
















russtedrake PRO
Roboticist at MIT and TRI
Russ Tedrake
CSAIL Alliances Annual Meeting
May 25, 2023
Follow live at https://slides.com/d/mGiwCvo/live
(or later at https://slides.com/russtedrake/cap_2023)
"What's still hard for AI" by Kai-Fu Lee:
AI cannot create, conceptualize, or manage complex strategic planning.
AI cannot accomplish complex work that requires precise hand-eye coordination.
AI cannot deal with unknown and unstructured spaces, especially ones that it hasn’t observed.
AI cannot, unlike humans, feel or interact with empathy and compassion; therefore, it is unlikely that humans would opt for interacting with an apathetic robot for traditional communication services.
Kai-Fu's key axes of development:
http://personalrobotics.stanford.edu/
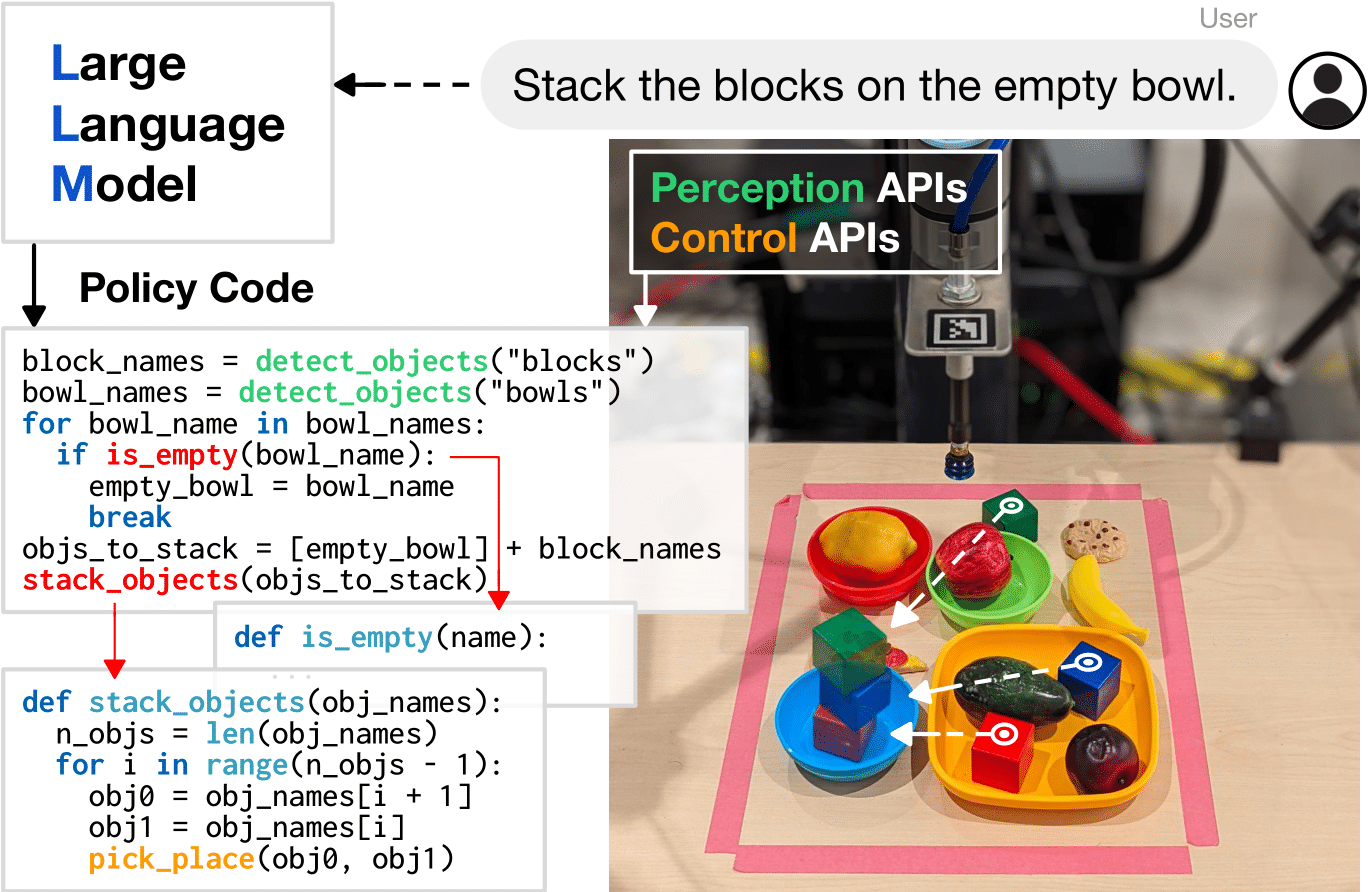
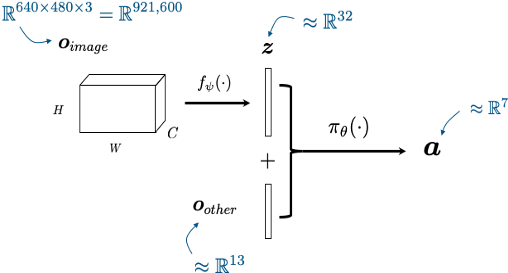
Key advance:
Levine*, Finn*, Darrel, Abbeel, JMLR 2016
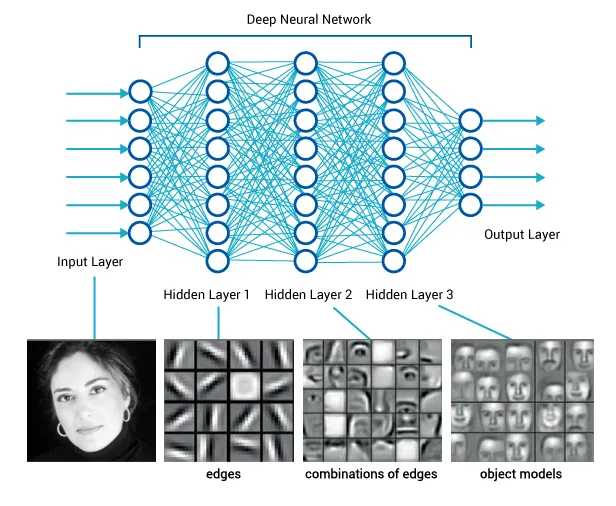
perception network
(often pre-trained)
policy network
other robot sensors
learned state representation
actions
OpenAI - Learning Dexterity
"And then … BC methods started to get good. Really good. So good that our best manipulation system today mostly uses BC ..."
