








russtedrake PRO
Roboticist at MIT and TRI
(aka "Bin Picking")
MIT 6.800/6.843:
Robotic Manipulation
Fall 2021, Lecture 8
Follow live at https://slides.com/d/flsZtLY/live
(or later at https://slides.com/russtedrake/fall21-lec08)
This week:
Probability distributions over environments. Work by Greg Izatt
YCB Benchmarks – Object and Model Set
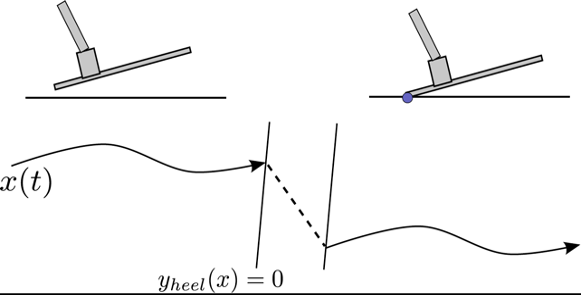
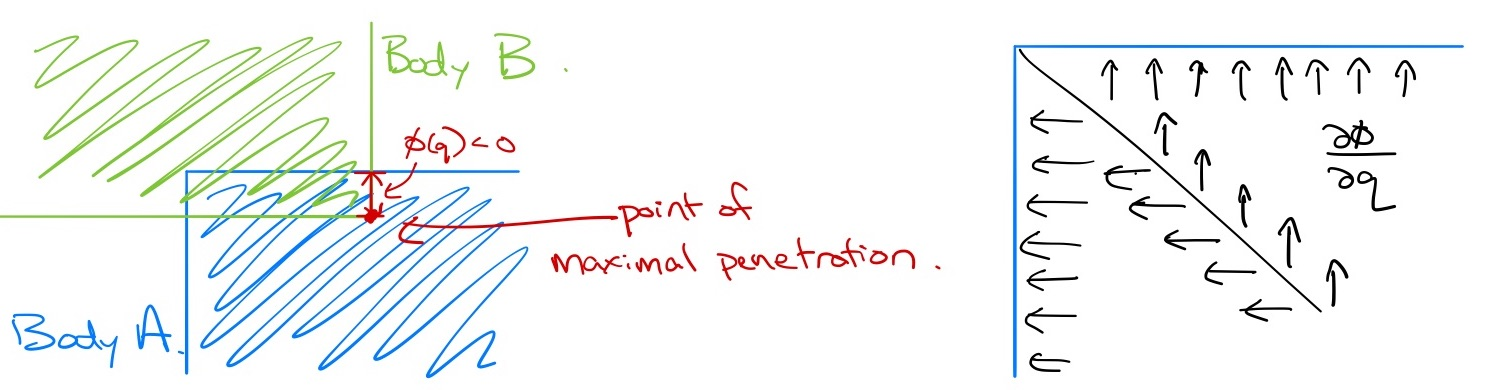
The cartoon from walking is not rich enough for manipulation...
Green arrow is the force on the red box due to the overlap with the blue box.
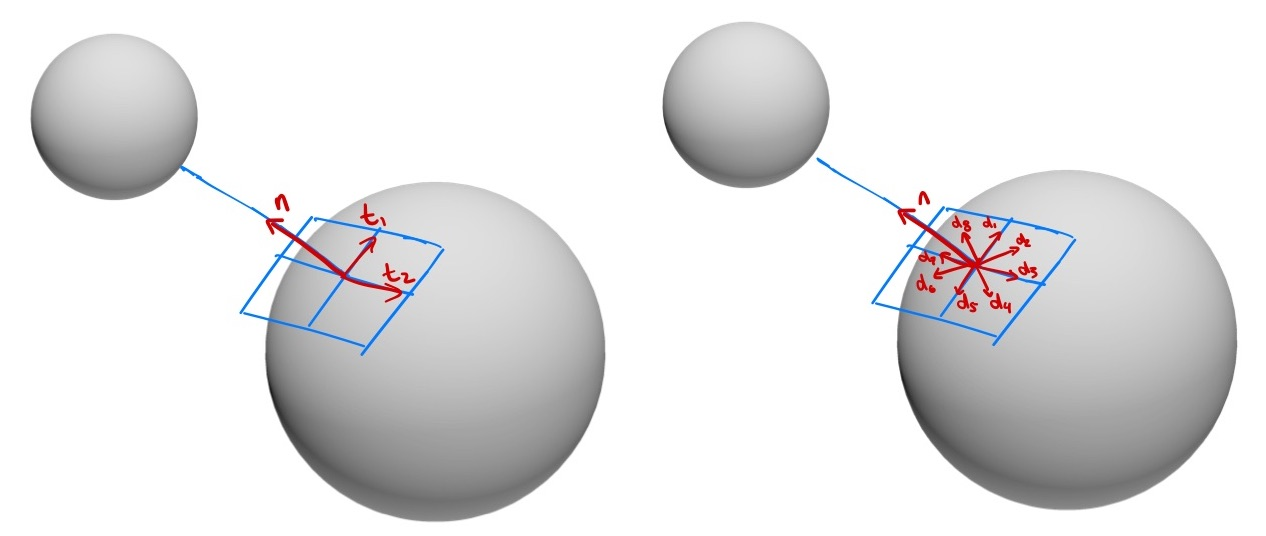
Many heuristics for using multiple points...
