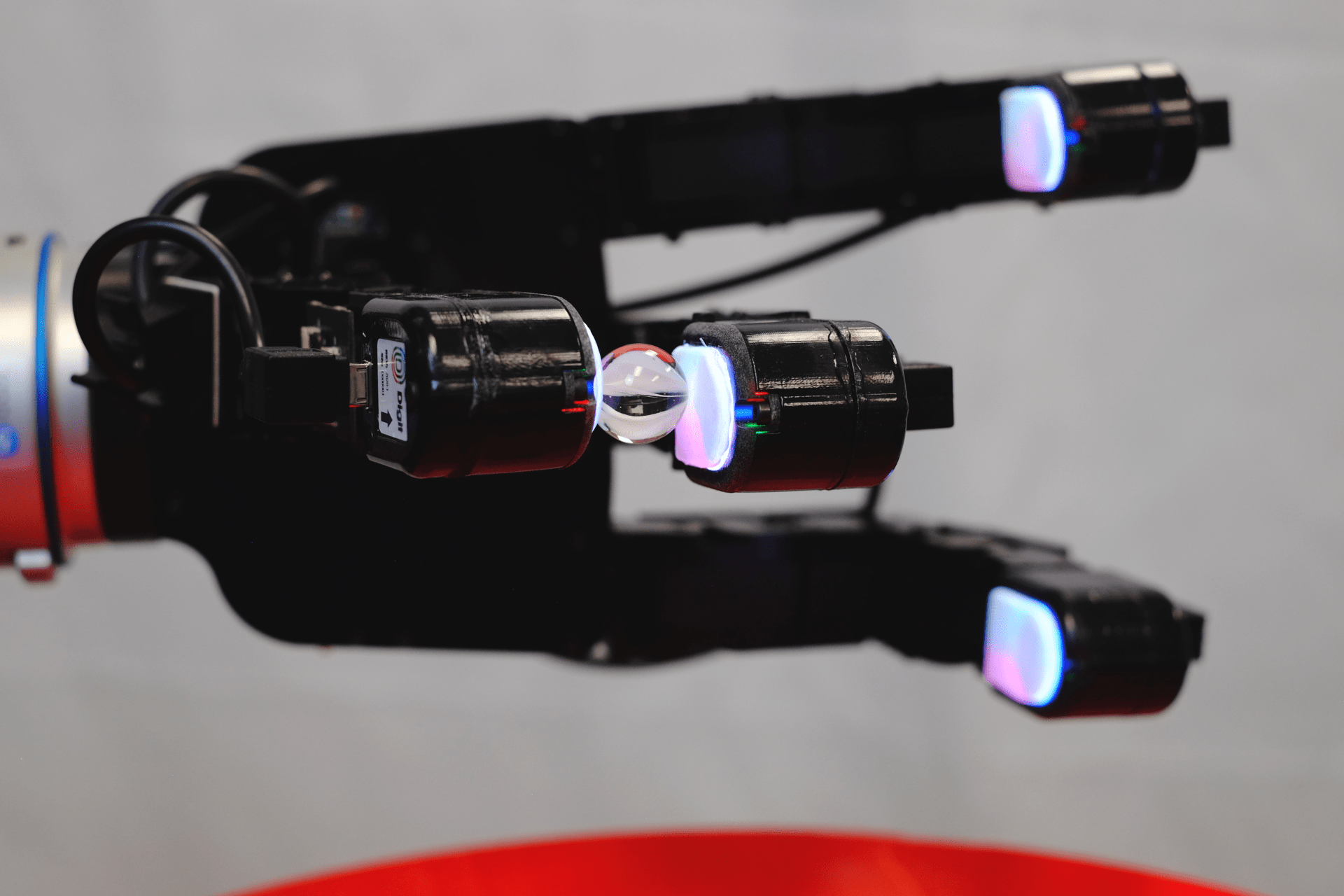
Funk, N.; Helmut, E.; Chalvatzaki, G.; Calandra, R. & Peters, J.
