








russtedrake PRO
Roboticist at MIT and TRI
MIT 6.821: Underactuated Robotics
Spring 2023, Lecture 17
Follow live at https://slides.com/d/Yp1UjL4/live
(or later at https://slides.com/russtedrake/spring24-lec17)
Image credit: Boston Dynamics
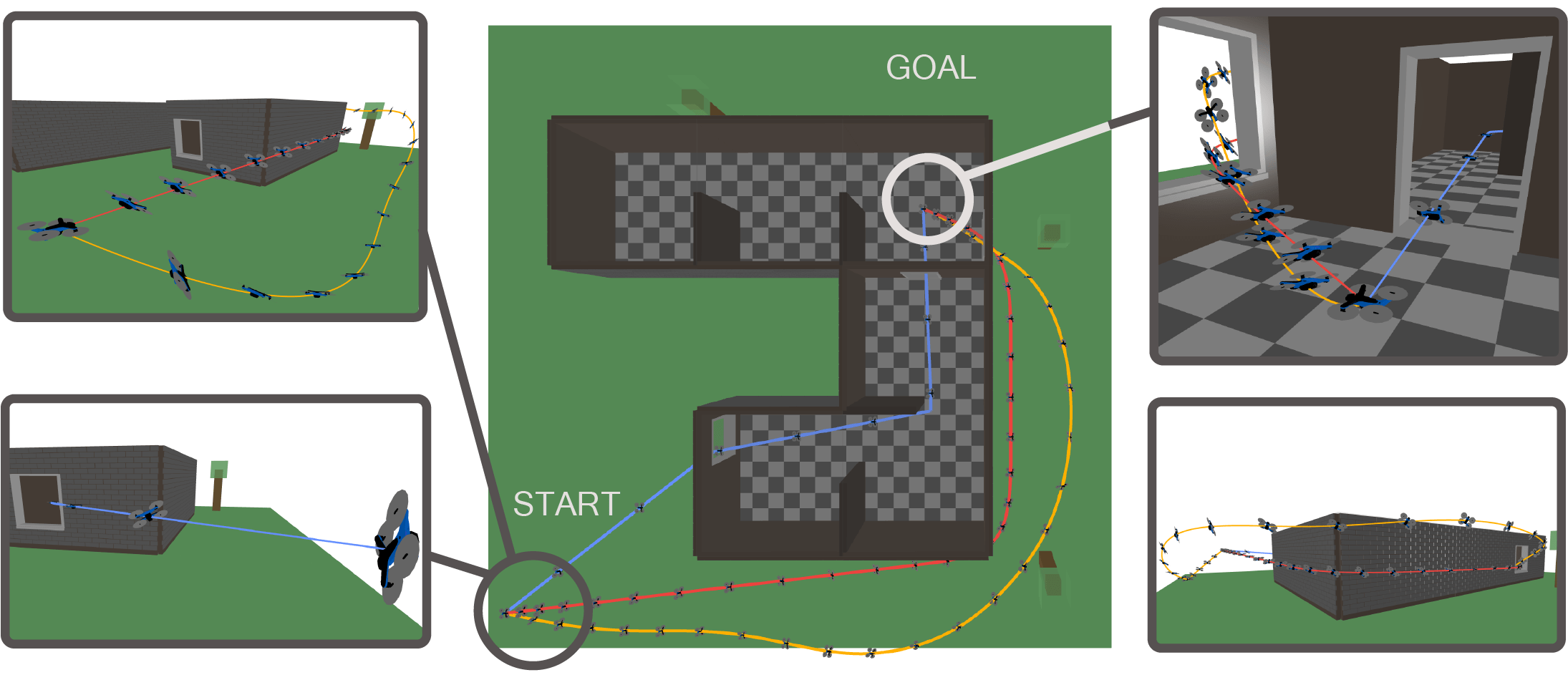
start
goal
Two aspects of the motion planning problem:
start
goal
start
goal
fixed number of samples
collision-avoidance
(outside the \(L^1\) ball)
nonconvex
goal
start
disjunctive
constraints
"Convex relaxation" replaces this with:
"Mixed-integer convex" iff \(f\) and \(g\) are convex.
Convex relaxation is "tight" when the relaxed solution is a solution to the original problem.
Convex relaxations provide lower bounds
Feasible solutions provide upper bounds
convex
convex
convex
convex
convex
\(\Rightarrow\) Long solve times.
