


















russtedrake PRO
Roboticist at MIT and TRI
Follow live at https://slides.com/d/YBo9i4k/live
(or later at https://slides.com/russtedrake/fall22-lec02)
Robotic Manipulation
Fall 2022, Lecture 2
Click here
https://www.infineon.com/cms/en/discoveries/robotics-systems-safety-security/
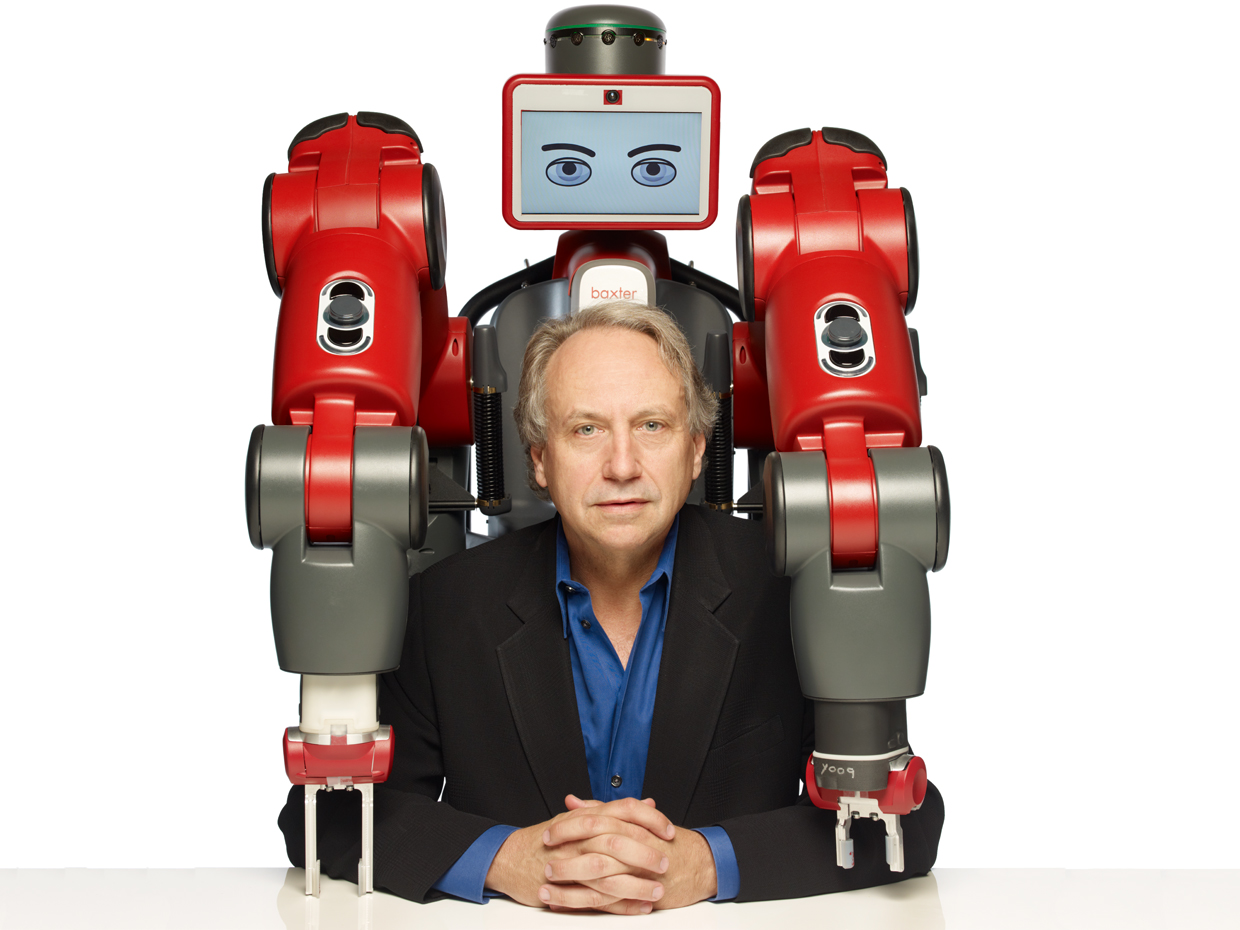
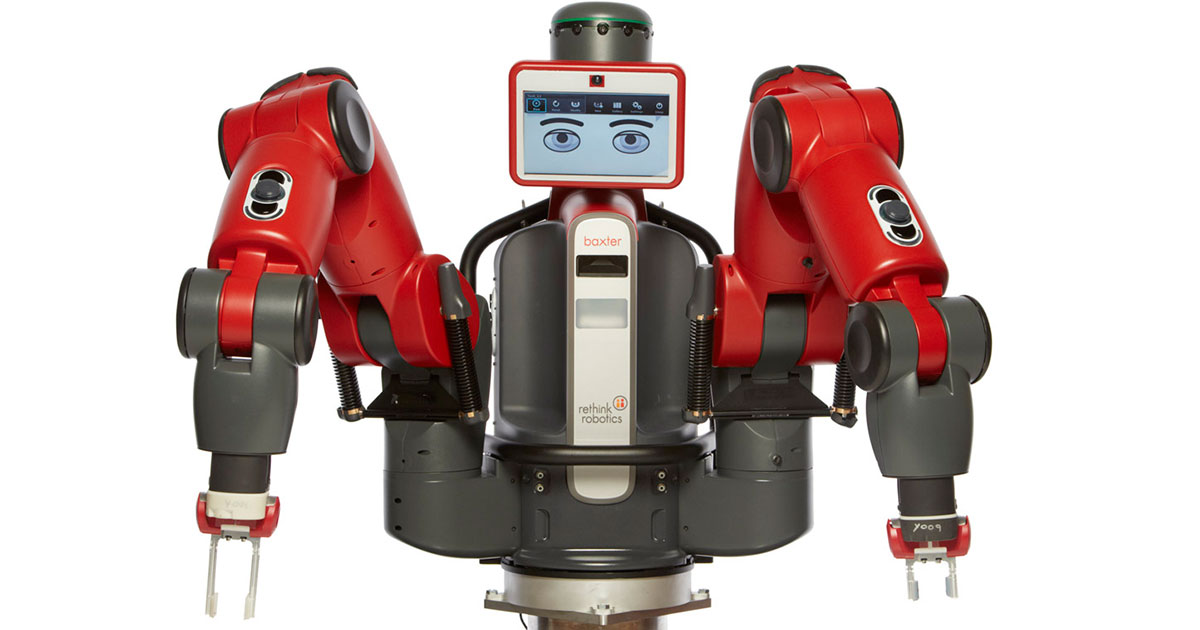
https://spectrum.ieee.org/robotics/industrial-robots/rethink-robotics-baxter-robot-factory-worker