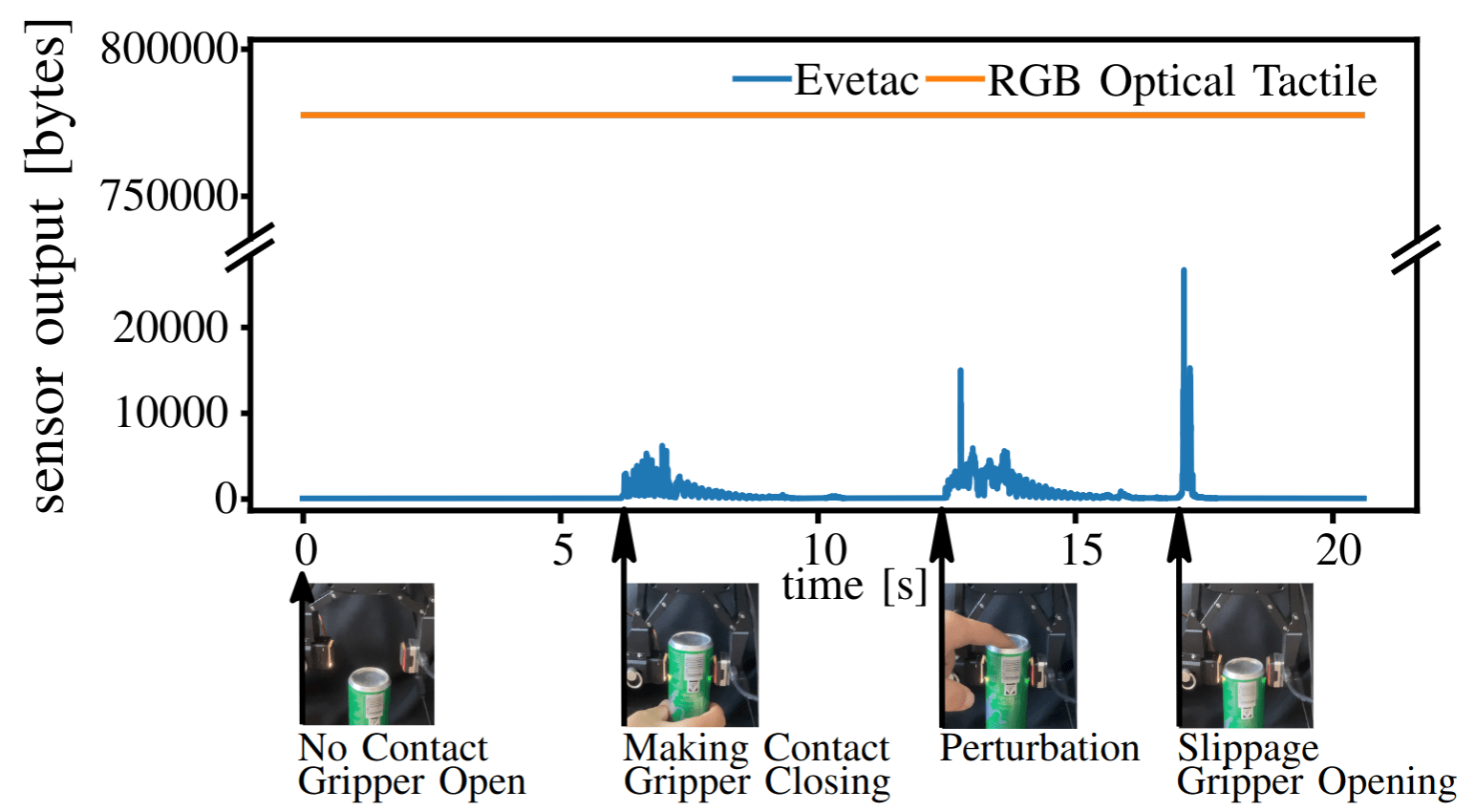
Evetac: An Event-based Optical Tactile Sensor for Robotic Manipulation
Under Review, 2023 https://arxiv.org/abs/2312.01236
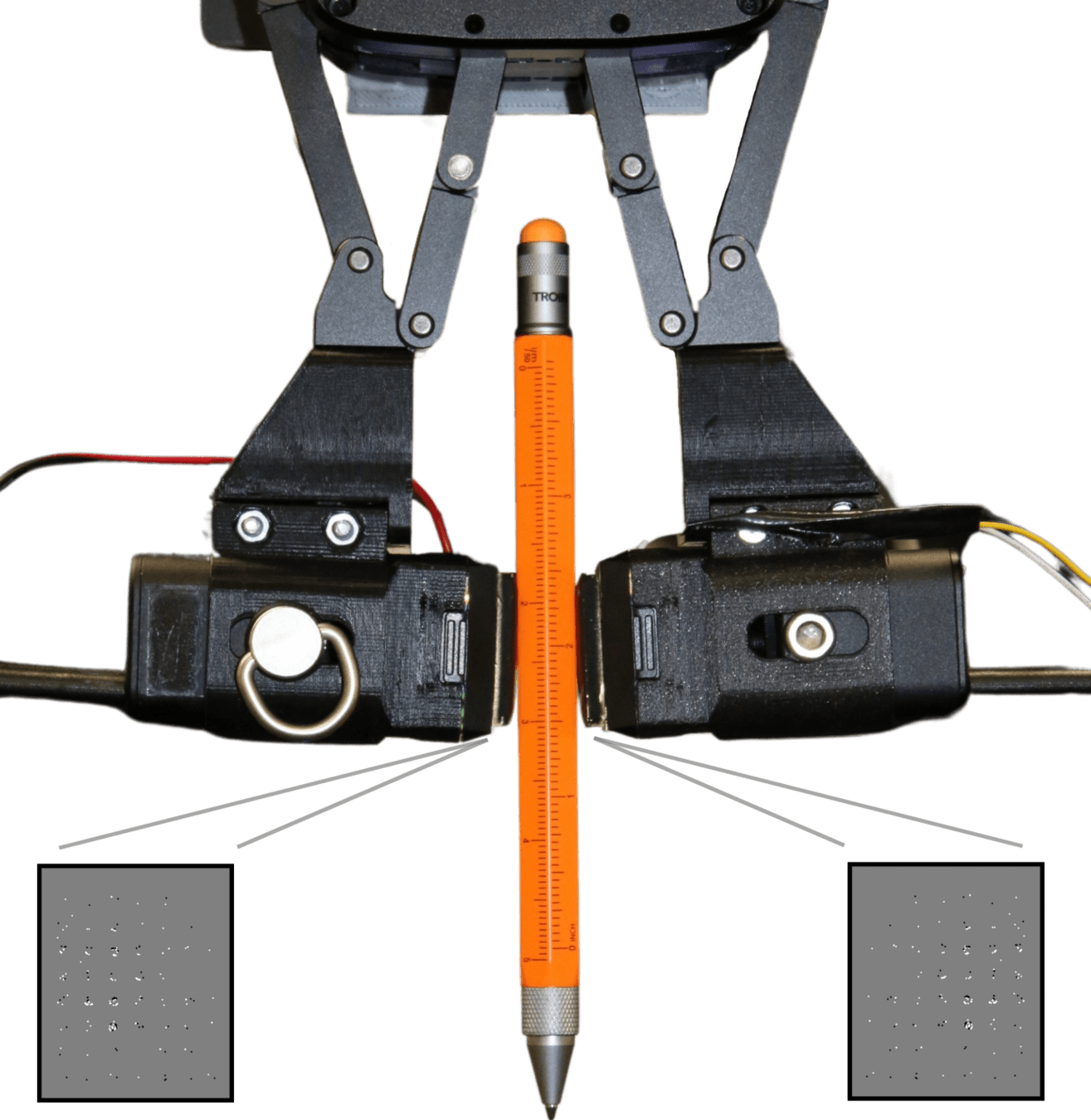
Funk, N.; Helmut, E.; Chalvatzaki, G.; Calandra, R. & Peters, J.