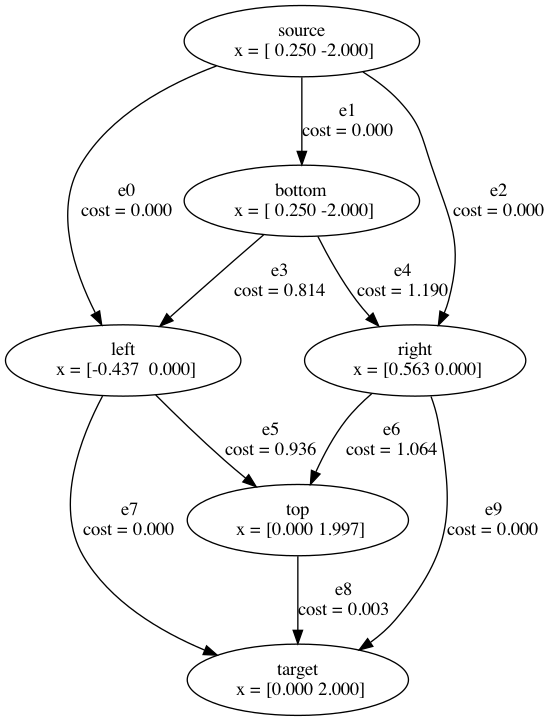
\(\varphi_{ij} = 1\) if the edge \((i,j)\) in shortest path, otherwise \(\varphi_{ij} = 0.\)
\(c_{ij} \) is the (constant) length of edge \((i,j).\)
"flow constraints"
binary relaxation
path length
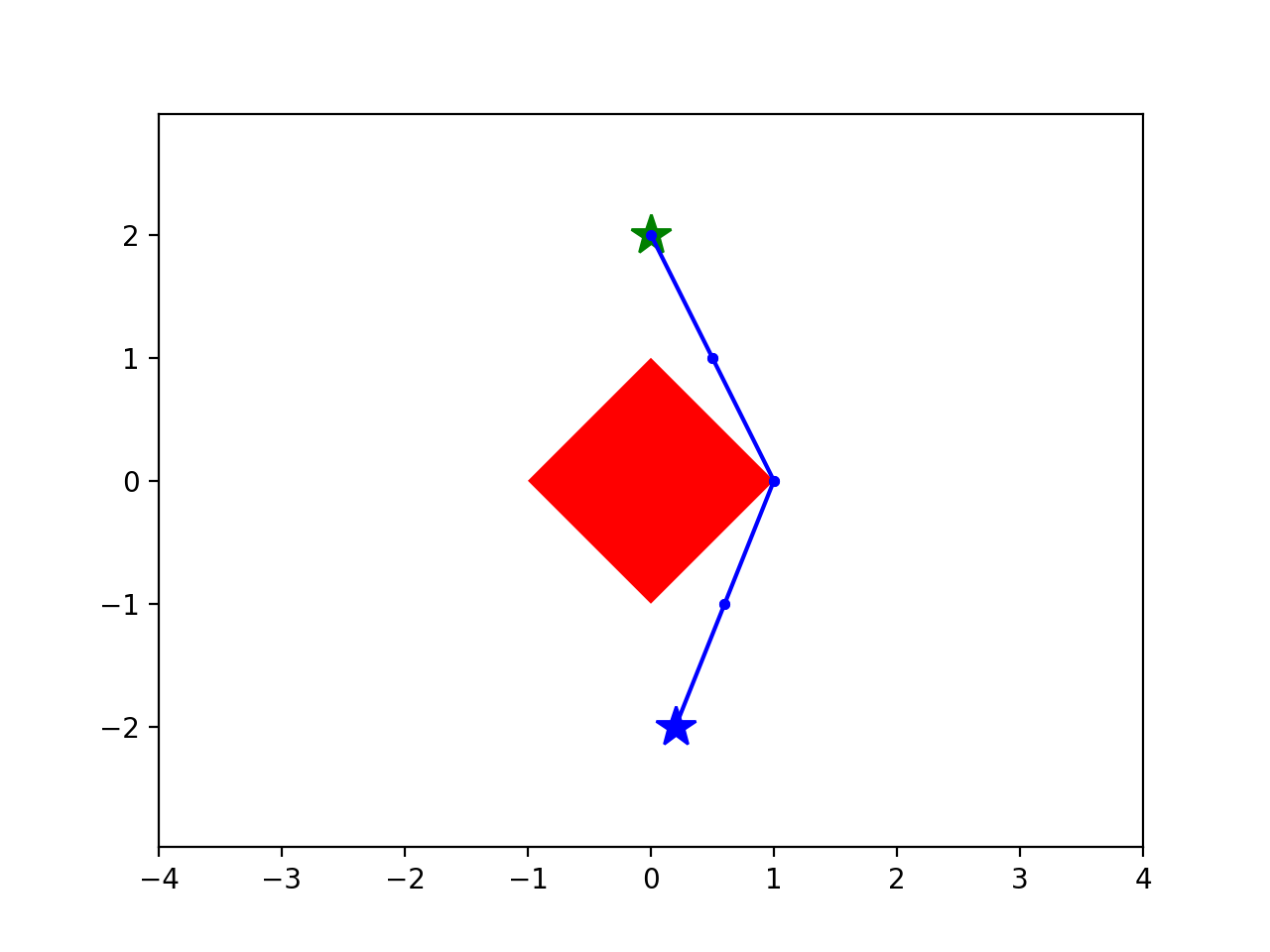
Note: The blue regions are not obstacles.
Classic shortest path LP
now w/ Convex Sets
Non-negative scaling of a convex set is still convex (e.g. via "perspective functions")
Achieved orders of magnitude speedups.
convex
start
goal
This is the convex relaxation
(it is tight!).
is the convex relaxation. (it's tight!)
Previous formulations were intractable; would have required \( 6.25 \times 10^6\) binaries.
| Previous best formulations | New formulation | |
|---|---|---|
| Lower Bound (from convex relaxation) |
7% of MICP | 80% of MICP |
By russtedrake
MIT Underactuated Robotics Spring 2024 http://underactuated.csail.mit.edu



