























russtedrake PRO
Roboticist at MIT and TRI
Part 2
MIT 6.4210/2
Robotic Manipulation
Fall 2022, Lecture 12
Follow live at https://slides.com/d/4wyOGn8/live
(or later at https://slides.com/russtedrake/fall22-lec12)
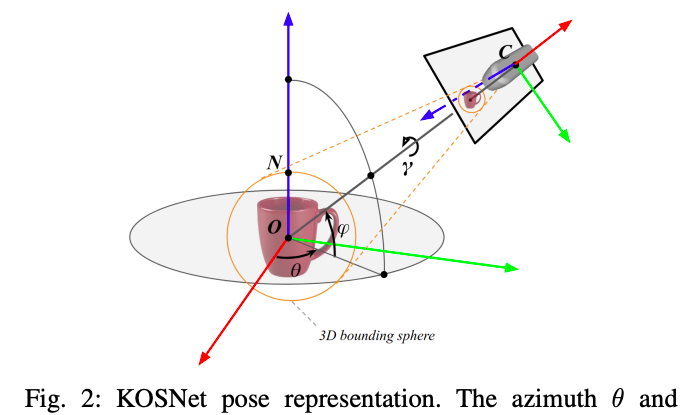
SE(3) pose is difficult to generalize across a category
So how do we even specify the task?
What's the cost function?
