






russtedrake PRO
Roboticist at MIT and TRI
MIT 6.821: Underactuated Robotics
Spring 2024, Lecture 18
Follow live at https://slides.com/d/syF900Q/live
(or later at https://slides.com/russtedrake/spring24-lec18)
Image credit: Boston Dynamics
Input: source \(v_s\), target \(v_t\), \(\tilde{g}\), \(\tilde{h}\), GetSuccessors()
Output: shortest path from \(v_s\) to \(v_t\)
\(p = \text{Path}([v_s])\)
\(S = \{ v_s : p \}\)
\(Q.\text{insert}(p)\)
while not \(Q.\text{empty}()\):
\(p = Q.\text{pop}()\)
\(u = p.\text{last}()\)
if \(u = v_t,\) then return \(p\)
for all \(v \in\) GetSuccessors\((u)\), where \(v \notin p\):
\(p' = \text{Path}(p, u)\)
if \(v \notin S\) or \(\tilde{g}(p') < \tilde{g}(S[v]),\):
\(S[v] = p'\)
\(Q.\text{insert}(p')\)
return failure
Visited dictionary
Priority queue using \(\tilde{f}\)
path with lowest \(\tilde{f}\)
Discrete A* algorithm
start
goal
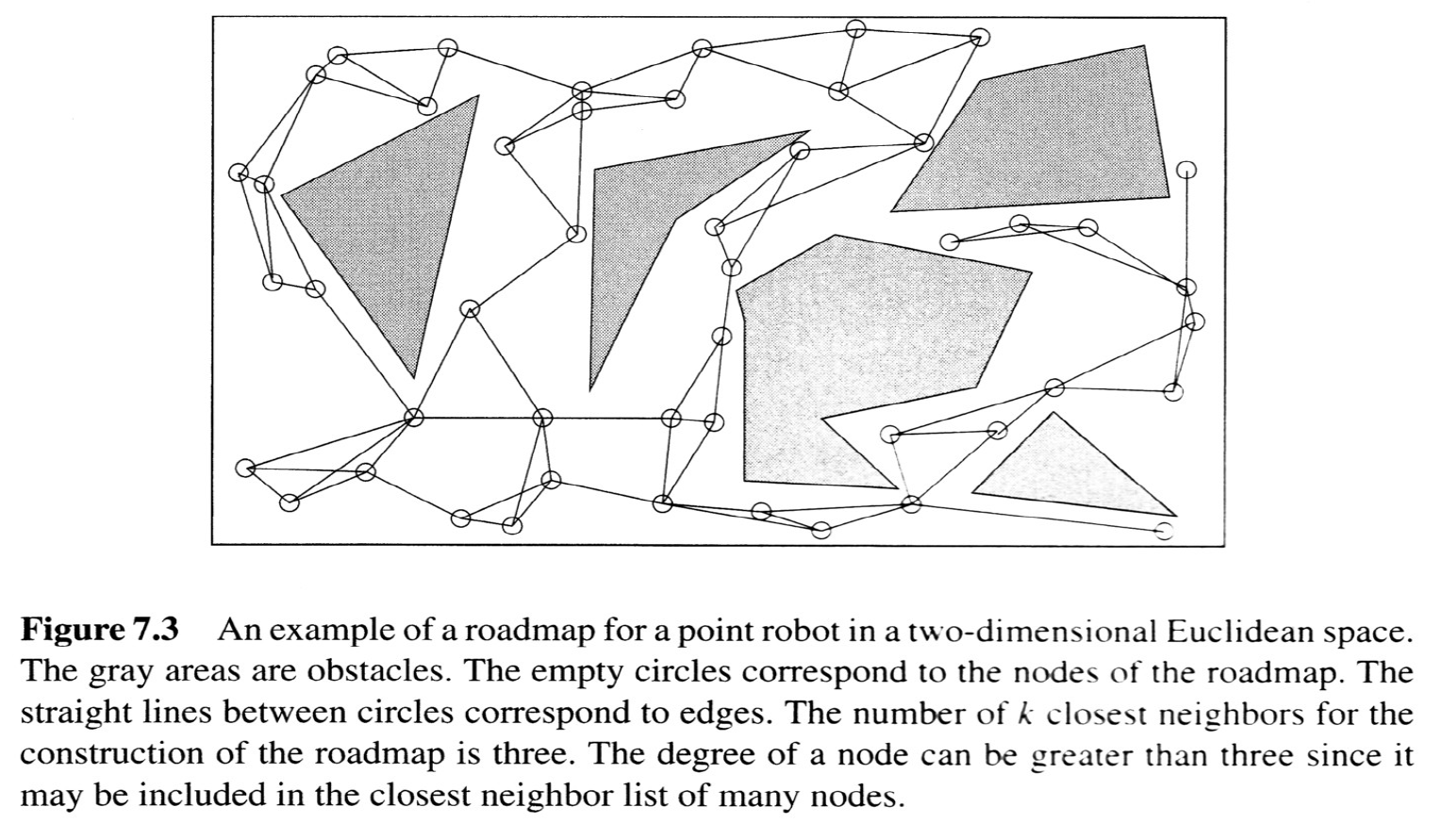
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
Amato, Nancy M., and Yan Wu. "A randomized roadmap method for path and manipulation planning." Proceedings of IEEE international conference on robotics and automation. Vol. 1. IEEE, 1996.
