



russtedrake PRO
Roboticist at MIT and TRI
MIT 6.800/6.843:
Robotic Manipulation
Fall 2021, Lecture 6
Follow live at https://slides.com/d/GtXguP8/live
(or later at https://slides.com/russtedrake/fall21-lec06)
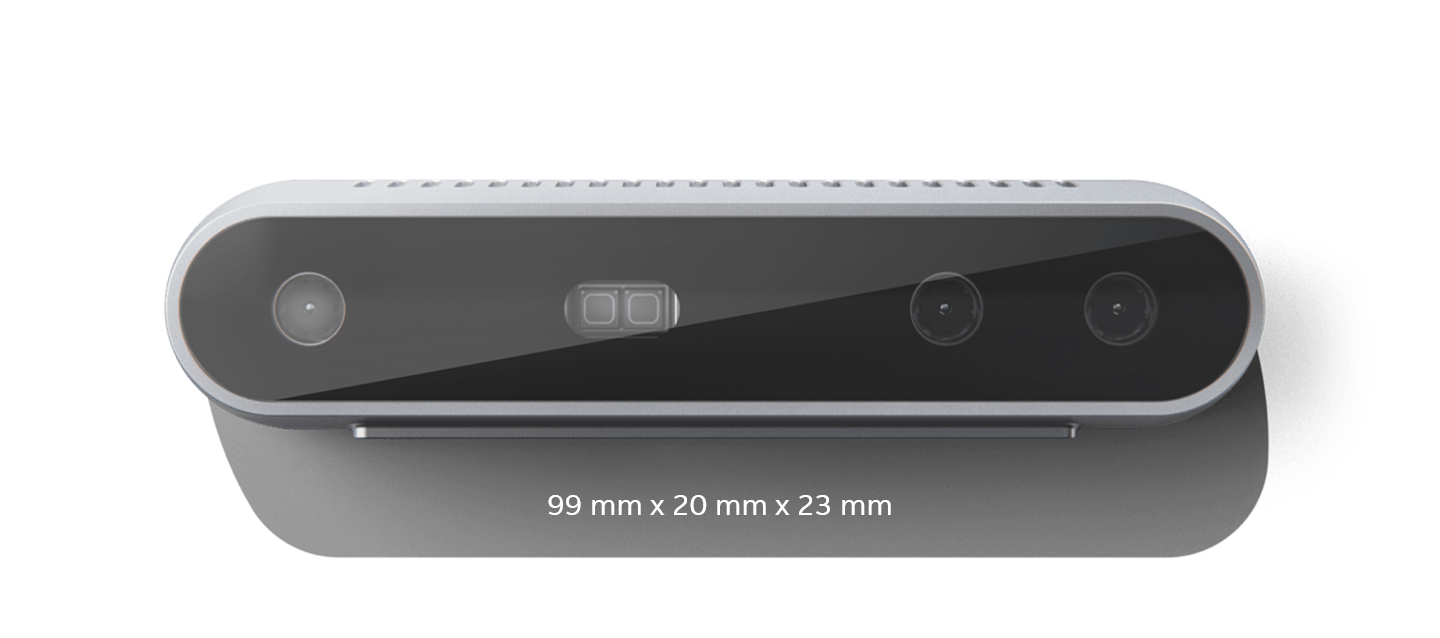
Intel Realsense D415
Our pick for the "Manipulation Station"
Major advantage over e.g. ToF: multiple cameras don't interfere with each other.