Evetac: An Event-based Optical Tactile Sensor for Robotic Manipulation
Under Review, 2023 https://arxiv.org/abs/2312.01236
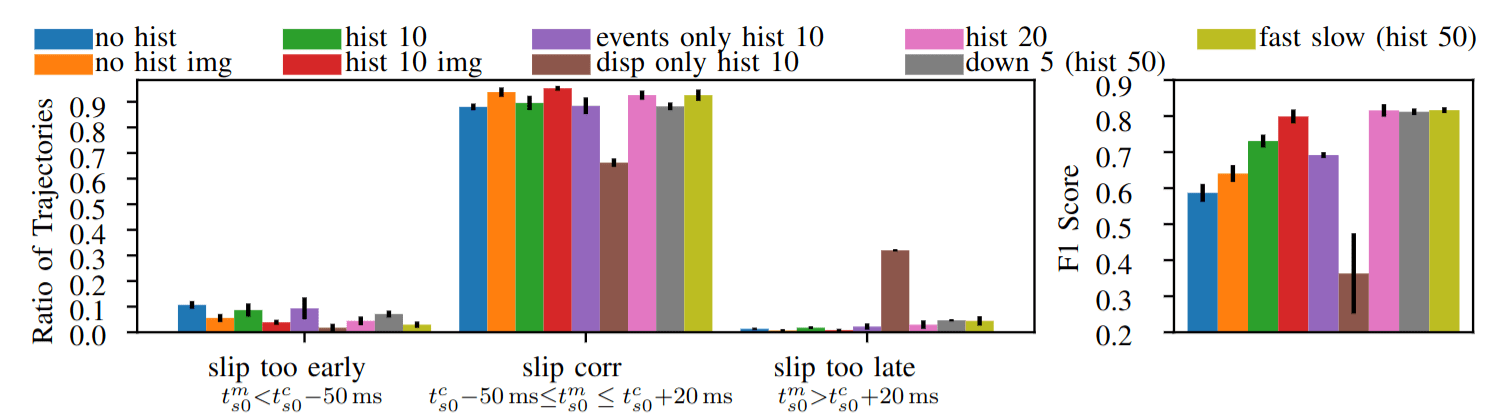
Funk, N.; Helmut, E.; Chalvatzaki, G.; Calandra, R. & Peters, J.
Evetac: An Event-based Optical Tactile Sensor for Robotic Manipulation
Under Review, 2023 https://arxiv.org/abs/2312.01236
Funk, N.; Helmut, E.; Chalvatzaki, G.; Calandra, R. & Peters, J.
Evetac: An Event-based Optical Tactile Sensor for Robotic Manipulation
Under Review, 2023 https://arxiv.org/abs/2312.01236
12%
1.7% over
entire
trajectory
Padmanabha, A.; Ebert, F.; Tian, S.; Calandra, R.; Finn, C.; Levine, S.