(Images of mugs on the rack?)
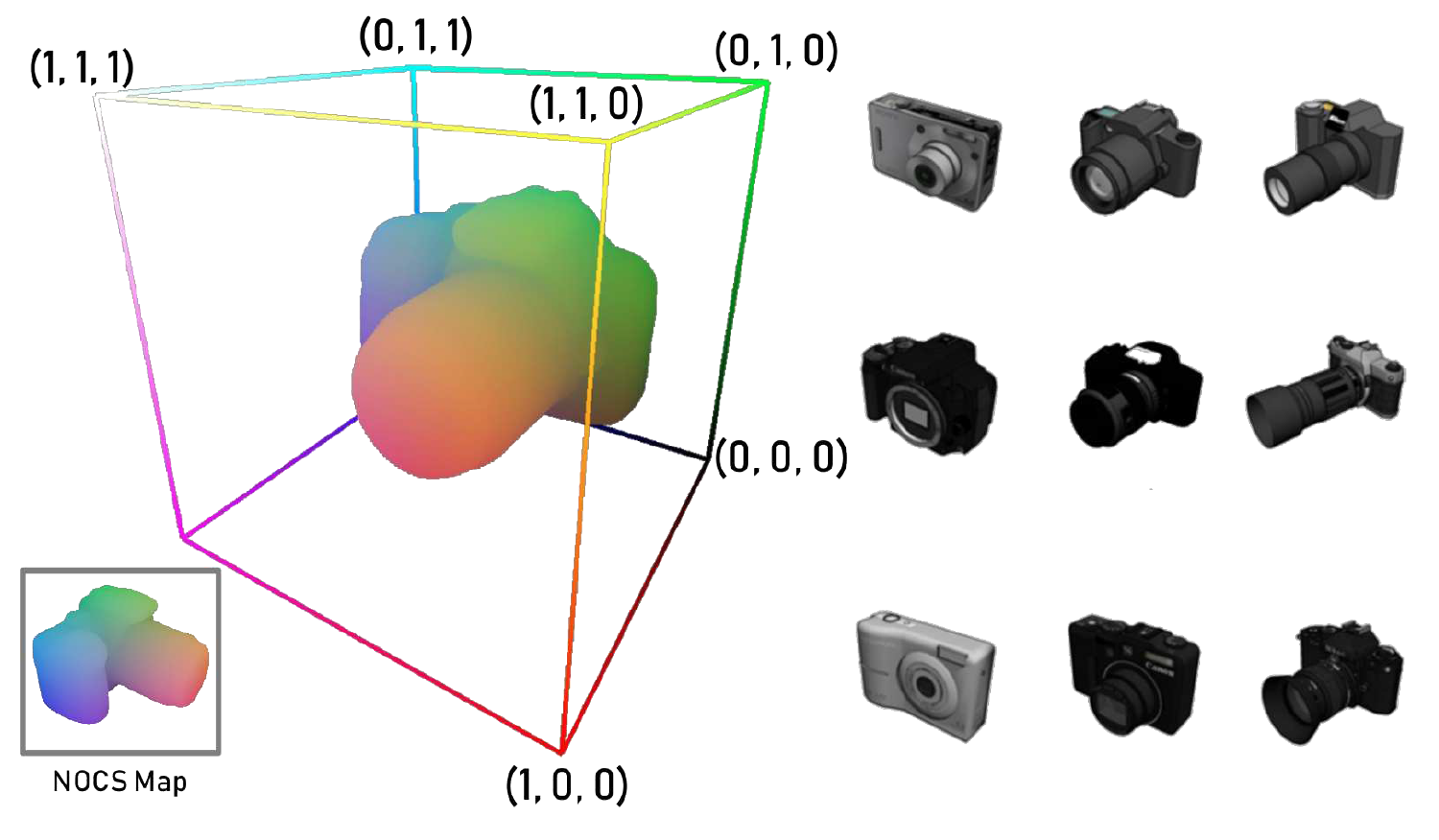
H. Wang, S. Sridhar, J. Huang, J. Valentin, S. Song, and L. J. Guibas, “Normalized Object Coordinate Space for Category-Level 6D Object Pose and Size Estimation,” in 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, Jun. 2019, pp. 2637–2646, doi: 10.1109/CVPR.2019.00275.
"NOCS"
image from Jared Glover's PhD thesis, 2014
