












russtedrake PRO
Roboticist at MIT and TRI
Tobia Marcucci, Jack Umenberger, Pablo Parrilo, and Russ Tedrake
Follow live at https://slides.com/russtedrake/brc2020/live
(or later at https://slides.com/russtedrake/brc2020)
Background
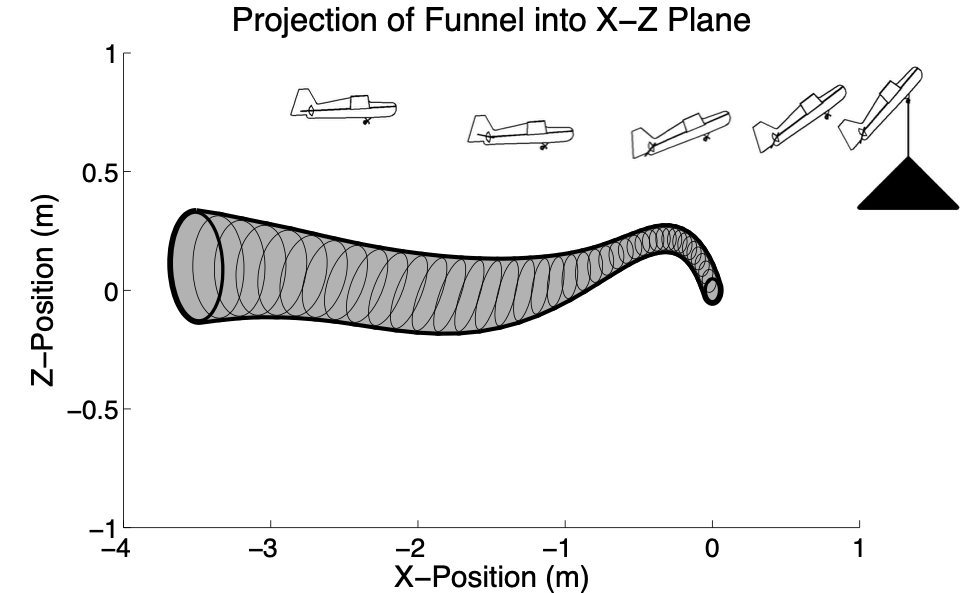