OmniTact: A Multi-Directional High-Resolution Touch Sensor
IEEE International Conference on Robotics and Automation (ICRA) , 2020
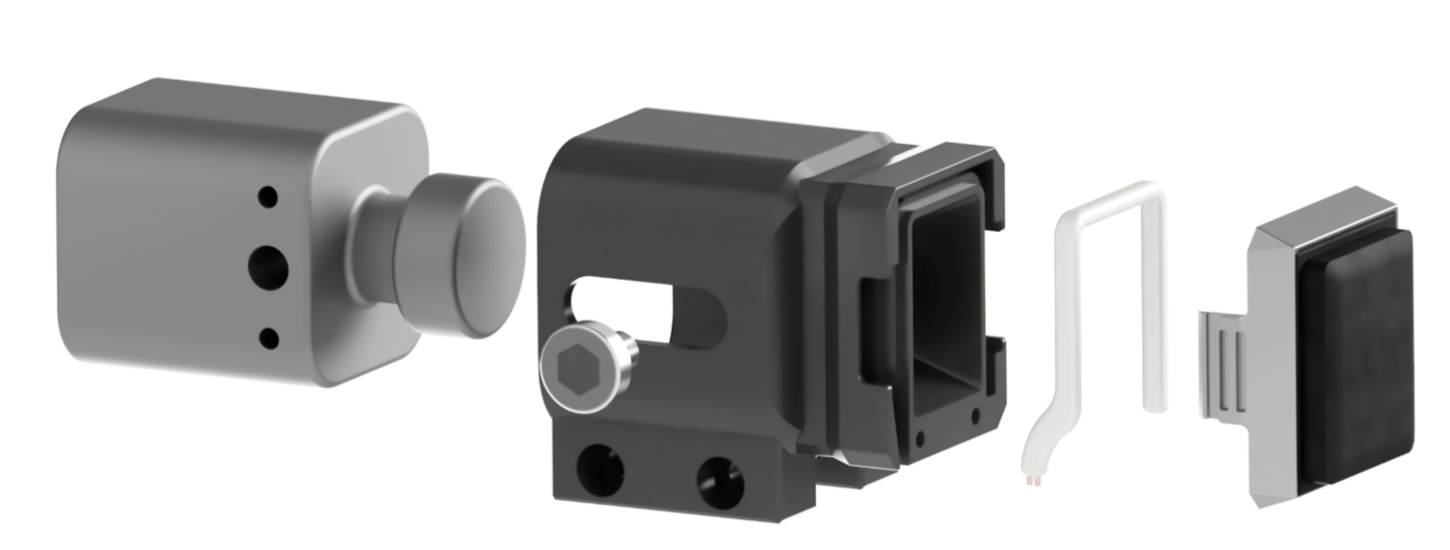
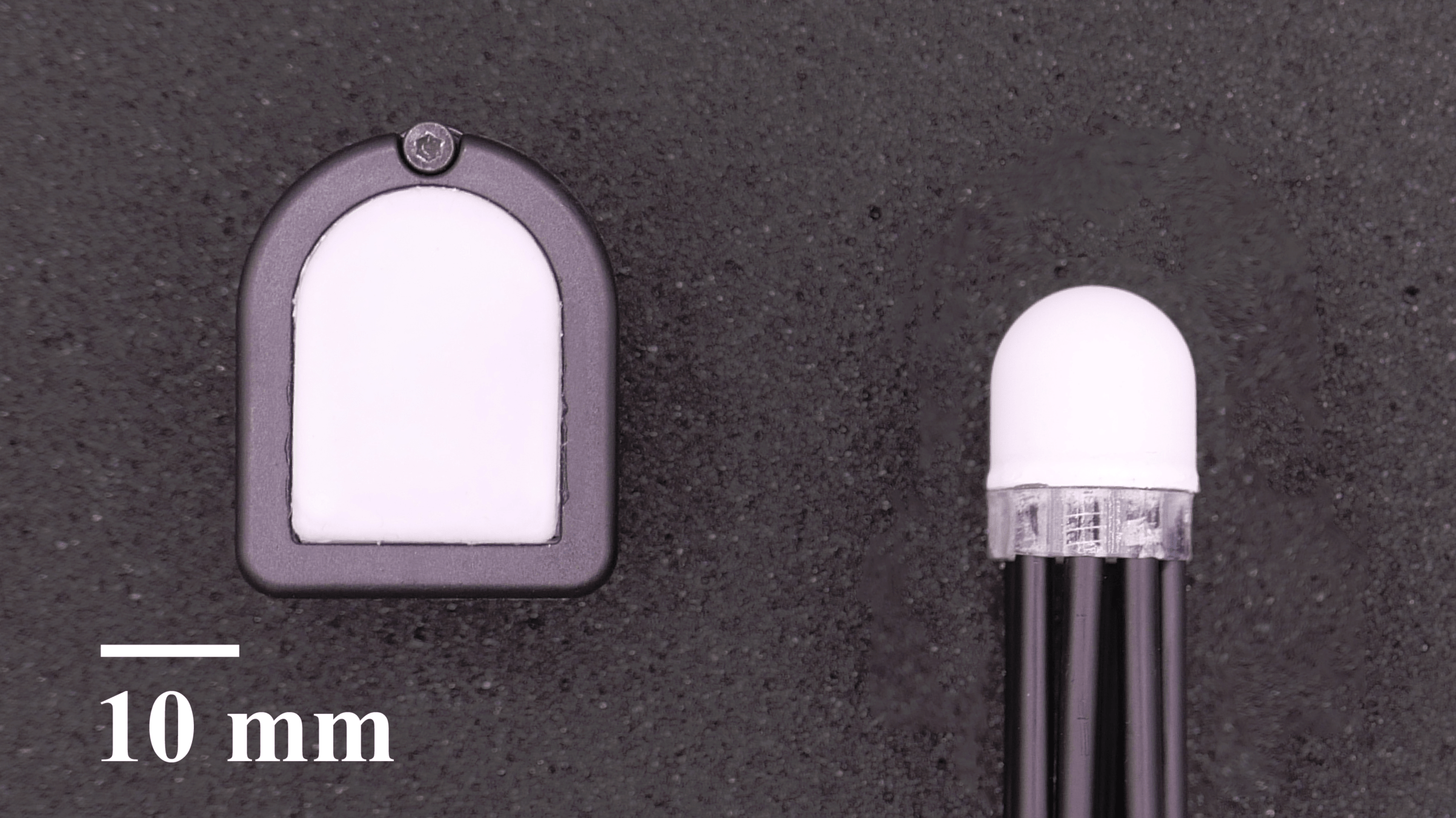
Two advantages:
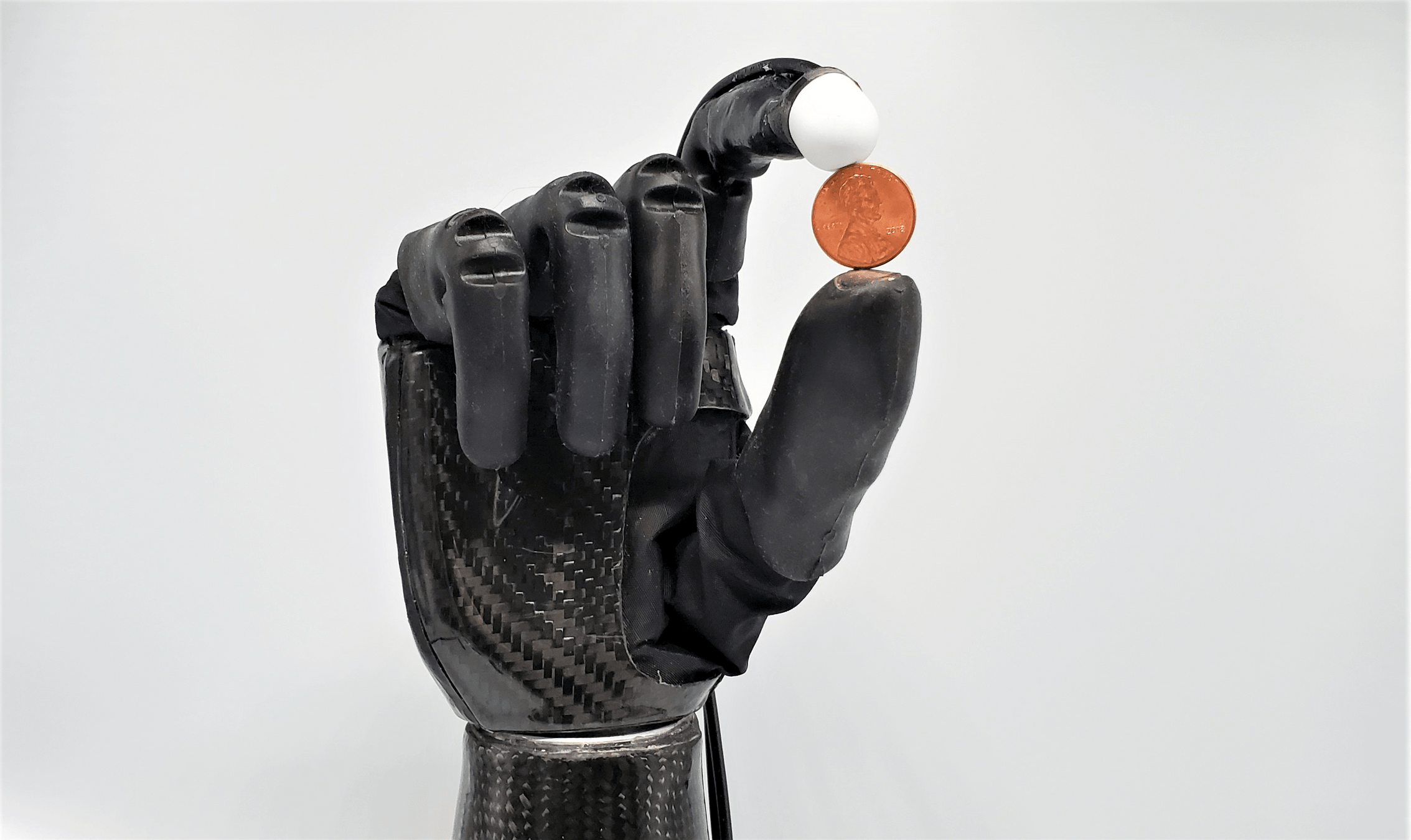
1) More compact form factor
2) Replaceable sensing element
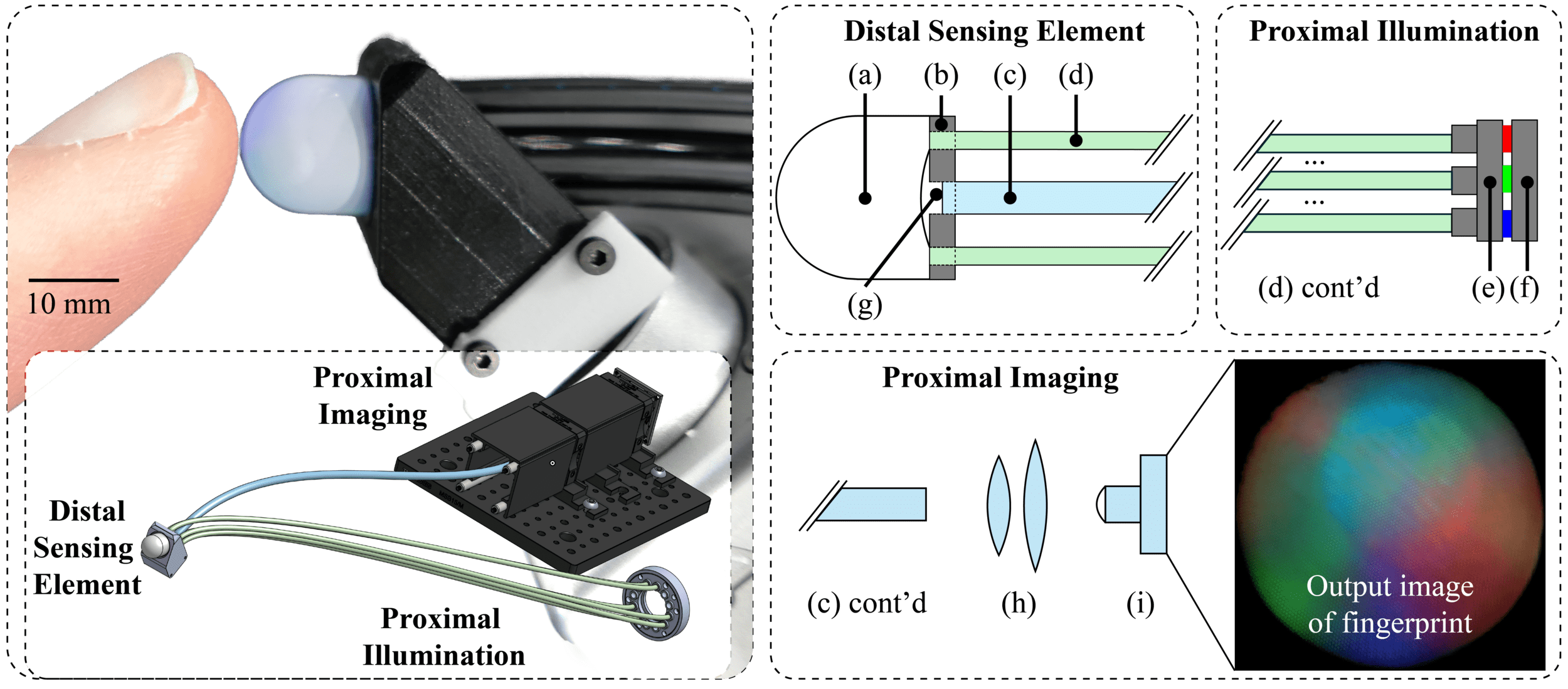
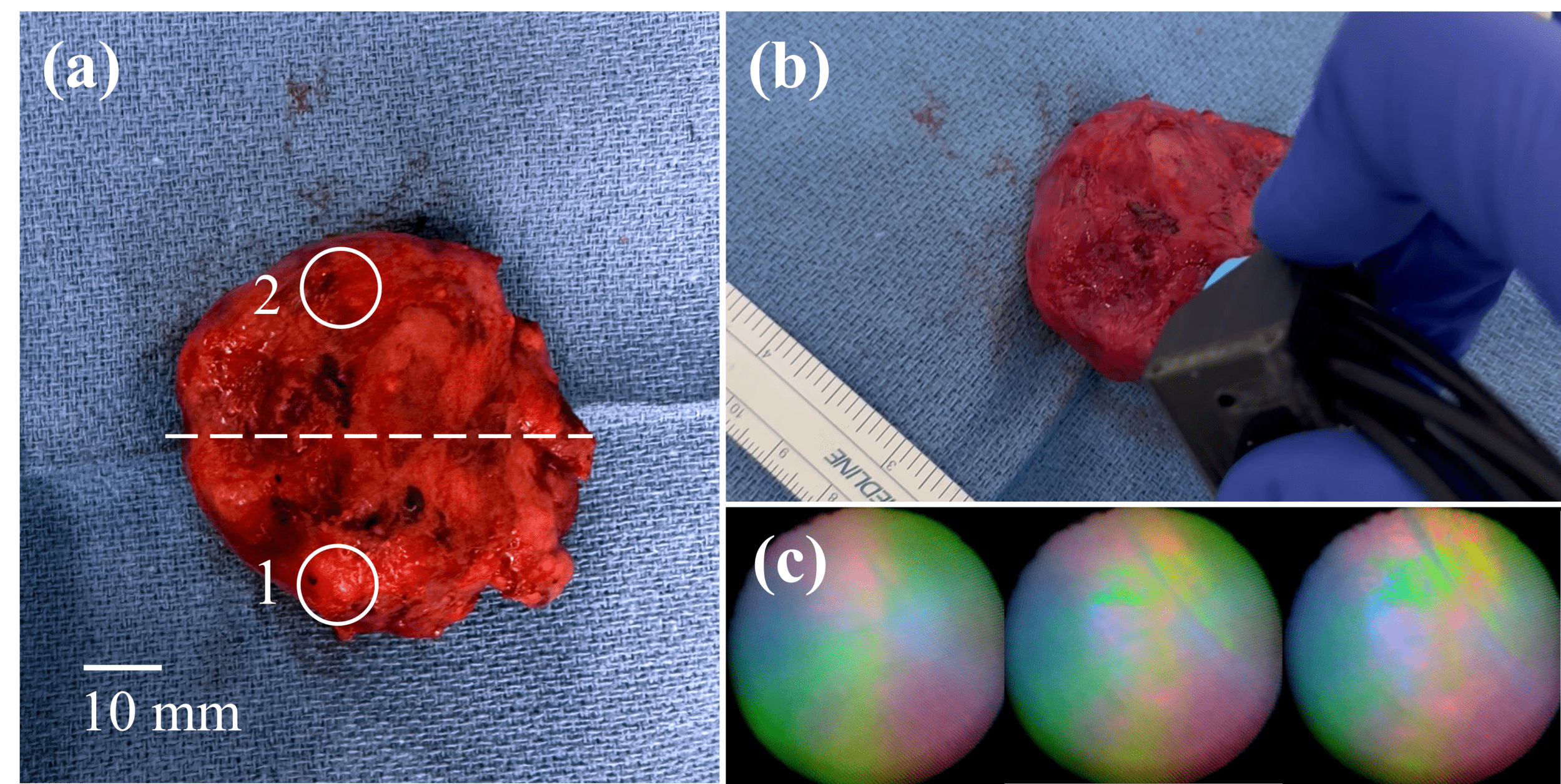
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Under Review, 2024 https://arxiv.org/abs/2403.05500
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Under Review, 2024 https://arxiv.org/abs/2403.05500
