


russtedrake PRO
Roboticist at MIT and TRI
MIT 6.800/6.843:
Robotic Manipulation
Fall 2021, Lecture 14
Follow live at https://slides.com/d/lJtvKyA/live
(or later at https://slides.com/russtedrake/fall21-lec14)
Full derivation is here.
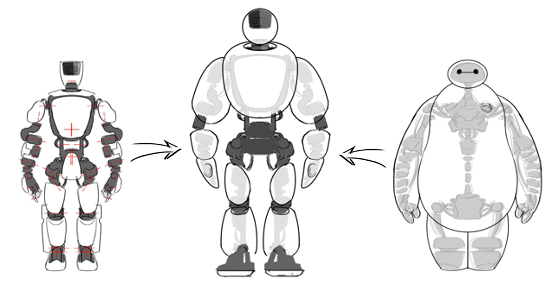
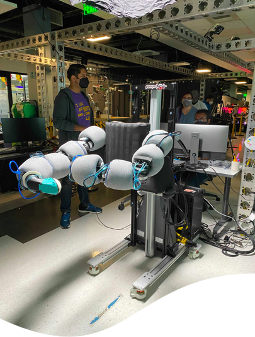
Project PUNYO
ぷにょ
Project PUNYO
ぷにょ
By russtedrake
MIT Robotic Manipulation Fall 2021 http://manipulation.csail.mit.edu