Universal Robots
Rethink
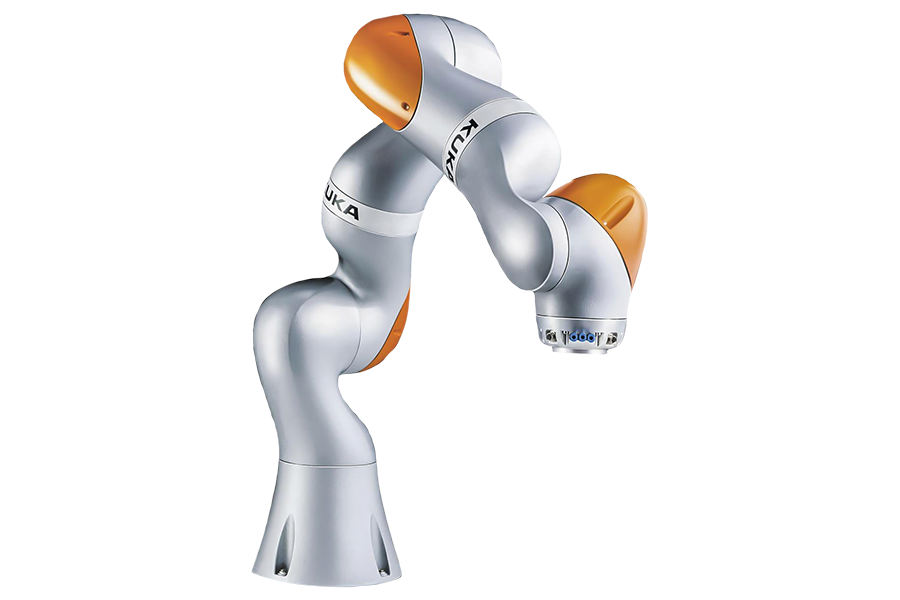
Kuka
Kinova
ABB
Franka
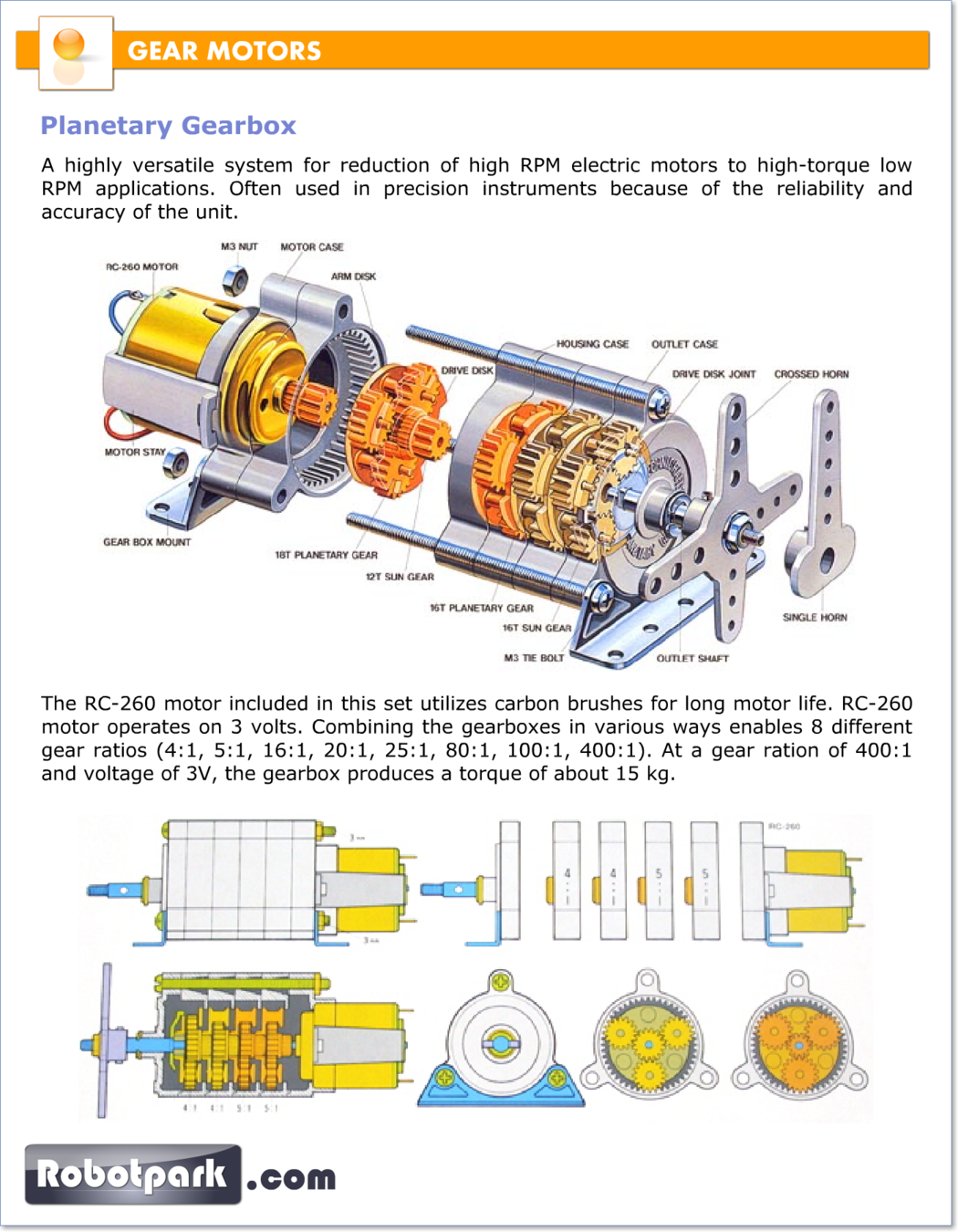
http://robotpark.com/academy/gear-motors-gearboxes-51055/
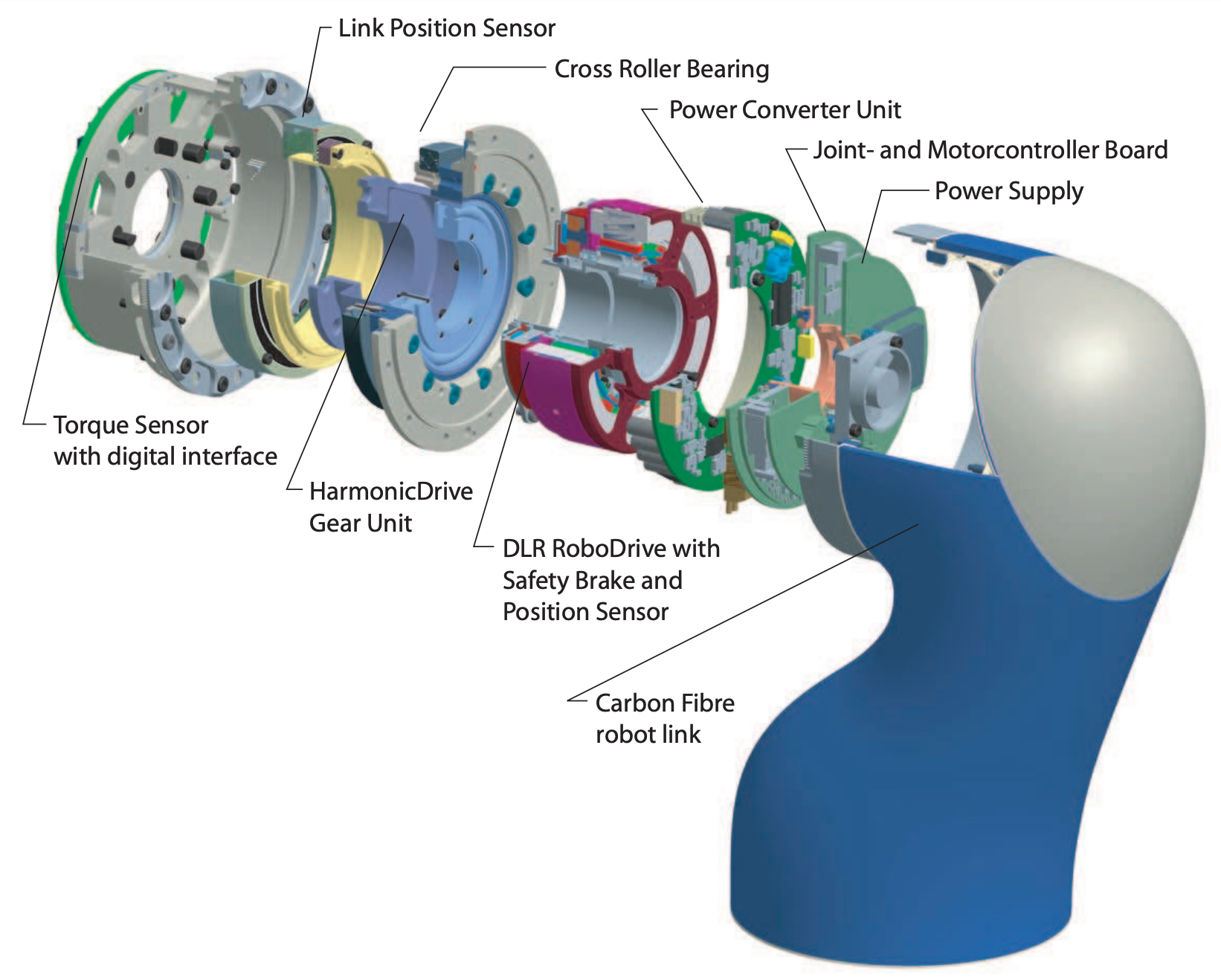
A. Albu-Schäffer, S. Haddadin, C. Ott, A. Stemmer, T. Wimböck, and G. Hirzinger, "The DLR lightweight robot: design and control concepts for robots in human environments," Industrial Robot: An International Journal, vol. 34, pp. 376-385, 2007.