(also iPhone TrueDepth)
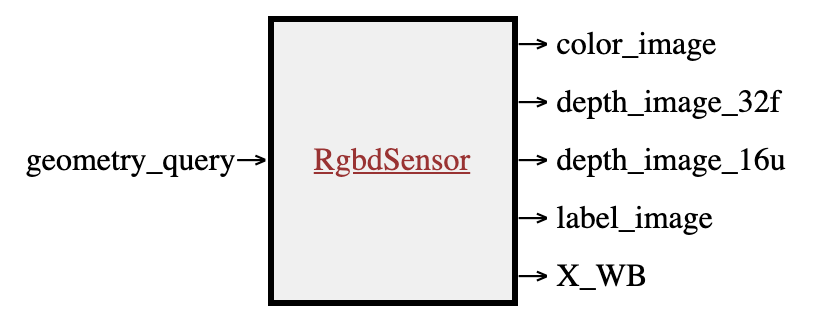
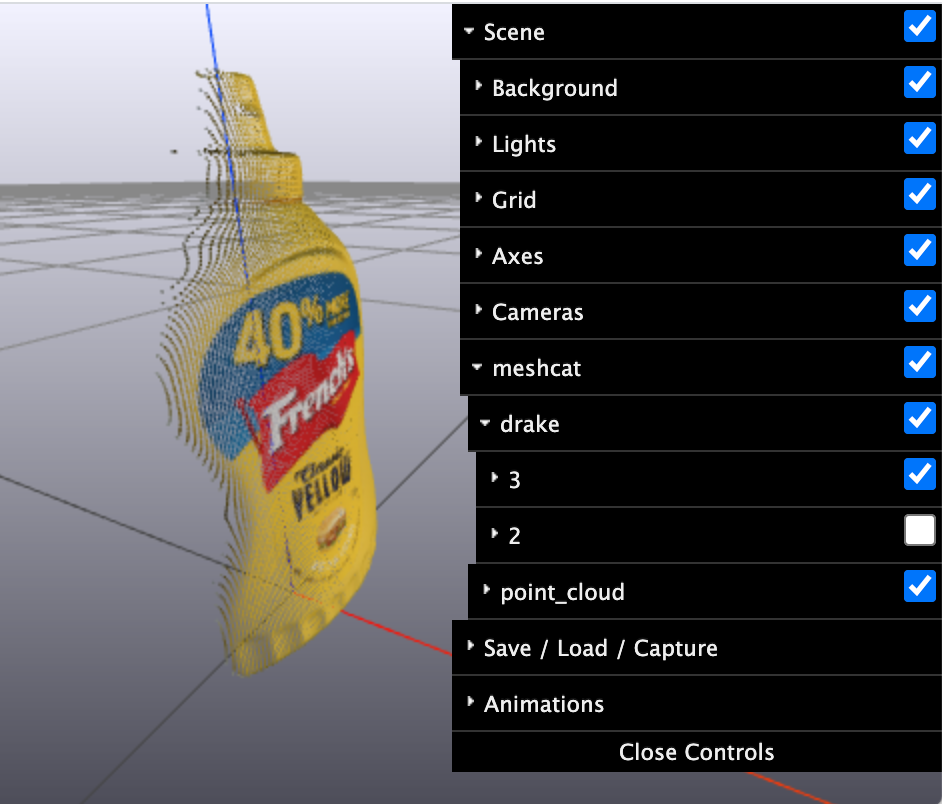
from the docs: "Each pixel in the output image from depth_image is a 16bit unsigned short in millimeters."
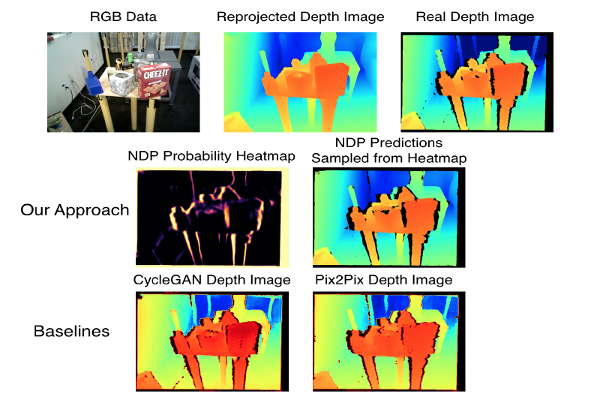
figure from Chris Sweeney et al. ICRA 2019.
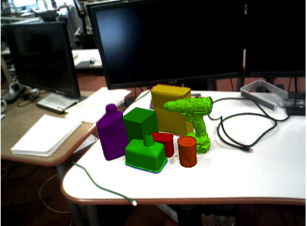
"Partial views"
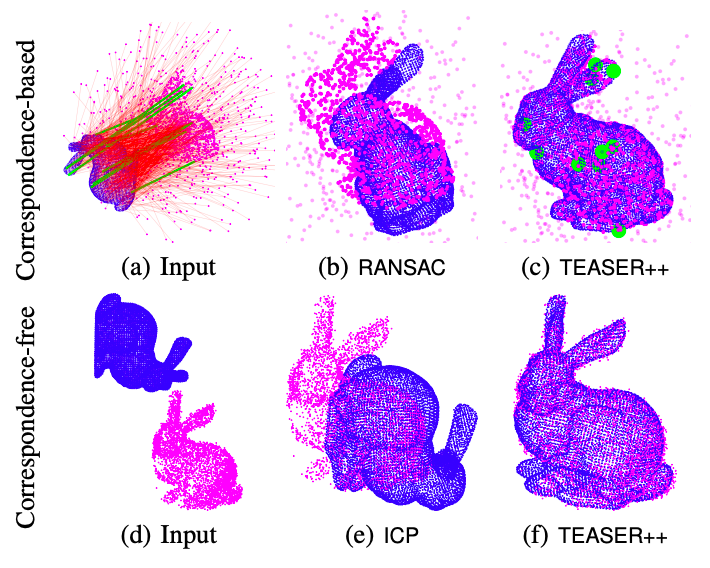
H. Yang, J. Shi, and L. Carlone, “TEASER: Fast and Certifiable Point Cloud Registration”, IEEE Transactions on Robotics (T-RO), 2020.
By russtedrake
MIT Robotic Manipulation Fall 2020 http://manipulation.csail.mit.edu