BUILD_ROADMAP () {
V = {}, E = {}
for k = 1 to K
repeat
q = RANDOM_CONFIG()
until q is collision free
V.insert(q)
for all q in V
for all qn in NearestNeighbors(q, V)
if {q,qn} is collision free
E.insert({q,qn})
}The Probabilistic Roadmap (PRM)
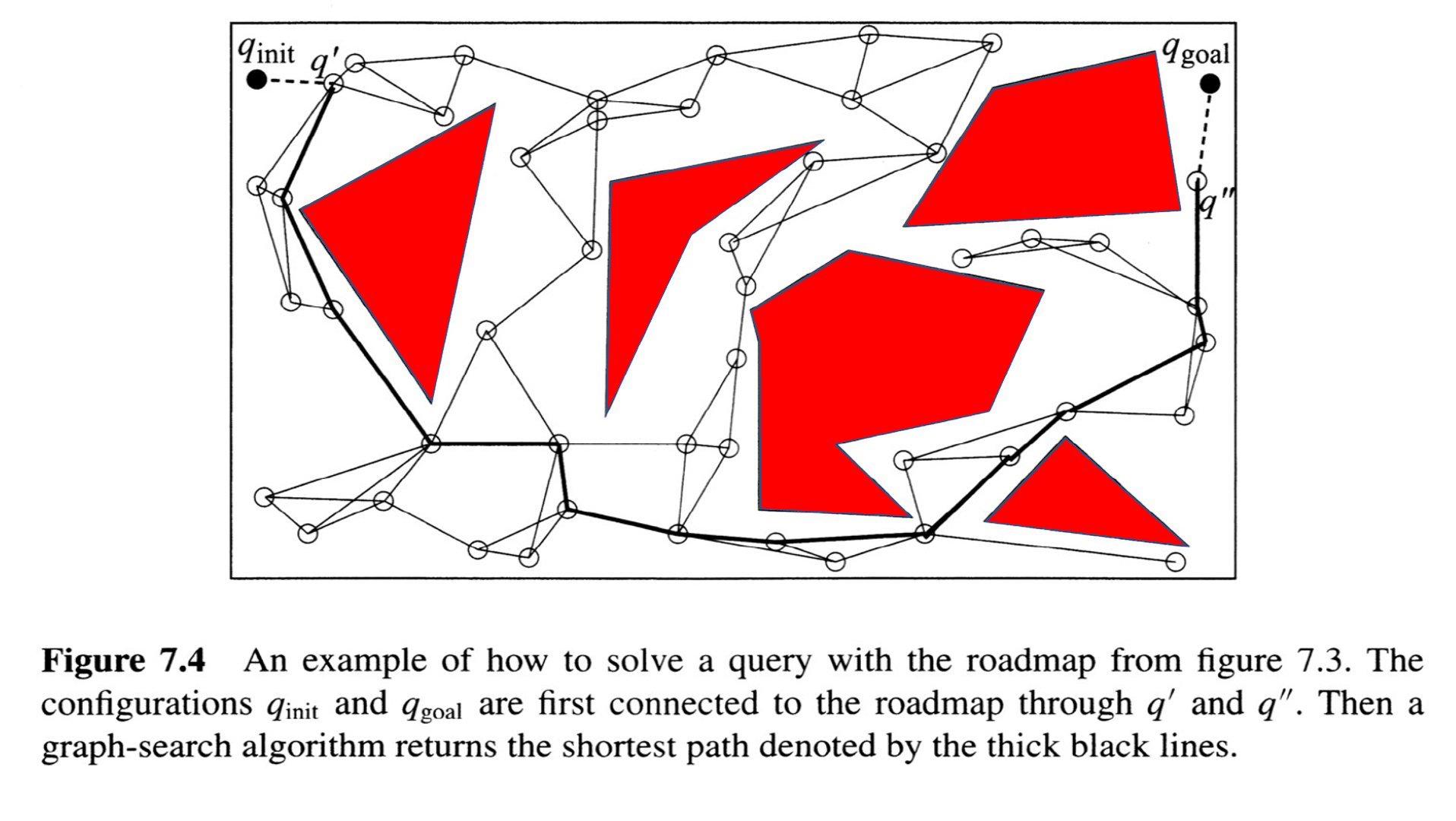
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
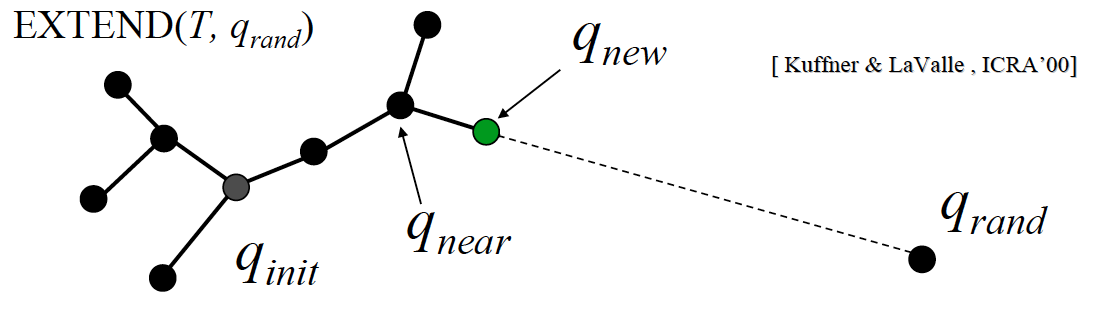