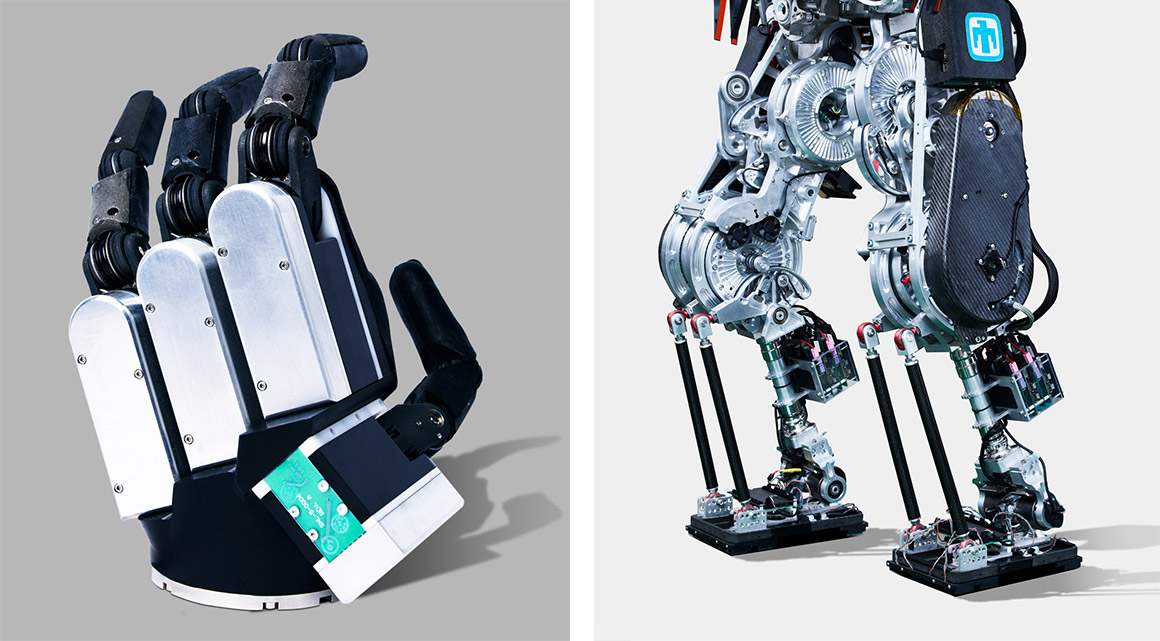
Atlas (v1) by Boston Dynamics
from pydrake.all import MultibodyPlant, FindResourceOrThrow, Parser
plant = MultibodyPlant(time_step=1e-4)
Parser(plant).AddModelFromFile(".../iiwa14_no_collision.sdf")
plant.WeldFrames(plant.world_frame(), plant.GetFrameByName("iiwa_link_0"))
plant.Finalize()<?xml version="1.0"?>
<sdf version="1.7">
<model name="iiwa14">
<link name="iiwa_link_0">
<inertial>
<pose>-0.1 0 0.07 0 0 0</pose>
<mass>5</mass>
<inertia>
<ixx>0.05</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.06</iyy>
<iyz>0</iyz>
<izz>0.03</izz>
</inertia>
</inertial>
<visual name="iiwa_link_0_fixed_joint_lump__iiwa_link_0_visual">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/link_0.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>0.4 0.4 0.4 1.0</diffuse>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<link name="iiwa_link_1">
<pose relative_to="iiwa_joint_1"/>
<inertial>
<pose>0 -0.03 0.12 0 0 0</pose>
<mass>5.76</mass>
<inertia>
<ixx>0.033</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.0333</iyy>
<iyz>0</iyz>
<izz>0.0123</izz>
</inertia>
</inertial>
<visual name="iiwa_link_1_visual">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/link_1.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>0.4 0.4 0.4 1.0</diffuse>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="iiwa_joint_1" type="revolute">
<pose relative_to="iiwa_link_0">0 0 0.1575 0 0 0</pose>
<child>iiwa_link_1</child>
<parent>iiwa_link_0</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-2.96706</lower>
<upper>2.96706</upper>
<effort>300</effort>
<velocity>10</velocity>
</limit>
<dynamics>
<damping>0.0</damping>
<friction>0</friction>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
</axis>
</joint>
<link name="iiwa_link_2">
<pose relative_to="iiwa_joint_2"/>
<inertial>
<pose>0.0003 0.059 0.042 0 0 0</pose>
<mass>6.35</mass>
<inertia>
<ixx>0.0305</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.0304</iyy>
<iyz>0</iyz>
<izz>0.011</izz>
</inertia>
</inertial>
<visual name="iiwa_link_2_visual_grey">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/link_2_grey.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>0.4 0.4 0.4 1.0</diffuse>
</material>
</visual>
<visual name="iiwa_link_2_visual_orange">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/link_2_orange.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>1.0 0.423529411765 0.0392156862745 1.0</diffuse>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="iiwa_joint_2" type="revolute">
<pose relative_to="iiwa_link_1">
0 0 0.2025 1.570796326794897 0 3.141592653589793
</pose>
<child>iiwa_link_2</child>
<parent>iiwa_link_1</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-2.0944</lower>
<upper>2.0944</upper>
<effort>300</effort>
<velocity>10</velocity>
</limit>
<dynamics>
<damping>0.0</damping>
<friction>0</friction>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
</axis>
</joint>
<link name="iiwa_link_3">
<pose relative_to="iiwa_joint_3"/>
<inertial>
<pose>0 0.03 0.13 0 0 0</pose>
<mass>3.5</mass>
<inertia>
<ixx>0.025</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.0238</iyy>
<iyz>0</iyz>
<izz>0.0076</izz>
</inertia>
</inertial>
