































Roberto Calandra PRO
Full Professor at TU Dresden. Head of the LASR Lab. Working in AI, Robotics and Touch Sensing.
Roberto Calandra
Workshop @IEEE World Haptics Conference - 10 July 2023
Learning, Adaptive Systems, and Robotics (LASR) Lab
From YouTube: https://www.youtube.com/watch?v=g0TaYhjpOfo
Machine Learning
Robotics
Touch
Sensing
Hardware
Software
In this talk
Standardization, and the creation of an ecosystem of tools
+ Applications
+ Community
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
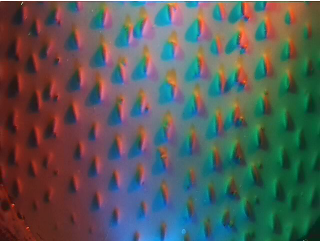
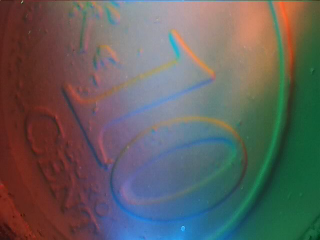
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
BioTac
DIGIT
~15,000 $
Cost
~15 $*
Resolution
29
taxels
307,200
taxels
Mounted on multi-finger hands
Open-source
1000x
Higher resolution
1000x
Cheaper
* component cost for 1000 units, not including labor
Replicated in 20+ universities
Yet, it can still be challenging to manufacture a sensor without mechanical/electrical experience
Partnership with GelSight Inc. to commercialize DIGIT
Most widespread tactile sensor in robotics!
Part of Mitsubishi Electric RAISE (Robotics as an Intelligent Services Ecosystem)
Padmanabha, A.; Ebert, F.; Tian, S.; Calandra, R.; Finn, C.; Levine, S.
OmniTact: A Multi-Directional High-Resolution Touch Sensor
IEEE International Conference on Robotics and Automation (ICRA) , 2020
Some of the open questions:
Very limited literature about computational processing of touch sensing
Goal: Create the equivalent of OpenCV for Touch
Lambeta, M.; Xu, H.; Xu, J.; Chou, P.-W.; Wang, S.; Darrell, T. & Calandra, R.
PyTouch: A Machine Learning Library for Touch Processing
IEEE International Conference on Robotics and Automation (ICRA), 2021, Online: https://arxiv.org/abs/2105.12791
Lambeta, M.; Xu, H.; Xu, J.; Chou, P.-W.; Wang, S.; Darrell, T. & Calandra, R.
PyTouch: A Machine Learning Library for Touch Processing
IEEE International Conference on Robotics and Automation (ICRA), 2021, Online: https://arxiv.org/abs/2105.12791
Kerr, J.; Huang, H.; Wilcox, A.; Hoque, R.; Ichnowski, J.; Calandra, R. & Goldberg, K.
Self-Supervised Visuo-Tactile Pretraining to Locate and Follow Garment Features
Accepted to RSS 2023, Online: https://arxiv.org/pdf/2209.13042
Predicting Grasp Stability
[Calandra et al. 2017]
Learning how to (Re)Grasp
[Calandra et al. 2018]
Active Tactile Exploration
[Yi at al. 2016]
3D Reconstruction from Vision and Touch
[Smith et al. 2020; Smith et al. 2021]
Identify Objects from Touch
[Lin et al. 2019]
Learning to Play Piano from Touch
[Xu at al. 2022]
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Qi, H.; Kumar, A.; Calandra, R.; Ma, Y. & Malik J.
In-Hand Object Rotation via Rapid Motor Adaptation
Conference on Robot Learning (CORL), 2022, https://arxiv.org/abs/2210.04887
Thank you!
DIGIT
TACTO
PyTouch
By Roberto Calandra
[IEEE World Haptics Conference- 26 May 2023] Touch is a crucial sensor modality in both humans and robots. Recent advances in tactile sensing hardware have resulted -- for the first time -- in the availability of mass-produced, high-resolution, inexpensive, and reliable tactile sensors. In this talk, I will argue for the importance of creating a new computational field of "Touch processing" dedicated to the processing and understanding of touch, similarly to what computer vision is for vision. This new field will present significant challenges both in terms of research and engineering. To start addressing some of these challenges, I will introduce our open-source ecosystem dedicated to touch sensing research. Finally, I will present some applications of touch in robotics and discuss other future applications.