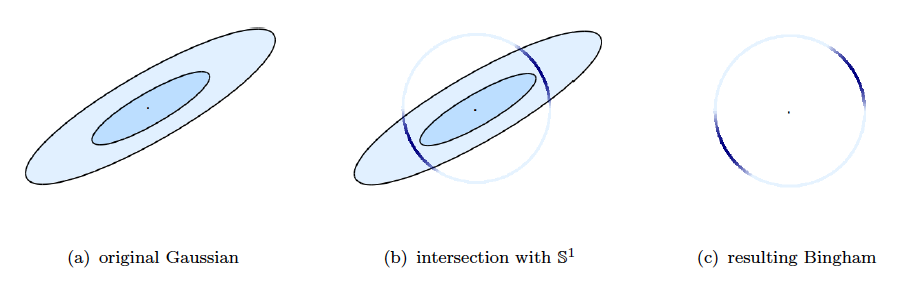
in 2D:
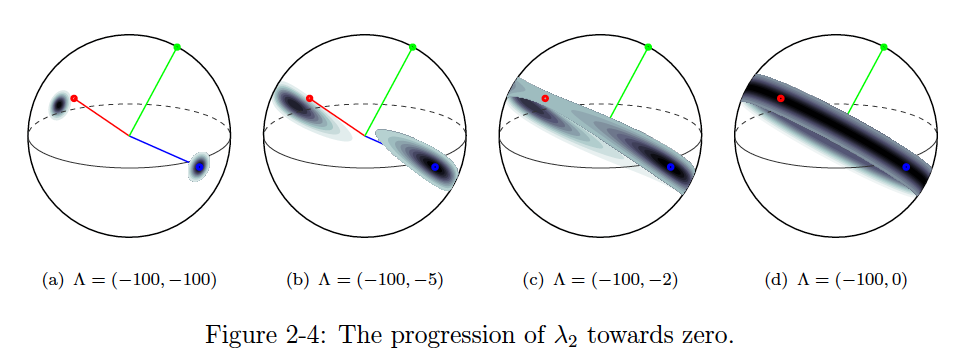
from Jared Glover's PhD thesis, 2014
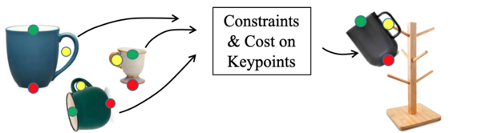
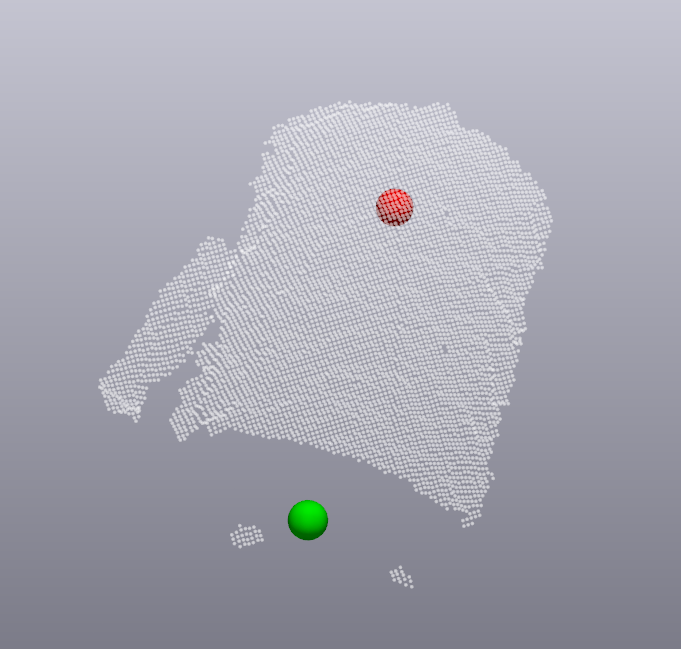
3D Keypoints provide rich, class-general semantics
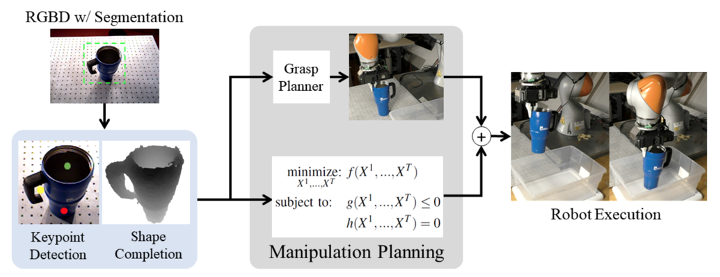
Constraints & Cost on Keypoints
... and robust performance in practice