Senior Director of Robotics at Google DeepMind
Andy Zeng's MIT CSL Seminar, April 4, 2022
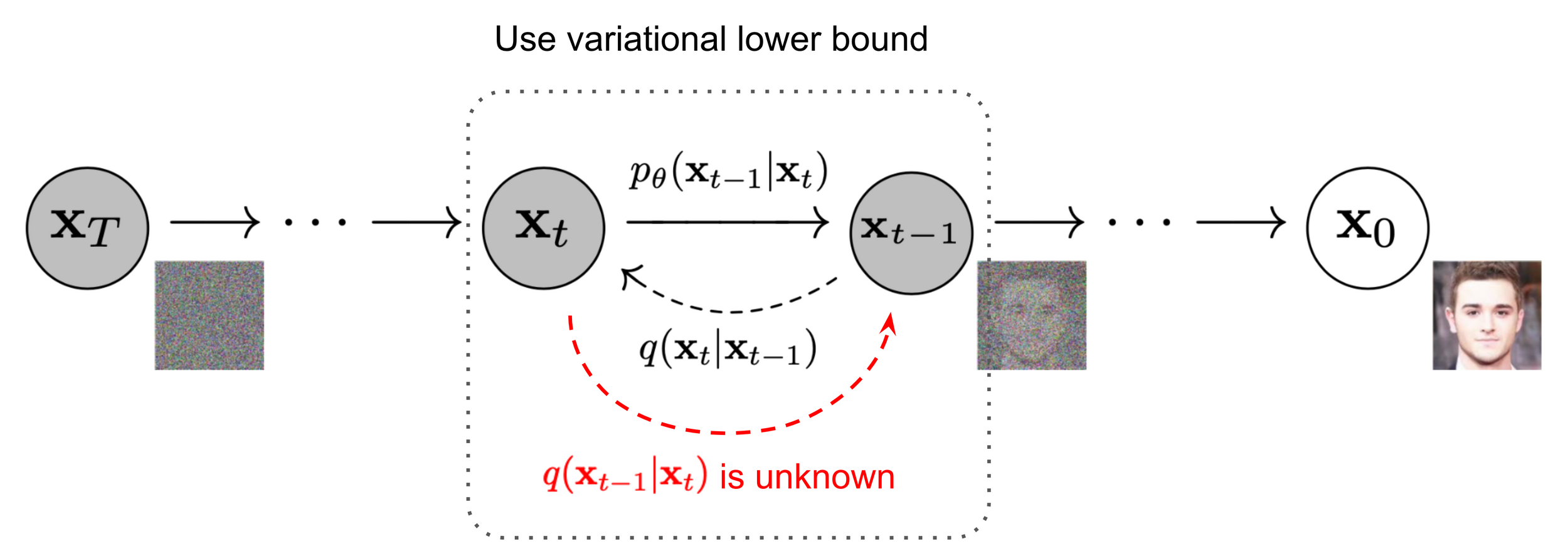
Image source: Ho et al. 2020
e.g. to deal with "multi-modal demonstrations"
ours
prior art
Andy Zeng's MIT CSL Seminar, April 4, 2022
Kinematic Trajectory Optimization
(for robot arms)
Note: The blue regions are not obstacles.
is the convex relaxation. (it's tight!)
Previous formulations were intractable; would have required \( 6.25 \times 10^6\) binaries.
Default playback at .25x
pip install drake
sudo apt install drakeAlready built in production build system at Amazon Robotics and many others.
http://manipulation.mit.edu
http://underactuated.mit.edu
By russtedrake
CMU RI Seminar