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Under Review, 2024 https://arxiv.org/abs/2403.05500
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Under Review, 2024 https://arxiv.org/abs/2403.05500
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Under Review, 2024 https://arxiv.org/abs/2403.05500
Di, J.; Dugonjic, Z.; Fu, W.; Wu, T.; Mercado, R.; Sawyer, K.; Most, V. R.; Kammerer, G.; Speidel, S.; Fan, R. E.; Sonn, G.; Cutkosky, M. R.; Lambeta, M. & Calandra, R.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Under Review, 2024 https://arxiv.org/abs/2403.05500
Cancer
No Cancer
Some of the open questions:
Very limited literature about computational processing of touch sensing
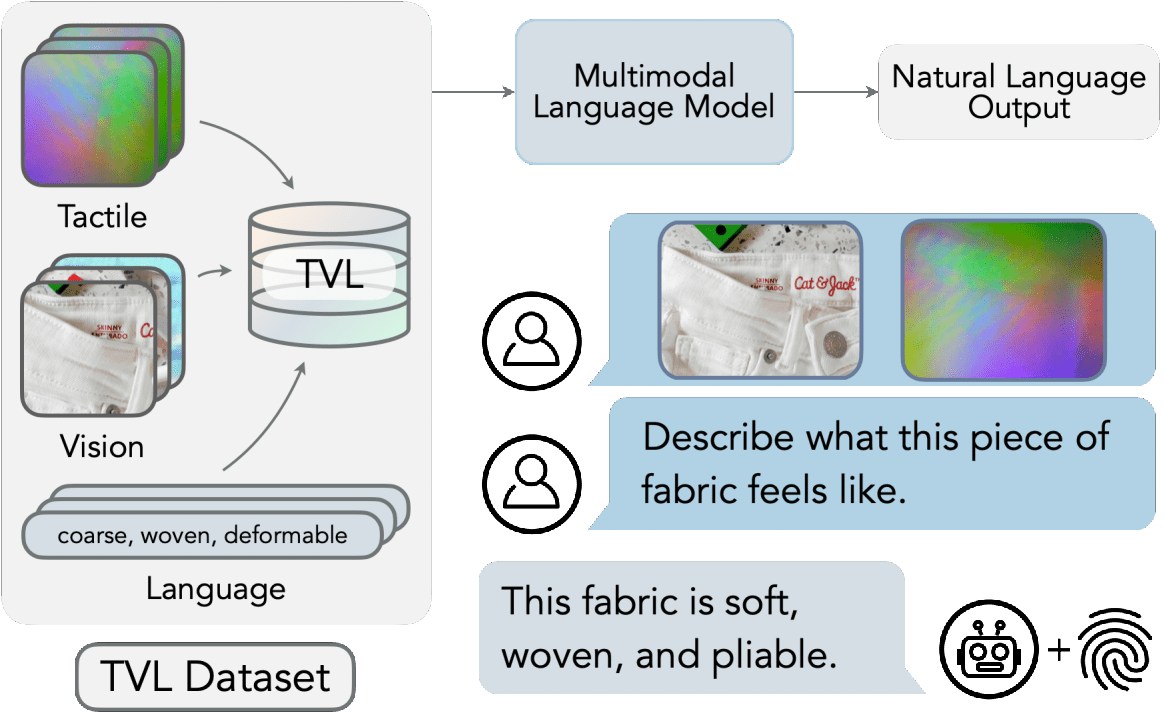
Fu, L.; Datta, G.; Huang, H.; Panitch, W. C.-H.; Drake, J.; Ortiz, J.; Mukadam, M.; Lambeta, M.; Calandra, R. & Goldberg, K.
A Touch, Vision, and Language Dataset for Multimodal Alignment
Accepted to ICML 2024 https://arxiv.org/abs/2402.13232
Suresh, S.; Qi, H.; Wu, T.; Fan, T.; Pineda, L.; Lambeta, M.; Malik, J.; Kalakrishnan, M.; Calandra, R.; Kaess, M.; Ortiz, J. & Mukadam, M.
Neural feels with neural fields: Visuo-tactile perception for in-hand manipulation
Under Review, 2023 https://arxiv.org/abs/2312.13469
