



russtedrake PRO
Roboticist at MIT and TRI
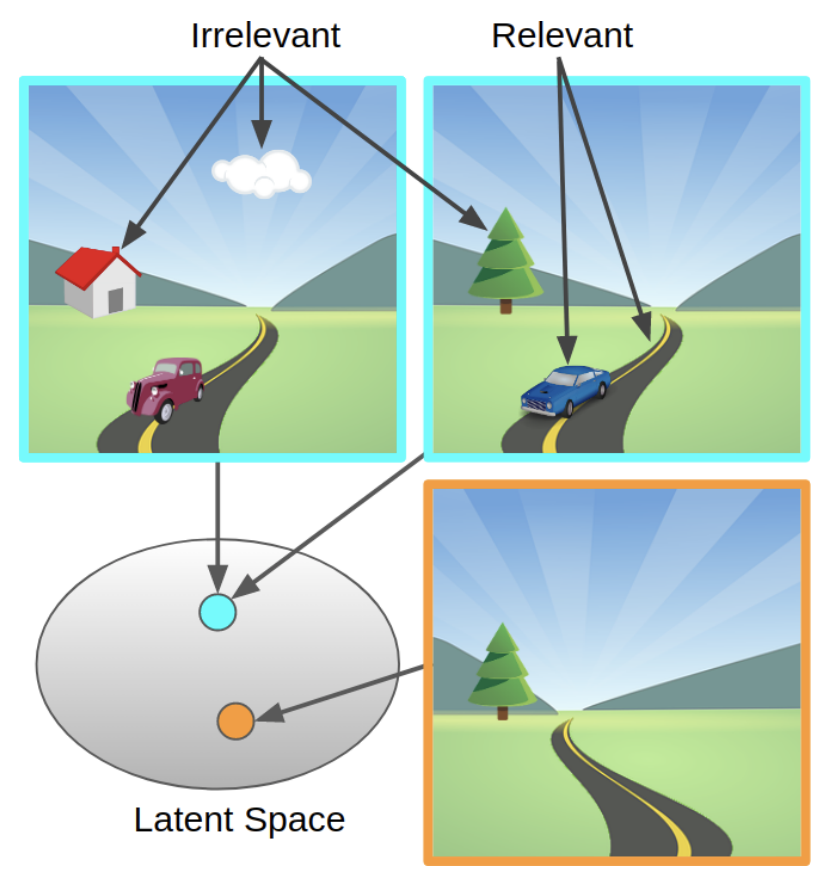
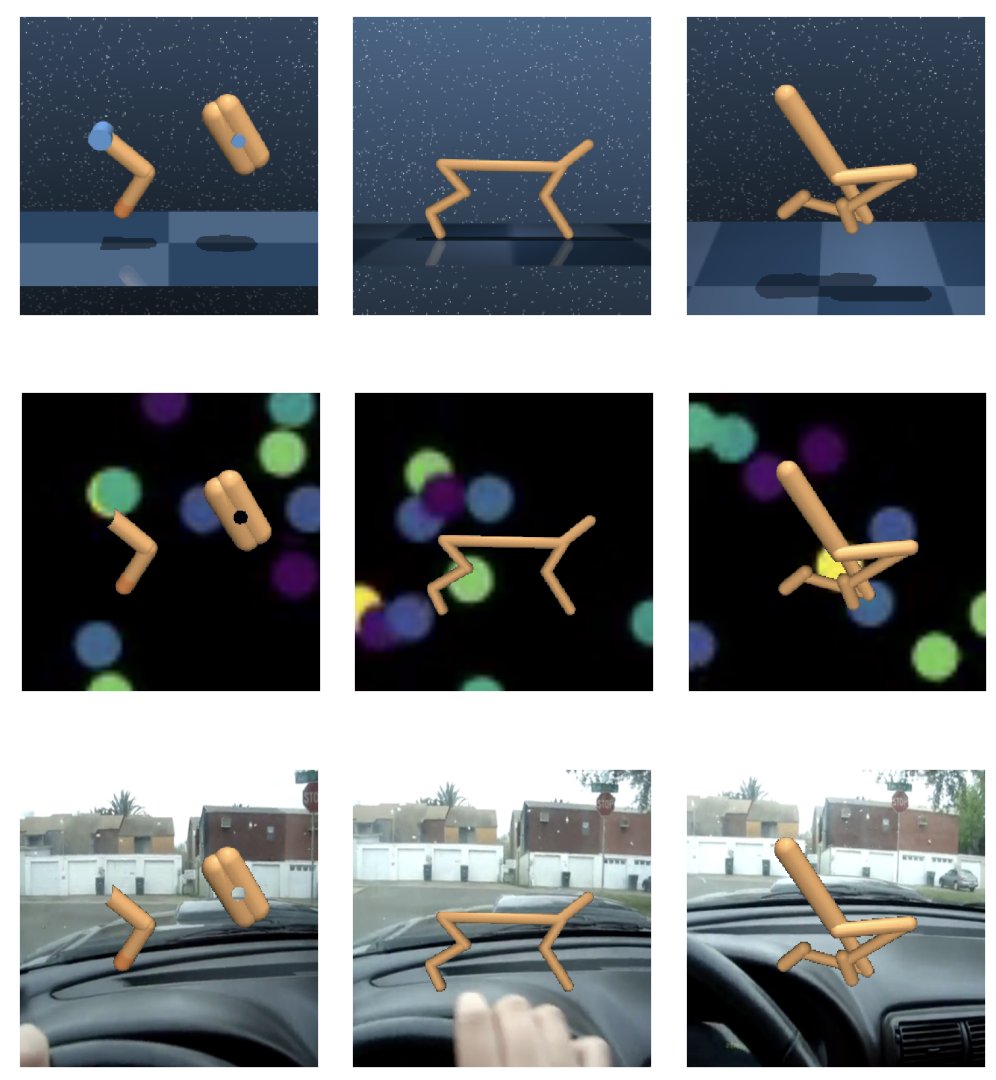
Part 2: Learning state representations
MIT 6.4210/2:
Robotic Manipulation
Fall 2022, Lecture 20
Follow live at https://slides.com/d/5UoMad8/live
(or later at https://slides.com/russtedrake/fall22-lec20)
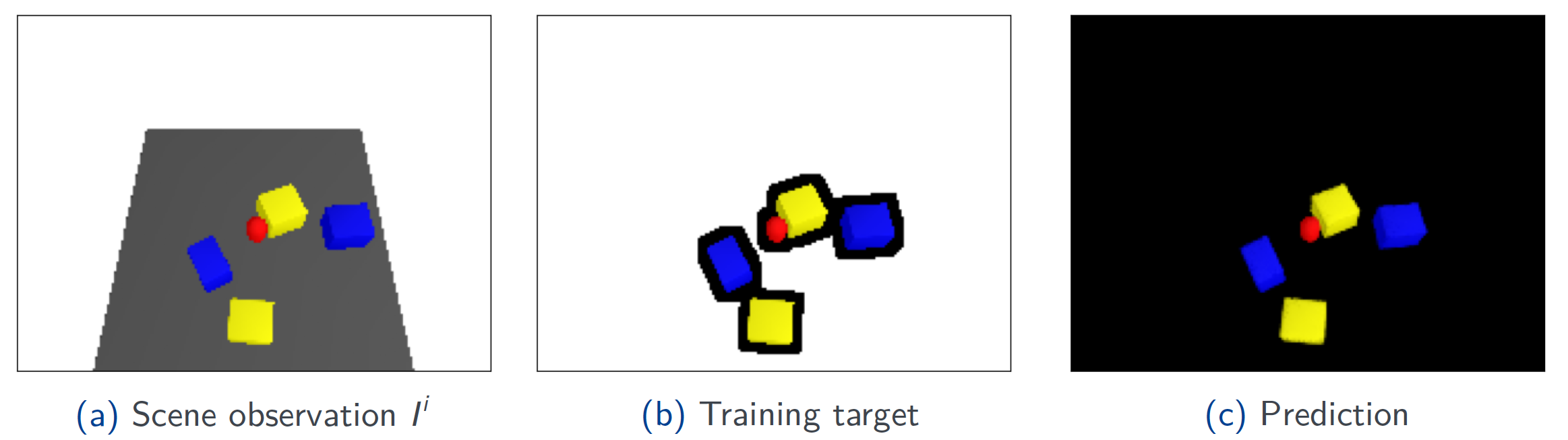
