








russtedrake PRO
Roboticist at MIT and TRI
MIT 6.881: Robotic Manipulation
Fall 2020, Lecture 21
Follow live at https://slides.com/russtedrake/fall20-lec21/live
(or later at https://slides.com/russtedrake/fall20-lec21)
Shadow robotics dexterous hand
Adroit Hand (as seen in MuJoCo)
Wonik Allegro hand
LUKE Radial Hand
DLR-HIT Hand II
Robonaut Hand
The "Salisbury Hand". @ 1982
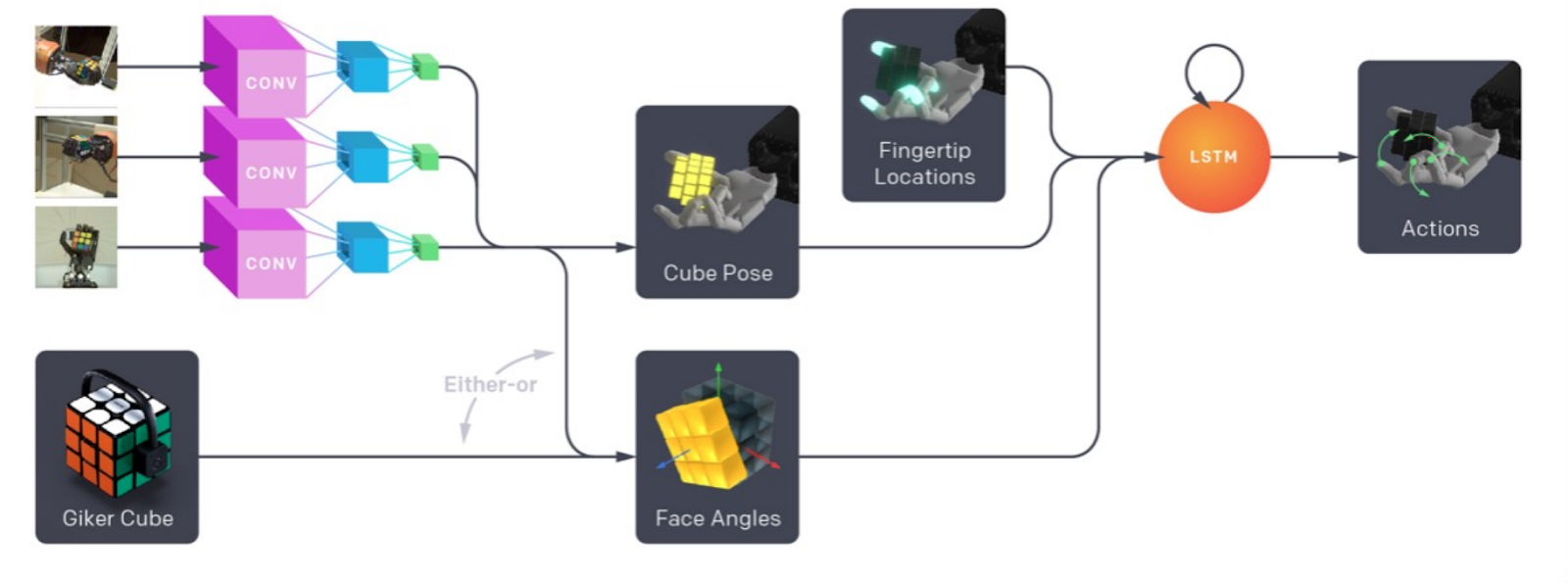
OpenAI - Learning Dexterity
“For the Rubik’s cube task, we use 8 × 8 = 64 NVIDIA V100 GPUs and 8 × 115 = 920 worker machines with 32 CPU cores each. … The cumulative amount of experience ... is roughly 13 thousand years.”
Solving Rubik's Cube with a Robot Hand by OpenAI, arXiv:1910.07113
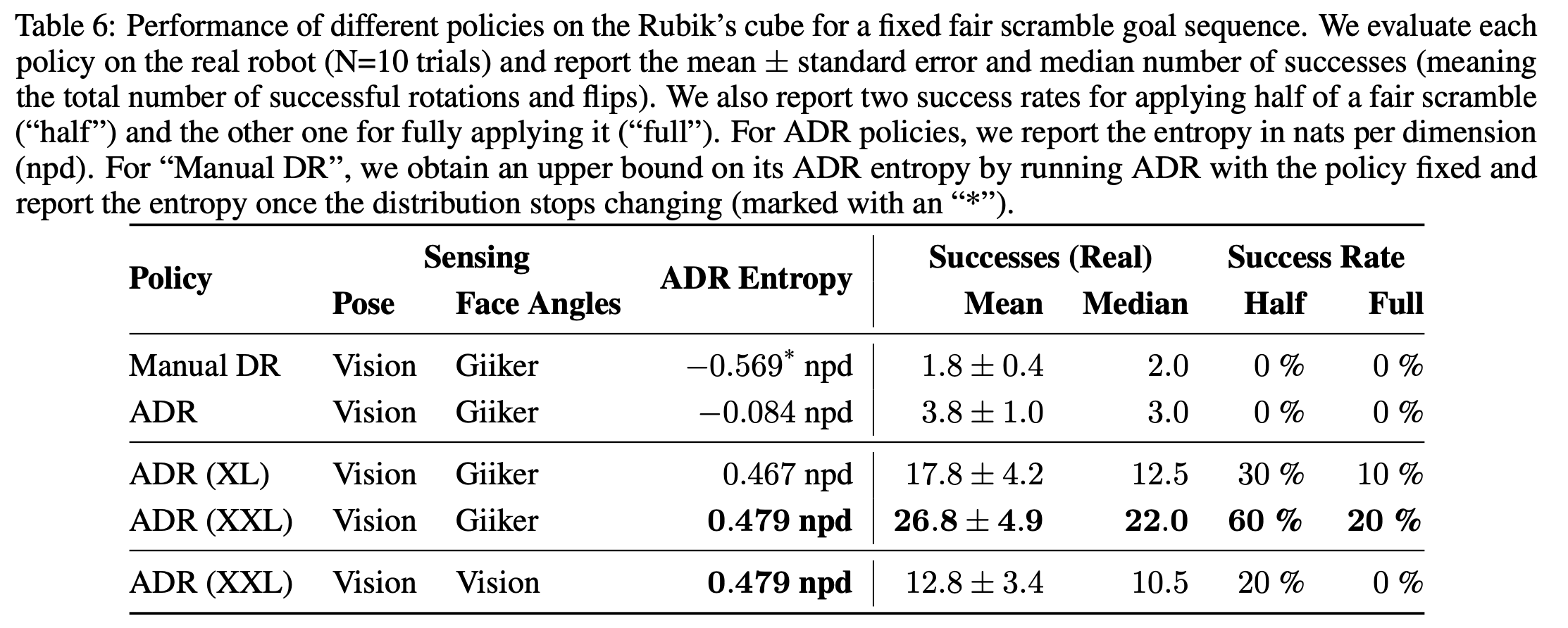
Solving Rubik's Cube with a Robot Hand by OpenAI, arXiv:1910.07113
subject to:
By russtedrake
MIT Robotic Manipulation Fall 2020 http://manipulation.csail.mit.edu