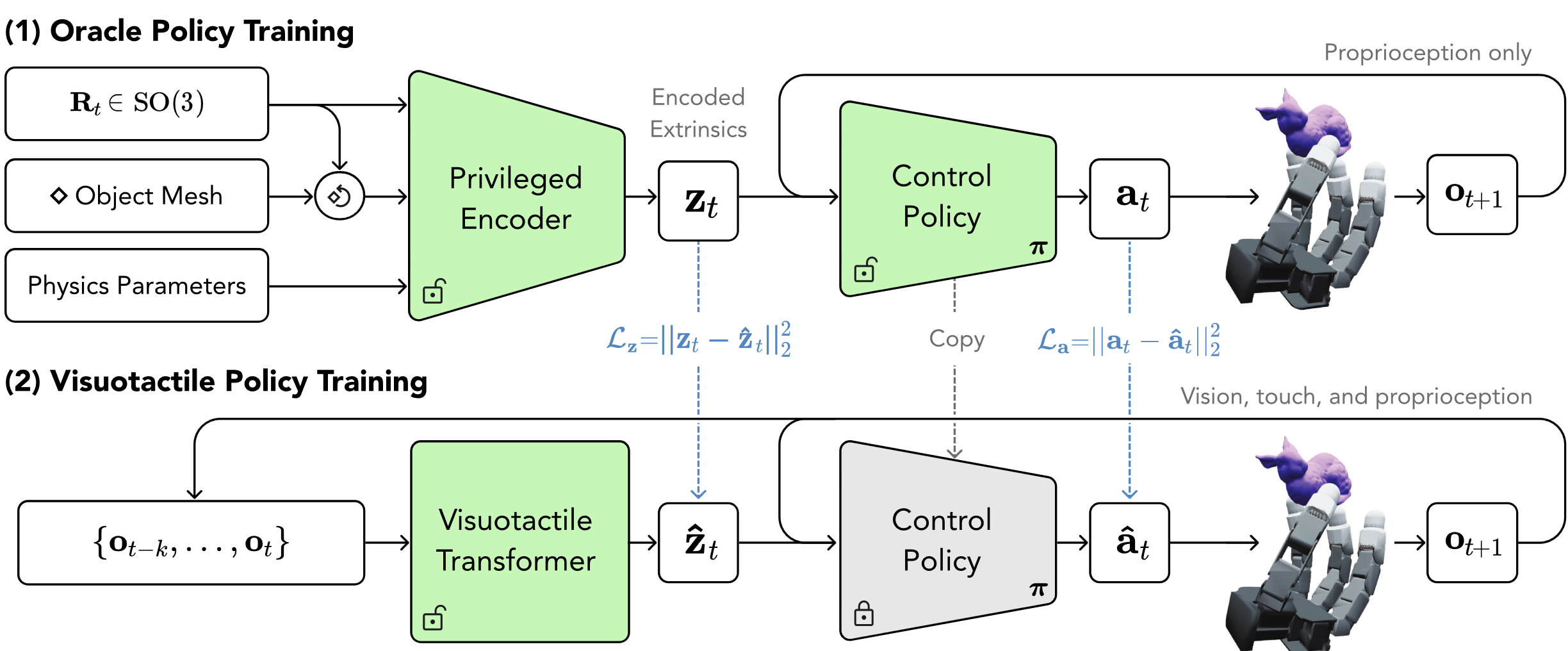
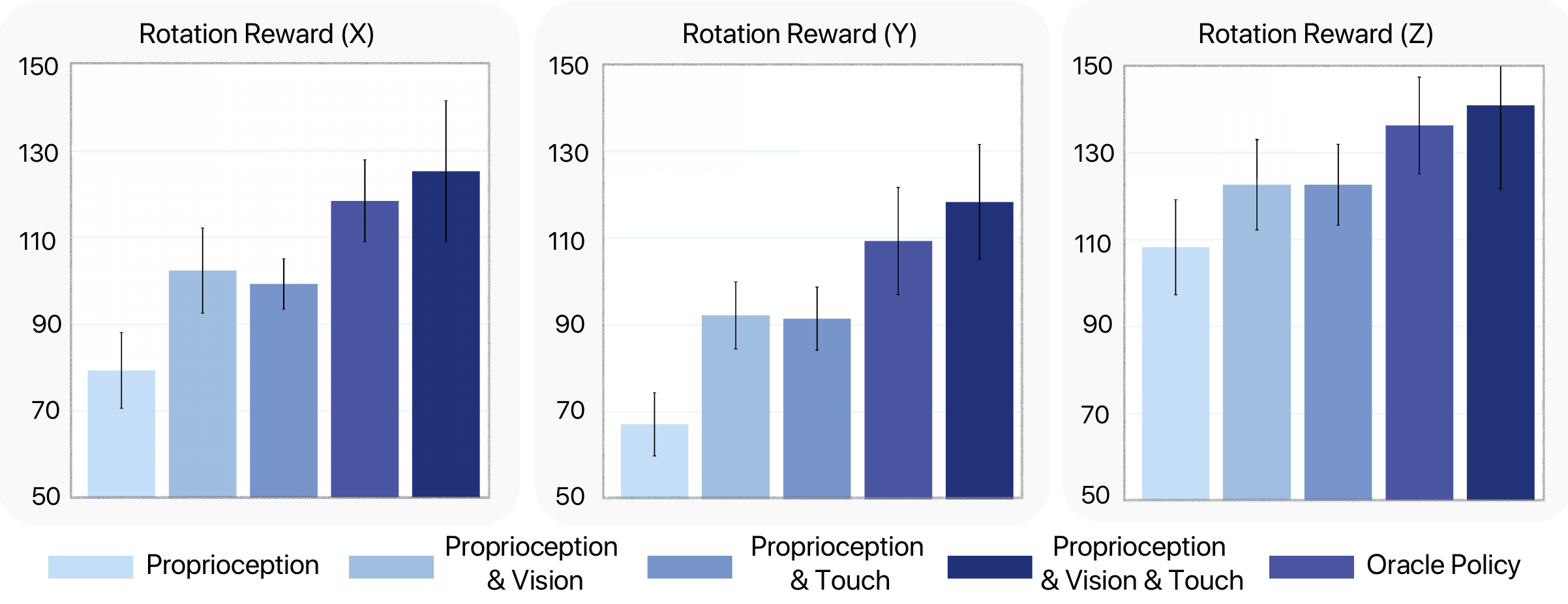
Qi, Haozhi, Brent Yi, Sudharshan Suresh, Mike Lambeta, Yi Ma, Roberto Calandra, and Jitendra Malik.
General In-Hand Object Rotation with Vision and Touch.
Conference on Robot Learning (CORL). 2023 https://arxiv.org/abs/2309.09979
Qi, Haozhi, Brent Yi, Sudharshan Suresh, Mike Lambeta, Yi Ma, Roberto Calandra, and Jitendra Malik.
General In-Hand Object Rotation with Vision and Touch.
Conference on Robot Learning (CORL). 2023 https://arxiv.org/abs/2309.09979
Qi, Haozhi, Brent Yi, Sudharshan Suresh, Mike Lambeta, Yi Ma, Roberto Calandra, and Jitendra Malik.
General In-Hand Object Rotation with Vision and Touch.
Conference on Robot Learning (CORL). 2023 https://arxiv.org/abs/2309.09979
Thank you!
Wang, S.; Lambeta, M.; Chou, L. & Calandra, R.
TACTO: A Fast, Flexible and Open-source Simulator for High-Resolution Vision-based Tactile Sensors
IEEE Robotics and Automation Letters (RA-L), 2022, 7, 3930-3937, Online: https://arxiv.org/abs/2012.08456
Qi, H.; Kumar, A.; Calandra, R.; Ma, Y. & Malik J.
In-Hand Object Rotation via Rapid Motor Adaptation
Conference on Robot Learning (CORL), 2022, https://arxiv.org/abs/2210.04887
By Roberto Calandra