Lucas Manuelli*, Wei Gao*, Peter R. Florence and Russ Tedrake. kPAM: KeyPoint Affordances for Category Level Manipulation. ISRR 2019
Keypoint "semantics" + dense 3D geometry
https://keypointnet.github.io/
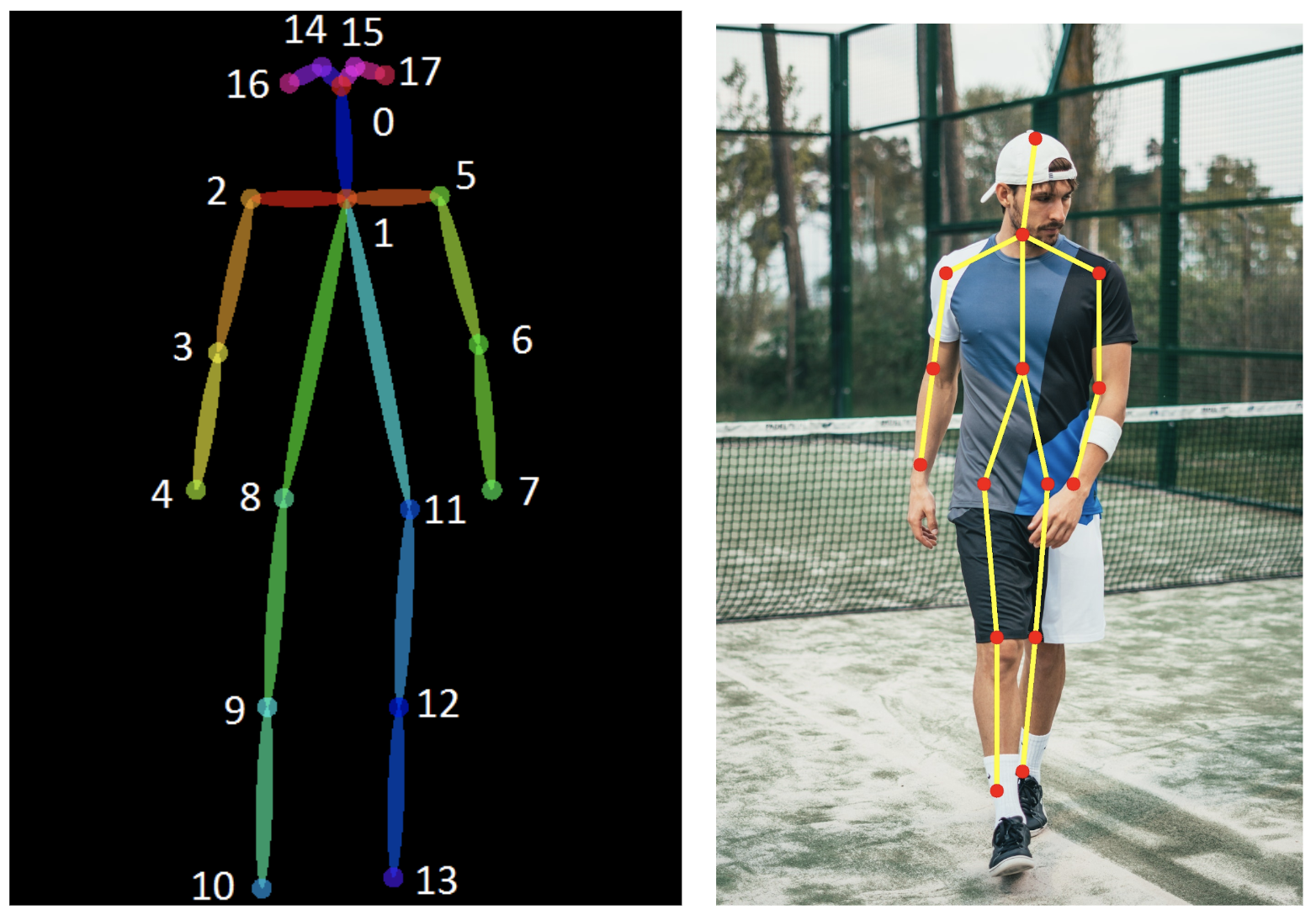
https://nanonets.com/blog/human-pose-estimation-2d-guide/
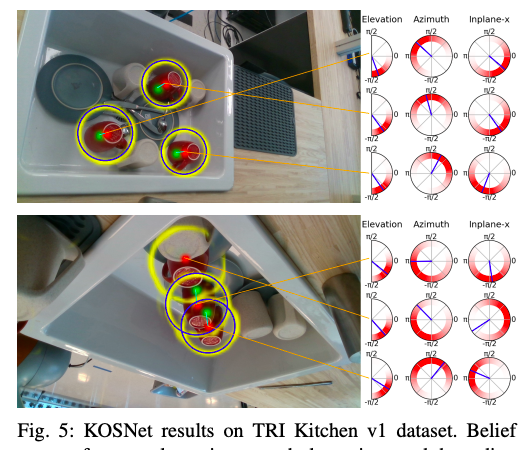
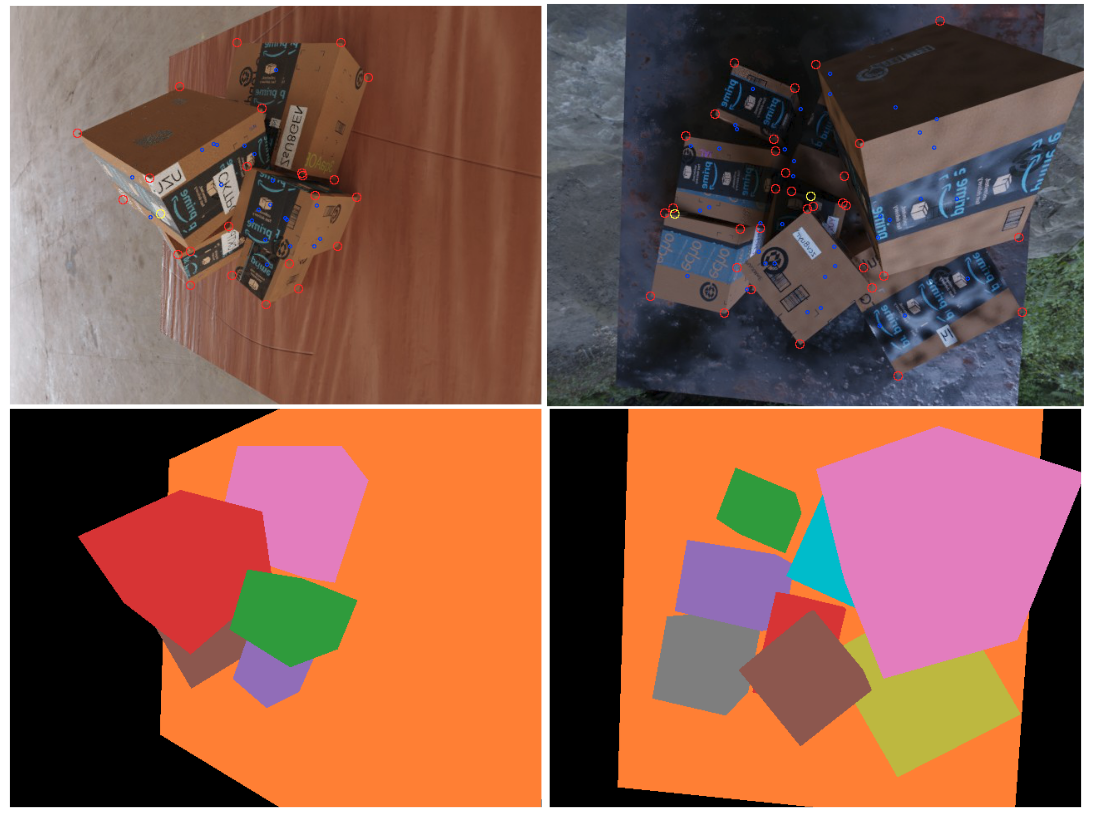
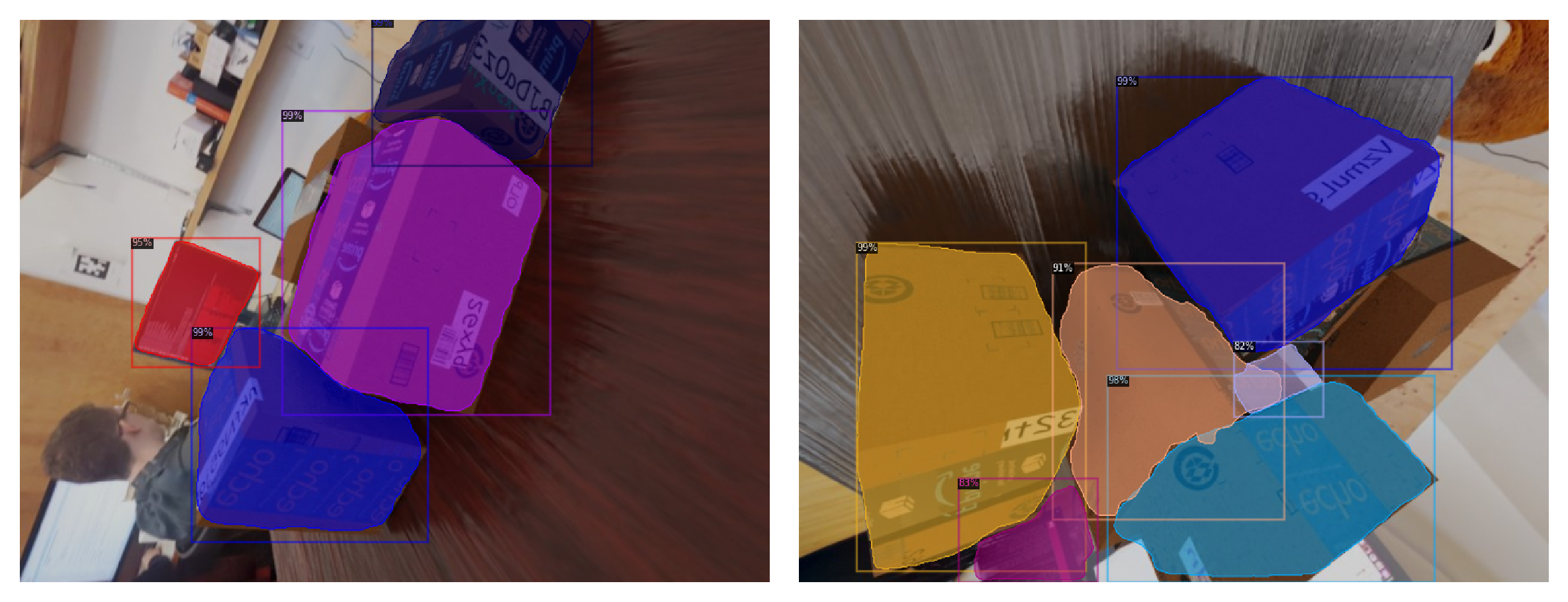