BUILD_RRT (qinit) {
T.init(q_init);
for k = 1 to K do
q_rand = RandomSample()
q_near = ClosestPoint(T, q_rand)
q_new = Extend(q_near, q_rand)
T.add(q_near, q_new)
}Naive Sampling
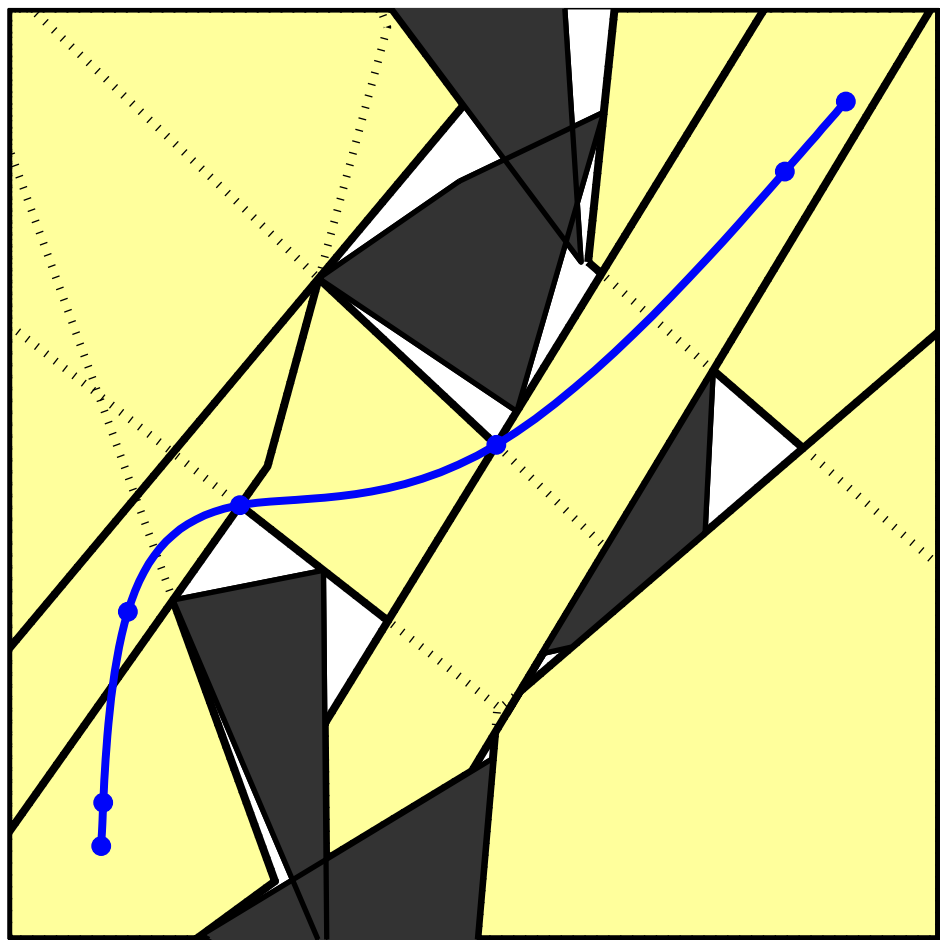
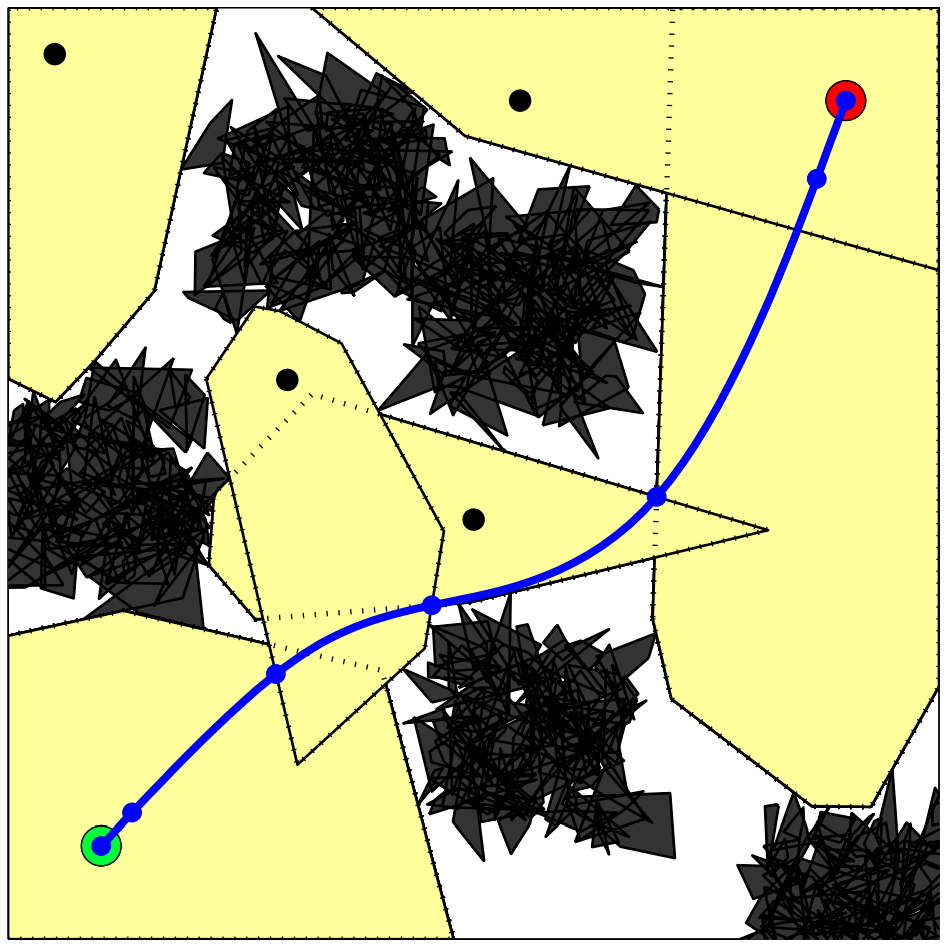
RRTs have a "Voronoi-bias"
http://www.kuffner.org/james/plan
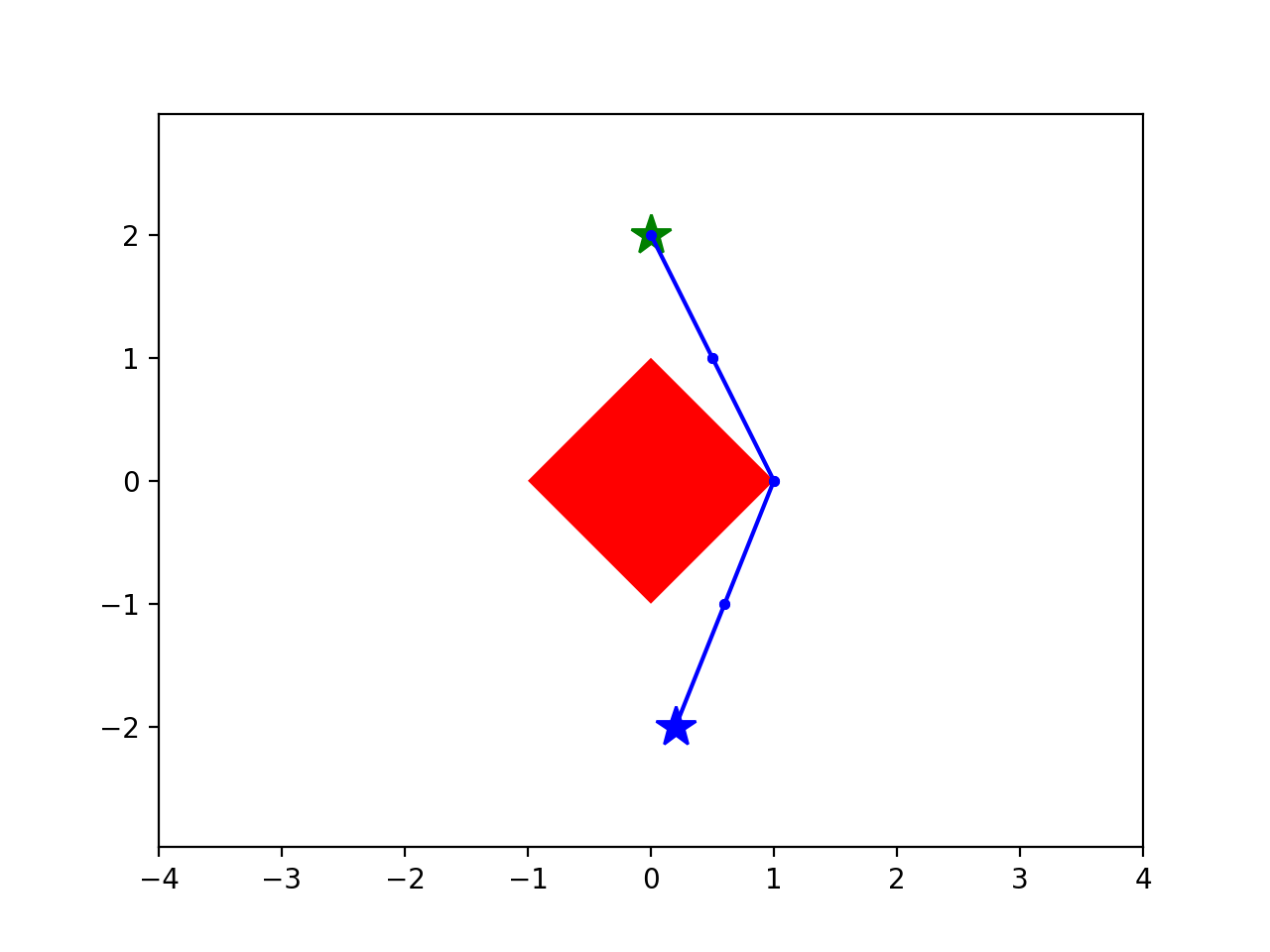
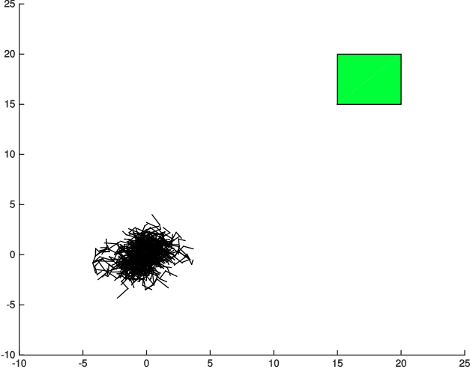