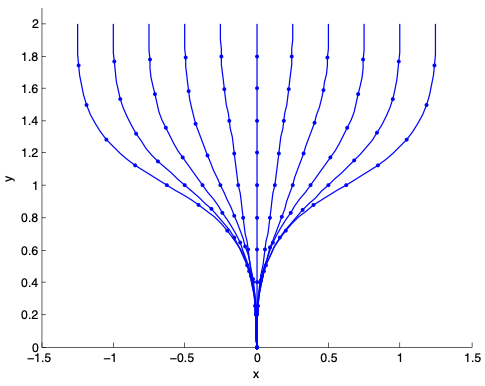
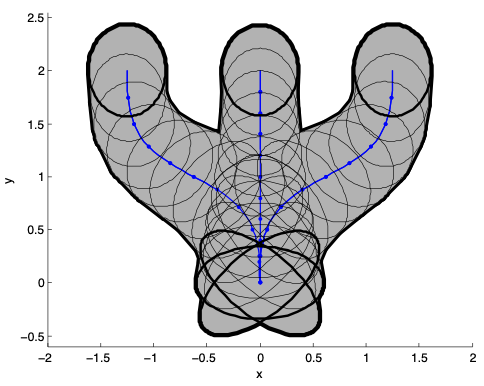
Funnel libraries
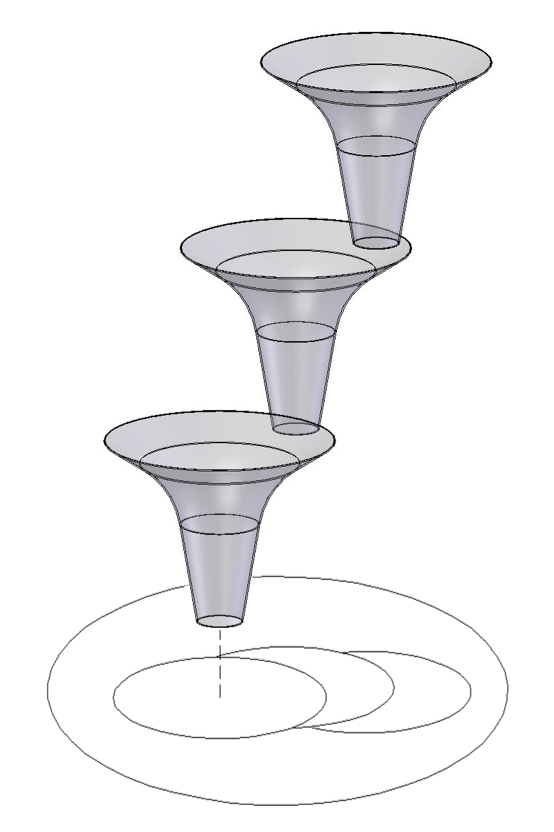
Sequential composition
... at runtime
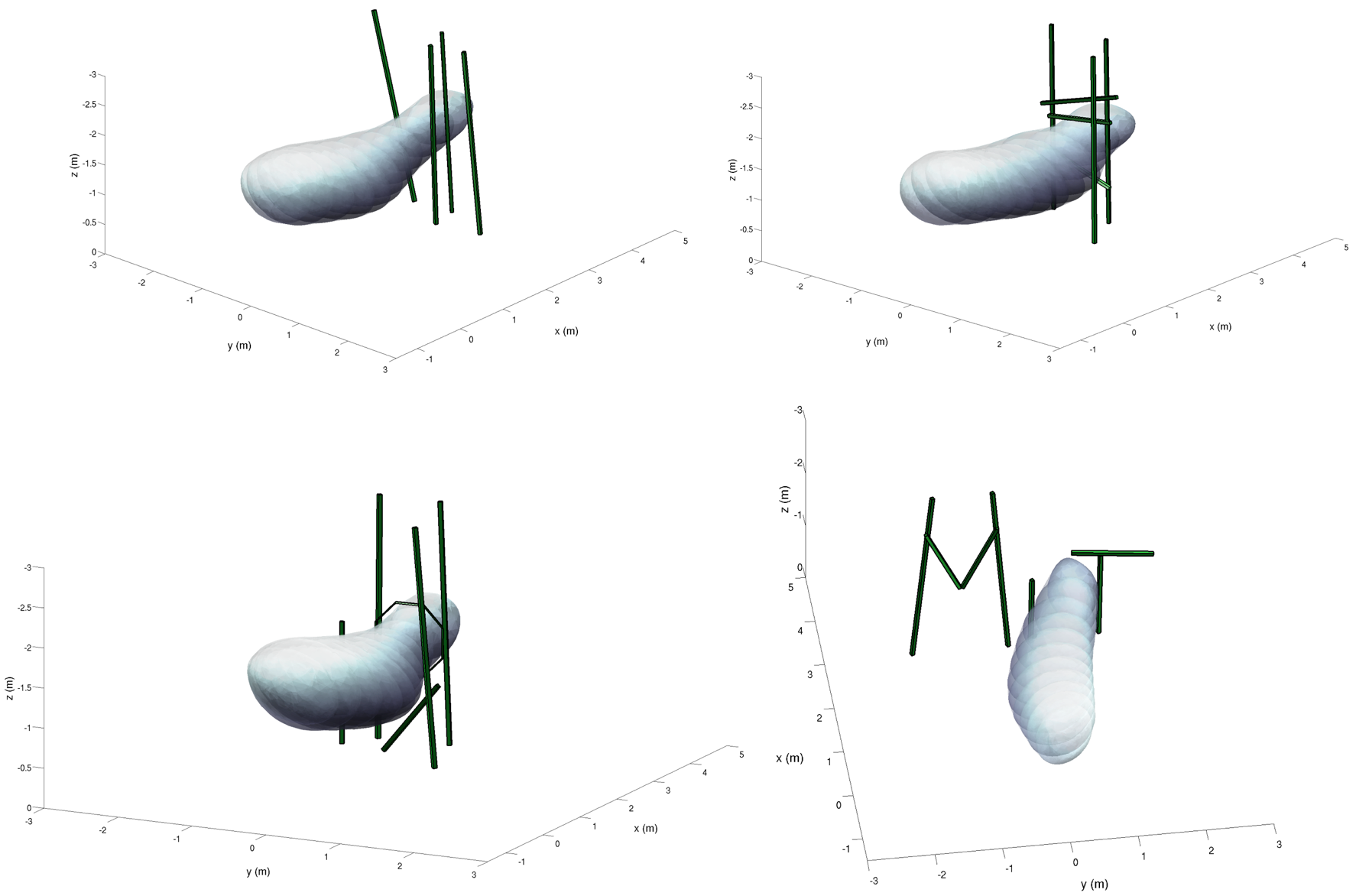
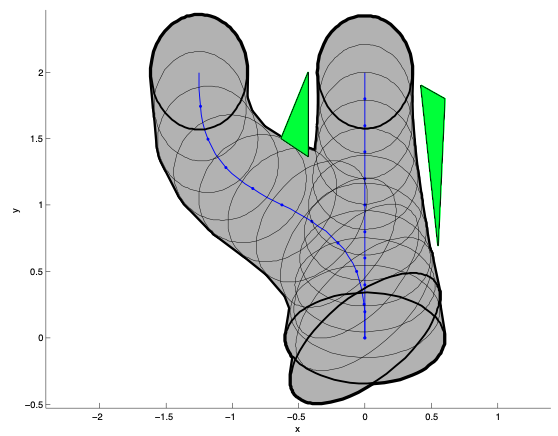