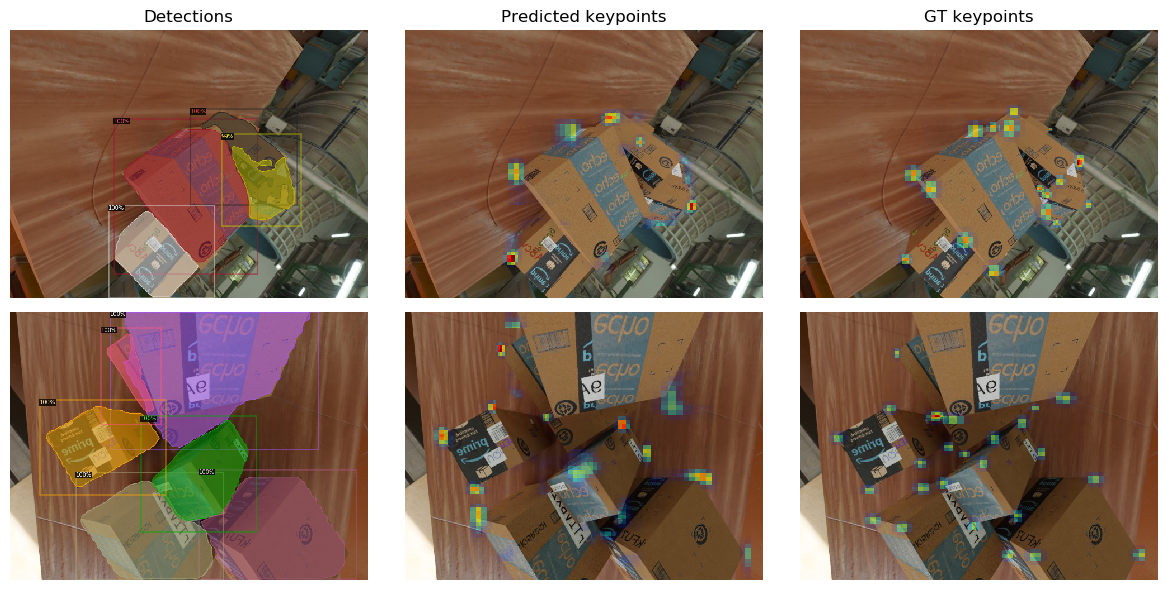
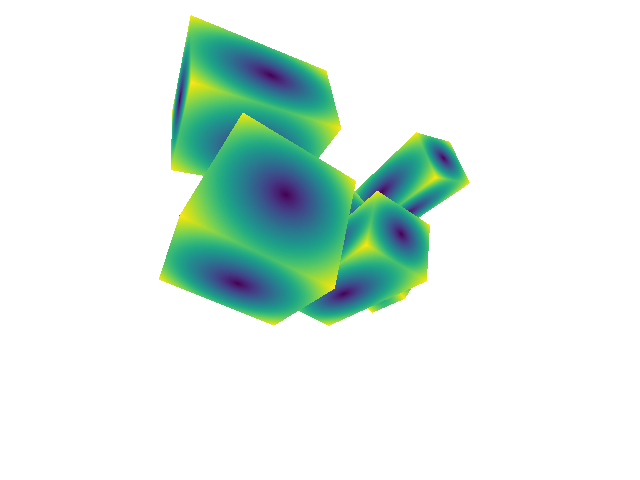
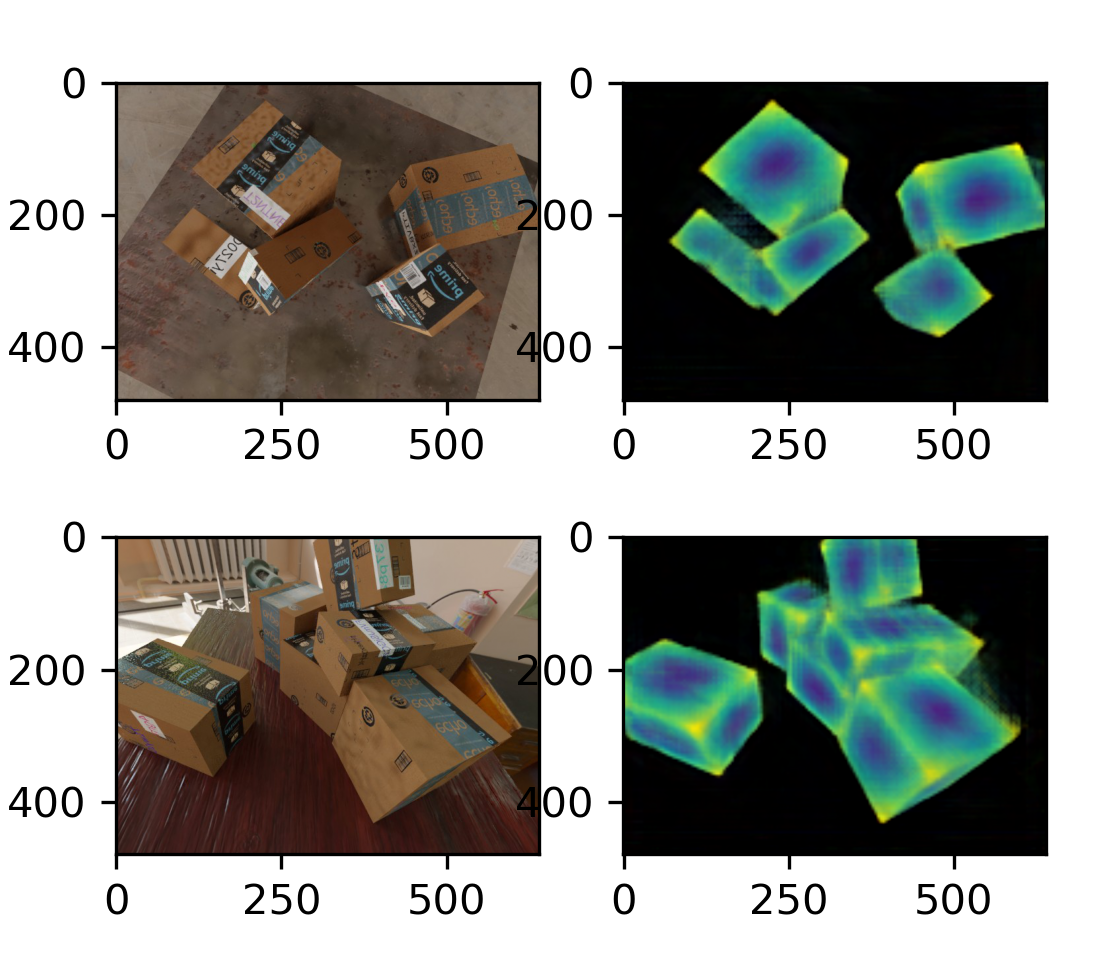
Typically don't predict keypoints directly; predict a "heatmap" instead
box example figures from Greg Izatt
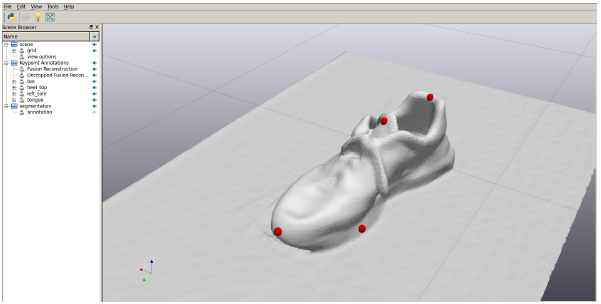
Sample of results
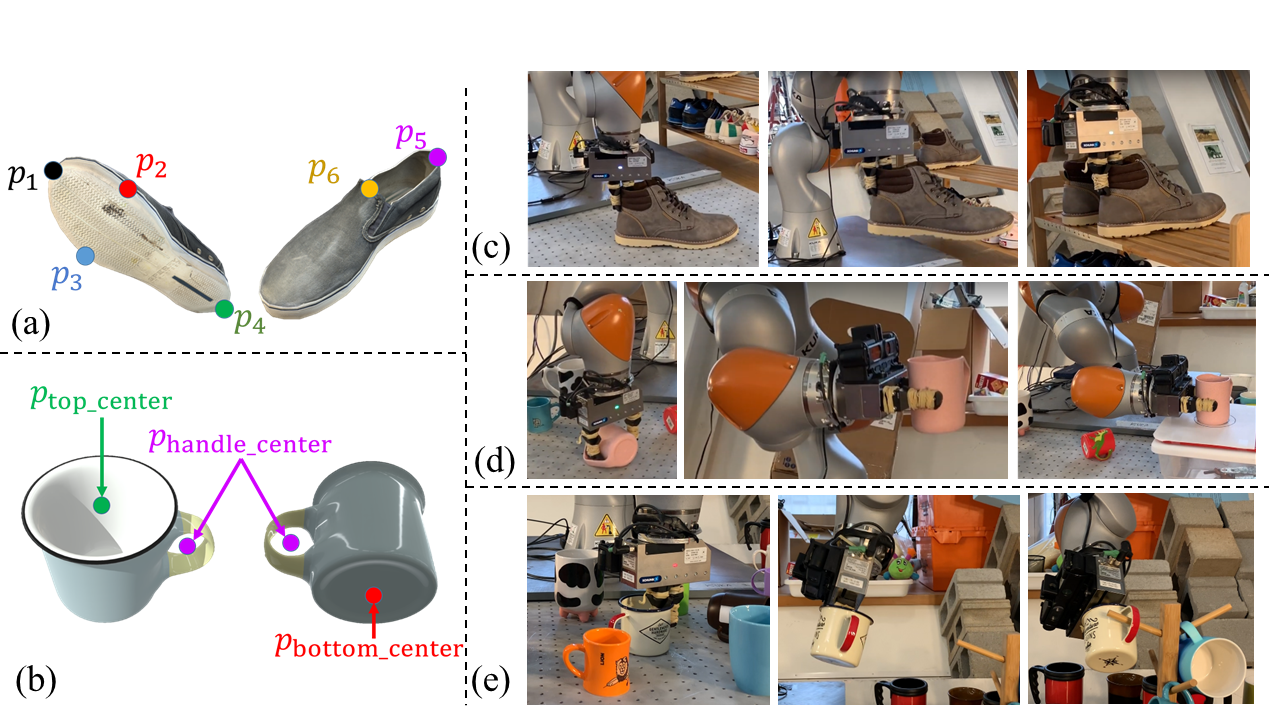
(shoes on rack)
| # train objects | 10 |
| # test objects | 20 |
| # trials | 100 |