Cost-to-go for the obstacle-free case
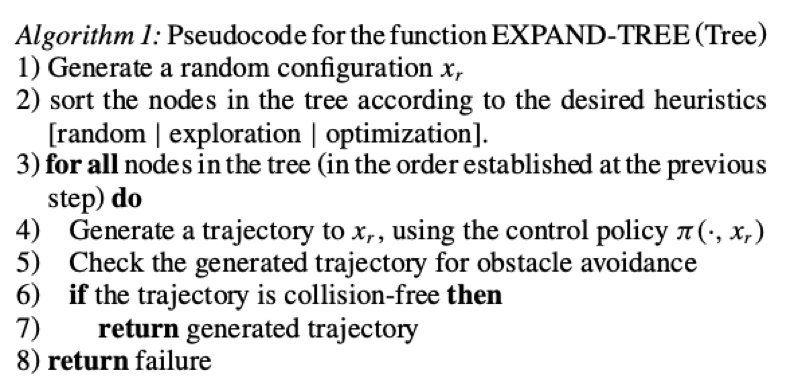
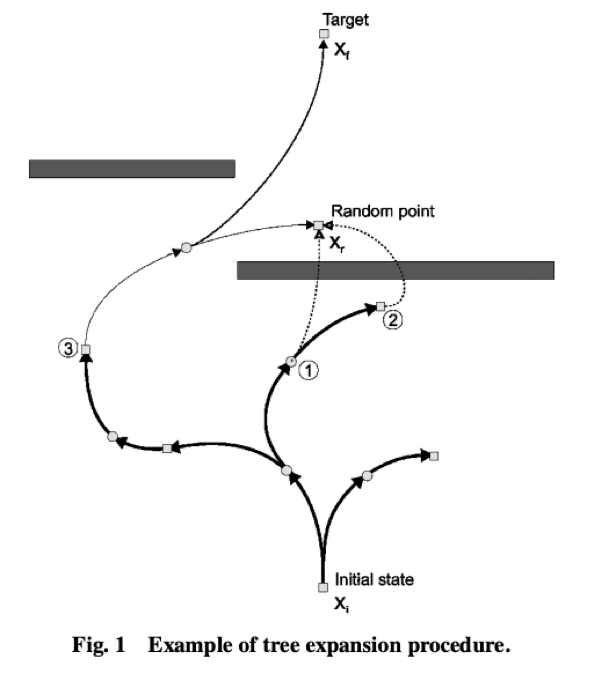
Basic RRT
Reachability-Guided RRT
Google "drake+ompl" to find some examples (on stackoverflow) of drake integration in C++. Using the python bindings should work, too.
By russtedrake
MIT Underactuated Robotics Spring 2024 http://underactuated.csail.mit.edu