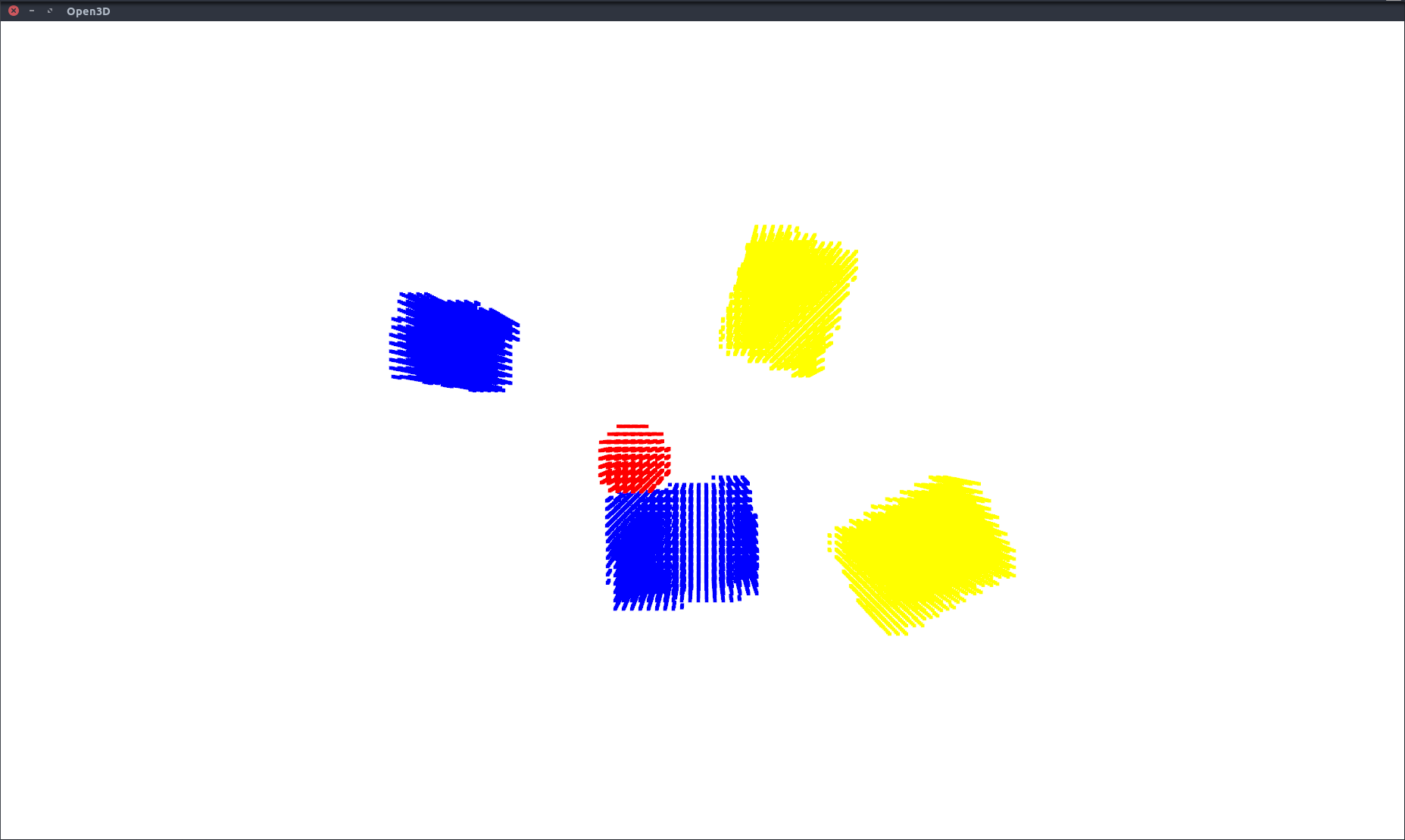
Scene (evaluated on a grid)
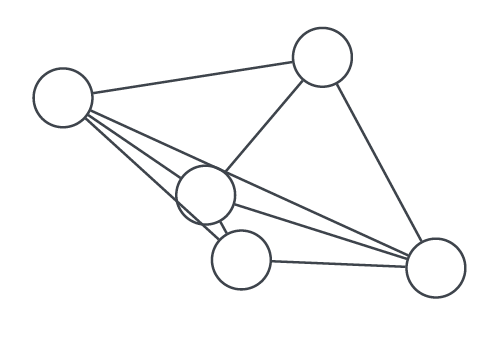
Dense adjacency matrix:
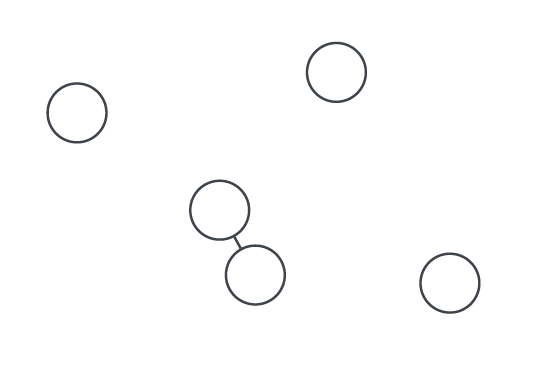