<visual name="iiwa_link_3_visual">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/link_3.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>0.4 0.4 0.4 1.0</diffuse>
</material>
</visual>
<visual name="iiwa_link_3_visual_band">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/band.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>0.6 0.6 0.6 1.0</diffuse>
</material>
</visual>
<visual name="iiwa_link_3_visual_kuka">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/kuka.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>0 0 0 1</diffuse>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="iiwa_joint_3" type="revolute">
<pose relative_to="iiwa_link_2">0 0.2045 0 1.570796326794897 0 3.141592653589793</pose>
<child>iiwa_link_3</child>
<parent>iiwa_link_2</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-2.96706</lower>
<upper>2.96706</upper>
<effort>300</effort>
<velocity>10</velocity>
</limit>
<dynamics>
<damping>0.0</damping>
<friction>0</friction>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
</axis>
</joint>
<link name="iiwa_link_4">
<pose relative_to="iiwa_joint_4"/>
<inertial>
<pose>0 0.067 0.034 0 0 0</pose>
<mass>3.5</mass>
<inertia>
<ixx>0.017</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.0164</iyy>
<iyz>0</iyz>
<izz>0.006</izz>
</inertia>
</inertial>
<visual name="iiwa_link_4_visual_grey">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/link_4_grey.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>0.4 0.4 0.4 1.0</diffuse>
</material>
</visual>
<visual name="iiwa_link_4_visual_orange">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/link_4_orange.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>1.0 0.423529411765 0.0392156862745 1.0</diffuse>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="iiwa_joint_4" type="revolute">
<pose relative_to="iiwa_link_3">0 0 0.2155 1.570796326794897 0 0</pose>
<child>iiwa_link_4</child>
<parent>iiwa_link_3</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-2.0944</lower>
<upper>2.0944</upper>
<effort>300</effort>
<velocity>10</velocity>
</limit>
<dynamics>
<damping>0.0</damping>
<friction>0</friction>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
</axis>
</joint>
<link name="iiwa_link_5">
<pose relative_to="iiwa_joint_5"/>
<inertial>
<pose>0.0001 0.021 0.076 0 0 0</pose>
<mass>3.5</mass>
<inertia>
<ixx>0.01</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.0087</iyy>
<iyz>0</iyz>
<izz>0.00449</izz>
</inertia>
</inertial>
<visual name="iiwa_link_5_visual">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/link_5.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>0.4 0.4 0.4 1.0</diffuse>
</material>
</visual>
<visual name="iiwa_link_5_visual_band">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/band.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>0.6 0.6 0.6 1.0</diffuse>
</material>
</visual>
<visual name="iiwa_link_5_visual_kuka">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/kuka.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>0 0 0 1</diffuse>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="iiwa_joint_5" type="revolute">
<pose relative_to="iiwa_link_4">0 0.1845 0 -1.570796326794897 3.141592653589793 0</pose>
<child>iiwa_link_5</child>
<parent>iiwa_link_4</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-2.96706</lower>