major contributions from Damrong Guoy, Sean Curtis, Rick Cory, Alejandro Castro, ...
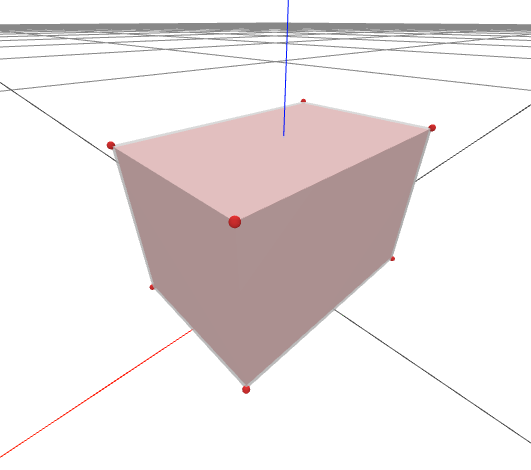
Red box is rigid, blue box is soft.
Both boxes are soft.
Point contact (discontinuous)
Hydroelastic
(continuous)
vs
Hydroelastic is
State-space (for simulation, planning, control) is the original rigid-body state.
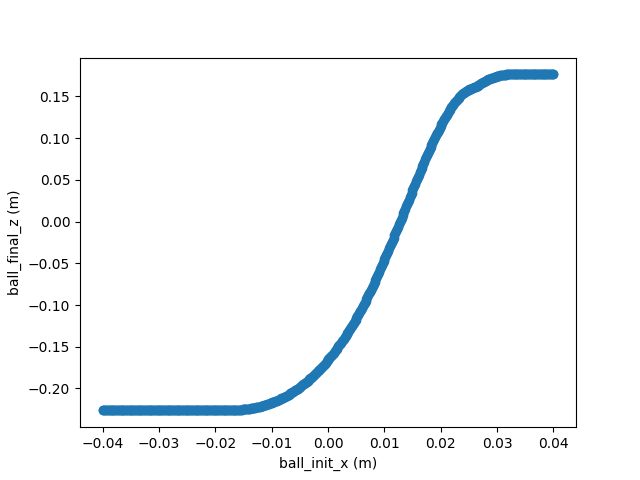
Point contact and multi-point contact can produce qualitatively wrong behavior.
Hydroelastic often resolves it.
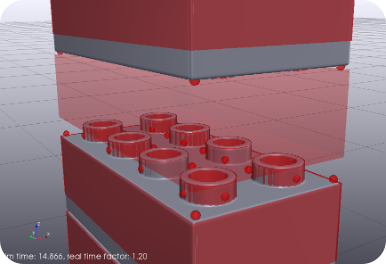
Manually-curated point contacts
Hydroelastic contact surfaces
Stable and symmetrical hydroelastic forces
Before
Now
Text
Point contact
Hydroelastic contact
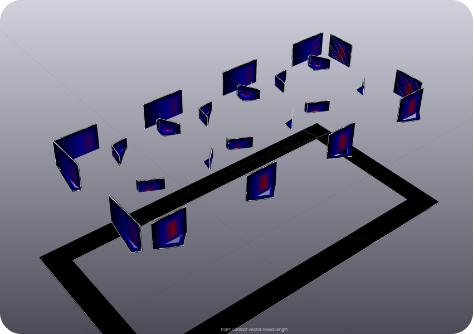
the frictionless case
Point contact (no friction)
Hydroelastic
(no friction)
By russtedrake
MIT Robotic Manipulation Fall 2021 http://manipulation.csail.mit.edu