| placed on shelf | 98% |
| heel error (cm) | 1.09 ± (1.29) |
| toe error (cm) | 4.34 ± (3.05) |
to include collision-avoidance constraints
So far, keypoints are geometric and semantic
(mug handle, front toe of shoe), but required human labels
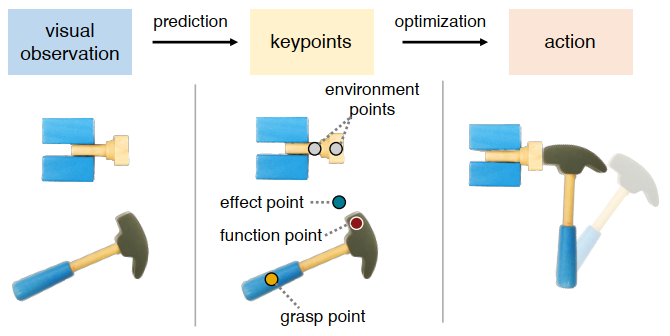
If we forgo semantics, can we self-supervise?
Z. Qin, K. Fang, Y. Zhu, L. Fei-Fei, and S. Savarese, “KETO: Learning Keypoint Representations for Tool Manipulation,” in 2020 IEEE International Conference on Robotics and Automation (ICRA), May 2020, pp. 7278–7285
Core technology: dense correspondences
(built on Schmidt, Newcombe, Fox, RA-L 2017)
Peter R. Florence*, Lucas Manuelli*, and Russ Tedrake. Dense Object Nets: Learning Dense Visual Object Descriptors By and For Robotic Manipulation. CoRL, 2018.
dense 3D reconstruction
+ pixelwise contrastive loss
Good training/loss functions sharpen correspondences
Descriptors as dense self-supervised keypoints
Correspondences alone are sufficient to specify some tasks
Andy Zeng et al. Transporter Networks: Rearranging the Visual World for Robotic Manipulation, CoRL, 2020
By russtedrake
MIT Robotic Manipulation Fall 2022 http://manipulation.csail.mit.edu