Sparse adjacency matrix:
work by Yunzhu Li
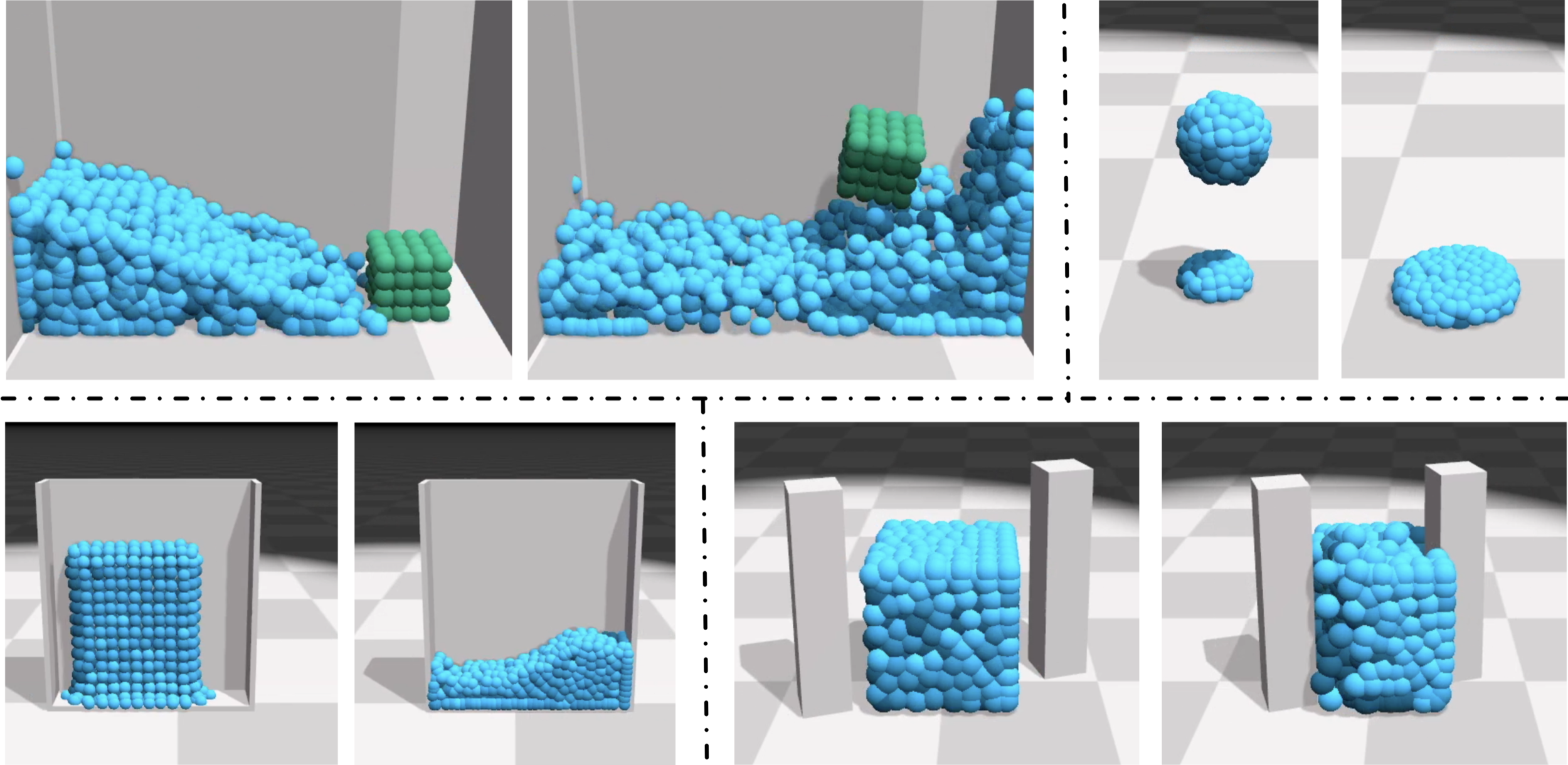
Macklin, Muller, Chentanez, Kim. ACM TOG 33(4)
NVIDIA FleX