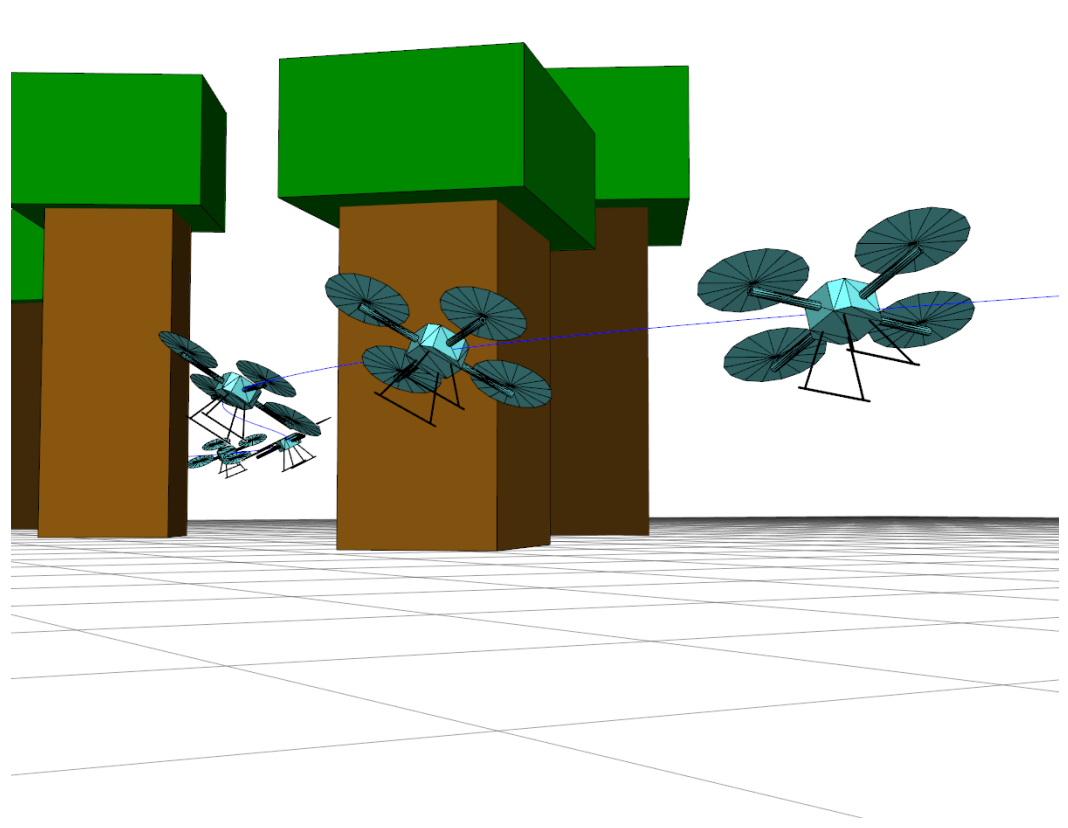
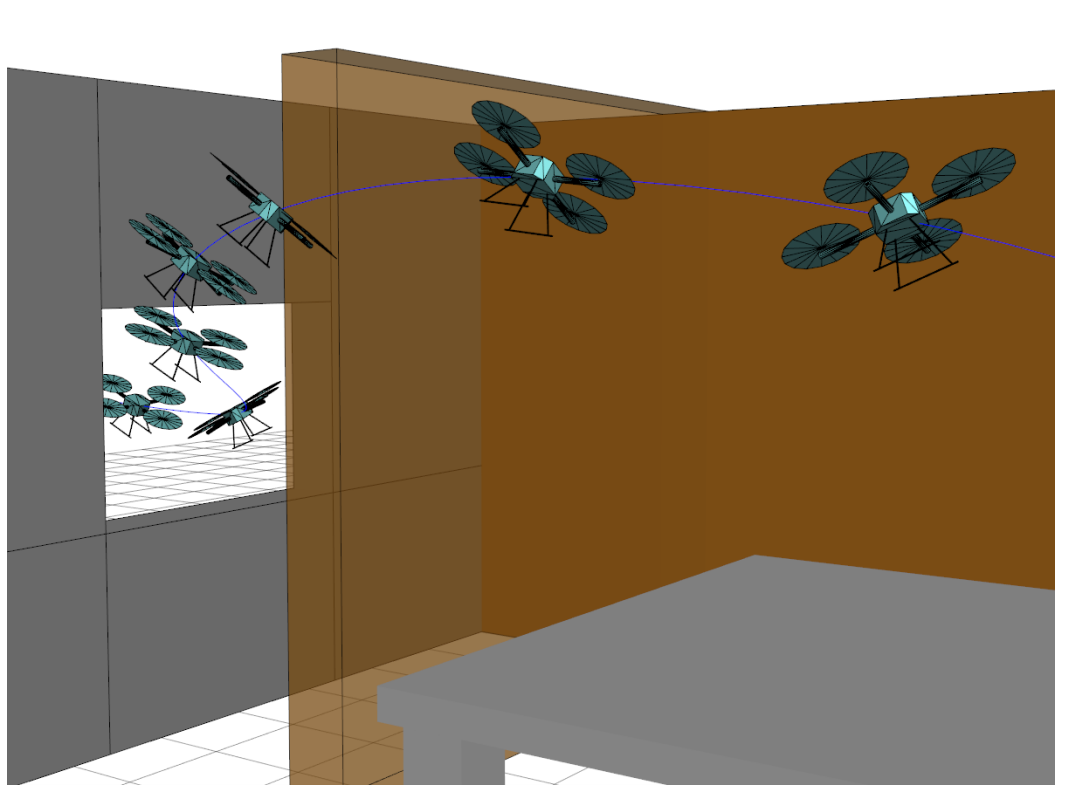
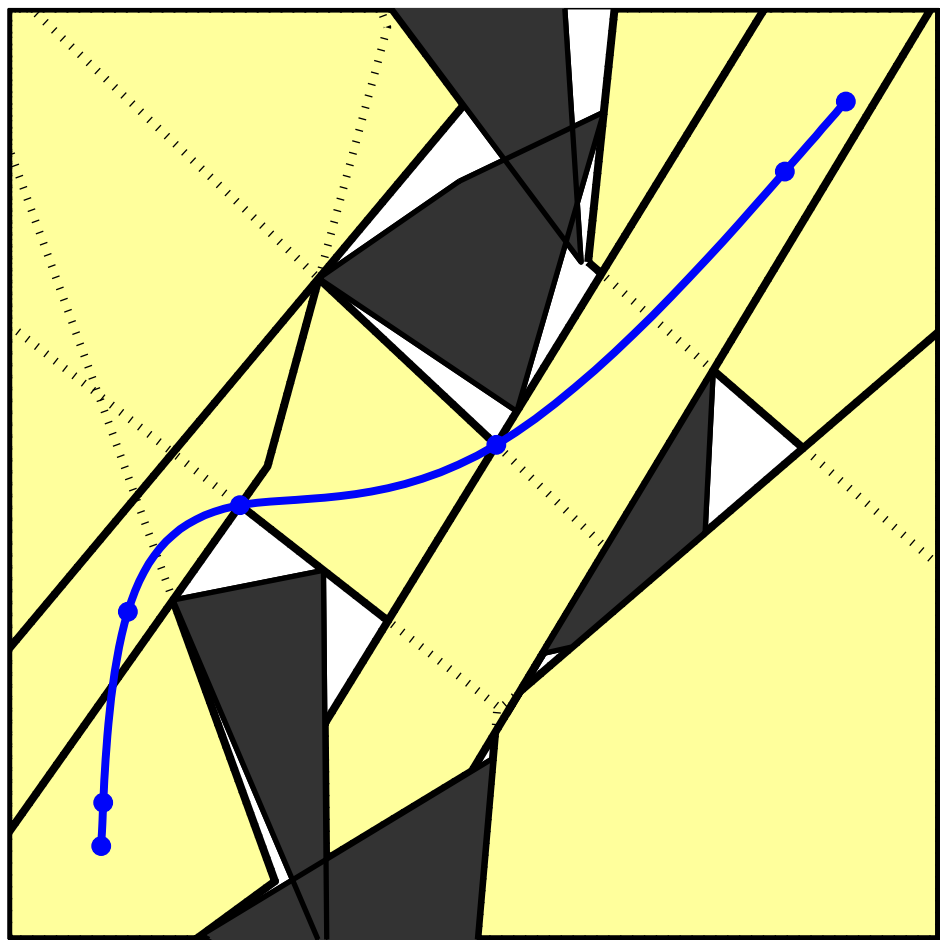
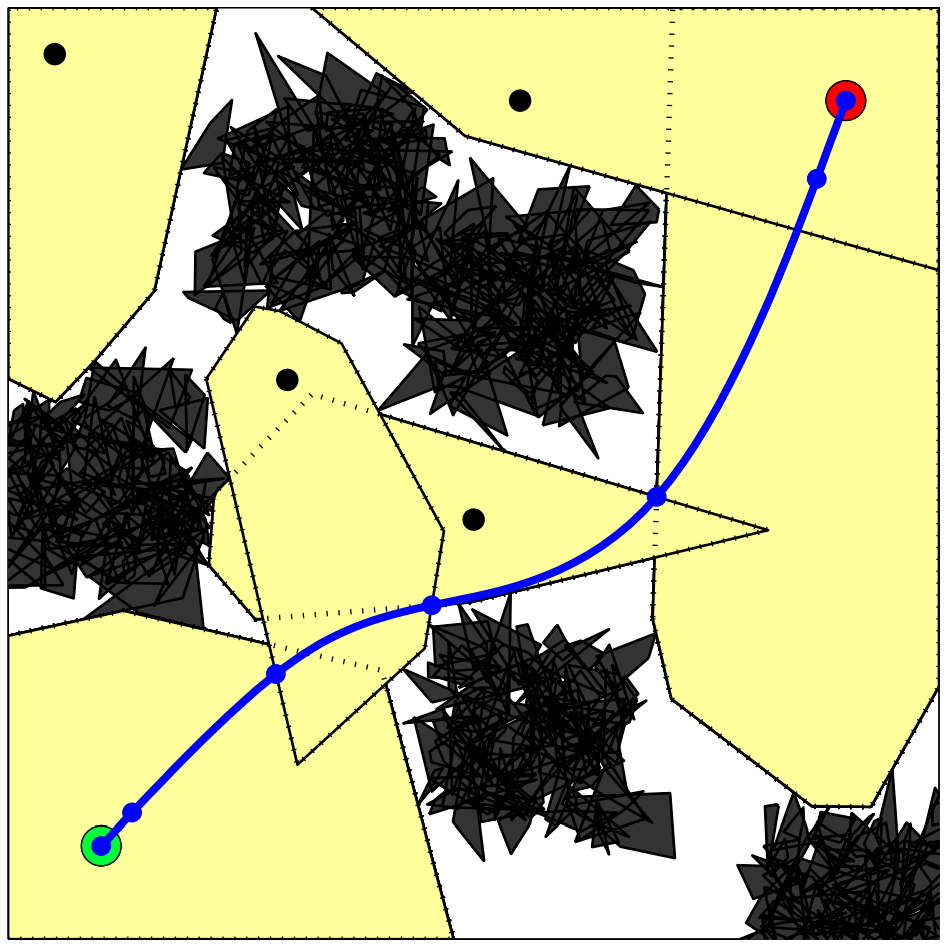
Collision-free planning with dynamic constraints
IRIS (Fast approximate convex segmentation)