<upper>2.96706</upper>
<effort>300</effort>
<velocity>10</velocity>
</limit>
<dynamics>
<damping>0.0</damping>
<friction>0</friction>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
</axis>
</joint>
<link name="iiwa_link_6">
<pose relative_to="iiwa_joint_6"/>
<inertial>
<pose>0 0.0006 0.0004 0 0 0</pose>
<mass>1.8</mass>
<inertia>
<ixx>0.0049</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.0047</iyy>
<iyz>0</iyz>
<izz>0.0036</izz>
</inertia>
</inertial>
<visual name="iiwa_link_6_visual_grey">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/link_6_grey.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>0.4 0.4 0.4 1.0</diffuse>
</material>
</visual>
<visual name="iiwa_link_6_visual_orange">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/link_6_orange.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>1.0 0.423529411765 0.0392156862745 1.0</diffuse>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="iiwa_joint_6" type="revolute">
<pose relative_to="iiwa_link_5">0 0 0.2155 1.570796326794897 0 0</pose>
<child>iiwa_link_6</child>
<parent>iiwa_link_5</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-2.0944</lower>
<upper>2.0944</upper>
<effort>300</effort>
<velocity>10</velocity>
</limit>
<dynamics>
<damping>0.0</damping>
<friction>0</friction>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
</axis>
</joint>
<link name="iiwa_link_7">
<pose relative_to="iiwa_joint_7"/>
<inertial>
<pose>0 0 0.02 0 0 0</pose>
<mass>1.2</mass>
<inertia>
<ixx>0.001</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.001</iyy>
<iyz>0</iyz>
<izz>0.001</izz>
</inertia>
</inertial>
<visual name="iiwa_link_7_visual">
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>../meshes/visual/link_7.obj</uri>
</mesh>
</geometry>
<material>
<diffuse>0.4 0.4 0.4 1.0</diffuse>
</material>
</visual>
<gravity>1</gravity>
<velocity_decay/>
<self_collide>0</self_collide>
</link>
<joint name="iiwa_joint_7" type="revolute">
<pose relative_to="iiwa_link_6">
0 0.081 0 -1.570796326794897 3.141592653589793 0
</pose>
<child>iiwa_link_7</child>
<parent>iiwa_link_6</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<lower>-3.05433</lower>
<upper>3.05433</upper>
<effort>300</effort>
<velocity>10</velocity>
</limit>
<dynamics>
<damping>0.0</damping>
<friction>0</friction>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
</axis>
</joint>
<static>0</static>
<plugin name="gazebo_ros_controller" filename="libgazebo_ros_control.so">
<robotNamespace>/iiwa</robotNamespace>
</plugin>
</model>
</sdf>model_directives = """
directives:
- add_directives:
file: package://manipulation/clutter.dmd.yaml
- add_model:
name: foam_brick
file: package://drake/examples/manipulation_station/models/061_foam_brick.sdf
default_free_body_pose:
base_link:
translation: [0, -0.6, 0.2]
"""
builder = DiagramBuilder()
station = builder.AddSystem(MakeManipulationStation(model_directives, time_step=0.005))
...
diagram = builder.Build()http://personalrobotics.stanford.edu/
Schunk WSG 50
Force-controlled planar gripper
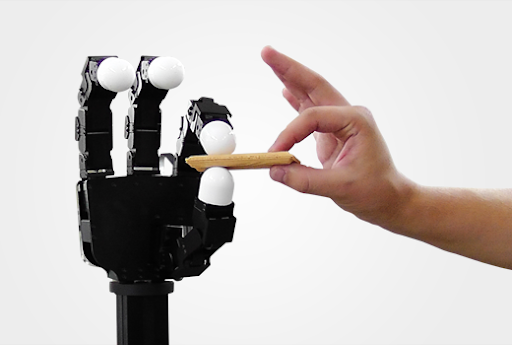
Sandia Hand
iHY (i-Robot, Harvard, Yale)
Robotiq 3-fingered gripper
By russtedrake
MIT Robotic Manipulation Fall 2020 http://manipulation.csail.mit.edu