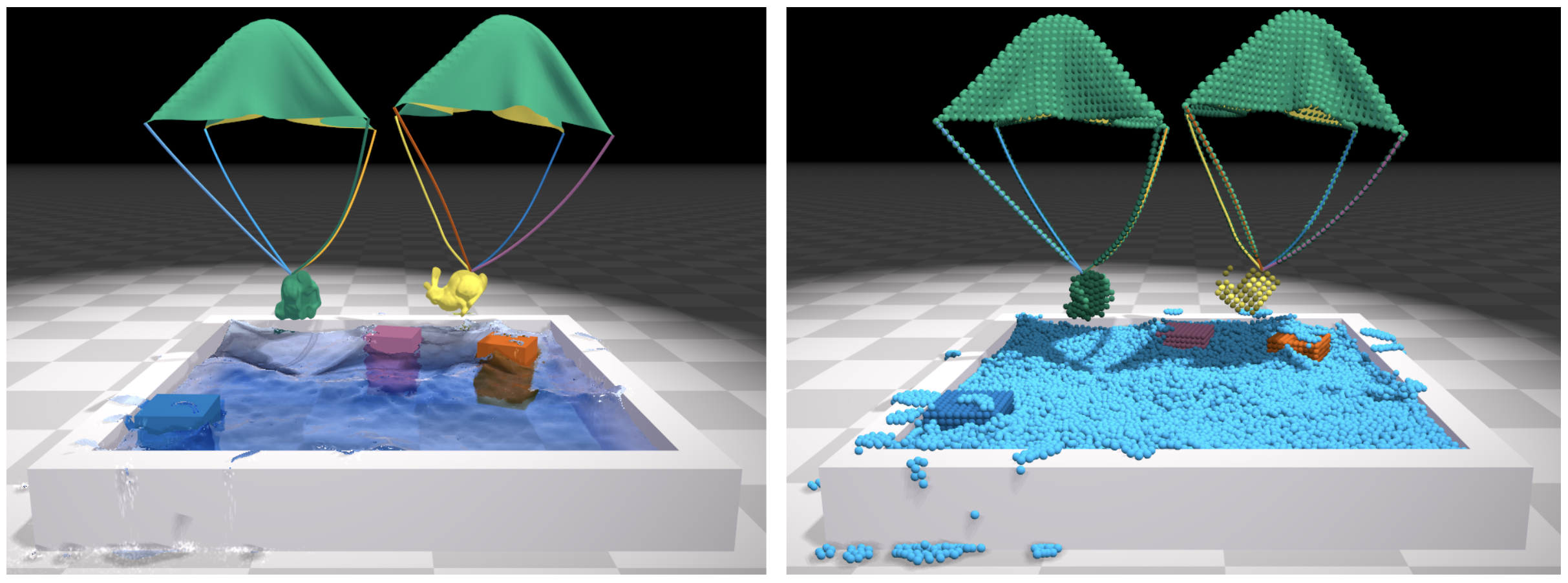
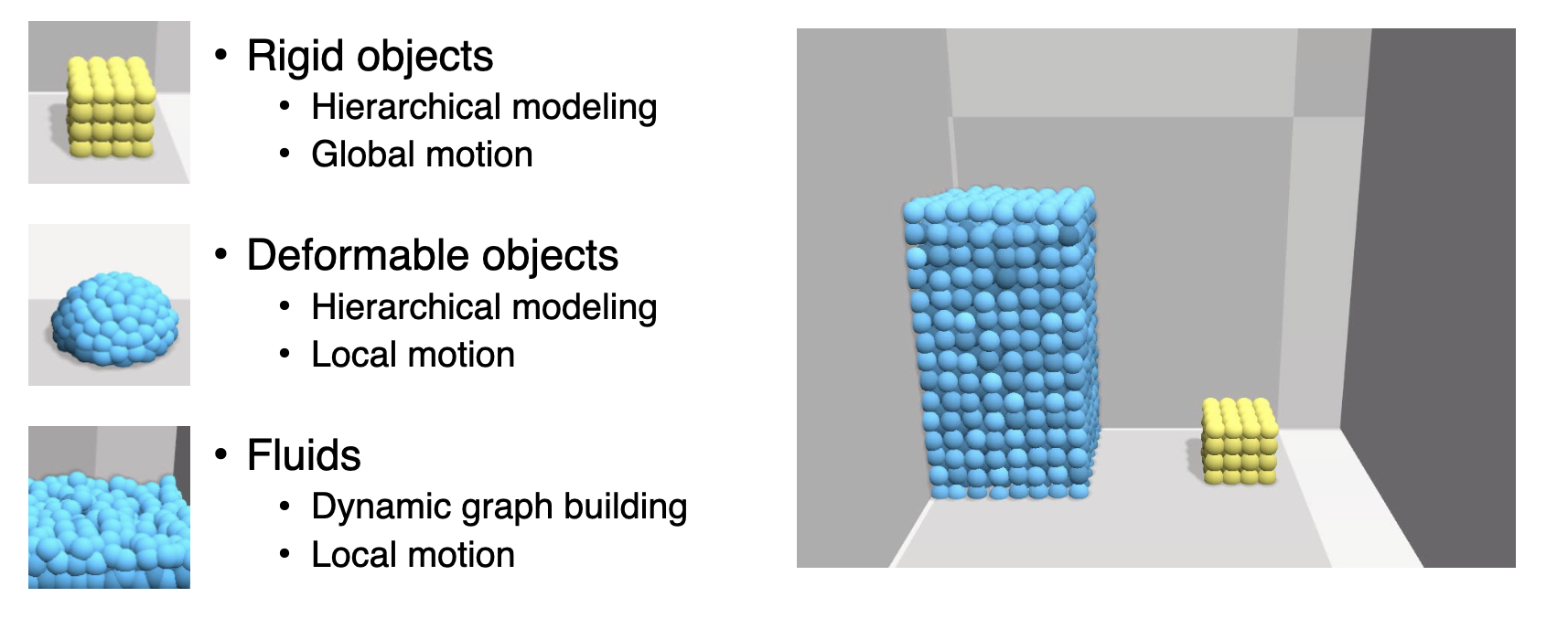
Model is a graph-neural network (GNN), with adjacency based on location, but also object type
Ground truth
Model roll-out
Ground truth
Model roll-out
Ground truth
Model roll-out
A few closing thoughts:
By russtedrake
MIT Robotic Manipulation Fall 2022 http://manipulation.csail.mit.edu