At the start of this project
Deep dive
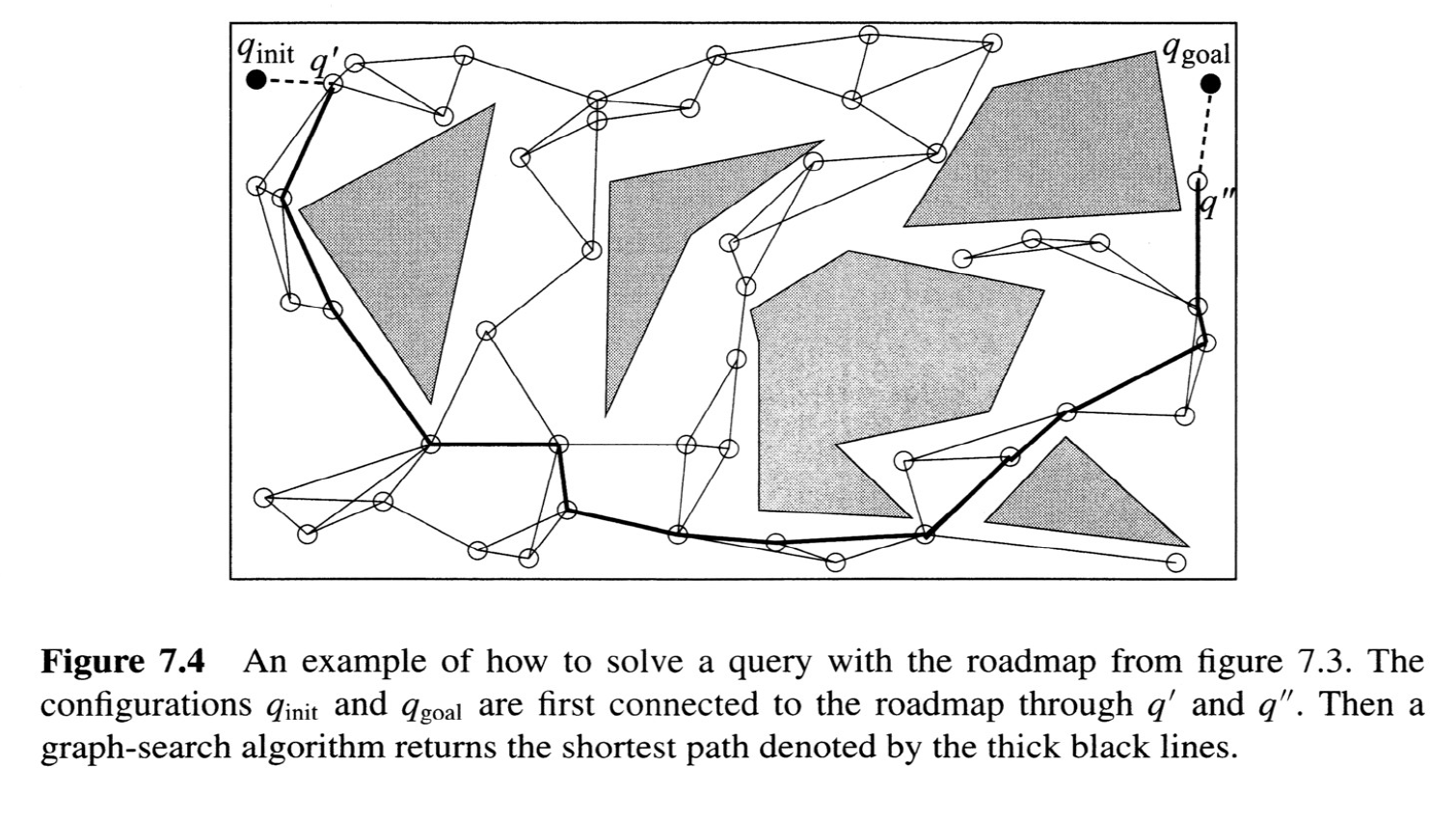
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
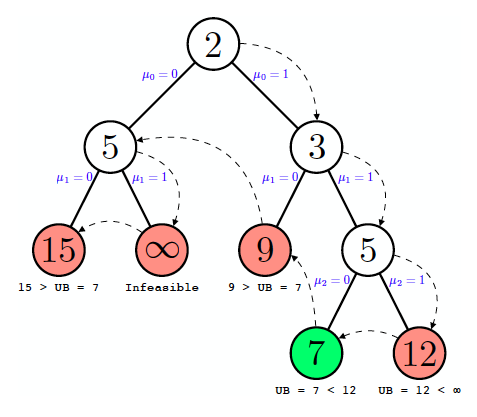
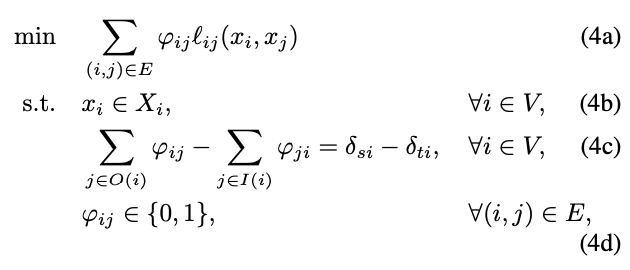
Find the shortest path \[ \min_P \min_{(x_i)_{i \in P}} \sum_{(i,j) \in P} \ell(x_i,x_j).\]
Introduce \(\varphi_{ij} \in \{0,1\}\) per edge \((i,j) \in E\).
\(\varphi_{ij} = 1\) if the edge \((i,j)\) in shortest path, otherwise \(\varphi_{ij} = 0\).
Use convex hull reformulation + perspective functions to make this convex.
Remarks:
MICP solution
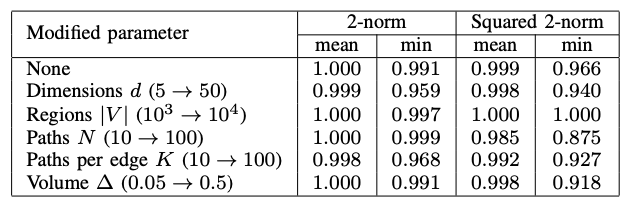
Convex relaxation from previous approaches
Convex relaxation from our approach
is the convex relaxation. (it's tight!)
Finding the shortest path from A to B while avoiding polygonal obstacles (“Euclidean shortest path”):
Our approach:
Going forward...
Project Goal: Mathematical certificates (potentially probabilistic) for multi-vehicle planning/control in complex environments
Today:
By russtedrake
FY20 Flight Dynamics and Control Basic Research Challenge (BRC) Annual Program Review


